THESE
En vue de l’obtention du
DOCTORAT DE L’UNIVERSITE DE TOULOUSE
Université Toulouse III – Paul Sabatier
Ecole doctorale : Sciences de l’Univers, de l’Environnement et de l’Espace Spécialité : Télédétection des océans, de l'atmosphère et des surfaces continentales
Charles Desportes
Quelle correction troposphérique humide pour
l’altimétrie côtière et continentale ?
Présentée et soutenue le 29 septembre 2008, devant le jury suivant :
Nick Hall Président du jury
Laurence Eymard Directrice de thèse
Estelle Obligis Encadrante
Remko Scharroo Rapporteur
Jacques Verron Rapporteur
Remerciements
A l’issue de ces trois années de thèse, je tiens à remercier un certain nombre de personnes qui m’ont accompagné, aidé, soutenu, encouragé tout au long de cette aventure.
Je fais partie de ces thésards qui ont eu la chance d’être bien encadrés, par des personnes agréables et compétentes. Merci tout d’abord à Estelle qui m’a si bien suivi, motivante et compréhensive, dés le début du stage qui a précédé la thèse. J’ai eu beaucoup de plaisir à travailler avec toi au jour le jour. C’est en grande partie grâce à toi que ma thèse s’est bien passée ! Je sais que nous allons rester en contact et je m’en réjouis. Un grand merci aussi à toi Laurence : tu as toujours efficacement dirigé mon travail et tu as été à chaque fois présente quand j’en avais besoin.
Je remercie également tous les membres du jury : merci aux rapporteurs Jacques et Remko pour leurs commentaires constructifs, et leurs compliments ! Merci à Nick pour sa présence dans mon jury. Merci à Juliette et Florence d’avoir si gentiment accepté d’être examinatrices, et merci à Florence également de m’accueillir actuellement au sein de son équipe au CNRM.
Je voudrais aussi remercier, au CNES, Thierry Amiot, Nathalie Steunou, Eric Thouvenot. Au CNRM, Fatima Karbou. A CLS, l’équipe TMSS qui m’a accueilli, et tous ceux de la DOS qui m’ont aidé et écouté (la liste est longue !).
Cependant, il faut dire que pendant plus de trois ans je n’ai pas uniquement parlé de radiométrie micro-ondes avec les gens, eh non ! J’ai notamment beaucoup parlé d’écologie, d’environnement, de spiritualité, d’hédonisme, de philosophie (j’ai dû supprimer de mon manuscrit, au prix de pénibles renoncements, de longs passages militants !), également de cinéma, de musique, de recettes de cuisine, de bouquins, de voyages, de femmes enceintes, de vélos crevés, de pantalons, de déménagements, de factures de gaz (ça j’aurais eu plus de mal à le placer dans le manuscrit)... J’ai rencontré tout plein de gens sympas, et parmi ces gens, certains sont devenus des amis. Alors, les amis, merci à chacun de vous de m’avoir offert votre amitié, merci d’être ce que vous êtes ! Je vous porte avec moi dorénavant. Merci pour tous ces petits ou grands moments passés ensemble. Merci aussi pour les superbes cadeaux après la soutenance, le hamac a bien apprécié l’ombre des manguiers du Burkina Faso ! (oui, je suis allé faire des mesures in-situ d’émissivité terrestre).
Merci du fond du cœur à Annabelle, Isabelle, Bruno, Olivier, Tony, Sébastien, Anne-Lise, Marianna, Marion, Julien, Marc, Ludivine. Merci à Louna et à Sonia, qui m’ont bien encouragé vers la fin. Merci à tous ceux que j’ai rencontrés, même ceux dont j’ai oublié le prénom. Merci à ceux qui aiment bien lire les remerciements. Merci à mes parents pour leur aide précieuse (« La hauteur de la mer ? Facile, c’est zéro ») ! Merci au monsieur qui courait, comme moi, après le train qui était parti à l’heure – à cette époque je cherchais un stage et il m’avait conseillé d’envoyer un mail à CLS. Merci au hasard, qui jusqu’ici a souvent bien fait les choses.
« Tout est lié. Tout est vivant. Tout est interdépendant. »
Sommaire
Introduction... 9
Partie 1 : Contexte, problématique... 11
I - L’altimétrie spatiale... 13
1 - Pour quoi faire ?... 13
2 - Le principe de l’altimétrie satellitaire ... 15
a - L’altimètre... 15
b - Les corrections ... 17
3 - La correction troposphérique humide ... 19
a - Pourquoi un radiomètre ? ... 19
b - Les missions altimétriques et leurs radiomètres ... 20
II - Le radiomètre micro-ondes ... 21
1 - Quelques notions de base ... 21
a - La température de brillance ... 21
b - Le transfert radiatif... 22
c - L’absorption atmosphérique... 23
2 - La restitution de la correction troposphérique humide (dh) ... 24
a - La dh ... 24
b - Les méthodes de restitution... 24
III - La correction troposphérique humide près des côtes ... 26
1 - L’effet de la Terre sur la mesure du radiomètre ... 26
2 - De l’antenne du radiomètre et sa tache au sol… ... 26
3 - … à la mesure ... 28
4 - La « contamination » de la mesure ... 29
IV - Les enjeux de l’altimétrie côtière ... 31
Partie 2 : Evaluation des méthodes existantes, développement du simulateur. ... 35
I - Introduction ... 37
1 - Présentation des données et des simulations utilisées ... 37
2 - Le choix de la construction d’un simulateur de radiomètre ... 38
3 - Le problème inverse... 39
II - Le simulateur de radiomètre ... 40
1 - Zone et jours d’étude... 40
2 - Le développement du simulateur ... 40
a - Première étape : le modèle de transfert radiatif ... 40
b - Deuxième étape : utilisation d’une carte d’émissivité terrestre... 41
c - Troisième étape : prise en compte du lobe d’antenne... 43
3 - Un algorithme de restitution adapté à nos simulations... 47
III - Evaluation des méthodes actuelles... 48
1 - Sans traitement particulier des côtes ... 49
2 - Utilisation de la dh ECMWF (European Center for Medium-range Weather Forecast) ... 50
3 - Propagation de la dernière dh non contaminée ... 51
4 - Utilisation de la dynamique du modèle ECMWF ... 52
Partie 3 : Deux propositions pour corriger les TBs... 57
I - Une correction analytiques des TBs : la méthode « erf ». ... 59
1 - La fonction de correction ... 59
2 - Tests de sensibilité ... 61
a - Sensibilité à l’erreur sur la TB ... 61
b - Sensibilité à l’erreur sur θ ... 62
3 - Discussion ... 63
II - En utilisant la proportion de terre dans la tache au sol... 64
1 - La méthode de la proportion ... 64
2 - Discussion ... 66
III - Analyse des performances... 68
1 - Performance de la méthode de la proportion ... 68
2 - Comparaison avec la méthode erf ... 68
Partie 4 : Utilisation d’une méthode variationnelle à une dimension (1D-Var)... 73
I - Introduction ... 75
1 - Le choix d’une méthode variationnelle ... 75
2 - Principe général d’une méthode variationnelle à une dimension ... 76
a - L’assimilation variationnelle de données ... 76
b - Application à notre étude ... 76
c - La fonction de coût... 76
3 - Les outils utilisés... 77
II - Construction de la méthode ... 78
1 - Description de la méthode adoptée et des données utilisées ... 78
a - La zone d’étude ... 78
b - Les données météorologiques ... 79
c - Les observations... 81
d - La méthode... 81
2 - Les contraintes et les choix qui ont été faits... 82
a - Les fréquences utilisées et le vent ... 82
b - La température de surface ... 84
c - Les profils atmosphériques et la matrice de covariance d’erreur de l’ébauche ... 85
3 - Résultats à ce point de l’étude... 88
a - Avec un algorithme de restitution paramétrique ... 88
b - Avec le 1D-Var ... 90
4 - Traitement spécifiques des points côtiers... 92
a - La température de surface ... 92
b - L’émissivité... 92
c - Etude de sensibilité de l’émissivité ... 93
III - Résultats et analyse des erreurs ... 100
1 - Résultats obtenus avec le traitement côtier ... 100
a - L’erreur sur la dh... 100
b - L’amélioration... 102
c - Les profils restitués ... 102
2 - Analyse des erreurs ... 103
a - Corrélation avec l’erreur de départ... 103
b - La simulation des TBs... 105
3 - Apport de la méthode ... 108
4 - Comparaison avec la méthode de la proportion ... 108
Partie 5 : Application du 1D-Var à des données réelles. ... 113
I - Récupération et mise en forme des données ... 115
1 - Les données GPS ... 115 2 - Les mesures... 115 a - Le produit Jason ... 115 b - L’ajustement des TBs... 116 3 - L’ébauche... 117 a - Extraction et traitements... 117
b - L’eau liquide nuageuse... 119
4 - Les atlas d’émissivités terrestres ... 119
II - Résultats et analyse... 120
1 - Les résultats : analyse quantitative et qualitative ... 120
a - Validation de la dh : quelle référence ? ... 120
b - Observation des traces... 121
c - La dh GPS ... 122
d - La dynamique du signal ... 122
e - Les données JMR manquantes ... 123
2 - Sources d’erreur et propositions d’améliorations... 123
a - La température de surface ... 123
b - L’émissivité... 124
c - La proportion de terre... 126
d - La distance à l’ébauche ... 127
3 - Les limites... 128
III - Conclusion de cette partie... 131
Conclusions, perspectives ... 133
Bibliographie ... 139
Table des illustrations ... 143
Introduction
L’océan couvre plus des deux tiers de la surface de la Terre. Il joue un rôle fondamental dans l’équilibre thermique de la planète : par les échanges de chaleur avec l’atmosphère, l’absorption du CO2, il constitue un régulateur du climat et un témoin des évolutions climatiques. L’observer, en analyser les mécanismes, permet de comprendre et même de prévoir les évolutions du climat.
