NOTE TO USERS
This reproduction is the best copy available.
UNIVERSITE DE
SHERBROOKE
Faculte de genie
Departement de genie mecanique
DEVELOPPEMENT ET CONTROLE D'UN BRAS ROBOTIQUE BASE SUR
L'ACTIONNEUR DIFFERENTIEL ELASTIQUE
Memoire de maitrise es sciences appliquees
Specialite : genie mecanique
Presente a:
Michel Lauria
Fran9ois Michaud
Patrice Masson
Marc-Andre LAVOIE
1*1
Library and Archives Canada Published Heritage Branch 395 Wellington Street Ottawa ON MAOISM Canada Bibliotheque et Archives Canada Direction du Patrimoine de I'edition 395, rue Wellington OttawaONK1A0N4 CanadaYour file Votre r6f6rence ISBN: 978-0-494-53404-5 Our file Notre reference ISBN: 978-0-494-53404-5
NOTICE:
The author has granted a
non-exclusive license allowing Library and Archives Canada to reproduce, publish, archive, preserve, conserve, communicate to the public by
telecommunication or on the Internet, loan, distribute and sell theses
worldwide, for commercial or non-commercial purposes, in microform, paper, electronic and/or any other formats.
The author retains copyright ownership and moral rights in this thesis. Neither the thesis nor substantial extracts from it may be printed or otherwise reproduced without the author's permission.
AVIS:
L'auteur a accorde une licence non exclusive permettant a la Bibliotheque et Archives Canada de reproduire, publier, archiver, sauvegarder, conserver, transmettre au public par telecommunication ou par I'lnternet, preter, distribuer et vendre des theses partout dans le monde, a des fins commerciales ou autres, sur support microforme, papier, electronique et/ou autres formats.
L'auteur conserve la propriete du droit d'auteur et des droits moraux qui protege cette these. Ni la these ni des extraits substantias de celle-ci ne doivent etre imprimes ou autrement
reproduits sans son autorisation.
In compliance with the Canadian Privacy Act some supporting forms may have been removed from this thesis.
While these forms may be included in the document page count, their removal does not represent any loss of content from the thesis.
Conformement a la loi canadienne sur la protection de la vie privee, quelques
formulaires secondaires ont ete enleves de cette these.
Bien que ces formulaires aient inclus dans la pagination, il n'y aura aucun contenu manquant.
1*1
RESUME
Les forces et faiblesses des robots different grandement de celles des humains, les robots chirurgicaux ont plusieurs avantages qui expliquent leur utilisation croissante en salle d'operation. Cependant, la robotique chirurgicale demeure un domaine qui comporte de nombreux defis. Plutot que de travailler directement au niveau de I'application sur un robot specifique, il a ete decide de concentrer les efforts sur une des composantes mecaniques qui impose des limitations aux interactions humain-robot: I'actionneur. Dans cette optique, un prototype de bras interactif a ete realise en utilisant la technologie de I'Actionneur Differentiel Elastique (ADE), un actionneur elastique haute-performance de faible impedance mecanique intrinseque. Le bras a trois degres de liberie, dont les actionneurs sont controles en impedance, pourra servir a etudier la facon dont les interactions humain/robot permettent d'augmenter les capacites humaines de manipulation.
Le controle d'impedance de I'ADE a ete utilise en tant que noyau central lors du developpement du controle du bras interactif. L'analyse des performances dans la plage de frequence d'interet suggere un bon comportement de I'actionneur lorsque I'impedance mecanique demandee est faible. Les premiers essais d'interaction humain-robot avec le bras interactif suggerent que I'ADE est tout indique pour une telle application. Le controle d'impedance developpe a pu etre utilise dans le cadre d'une autre application robotique : le controle des axes de direction du robot mobile omnidirectionnel AZIMUT3.
Mots cles: Actionneur Differentiel Elastique (ADE), interaction humain-robot, robotique chirurgicale, controle d'impedance mecanique.
REMERCIEMENTS
Merci a Michel de m'avoir fait confiance, de m'avoir guide et de m'avoir ecoute dans ce parcours. Michel, tes competences techniques legendaires n'ont d'egale que tes qualites de savoir-etre.
Merci aussi aux autres professeurs qui m'ont supporte dans ma maTtrise : Francois Michaud, Francois Cabana, Philippe Jacob-Goudreault, Denis Rancourt, Yann Pasco et Yvan Champoux. Merci au Laboratoire de robotique mobile et de systeme intelligents (LABORIUS) et au Conseil de recherches en sciences naturelles et en genie du Canada (CRSNG) d'avoir cru en moi et supporte mes recherches.
Merci aux gars du labo, vous avez rendu cette aventure tellement plus agreable. Merci Carle et Clement pour nos discussions passionnantes et notre savoureuse rivalite (Carle) ou complicite (Clement) dans les jeux; Merci Fred pour tes histoires sur la patemite et pour m'avoir fait decouvrir I'Ultimate. Merci Phil pour tes idees et tes questions; ta soif d'avancer est contagieuse. Merci Pete pour ton eternel sens de I'humour, ta generosite (et vaillance) et les noms absurdes que tu donnes a tes heros. Merci Isabelle pour ton sourire, ton courage et tes conseils. Merci Serge pour la breve mais pertinente aventure Cashflow et pour avoir toujours ete disponible. Merci MAR de m'avoir presente le CTA et d'avoir veille sur moi en Allemagne, je t'en dois une! Merci Yan pour I'initiation au Texas Hold'em, au monde de la finance, aux regies du bon voisinage et au role d'etre un Papa. Merci Pat pour les fous-rire, les courses endiablees sur des petits Kart, les frustrantes soirees Dota, etc. etc. Merci Dominic pour ton aide et tes conseils. Tu as toujours ete disponible et interesse par mes questions : c'est toi qui m'as donne envie d'etre professionnel de recherche.
Merci Marie, Alex et Jany de m'avoir si souvent prete vos chums lors de mes nombreuses soirees de jeux. Votre generosite nous a permis de conquerir de nombreuses terres hostiles. Merci Maelle d'etre une source intarissable de sourires! Merci Will et Christophe pour les parties de hockey, de lutte, de ballon et de duel a I'epee.
Merci Marc-Antoine d'avoir ete un ami et meme un mentor pendant ces annees. Ton soutien quotidien, ta patience inebranlable et tes methodes exemplaires m'ont motive a poursuivre et
a m'ameliorer. Jamais tu n'auras manque de pistes de solutions ou de projets prometteurs. Puisse I'avenir nous permettre de vivres d'autres aventures en ingenierie, en photographie ou en affaires. Vivement de prochaines rencontres de creativite!
Merci Maman et Papa de m'avoir montre le meilleur, vous m'avez toujours encourage a me depasser dans ce que j'entreprends. Merci Jean-Louis pour tes conseils, ton aide et nos discussions. Merci mes freres pour votre soutien et pour tout le fun qu'on se fait ensemble. Merci de m'endurer, vous etes si agreables (et faciles) a taquiner. Et surtout, merci Marie-Josee de m'avoir accompagne et encourage dans cette aventure. Sans ton appui, rien de tout ceci n'aurait ete possible. Merci Pierre-Alexandre d'etre si adorable. Sans tout comprendre, tu m'as aide a terminer ma redaction.