L’altimétrie spatiale, développée à partir des années 1970, apporte une grande contribution à la connaissance des océans. Aujourd’hui, les radars altimètres mesurent avec une précision de quelques centimètres la hauteur instantanée de la surface océanique. Ils observent les océans sur la planète entière, avec une répétitivité régulière : cette couverture globale permet d’observer les océans dans leur ensemble, de distinguer des tendances… Désormais l’océanographie ne saurait se passer des mesures altimétriques, pour de très nombreuses applications : construire des modèles de circulation, prévoir les courants (c’est l’océanographie opérationnelle).
A la frontière de l’océan et des terres apparaissent les limites de l’altimétrie. De nombreuses recherches actuelles sont dédiées à l’altimétrie côtière, et également continentale (sur les lacs et bassins fluviaux), en vue de fournir et d’utiliser des mesures altimétriques aussi précises près des côtes qu’en pleine mer. L’exploitation des mesures altimétriques repose en effet sur la possibilité de corriger la mesure du trajet du signal radar de toutes les perturbations qui l’affectent, près de la surface ou pendant sa traversée de l’atmosphère. A l’approche des côtes, le signal radar est fortement perturbé par le relief voisin, par les vagues, par des phénomènes atmosphériques spécifiques aux zones côtières. L’humidité atmosphérique, essentiellement concentrée dans la troposphère, ralentit le signal, et doit être corrigée (d’où l’appellation de « correction troposphérique humide ») : en plein océan elle est déduite des observations du radiomètre micro-ondes, antenne passive placée à côté de l’altimètre et dédiée à cette restitution. Mais près des côtes, les mesures sont contaminées par la présence dans son champ de vue de terres émergées, dont les caractéristiques sont trop différentes de celles d’une surface océanique : on ne parvient plus à déduire de façon aussi précise le contenu en humidité de l’atmosphère sous l’altimètre. Par conséquent la mesure altimétrique est peu précise elle aussi.
L’exploitation de l’altimétrie près des côtes devient un enjeu important pour l’océanographie. Des application variées tireraient grand profit d’une amélioration de la précision des mesures : citons par exemple les modèles de marée, le suivi du niveau moyen, les modèles de circulation régionale, les bilans hydrologiques sur les bassins continentaux.
Nous nous intéressons dans cette thèse à la restitution de la correction troposphérique humide. L’objectif est d’estimer la faisabilité d’une restitution opérationnelle de la correction troposphérique humide sur les zones de transition, qui vérifierait les contraintes liées au traitement de la mesure altimétrique en terme de précision et de résolution spatiale.
La première partie est une introduction détaillée : nous présentons le contexte général et la problématique. Nous introduisons les concepts et les outils dont la maîtrise a été nécessaire au bon déroulement de ce travail de thèse.
La deuxième partie est consacrée à l’évaluation des méthodes actuellement utilisées pour fournir une correction troposphérique près des côtes. Ceci a été fait par l’intermédiaire d’un simulateur de radiomètre, que nous avons construit, et dont nous détaillons le développement. La troisième partie propose deux nouvelles méthodes de restitution, basées sur la « décontamination » préalable des mesures du radiomètre à l’approche des côtes. Ces deux méthodes sont évaluées puis comparées.
Dans la quatrième partie nous construisons une méthode variationnelle de restitution de la correction troposphérique humide. Cette nouvelle stratégie prend en compte tous les paramètres en jeu. Des simulations sont utilisées pour effectuer des tests de sensibilité. La méthode est ensuite comparée aux méthodes précédemment proposées.
Dans la cinquième partie, nous appliquons la méthode sur des données réelles pour en évaluer la faisabilité.
La manuscrit s’achève sur des conclusions et des propositions de travaux qui feraient suite à cette étude.
Partie 1 : Contexte, problématique.
I - L’altimétrie spatiale 1 - Pour quoi faire ?
2 - Le principe de l’altimétrie satellitaire a - L’altimètre
b - Les corrections
3 - La correction troposphérique humide a - Pourquoi un radiomètre ?
b - Les missions altimétriques et leurs radiomètres II - Le radiomètre micro-ondes
1 - Quelques notions de base
a - La température de brillance b - Le transfert radiatif
c - L’absorption atmosphérique
2 - La restitution de la correction troposphérique humide (dh) a - La dh
b - Les méthodes de restitution
III - La correction troposphérique humide près des côtes 1 - L’effet de la Terre sur la mesure du radiomètre 2 - De l’antenne du radiomètre et sa tache au sol… 3 - … à la mesure
4 - La « contamination » de la mesure IV - Les enjeux de l’altimétrie côtière
I - L’altimétrie spatiale
1 - Pour quoi faire ?
La principale mission de l’altimétrie spatiale est de mesurer le relief des océans par satellite. Mesurer le relief moyen, car la terre, qui n’est pas plate (Traité du Ciel, Aristote, IVe siècle av. JC), n’est pas non plus parfaitement sphérique, et mesurer également les variations de relief : les variations dues aux courants, aux marées, aux vagues, et les variations du niveau moyen… Ce relief change constamment. Quand un navire a besoin de semaines ou de mois pour traverser l’océan et faire des mesures dispersées, les satellites fournissent des données fréquentes, régulières, partout (et sans crainte des pirates).
Les variations de hauteur de l’océan ont différentes causes, à différentes échelles dans l’espace et le temps : on distingue les ondulations permanentes, qui se retrouvent dans le niveau moyen, et les variations par rapport à la moyenne liées à la dynamique de l’océan. A l’échelle de la planète, la surface de l’océan présente de façon permanente des creux et des bosses qui atteignent jusqu’à 100 mètres d’amplitude, dus aux variations locales du champ de gravité. La distribution inhomogène de la matière à l’intérieur du globe crée ces variations du champ de pesanteur. On représente souvent l’équipotentielle du champ de pesanteur terrestre, appelée géoïde (Fig. 1) (1 Gal = 1 cm/s²) :
Figure 1 : Le géoïde terrestre, anomalies du champ de gravité (document NASA).
A l’échelle de quelques kilomètres ou centaines de kilomètres, la surface de l’océan présente encore des creux et des bosses, de quelques mètres de haut, dus cette fois aux reliefs sous-marins qui créent un excès local de masse. La roche étant plus dense que l’eau, la verticale locale, déterminée par la direction de la force de gravité, s’en trouve modifiée. On observe donc une accumulation d’eau au-dessus des reliefs sous-marins, visible depuis l’espace. Ces variations peuvent être cartographiées en moyennant sur un grand nombre d’année les mesures altimétriques : c’est la surface moyenne océanique (figure 2).
Figure 2 : Surface moyenne océanique (Aviso)
C’est le niveau moyen global qui est en hausse ! Bien sûr, le niveau ne monte pas partout de la même façon : à certains endroits du globe il diminue même – mais en moyenne, il monte. Depuis 3000 ans et jusqu’au début du XIXe siècle, le niveau moyen n’a pratiquement pas bougé. Il augmente depuis 1900 de 1 à 2 mm/an (IPCC, Climate change 2001). Les mesures altimétriques indiquent qu'entre 1993 et 2003, le niveau moyen global de la mer s'est élevé de 3.1 ± 0.7 mm/an. Cependant, rien ne permet encore de faire la part entre tendance réelle pour le siècle à venir ou variations interannuelles de cette élévation. Seules de longues séries de données, parfaitement échantillonnées, permettront de s'affranchir de ces doutes.