TABLE DES MATIERES
1. INTRODUCTION 1
2. SYSTEMES D'INTERACTION HUMAIN/ROBOT 5
2.1. Les robots chirurgicaux 5 2.2. Les exosquelettes 12
3. SPECIFICATIONS POUR LA PREUVE DE CONCEPT DU BRAS INTERACTIF 19
4. CONTROLE DE L'ACTIONNEUR DIFFERENTIEL ELASTIQUE 21
4.1. Approches de controle pour les taches d'interaction humain-robot 23
4.2. Controle d'impedance de I'ADE 24 4.3. Moderation du systeme en boucle fermee 30
4.4. Implantation du controle d'impedance 34
5. PERFORMANCES DU CONTROLE 43 5.1. Montage experimental 43 5.2. Protocole experimental 47 5.3. Resultats 48 5.4. Discussion , 56 6. BRAS INTERACTIF 61 6.1. Articulations du bras 61 6.2. Assignation des reperes 62 6.3. Cinematique directe ...63 6.4. Cinematique inverse 64
6.5. Jacobien 64 6.6. Implantation du controle d'admittance dans I'espace des articulations 65
6.7. Resultats 71
CONCLUSION 73
Travaux futurs 73
ANNEXE A - MODELE DE L'ADE 77
ANNEXE C - PROCEDURE D'UTILISATION DE XPC TARGET/RT WORKSHOP 84
ANNEXE D - PROCEDURE DE CONFIGURATION DU PC/104+ POUR XPC TARGET 85
ANNEXE E - SCRIPT MATLAB DEVALUATION DES PERFORMANCES 86
ANNEXE F - CINEMATIQUE DIRECTE 89
ANNEXE G - CINEMATIQUE INVERSE .95
ANNEXE H - CALCUL DU JACOBIEN 96
ANNEXE I - CONTROLE D'IMPEDANCE DANS L'ESPACE CARTESIEN 103
LISTE DES FIGURES
Figure 2.1 Acrobot et diagramme des zones de contraintes (Jakopec et al., 2003) 8
Figure 2.2 Systeme CRIGOS (Brandt et al., 1999) 9 Figure 2.3 Robot PADyC et mecanisme Freewheel (Schneider et al., 2001) 10
Figure 2.4 Robot Steady-Hand et schema de fonctionnerhent (Kumar et al., 2000) 12
Figure 2.5 Exosquelette BLEEX (Zoss et al., 2005) 15 Figure 2.6 Exosquelette LOPES (Veneman et al., 2006) 16 Figure 2.7 Exosquelette HAL (Hayashi et al., 2005) ...17 Figure 2.8 Exosquelette RoboKnee (Pratt et al., 2004) 18 Figure 4.1 Representation schematique du fonctionnement de I'ADE (Legault, 2006) 21
Figure 4.2 Fonction de transfert G0i experimentales pour des courants de 0,5, 1 et 1,5 A
(Legault, 2006) 22 Figure 4.3 Controleur d'impedance base sur la position (angle) 25
Figure 4.4 Controleur d'impedance base sur la force (couple) 25 Figure 4.5 Schema simplifie du controleur d'impedance base sur la position (angle) 28
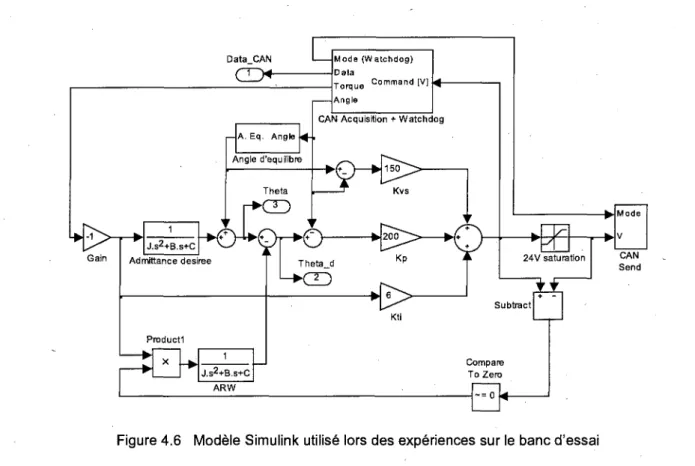
Figure 4.6 Modele Simulink utilise lors des experiences sur le banc d'essai 35
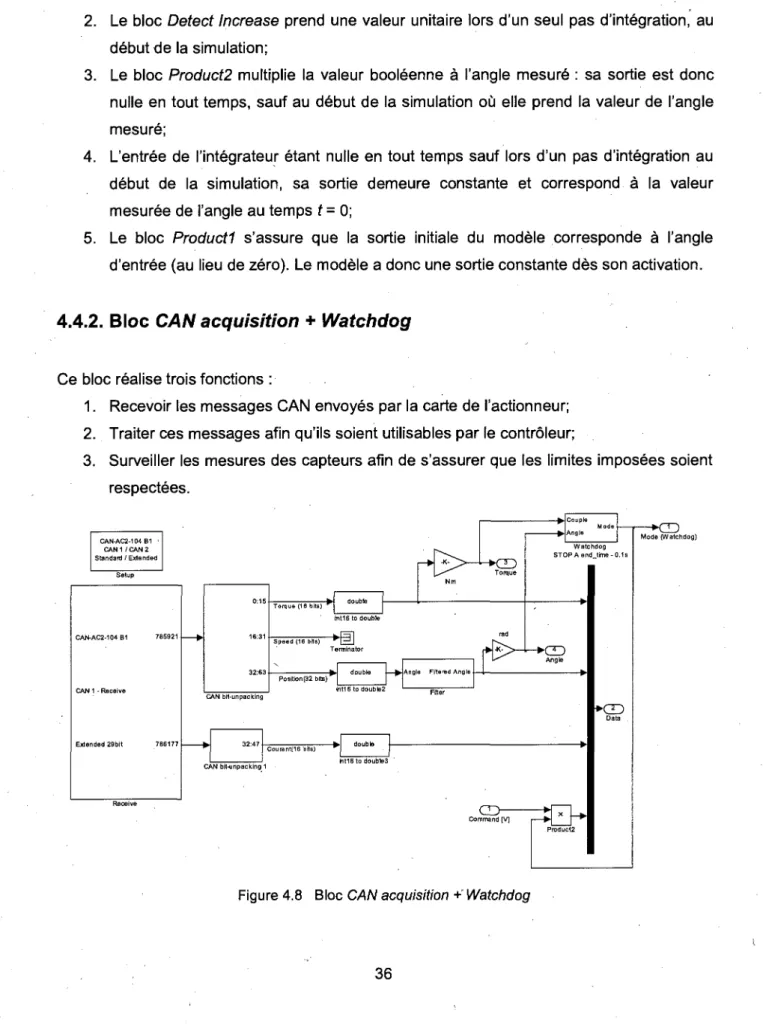
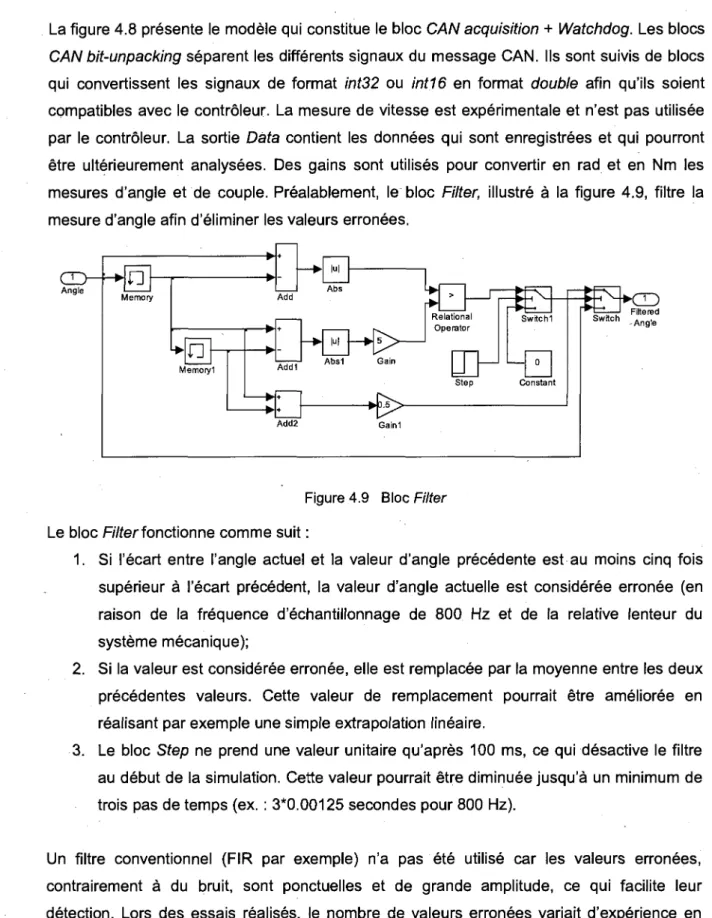
Figure 4.7 Bloc Angle d'equilibre 35 Figure 4.8 Bloc CAN acquisition + Watchdog 36
Figure 4.9 Bloc Filter.... 37 Figure 4.10 Parametres des blocs de communication CAN Setup et Receive 38
Figure 4.11 Bloc Watchdog 39 Figure 4.12 Bloc CAN Send 40 Figure 4.13 Configuration du bloc Send.... 40
Figure 4.14 Composante d'Anti-Reset Windup (ARW). 41
Figure 5.1 COBRA single board computer 43
Figure 5.2 Banc de tests actif 44 Figure 5.3 Carte Diamond-MM-32 45 Figure 5.4 Controle de I'ADE pour le banc de tests 46
Figure 5.5 Configuration des sorties de la carte Diamond 46 Figure 5.6 Modele du bloc Testbed Torque Watchdog ...47
Figure 5.7 Optimisation du gain Kti pour le cas de haute admittance. 50
Figure 5.8 Optimisation du gain K&pourle cas du ressortfaiblement amorti 51
Figure 5.9 Optimisation du gain Kti pour le cas de I'amortisseur 52
Figure 5.10 Optimisation du gain Kvs pour le cas de la basse admittance desiree 53
Figure 5.11 Performances normalisees obtenues pour les quatre differentes admittances. 55
Figure 5.12 Comparaison entre le diagramme de Bode de FJXL et de I'admittance desiree
1/0.4s (boucle fermee) 58 Figure 5.13 Comparaison entre le diagramme de Bode de FRIXL et de I'admittance desiree
-1/0.4s (boucle fermee) 58 Figure 6.1 Articulations du bras interactif ,... 61
Figure 6.2 Reperes du bras interactif 62 Figure 6.3 Controle d'admittance du bras interactif 66
Figure 6.4 Modele du bloc Acquisition_CAN et Setup de la communication CAN 67
Figure 6.5 Bloc CAN Acquisition ADE1 67 Figure 6.6 Modele du bloc Traj generator. 68 Figure 6.7 Modele du bloc Traj generator qui reproduit un deplacement preenregistre 68
Figure 6.8 Modele du bloc Watchdog 68 Figure 6.9 Modele du bloc Gravity compensation & torque deadzones 70
Figure 6.10 Modele du bloc Gravity torque evaluation 71
Figure A.1 Modele de I'ADE 77 Figure 1.1 Modele du controle d'admittance cartesienne 103
Figure 1.2 Modele du bloc Acquisition CAN 104 Figure 1.3 Modele du bloc Direct kinematics & Jacobian 105
Figure 1.4 Modele du bloc Cartesian Admittance 106 Figure I.5 Modele du bloc pos d'equilibre 106 Figure 1.6 Modele du bloc Inverse Kinematics 107 Figure 1.7 Modele du bloc Angle Control 107 Figure 1.8 Modele du bloc Admittance control 8, joint 1 108
LISTE DES TABLEAUX
Tableau 4.1 Simplifications apportees au modele 31 Tableau 6.1 Parametres de la methode Denavit-Hartenberg 63
LEXIQUE
ADE : Actionneur Differential Elastique, un nouveau type d'actionneur haute-performance