Cette élévation est une conséquence du réchauffement climatique observé depuis quelques décennies, que les experts du GIEC (Groupe d'experts intergouvernemental sur l'évolution du climat, IPCC en anglais) ont attribué avec une probabilité supérieure à 90% à l’activité humaine. On constate en effet une très forte corrélation entre la hausse de la température moyenne du globe et la concentration en CO2 dans l’atmosphère. Les humains génèrent, par
leurs activités, un excès de gaz à effet de serre dépassant la capacité des écosystèmes à les piéger et les absorber. L’utilisation massive de combustibles fossiles (transports, industrie, agriculture, habitation), la déforestation, les rejets de méthane (à cause notamment de l’agriculture intensive), sont les principales sources de gaz à effet de serre.
Ensuite viennent les effets non permanents, que l’on exprime en général en anomalie de hauteur de mer, par rapport au niveau moyen. Citons par exemple la circulation globale (des courants comme le Gulf Stream, le Kuroshio, les ondes planétaires de Rossby et de Kelvin), la circulation méso-échelle (les tourbillons), les marées… La figure 3 montre des anomalies de hauteurs de mer qui révèlent le tourbillon de Iérapétra dans le bassin est de la Mer Méditerranée.
Figure 3 : Anomalies de hauteur de mer en Méditerranée : tourbillon de Iérapétra (Aviso)
2 - Le principe de l’altimétrie satellitaire
a - L’altimètre
Le principe de l’altimétrie spatiale, illustré sur la figure 4, est le suivant : le radar altimètre envoie une onde vers la surface, et grâce au temps mis par l’onde pour revenir au satellite on calcule la distance qui sépare le satellite de la surface réfléchissante : c’est la distance altimétrique. Si par ailleurs on connaît précisément la distance entre le satellite et l’ellipsoïde de référence, on connaît pas soustraction la hauteur du niveau de la mer. Enfin, la connaissance de la forme précise du géoïde, donne accès à la topographie dynamique, variation instantanée du niveau de la mer.
L’onde radar de retour, qui a été en partie dispersée par la rugosité de la mer, contient de nombreuses informations sur la surface réfléchissante. Le schéma de la figure 5 montre comment se forme l’onde retour : les crêtes réfléchissent l’onde en premier (c’est le début du « front de montée »), puis le creux des vagues (fin du front de montée), puis les vagues plus éloignées (décroissance de l’intensité). Le milieu du front de montée donne la distance altimétrique, la pente du front de montée informe sur la hauteur des vagues (la crête renvoie l’onde avant le creux des vagues), l’amplitude P du signal donne le coefficient de rétrodiffusion de la surface, lié au vent (figure 6).
Figure 4 : Le principe de l’altimétrie satellitaire (document CNES)
Figure 6 : Forme d’onde (document Aviso)
b - Les corrections
De nombreuses perturbations entrent en ligne de compte dans le calcul de la distance altimétrique. Pour cette raison, il est nécessaire d’apporter un certain nombre de corrections à la mesure du trajet du signal radar, qui a tendance à être surestimée à cause des multiples réfractions atmosphériques. D’autre part, les variations du niveau de la mer dues aux marées, ou à la réponse à la pression de l’atmosphère, doivent être retranchées pour pouvoir étudier les effets des courants géostrophiques.
On distingue les corrections instrumentales, les corrections de surface, les corrections géophysiques, et les corrections de propagation.
Les corrections instrumentales : corrections de la dérive des oscillateurs embarqués, des variations du centre de gravité du satellite, et d’autres effets instrumentaux (ordre de grandeur : quelques centimètres).
Les corrections de surface :
• Biais d’état de mer, qui comprend le biais électromagnétique dû au fait que parmi les multiples facettes de la surface de la mer, celles qui sont au creux des vagues réfléchissent mieux l’onde que celles qui sont à la crête des vagues (ordre de grandeur : 0 à 25 cm). Les autres composantes sont dues aux erreurs algorithmiques du retracking. Il est calculé par des algorithmes empiriques non-paramétriques avec une précision de l’ordre de 2 cm (Gaspar, 2002).
• Baromètre inverse : variations de hauteur dues aux variations de pression de l’atmosphère sur la surface océanique (ordre de grandeur : 0 à 20 cm), il est fourni par les modèles météorologiques.
Les corrections géophysiques : elles correspondent à des mouvements prévisibles, qu’il faut soustraire si on ne veut pas en tenir compte.
• Marée océanique, déplacement de masse d’eau sous l’action gravitationnelle du Soleil et de la Lune. Le passage du satellite au-dessus d’un même point à une fréquence
différente de celle des marées crée un effet stroboscopique indésirable pour ceux qui étudient par exemple le niveau moyen (ordre de grandeur : 1 à 15 m près des côtes)
• Marée solide, mouvements de la croûte terrestre (ordre de grandeur : 50 cm)
• Marée polaire due au léger mouvement de l’axe de rotation de la terre (ordre de grandeur : 2 cm)
Elles sont fournies par des modèles de marée, avec une précision d’environ 2 cm.
Les corrections de propagation : si, dans le vide, l’onde radar se propage à la vitesse de la lumière et sans aucune perturbation, ce n’est pas le cas pendant ses deux traversées de l’atmosphère. Les gaz et les particules de l’atmosphère ralentissent et dispersent le signal, il en résulte une erreur d’estimation de la distance altimétrique.
• Ionosphère : le contenu en électrons de la ionosphère perturbe la propagation de l’onde (ordre de grandeur : 0 à 50 cm). La correction ionosphérique est calculée en combinant les mesures de l’altimètre réalisées à deux fréquences (5.3 et 13.6 GHz pour TOPEX/Poséidon), avec une précision d’un demi centimètre.
• Troposphère sèche : correction due aux gaz secs de la troposphère (première couche de l’atmosphère), calculées à partir de modèles météorologiques (ordre de grandeur : 2.3 m).
• Troposphère humide : correction due à la vapeur d’eau de l’atmosphère, principalement concentrée dans la troposphère (ordre de grandeur : 0 à 50 cm)
L’incertitude sur la correction troposphérique humide est actuellement, en plein océan, de 1 cm rms (Eymard et al, 1993, Ruf et al, 1995), et joue un grand rôle dans le bilan global d’erreur sur le niveau de la mer (environ 4 cm rms, Fu et Cazenave, 2001). Les autres principales incertitudes, qui font l’objet de recherches actuelles, sont les marées, le biais d’état de mer et le baromètre inverse.
Il est important de noter que la précision de la mesure altimétrique, qui dépend de la possibilité de corriger la mesure du trajet du signal radar, dépend également de la possibilité de connaître précisément la position du satellite, et ceci a pendant longtemps été un facteur beaucoup plus limitant que les corrections géophysiques, jusqu’à la mission TOPEX/Poséidon (figure 7).
Voici le bilan d’erreur pour le satellite TOPEX :
Bruit de mesure 2.7 cm
Biais électromagnétique 2.0 cm Dissymétrie des vagues 1.2 cm
Ionosphère 0.5 cm
Troposphère sèche 0.7 cm
Troposphère humide 1.1 cm
Erreur d’orbite < 2.5 cm Niveau de la surface de la mer (instantané) < 4.1 cm
Figure 7 : Erreur d’orbite pour les missions passées et actuelles (Aviso)
3 - La correction troposphérique humide a - Pourquoi un radiomètre ?
La correction troposphérique humide, souvent notée dh, est « presque » proportionnelle à la quantité intégrée de vapeur d’eau (6.4 fois la quantité en g/cm² pour une dh en cm, Fu et Cazenave, 2001). Presque, car à la différence du contenu intégré, elle tient compte des profils de température, d’humidité et de pression (à travers la distribution verticale). On peut la calculer, dans la théorie, à partir des profils atmosphériques d’humidité spécifique Q et de température T, et de la constante gravitationnelle g (à une constante k près) :
∑
∆
=
PP
T
Q
g
k
dh
En procédant ainsi, nous pourrions déduire cette correction de sorties de modèles météorologiques comme le modèle du Centre Européen de Prévisions Météorologiques à Moyen Terme (plus souvent appelé ECMWF, pour European Centre for Medium-Range Weather Forecasts).