developpe au LABORIUS pour des applications d'interaction dynamique. L'ADE bras tenseur est la premiere version d'ADE. II a ete concu pour les bras tenseurs du robot AZIMUTH (Legault, 2006).
ADE Direction : seconde version d'ADE, plus compacte et comprenant un capteur de
position integre. Concu pour les axes de direction du robot AZIMUT2. Le projet concerne cet
actionneur.
Arthroplastie du genou : Total Knee Replacement (TKR), soit la pose d'une prbthese totale
de genou (PTH).
CAN : Controller Area network. Bus de communication permettant a des systemes de
communiquer entre eux sans avoir besoin de lignes dediees ou d'un serveur. Developpe pour le domaine automobile, il est maintenant utilise dans d'autres applications, comme par exemple la robotique.
Diagramme de Bode : representation graphique simple du comportement frequentiel d'un
systeme. II est compose de deux traces, soit le gain (amplitude en dB) et la phase.
DYMOLA: logiciel de modelisation et de simulation multi-domaine base sur le langage
oriente objet libre Modelica. DYMOLA permet aux utilisateurs de creer leurs propres librairies de modeles ou d'utiliser plusieurs librairies qui touchent plusieurs domaines, tels I'automobile, I'aerospatiale, la robotique, les precedes, etc.
Interaction: La definition d'interaction utilisee dans ce memoire est tiree de (Buerger, 2005):
Un robot interagit mecaniquement avec son environnement lorsque la dynamique des systemes couples, soit le robot et I'environnement en contact, differe significativement de la dynamique du robot seul.
Impedance mecanique : concept de I'impedance electrique applique au monde mecanique.
Dans I'analogie courant/vitesse et tension/force, elle peut etre definie comme la resistance d'un systeme mecanique au mouvement. Suivant cette analogie, un ressort equivaut a un condensateur, une inertie a une bobine, et un amortisseur (frottement visqueux lineaire) a une resistance. L'admittance mecanique equivaut a I'inverse de I'impedance mecanique si cette derniere est lineaire et non nulle.
Groupe Orthogenius : groupe de recherche ne d'une collaboration entre des chirurgiens
orthopedique du CHUS et des chercheurs de la faculte de genie de I'Universite de Sherbrooke. Les membres sont: Dr Francois Cabana, B.Sc, M.D., CSPQ; Michel Lauria, Ph.D., Ing. jr.; Yves Berube-Lauziere, Ph.D., Dr Philippe Jacob-Goudreau, R4; Redouane Liamini, B.Sc.A; Marc-Antoine Legault, M.Sc.A, Ing.; Marc-Andre Lavoie, Ing.jr.