Seulement, nous avons besoin de cette correction sous chaque mesure de l’altimètre, soit au moins tous les 7 km : les modèles globaux fournissent des analyses globales sur une grille au quart de degré (soit 25 km à l’équateur). Nous avons aussi besoin de cette correction à l’instant exact où l’altimètre survole un point donné : le modèle ECMWF fournit des profils toutes les six heures. La précision des modèles actuels est donc insuffisante pour les échelles spatio-temporelles recherchées.
Un instrument dédié est donc ajouté aux missions altimétriques : un radiomètre micro-ondes. C’est une antenne passive, placée sur la plateforme juste à côté du radar altimètre, qui capte les rayonnements dans la gamme des hyperfréquences (1 à 300 GHz). De ses mesures, faites au même endroit et au même moment que l’altimètre, est déduite la correction troposphérique humide. Le chapitre suivant est consacré au radiomètre micro-ondes.
b - Les missions altimétriques et leurs radiomètres
Voici un tableau récapitulatif des principales missions passées, en cours et futures. Notons que le radiomètre embarqué sur la mission TOPEX est appelé le TMR (Topex Microwave Radiometer), celui de la mission Jason1 le JMR, Jason2 le AMR (A pour Advanced).
Mission Geosat ERS1 TOPEX ERS2 GFO JASON1 ENVISAT JASON2 SARAL
Vie dans l’espace ou lancement prévu 1985-1990 1991-1996 1992-2006 1995- 1998- 2001- 2002- 2008- 2009- Fréquences du radar (GHz) 13.5 13.8 Topex : 13.6, 5.3 Poséidon : 13.6 13.8 13.5 13.575 5.3 13.575 3.2 13.575 5.3 AltiKa : 35 Fréquences du radiomètre (GHz) - 23.8, 36.5 18, 21, 37 23.8, 36.5 22, 37 18.7, 23.8, 34 23.8, 36.5 18.7, 23.8, 34 Couplé altimètre Cycle 23 jours 35 jours 10 jours 35 jours 17
II - Le radiomètre micro-ondes
1 - Quelques notions de base
a - La température de brillance
Tout corps dont la température T est supérieure à 0 Kelvin (soit -273.15 degrés Celsius) émet un rayonnement électromagnétique dont l’énergie dépend de la longueur d’onde λ, répartie suivant la loi de Planck, qui s’écrit (Ulaby) :
1
exp
²
2
)
,
(
5−
=
−kT
hc
hc
T
L
λ
λ
λ
La luminance L est un flux énergétique par unité de surface, par unité d'angle solide et par unité de longueur d'onde, elle s'exprime en W.m-2.m-1.sr-1. Dans l’équation, c est la vitesse de la lumière, k est la constante de Boltzmann et h la constante de Planck.
Dans le domaine des micro-ondes (fréquences de 1 à 300 GHz ou longueurs d’ondes de 30 cm à 1 mm), le rapport dans l’exponentielle est faible, l’approximation de Rayleigh-Jeans est alors possible. L’équation devient :
4
2
)
,
(
λ
λ
T
ckT
L
=
Alors que le rayonnement du corps noir est isotrope (identique dans toutes les directions), celui d'un corps réel peut dépendre de la direction d'observation (θ,Φ). On définit l’émissivité d’un corps réel dans la direction (θ,Φ) comme le rapport de la luminance de ce corps et la luminance d’un corps noir de même température :
corpsnoir corpsréel
L
L
=
Φ
)
,
(
θ
ε
Par définition du corps noir, on aura donc une émissivité inférieure à 1.
Pour une fréquence donnée, on définit la température de brillance TB d’un corps non noir dans la direction (θ,Φ) par la relation suivante :
T
TB
(
θ
,
Φ
)
=
ε
(
θ
,
Φ
)
×
Un radiomètre micro-ondes, embarqué à bord d’un satellite, est une antenne passive qui capte les rayonnements électromagnétiques qui lui arrivent au sommet de l’atmosphère, dans le domaine des micro-ondes. Les mesures sont les températures de brillance, que nous noterons « TBs » par la suite.
b - Le transfert radiatif
Le capteur reçoit les contributions de plusieurs sources : il reçoit à la fois l’émission de la surface, l’émission directe de toutes les couches de l’atmosphère, et l’émission de l’atmosphère réfléchie par la surface (fig. 8). Chaque émission est atténuée lors de son passage à travers l’atmosphère.
Figure 8 : sources des rayonnements captés par l’antenne du radiomètre
En milieu non diffusant, à l’équilibre thermodynamique, et si on suppose que l’atmosphère est constituée de couches parallèles, on exprime la température de brillance mesurée à l’angle θ et à la fréquence ν avec l’équation du transfert radiatif suivante :
↑ ↓
+
Γ
−
+
Γ
=
T
T
T
TB
(
θ
,
ν
)
ε
0 0(
1
ε
0)
∫
∞ − ↓ ∫=
0 ' ) ' , ()
(
)
,
(
)
,
(
z
e
0T
z
dz
T
z dz z ν αν
α
ν
θ
∫
∞ − ↑ ∫ ∞=
0 ' ) ' , ()
(
)
,
(
)
,
(
z
e
T
z
dz
T
z dz z ν αν
α
ν
θ
) cos( ) , 0 ( θ τ ∞ −=
Γ
e
TB(θ,ν) : température de brillance mesurée à l’angle θ et à la fréquence ν, ε0 : émissivité de la surface de la Terre pour l’angle θ et la fréquence ν,
T0 : température physique de la surface de la Terre,
T(z) : température physique de l’atmosphère à l’altitude z, Г : transmission atmosphérique,
T↓ : rayonnement atmosphérique descendant, T↑ : rayonnement atmosphérique ascendant, α(θ,ν) : coefficient d’absorption du milieu.
Notons que dans les études qui suivent, seules des mesures au nadir sont utilisées : ces équations s’en trouvent simplifiées.
c - L’absorption atmosphérique
Les composants de l’atmosphère (essentiellement azote, oxygène, argon, dioxyde de carbone, vapeur d’eau) interagissent différemment avec le rayonnement électromagnétique selon la fréquence. Un même composant apparaîtra transparent à certaines fréquences s’il ne réagit pas, opaque à d’autres quand il absorbe le rayonnement. La mesure du rayonnement à une fréquence de raie d’absorption d’un composant permet ainsi de restituer la concentration de ce composant.
La figure 9 présente la transmission atmosphérique totale dans la gamme des hyperfréquences, à la verticale. On distingue plusieurs raies d’absorption : à 22.235 et 183.31 GHz, l’absorption est due à la vapeur d’eau. Ce sont ces fréquences qui sont généralement utilisées pour restituer la vapeur d’eau (le contenu intégré à 22 GHz, le profil atmosphérique à 183 GHz). A 50-60 et 118 GHz l’absorption est due à l’oxygène, on utilise ces fréquences pour restituer des profils de température atmosphériques car la concentration en oxygène dans les premières couches de l’atmosphère est stable et bien connue : ainsi, dans l’équation de transfert radiatif ci-dessus, α est connu et on a accès à T(z). En dehors des raies d’absorption se situent les canaux fenêtres, pour lesquels l’atmosphère est presque transparente. Le signal reçu provient donc principalement de la surface ou des basses couches de l’atmosphère.
2 - La restitution de la correction troposphérique humide (dh)
a - La dh
Pour restituer la correction troposphérique humide, il faut donc une température de brillance mesurée à une fréquence sensible au contenu intégré en vapeur d’eau, mais pas uniquement, car on ne pourrait pas, avec un seul canal, séparer les contributions de la surface et de l’atmosphère (il faut, a priori, autant de sources d’information que de paramètres à connaître). Parmi les fréquences du TMR (18, 21, 37 GHz) ou du JMR ou du AMR (18.7, 23.8, 34 GHz), la première est sensible à la rugosité de la surface, la deuxième à la quantité intégrée de vapeur d’eau, et la troisième à l’eau liquide nuageuse. Pour les radiomètres bi-fréquences tels que ceux de ERS1, ERS2, ENVISAT (23.8 et 36.5 GHz), on utilise une information supplémentaire sur la surface qui est soit le coefficient de rétrodiffusion de l’altimètre pour ENVISAT (Obligis and Eymard, 2006), soit le vent déduit de ce coefficient pour ERS 1 et 2 (Eymard et al, 1996).
On peut noter que les radiomètres ne mesurent pas les radiations directement à 22.235 GHz, au centre de la raie d’absorption, mais légèrement à côté (21 ou 23.8 GHz). Ceci est dû au fait que la mesure à exactement 22.235 GHz dépend fortement de la distribution verticale de pression, température et vapeur d’eau, tandis qu’en comparaison, les mesures à 21 ou 23.8 GHz sont assez insensibles aux distributions verticales (Fu et Cazenave, 2001).
b - Les méthodes de restitution
Les algorithmes actuels de restitution de la correction troposphérique humide sur océan sont formulés en utilisant des méthodes statistiques : une base de données, contenant des corrections troposphériques humides et les températures de brillance simulées correspondantes est constituée, et les algorithmes de restitution sont formulés par régression sur cette base.
Les différences d’approche entre les missions NASA/CNES et les missions ESA résident à la fois dans le contenu de la base d’apprentissage et dans la méthode de régression.
Côté ESA (mission ENVISAT, ERS), la base d’apprentissage est constituée de plusieurs analyses globales ECMWF extraites pour différentes saisons, et les températures de brillance sont simulées pour chaque maille de ces analyses. L’algorithme de restitution est formulé par régression sur cette base d’apprentissage (Eymard, 1996, Obligis, 2006).
Côté américain (missions TOPEX, JASON), la base d’apprentissage est constituée de profils atmosphériques réels mesurés par des radiosondages et les températures de brillance sont simulées sur ces profils.
Cependant, la distribution de ces mesures in situ à la fois dans le temps et l’espace n’est pas suffisante, et toutes les situations atmosphériques ne peuvent pas être représentées de manière satisfaisante. Une base d’apprentissage contenant des analyses météorologiques globales présente l’avantage de couvrir toutes les situations atmosphériques possibles. Les erreurs connues de localisation et datation des différents phénomènes météorologiques dans le modèle sont sans impact sur la fonction de transfert obtenue.
En ce qui concerne les méthodes de restitution, côté américain l’algorithme est formulé par régression paramétrique log-linéaire sur cette base d’apprentissage :
∑
=−
+
=
37 , 21 , 18 0ln(
280
)
i i iTB
B
B
dh
Dans cette équation, la dh est en centimètres. Les coefficients Bi sont tabulés en vent et en
classe de dh (0-10, 10-20, 20-30, >30 cm). La classe à laquelle la dh appartient est déterminée par le calcul d’une première estimation, avec un autre jeu de coefficient. Pour plus de détails sur l’algorithme de restitution, on pourra consulter (Keihm et al, 1995, Brown, 2004).
Après avoir formulé les algorithmes de restitution pour les missions ERS également par régression paramétrique, il a été choisi d’utiliser pour la mission Envisat une régression neuronale, qui a permis de réduire de façon significative les erreurs, notamment celles liées à la non linéarité de certains phénomènes atmosphériques. Des études réalisées pour la correction troposphérique humide montrent que, pour une base donnée, l’inversion est mieux réalisée (en terme de biais, d’écart-type, et de distribution géographique) avec un algorithme neuronal qu’avec un algorithme paramétrique (Obligis et al, 2006).
Un autre avantage important de la méthode neuronale est de pouvoir considérer de nouvelles variables explicatives (en entrées du réseau) sans avoir à définir préalablement la fonctionnelle à utiliser pour les introduire de manière optimale.
III - La correction troposphérique humide près des côtes
Si le couple altimètre/radiomètre donne des résultats satisfaisants en plein océan, ce n’est pas le cas dans les zones côtières. La moindre présence de terre émergée dans le champ de vue du radiomètre a une très forte influence sur la mesure (les températures de brillance augmentent fortement), et cette influence s’exerce jusqu’à des points assez éloignés de la côte (50-60 km) à cause de la largeur de ce champ de vue. Les algorithmes actuels de restitution de la correction troposphérique humide ne savent pas correctement gérer cette augmentation.
1 - L’effet de la Terre sur la mesure du radiomètre
La forte influence de la présence de terre dans la tache au sol du radiomètre est due à l’émissivité des surfaces terrestres. Pour une fréquence et un angle d’observation donné, l’émissivité de la surface terrestre est fonction de la rugosité, de l’humidité du sol, donc du type de sol, de la couverture végétale… Elle est fortement variable dans le temps et dans l’espace. L’émissivité de la surface océanique, quant à elle, est fonction de la température, de la salinité, et de la rugosité de la surface (donc du vent de surface), paramètres qui varient peu en comparaison. Elle se situe autour de 0.5, alors que l’émissivité des surfaces terrestres est en général supérieure à 0.8.
On peut faire un rapide calcul : si on néglige l’effet de l’atmosphère, la température de brillance mesurée est le produit de la température physique par l’émissivité. Pour une mer et une terre à 27 °C ≈ 300 K, la TB mesurée passera de 150 à près de 300 K.
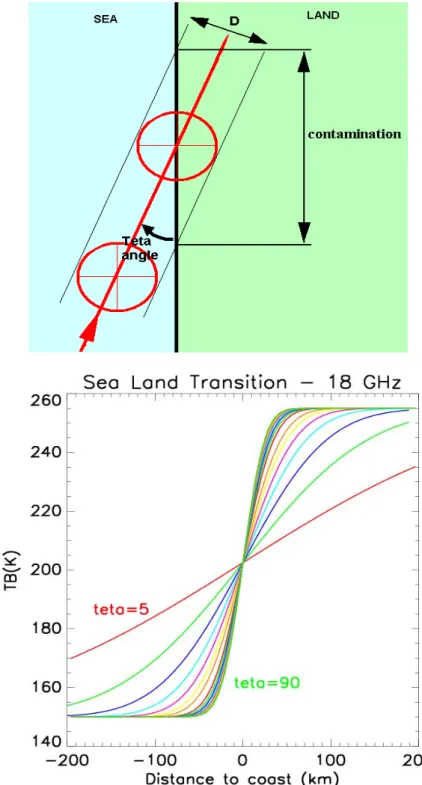
2 - De l’antenne du radiomètre et sa tache au sol…
La tache au sol du radiomètre, aussi appelée empreinte, n’est pas ponctuelle. Une antenne possède un lobe principal, zone dans laquelle la majeure partie du signal est reçue, puis des lobes secondaires et arrières. Voici le diagramme théorique d’une antenne (figure 10), suivi de la représentation graphique du lobe d’antenne réel du TMR et d’une coupe diamétrale du lobe réel (figure 11).
Figure 10 : représentation polaire du diagramme d’une antenne micro-ondes (tiré de Ulaby)
Figure 11 : représentation du lobe d’antenne réel du TMR à 18 GHz
La dimension de la tache au sol du radiomètre est liée à la fois à ce diagramme d’antenne (instantané), et au temps d’intégration du radiomètre. On suppose ici que la distance parcourue pendant ce temps d’intégration correspond à la largeur de la tâche au sol. Par la suite on utilise donc le diagramme instantané pour décrire la taille du pixel.
On utilise souvent la largeur « à mi-hauteur » (ou à -3 dB), qui est la largeur mesurée lorsque l’intensité est la moitié de l’intensité maximale. Cette dimension dépend de la fréquence et de la hauteur du satellite. Voici le diamètre au sol du lobe d’antenne à -3 dB pour le TMR :
Fréquence (GHz) Diamètre (km)
18 44.6
21 37.4
37 23.5
3 - … à la mesure
On comprend donc le passage progressif d’une TB océanique à une TB terrestre sur le graphique suivant (Fig. 13), qui montre, le long d’une trace du satellite TOPEX/Poseidon (présentée Fig. 12), la TB 21 GHz mesurée par le radiomètre. A proximité d’une côte, on a dans la tache au sol (aussi appelée pixel) aussi bien de la mer que de la terre : on parle de pixel mixte.
Figure 12 : trace TOPEX n° 187. Les zones pointillées indiquent les régions de pixels mixtes.
Figure 13 : TBs mesurées le long de la trace par le TMR (16 mars 1998 vers midi). Le masque terre/mer indique si le centre du pixel est sur terre ou sur mer.
On remarque bien le passage Terre-Mer de la côte algérienne à la mer, le passage au-dessus de l’île d’Ibiza (premier pic), le passage à proximité du Cap de Creus (deuxième pic, comme l’indique le masque le centre de la tache au sol ne passe pas sur terre), puis le passage sur la côte française près des Saintes-Maries de la Mer.