Myoelectricite : electricite produite par les contractions musculaires. II est possible de la
mesurer afin de I'utiliser en tant que signal pour des systemes robotises.
PWM : Pulse Width Modulation, soit modulation de largeur d'impulsions (MLI). Un PWM est
une onde carree de frequence constante dont la duree de I'etat haut (par exemple 5 V) par rapport a celle de I'etat bas (0 V) est controlee (rapport cyclique). Cette technique courante permet de generer un signal d'une valeur moyenne variable avec un systeme discret.
Robot chirurgical: Robot implique lors d'une intervention chirurgicale.
Real-time (Temps reel): Un systeme informatique est dit temps reel lorsqu'il est concu pour
respecter les contraintes temporelles. Respecter les echeanciers (delais) imposes devient aussi important que I'exactitude des resultats et permet d'interagir avec des systemes physiques, comme par exemple en robotique, en acquisition de donnees, en procede de production, en aeronautique, etc.
Tomodensitometrie (TDM): aussi appelee TACO ou tomographie axiale commandee par
ordinateur, I'imagerie medicale assistee par ordinateur permet d'etudier des coupes tomographiques qui revelent les differences relatives de densite des divers tissus en fonction des variations d'absorption des rayons X. Des reconstructions en 3D sont possibles
1. INTRODUCTION
Les systemes de sante occidentaux font aujourd'hui face a une pression grandissante causee en partie par le vieillissement de la population et la sedentarite. Les ressources financieres, humaines et techniques sont tour a tour sollicitees par cette croissance de la demande.
Differentes solutions a ce probleme peuvent etre explorees, telle I'education pour vaincre la sedentarite ou une gestion differente des ressources. Les innovations technologiques represented I'une des avenues de solutions etudiees. L'amelioration des instruments chirurgicaux, la conception d'un nouveau lit motorise ou la creation d'un nouvel appareil de diagnostic sont des exemples d'innovations technologiques destinees a ameliorer les soins prodigues aux patients.
La robotique chirurgicale est I'un de ces domaines d'innovations technologiques. Les robots chirurgicaux peuvent accomplir diverses taches dans une salle d'operation, allant du robot autonome qui effectue une coupe osseuse a I'aide de I'imagerie 3D au systeme qui permet au chirurgien d'operer a distance tout en compensant pour les tremblements de ses mains. Precision, efficacite et accessibilite aux soins sont des exemples d'avantages potentiels de ces robots. Quelques systemes ont deja obtenu les accreditations necessaires et sont presentement utilises pour aider les chirurgiens en Europe et en Amerique.
Parmi les differentes disciplines, la chirurgie orthopedique est I'un de celles qui se prete bien - a la robotique chirurgicale (Taylor et al., 2003), (Davies et al., 2004). Par exemple,
I'orthopedie requiert des actions en milieu relativement stable et resistant (par rapport a d'autres domaines comme la neurochirurgie), ce qui facilite I'utilisation de systeme d'imagerie 3D pour la generation de trajectoire du robot.
Le groupe multidisciplinaire de recherche Orthogenius a ete cree a I'Universite de Sherbrooke pour developper divers outils pour la chirurgie orthopedique. Les echanges avec les chirurgiens orthopedistes du groupe Orthogenius ont permis de constater que plusieurs operations orthopediques pourraient potentiellement beneficier d'un robot chirurgical, d'ou I'interet de concevoir un robot polyvalent. L'apport d'un tel robot reposerait essentiellement
sur quelques actions: positionnement de I'outil dans I'axe, memorisation des positions/orientations, retour a une position memorisee, zone de securite virtuelle et dans une moins grande mesure la compensation de la gravite.
Plus precisement, un tel robot doit repondre aux besoins suivants :
1. Polyvalence : le robot doit etre concu pour plusieurs chirurgies differentes (Taylor et al., 2003).
2. Mobilite : pour se conformer aux contraintes d'espace actuelles, le robot ne doit pas etre fixe a une salle d'operation en particulier.