Sur le graphique de la figure 14 (zoom sur la transition Mer-Terre vers 43°N de longitude), on voit nettement que l’influence de la terre (ou de la mer si on se place du point de vue de la terre) a un effet à partir de 50 km de la côte.
Figure 14 : zoom de la fig. 13 sur la seconde transition Mer-Terre (côte européenne), en fonction de la distance à la côte.
4 - La « contamination » de la mesure
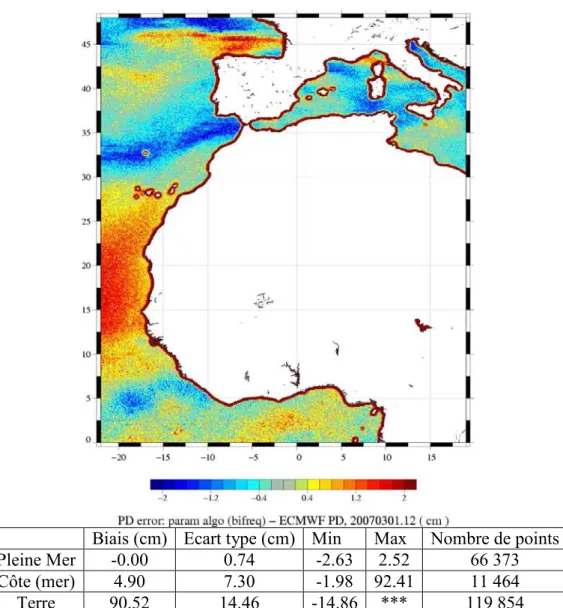
Mais le but premier de l’altimétrie radar est de mesurer la hauteur des océans : de ce point de vue, le radiomètre, près des côtes, est « ébloui ». Les algorithmes de restitution de la correction troposphérique humide sont conçus pour fonctionner uniquement sur océan, car les modèles utilisés pour simuler les TBs des bases d’apprentissage utilisent des modèles d’émissivité de surface océaniques (voir la partie concernant le radiomètre micro-ondes et les méthodes de restitution). Et en effet, on constate que près des côtes, les performances des algorithmes de restitution se dégradent fortement : c’est pour cette raison que l’on parle de « contamination par la terre ». La figure 15 (courbe noire) montre la différence entre la correction troposphérique humide du JMR et celle du modèle ECMWF. La correction JMR est contaminée près des côtes, tandis que la correction du modèle n’a pas de raison de l’être : c’est donc bien la contamination que l’on observe ici.
Figure 15 : comparaison entre la correction troposphérique humide du JMR et du modèle ECMWF, en fonction de la distance à la côte. Moyenne sur une période de 1 an (cycles 136 à 170). La courbe en noir montre la moyenne, la courbe en pointillés l’écart-type, la courbe en rouge la répartition du nombre de
mesures (Ablain, 2006).
La conséquence directe est que les mesures altimétriques à moins de 50 km des côtes sont étiquetées comme « non valides ».
Seulement voilà, de plus en plus de scientifiques ou d’utilisateurs expriment le besoin d’une mesure altimétrique précise près des côtes, comme nous allons le voir dans le paragraphe suivant.
IV - Les enjeux de l’altimétrie côtière
Nous avons vu que la mesure altimétrique près des côtes ne peut plus être corrigée assez précisément, n’ayant pas accès dans ces zones à une correction troposphérique humide précise. Les données altimétriques finales, destinées aux utilisateurs, y sont étiquetées comme « non valides », en grande majorité à cause du critère de distance à la côte, alors que la mesure altimétrique, elle, est valide jusqu’à environ 10 km de la côte.
Sur la figure 16 sont représentés, en bleu, les points sous la trace satellite qui sont à plus de 50 km d’une côte, pour la Méditerranée. On voit que de larges zones sont inaccessibles à une donnée altimétrique finale précise : toute la mer Egée, une partie de l’Adriatique, l’est de la Mer Tyrrhénienne, l’ouest de la mer d’Alboran. On s’aperçoit donc de la quantité de données supplémentaires que représenterait une amélioration de la correction troposphérique près des côtes.
Figure 16 : Couverture de TOPEX/Poseidon : les points en bleu sont à plus de 50 km des côtes (Mercier, 2004)
De nombreuses applications tireront grand profit de l’amélioration de la précision des mesures (Mercier, 2001) :
• Amélioration des modèles de marée : la précision des modèles est actuellement centimétrique en plein océan mais seulement de 5 à 10 cm en côtier.
• Lien avec les marégraphes : avant l’apparition des satellites altimétriques, le suivi du niveau moyen était réalisé à l’aide des marégraphes, donc uniquement près des côtes. Ils sont toujours utilisés actuellement, notamment pour valider les mesures altimétriques. Le manque de précision en côtier rend difficile cette comparaison.
• Rattachement des géoïdes terrestres et océaniques : une mesure altimétrique précise près des côtes serait une aide précieuse à la connaissance du géoïde dans ces zones et donc à la restitution précise des orbites des satellites.
• Modèles météorologiques ou modèles de circulation océanique : de nombreux modèles, parfois régionaux, assimilent les données altimétriques.
• Prévision opérationnelle.
Et par conséquent : suivi des nappes de pollution, surveillance de la pêche intensive, suivi de l’océan, des lacs et des fleuves, qui sont les témoins de l’évolution du climat.
Signalons également qu’une forte demande est faite du côté de l’hydrologie continentale : suivi du niveau des lacs, des fleuves, observation des grands bassins continentaux.
L’amélioration de la précision de la mesure altimétrique en général, et en particulier de la correction troposphérique humide en côtier, bénéficiera à toutes ces applications.
Partie 2 : Evaluation des méthodes existantes, développement du
simulateur.
I - Introduction
1 - Présentation des données et des simulations utilisées 2 - Le choix de la construction d’un simulateur de radiomètre 3 - Le problème inverse
II - Le simulateur de radiomètre 1 - Zone et jours d’étude
2 - Le développement du simulateur
a - Première étape : le modèle de transfert radiatif
b - Deuxième étape : utilisation d’une carte d’émissivité terrestre c - Troisième étape : prise en compte du lobe d’antenne
3 - Un algorithme de restitution adapté à nos simulations III - Evaluation des méthodes actuelles
1 - Sans traitement particulier des côtes
2 - Utilisation de la dh ECMWF (European Center for Medium-range Weather Forecast)
3 - Propagation de la dernière dh non contaminée 4 - Utilisation de la dynamique du modèle ECMWF 5 - Récapitulatif
I - Introduction
Pour résoudre le problème de la correction troposphérique humide près des côtes, différentes méthodes ont été proposées jusqu’alors. Citons par exemple la méthode consistant à utiliser la valeur fournie par un modèle météorologique (type ECMWF), ou celle qui choisit de propager jusqu’à la côte la valeur « pleine mer » (donc non contaminée) la plus proche, ou encore la même propagation mais en imposant la dynamique d’un modèle météorologique (Mercier, 2004). C. Ruf a proposé en 1999 une méthode de correction analytique et théorique des températures de brillance avant restitution. Cette méthode utilisait comme hypothèses contraignantes une côte rectiligne et une trace satellite perpendiculaire à la côte, mais consistait en un premier pas vers le développement d’une méthode analytique, et vers la quantification de la contamination des températures de brillance par la terre (Ruf, 1999). Citons enfin R. Bennartz qui traite le problème des pixels mixtes (mélange de terre et de mer) dans les mesures SSM/I en utilisant la fraction de surface de mer dans chaque pixel (Bennartz, 1999).
L’objectif de cette partie est d’évaluer les performances de ces différentes méthodes, qui visent à minimiser l’erreur sur la correction troposphérique humide près des côtes. Nous les testons sur des mesures radiométriques, en prenant comme référence un modèle météorologique.
Note : cette partie et la suivante sont basées sur (Desportes et al, 2007), inséré en annexe.
1 - Présentation des données et des simulations utilisées
Les mesures radiométriques utilisées dans cette étude sont celles du TMR, il va de soi cependant que les méthodologies proposées sont transposables à n’importe quel autre instrument.
Le modèle ALADIN (Aire Limitée Adaptation dynamique Développement InterNational, voir par exemple (ALADIN International Team, 1997)) est un modèle opérationnel régional de prévision de Météo France. Il fournit des analyses toutes les 6 heures et des prévisions toutes les 3 heures après les analyses. Les champs de surface tels que pression, vent (figure 17), température, ainsi que les profils de température et d’humidité sur 15 niveaux de pression sont disponibles à une résolution de 0.1°.
Figure 17 : Vent de surface du modèle ALADIN, le 16 mars 1998 à midi (m/s).
L’expérience FETCH (« flux, état de la mer et télédétection en conditions de fetch variable ») est une campagne de mesures qui s’est déroulée du 13 mars au 15 avril 1998 dans le golfe du Lion en Méditerranée, région dominée par des vents fréquents comme le Mistral et la Tramontane. De nombreuses mesures ont été faites, à bord de l’Atalante, navire de recherche : radiosondages, radiomètres visant au zénith (s’affranchissant ainsi de la contribution de la surface), mesures bateau. Pour plus de détails sur cette campagne, on pourra consulter (Hauser et al, 2003).
2 - Le choix de la construction d’un simulateur de radiomètre
Au terme de cette campagne, les champs ALADIN correspondant ont fait l’objet d’une évaluation, détaillée dans (Eymard et al, 2003). Il a été montré notamment que le modèle sous-estime systématiquement l’humidité atmosphérique, en particulier dans les cas de Mistral (cas secs). Pour la période FETCH, on observe 2 cm de biais et 1 cm d’écart-type entre la dh du TMR et la dh ALADIN. Du côté des températures de brillance, on observe un biais de 5 K et un écart-type de 2 K entre les mesures du TMR et les TBs simulées à partir des champs ALADIN. Malgré tout, c’est quand même ce qu’on a de mieux en terme de précision et de résolution dans cette zone.
Pour pouvoir évaluer correctement les méthodes de correction appliquées à n’importe quelle configuration géographiques, nous ne pouvions pas étudier uniquement quelques traces
isolées et spécifiques. Le nombre de coïncidences entre les simulations et les passages du satellite est limité et ne permet pas de généraliser les résultats. C’est pourquoi nous avons choisi de simuler le comportement du radiomètre, à partir de champs météorologiques ALADIN et des caractéristiques du radiomètre, afin de caractériser la contamination des TBs par la terre à l’approche des côtes. C’est donc le modèle Aladin pendant FETCH qui a servi à valider ce simulateur.
3 - Le problème inverse
Le grand avantage de travailler sur des simulations est de connaître à l’avance la solution ! A partir d’une réalité que nous choisissons (ici, des analyses météorologiques), nous simulons des mesures. La question qui nous intéresse est appelée « problème inverse » : comment, à partir des mesures, retrouver les analyses de départ ?
Dans un premier temps, nous détaillons le développement du simulateur et sa validation. Nous l’utilisons ensuite pour évaluer les méthodes actuelles de correction troposphérique près des côtes.
II - Le simulateur de radiomètre
1 - Zone et jours d’étude
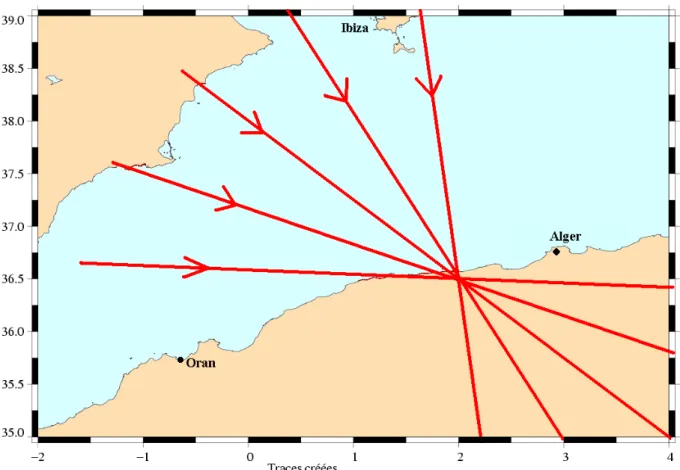
La trace choisie pour évaluer cette simulation est la trace TOPEX n°187, présentée dans la figure 12 (partie 1, §III.3), qui présente de nombreux cas intéressants de contamination qui pourront être rencontrés sur la planète : un passage net Mer-Terre et un passage Terre-Mer, un passage sur un île, un passage tangent à une côte. Pour la commodité de la lecture nous recopions ici cette figure :
Figure 18 : trace TOPEX numéro 187 – les zones pointillées indiquent les régions de pixels mixtes.
Deux jours ont été choisis pour évaluer la simulation : le 16 mars 1998, cas de fort vent sec (Mistral), et le 15 avril 1998, jour où l’atmosphère fut particulièrement humide.
2 - Le développement du simulateur
a - Première étape : le modèle de transfert radiatif
Pour chaque point de la grille au dixième de degré, un modèle simule les 3 températures de brillance TMR à partir des sorties ALADIN (nous les appelons par la suite les TBs ALADIN). Ce modèle a été développé par Prigent (Prigent and Abba, 1990) et amélioré par Guillou (Guillou et al, 1998). Il prend en compte tous les paramètres de surface et les profils atmosphériques pour calculer les TBs émergeant au sommet de l’atmosphère, à une fréquence donnée et pour un angle d’incidence donné. Le modèle de Liebe est utilisé pour l’absorption atmosphérique (Liebe et al, 1993), l’émissivité de surface est calculée avec la théorie de l’optique géométrique (distribution de facettes de Cox and Munk, 1956) et le modèle d’Ellison pour la constante diélectrique de l’eau de mer (Ellison et al, 2003). Il est donc valide uniquement sur des surfaces océaniques homogènes et pour des fréquences supérieures à 3 GHz.
Sur la figure 19, on représente les simulations à 21 GHz, le long de la trace (pour plus de lisibilité), comparées aux mesures du TMR dans le cas du 16 mars.
Les mesures du TMR que nous montrons on été préalablement ajustées aux TBs ALADIN (on a vu dans l’introduction de cette partie que le modèle a tendance à sous-estimer l’humidité atmosphérique), au moyen d’une relation linéaire obtenue, en plein océan (à plus de 50 km des côtes), avec toutes les TBs ALADIN d’une part et toutes les mesures coïncidentes d’autre part. En représentant les unes en fonction des autres, on obtient par régression linéaire une fonction affine qui permet d’ajuster les mesures du TMR au modèle.
On voit sur la figure 19 qu’en plein océan, les simulations correspondent aux mesures. Par contre, près des côtes et sur terre, le signal dû à la terre n’est pas du tout simulé.
Figure 19 : TBs 21 GHz simulées (modèle de transfert radiatif original) et mesurées.
b - Deuxième étape : utilisation d’une carte d’émissivité terrestre
Le modèle original suppose une surface océanique, et donc une émissivité d’environ 0.5, et une rugosité qui est fonction du vent de surface. Nous modifions le modèle pour prendre en compte l’émissivité des surfaces terrestres.
Il n’y a pas actuellement, à notre connaissance, de modèle qui simule correctement l’émissivité des terres en global, car elle dépend fortement du type de sol, de l’humidité et de la végétation et donc de la saison. Des études récentes conduites par F. Karbou (Karbou et al, 2005a) ont montré la possibilité d’une estimation de l’émissivité des terres en fonction du type de sol, de la fréquence, et de l’angle d’incidence, ouvrant ainsi la voie à l’exploitation des mesures radiométriques au-dessus des terres. En inversant des mesures AMSU-A (Advanced Microwave Souding Unit), elle obtient notamment des cartes moyennes mensuelles d’émissivité, aux fréquences 23.8, 31.4, 50.3 GHz, avec une précision de l’ordre de 2 %. Nous utilisons donc les émissivités obtenues à 23.8 GHz au nadir pour l’an 2000 (représentées sur la figure 20), suivant la propriété démontrée dans l’article que la variation des émissivité avec la fréquence est négligeable dans cette gamme de fréquences, et en supposant également que l’émissivité de mars 1998 est similaire à celle de mars 2000. Les atlas fournis ont une résolution de 0.25° que nous augmentons à 0.1° par interpolation bilinéaire. Les zones incomplètes de la carte (par exemple les îles) sont comblées avec l’émissivité moyenne de la zone (0.93).
Figure 20 : carte d’émissivité moyenne pour le mois de mars 2000 (Karbou).
La figure 21 montre la comparaison entre mesures et simulations à ce stade du développement. On peut remarquer que le passage à proximité du Cap de Creus n’est pas du tout simulé, et que les transitions sont brusques, immédiates. Ceci est dû au fait qu’on a supposé que le champ de vue était ponctuel, ce qu’il n’est pas.
c - Troisième étape : prise en compte du lobe d’antenne
Pour chaque point étudié, nous devons tenir compte également de tous les points qui l’entourent, qui sont eux aussi vus par le radiomètre.
La forme du lobe principal de l’antenne est correctement simulée par une gaussienne. On montre sur la figure 22 les lobes d’antenne réels du TMR comparés à des gaussiennes centrées et à des gaussiennes ajustées (par translation et homothétie). Une étude comparant l’utilisation de la gaussienne et de la gaussienne ajustée a montré un faible impact sur les résultats. Par contre, l’absence de symétrie cylindrique par rapport au nadir complexifie grandement les traitements géométriques et l’implémentation et multiplie au moins par trois les temps de calcul. Par la suite, nous avons utilisé la gaussienne centrée.
Figure 22 : lobes d’antenne réels du TMR comparés à des gaussiennes (à 18 GHz, les gaussiennes simples et ajustées sont superposées).
Nous simulerons donc les lobes d’antenne par des gaussiennes, de déviation standard σ fonction du diamètre D du lobe à 3 dB :
σ
= D²/8ln(2).Pour chaque point de la grille, nous calculons une moyenne de tous les points environnants présents dans la tache au sol, pondérée par la valeur de la gaussienne correspondante.
Dans la pratique, les mesures du TMR sont moyennées le long de la trace pour réduire l’erreur causée par les différences de largeur de faisceau (Janssen et al, 1995). Nous appliquons le même traitement aux simulations. La figure 23 montre, pour les 3 fréquences du TMR, les simulations comparées aux mesures.
(a)
(b)
(c)
Tous les types de signaux sont correctement simulés : transition progressive de la terre à la mer ou de la mer à la terre, signal lisse au-dessus de l’île. On note également le rôle de la largeur du lobe quand le satellite survole l’île (le signal est plus fort si la fréquence est plus élevée) ou quand la trace est tangente à la côte (il y a plus de contamination à basse fréquence car le pixel est plus large).
Les simulations semblent néanmoins surestimées au-dessus d’Ibiza et sous-estimées près du Cap de Creus. Ceci peut être dû à une mauvaise estimation de l’émissivité (une erreur de 5 % sur l’émissivité correspond à environ 15 K d’erreur sur la TB, en supposant une température de surface de 285 K), et/ou à une erreur sur la température de surface, deux paramètres que le relief rend impossibles à déterminer de manière satisfaisante.
Les résultats dans le cas du 15 avril sont similaires et satisfaisants également, comme le montrent les trois graphiques de la figure 25 (page suivante).
Ainsi, nous avons construit un simulateur de radiomètre, qui a été validé dans deux situations atmosphériques différentes et pour diverses configurations géographiques. Le simulateur fournit des cartes de TBs telles qu’elles auraient été mesurées par un radiomètre s’il pouvait être partout à la fois au même instant. Un exemple de carte est montré figure 24 : on remarque bien la contamination à l’approche des côtes.
Figure 24 : TBs à 21 GHz du simulateur, 16 mars vers midi. Les terres ne sont pas représentées mais les simulations y sont faites également.
(a)
(b)
(c)
3 - Un algorithme de restitution adapté à nos simulations
A cause des différences entre TBs simulées et mesurées (qui ont été corrigées dans les figures ci-dessus), l’algorithme opérationnel standard de restitution du TMR (Keihm et al, 1995, Brown, 2004) ne pouvait pas être utilisé sur les TBs simulées : il aurait fallu corriger un biais partout. Pour cette raison, nous avons construit un nouvel algorithme optimisé pour notre zone d’étude et pour les caractéristiques du modèle ALADIN. Avec tous les champs ALADIN disponibles pendant la période FETCH, nous avons simulé les trois températures de brillance, uniquement en pleine mer. Ensuite, par une régression log-linéaire nous avons obtenu la meilleure relation entre la dh et les trois TBs correspondant à notre base de données. Nous avons obtenu les coefficients suivants :
∑
=−
+
=
37 , 21 , 18 0ln(
280
)
i i iTB
B
B
dh
B0 = 187.051 B18 = 34.6150 B21 = -71.0399 B37 = -0.81085Nous pouvons maintenant utiliser cet algorithme pour restituer la correction troposphérique humide à partir des TBs simulées. Comme l’algorithme a été développé avec des simulations de pleine mer, sans aucun traitement spécifique près des côtes les dh restituées sont contaminées, tout comme les TBs.
III - Evaluation des méthodes actuelles
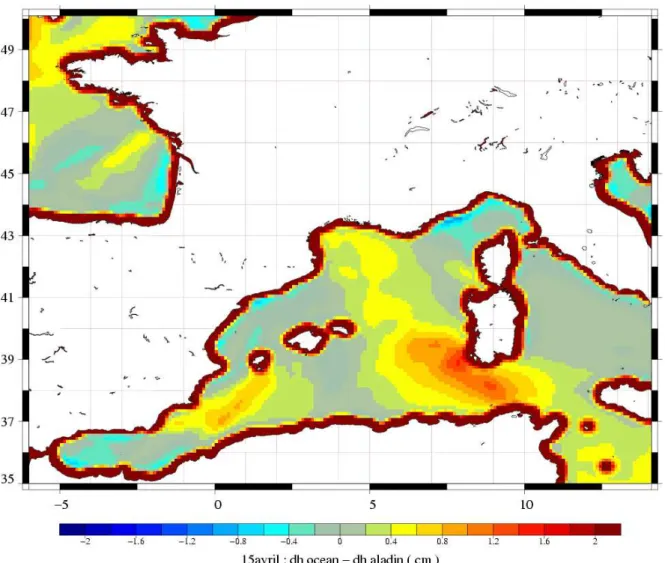
Dans ce paragraphe, nous cherchons à évaluer quelques méthodes actuelles de correction troposphérique près des côtes. Ces méthodes sont des post-traitements : elles consistent à corriger la dh finale. Pour cela, nous prenons comme référence la dh ALADIN (figure 26), à laquelle nous comparons les dh obtenues avec les différentes méthodes. Les résultats sont présentés sous forme de cartes d’erreur : nous traçons la différence entre la dh obtenue à partir des TBs du simulateur, après d’éventuels traitements (et que l’on appellera par la suite la dh simulée), et la dh ALADIN. Un tableau récapitulatif donne la moyenne et l’écart-type des erreurs, dans la bande côtière, pour chaque méthode testée.
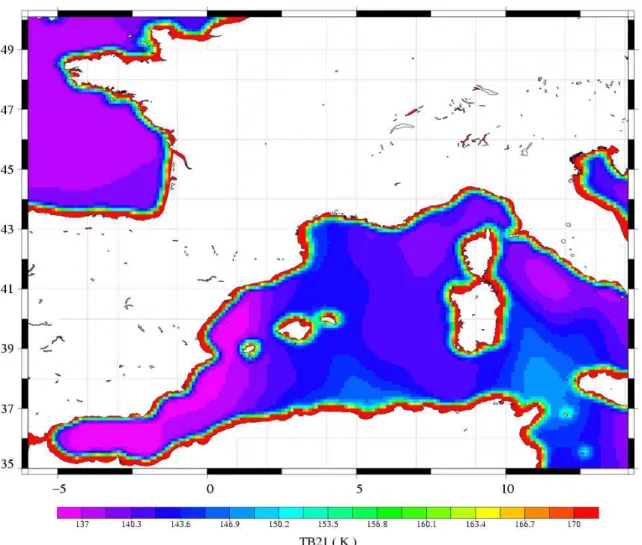
1 - Sans traitement particulier des côtes
La figure 27 montre l’erreur obtenue si on n’applique aucune correction particulière, pour le cas du 15 avril. On applique le même algorithme océanique à tous les points de la carte. On observe facilement la contamination près des côtes, due à l’incapacité de l’algorithme à gérer la forte hausse des TBs.
Les erreurs visibles en plein océan sont, quant à elles, inhérentes à l’algorithme de restitution. Elles sont dues au manque de précision de l’algorithme dans des situations éloignées de la situation moyenne (c’est le cas de tous les algorithmes statistiques paramétriques). Pour les points situés loin des côtes, ces erreurs ont une moyenne de 0.26 cm et un écart type de 0.28 cm. La moyenne indique que l’erreur a tendance à être plus positive, ce qui est dû au signal au sud de la Sardaigne. L’écart type de 0.28 cm donne un minorant de l’erreur possible, l’erreur résiduelle, que nous voudrions atteindre près des côtes.
Figure 27 : différence entre la dh ALADIN et la dh obtenue à partir des TBs du simulateur (15 avril), sans correction de la contamination.