3. Imagerie 3D : le robot doit etre compatible avec un systeme de navigation (Liamini, 2008).
4. Discretion : il ne doit pas nuire au chirurgien ni trop alourdir les procedures.
5. Performance : le robot doit ultimement contribuer a ameliorer le geste chirurgical, que ce soit au niveau de la qualite des soins prodigues au patient ou de I'efficacite du systeme de sante.
6. Precision et positionnement: le robot doit etre utilise pour effectuer du positionnement d'outils. Le robot doit etre assez precis en position pour repondre aux besoins des differentes chirurgies.
Les systemes robotiques utilises presentement sont peu nombreux car le defi est de taille; les couts et la gestion du risque relie a leur developpement et leur utilisation freinent leur expansion. La recherche est done necessaire afin de permettre a ce secteur de se developper. La robotique etant une branche pluridisciplinaire, son developpement peut beneficier des innovations d'une multitude de domaines, par exemple du domaine des materiaux, des actionneurs, du controle, de ('intelligence artificielle et des procedes.
En ce qui concerne les actionneurs pour la realisation d'un robot comme un robot d'assistance en chirurgie orthopedique, I'Actionneur Differentiel Elastique (ADE) est un nouveau type d'actionneur haute-performance developpe au LABORIUS. II est constitue d'un moteur a courant continu sans balais et d'un ressort usine connectes en differentiel par un reducteur harmonique. Cet actionneur est concu pour des applications d'interaction humain/robot et robot/environnement securitaires de par ses caracteristiques :
1. Une basse impedance mecanique intrinseque qui le rend resistant aux impacts et reversible. Cette basse impedance, apportee par I'element elastique, permet d'utiliser
I'ADE en tant que composante de bras robotique pour des applications a proximite de I'humain et sujettes aux impacts.
2. Une mesure precise de force (couple) et de position (angle) integree. Ces mesures seront utilisees pour le controle de I'actionneur et permettent de surveiller les forces de contact afin de proteger le robot et I'environnement.
3. Un format compact est une caracteristique utile dans plusieurs applications, comme par exemple les exosquelettes et les robots destines a etre operes dans des endroits restreints.
L'utilisation d'un tel actionneur concu pour interagir avec I'humain represente une opportunity de recherche pour les robots chirurgicaux. Dans cette optique, I'ADE est utilise dans le cadre du present projet de recherche. Le projet se definit ainsi:
1. Developpement et implantation d'un controleur d'impedance mecanique pour I'actionneur differential elastique du laboratoire.
2. Experimentation et caracterisation des performances de I'actionneur controle en impedance.
3. Conception d'un prototype de bras de robot a trois degres de liberte en utilisant des ADE destine a interagir avec I'humain.
2. SYSTEMES D'INTERACTION HUMAIN/ROBOT
Ce chapitre presente des systemes robotiques qui interagissent physiquement avec des humains. La premiere section traite des robots chirurgicaux, avec un accent particulier porte sur les chirurgies orthopediques. La deuxieme section traite de robots cooperatifs utilises dans des applications non chirurgicales.2.1. Les robots chirurgicaux
Cette section traite des robots chirurgicaux utilises dans les hopitaux ou encore au stade de recherche. Bien que I'emphase soit sur la chirurgie orthopedique, certains systemes pertinents autres que ceux utilises dans ce domaine sont egalement explores. La definition d'un robot varie sensiblement dans la culture populaire et la litterature, il est done naturel que plusieurs proposent une definition differente pour un robot chirurgical. En regie generale, un robot chirurgical est un robot implique activement ou passivement lors d'une intervention chirurgicale.
2.1.1. Enjeux de la robotique chirurgicale
Les forces et faiblesses des robots different grandement de celles des humains. Bien exploites, les robots chirurgicaux ont certains avantages qui justifient leur utilisation, telle une meilleure qualite du geste chirurgical (ex.: gain de precision, de securite) et une predisposition a la chirurgie non invasive, diminuant le temps de recuperation du patient.
Du point de vue du systeme de sante, la robotique chirurgicale a aussi le potentiel d'apporter les avantages suivants (Taylor et al., 2003):
• diminution des couts de main d'oeuvre en raison d'une diminution de la quantite de personnel medical requis lors de la chirurgie,
• diminution du temps de sejour postoperatoire (chirurgie non invasive), • diminution des risques d'infection et de complications postoperatoires, • certains systemes peuvent aider a la formation du personnel,
Malgre ces avantages, la robotique chirurgicale reste un domaine tres jeune qui comporte certains risques. Outre la fastidieuse accreditation par les differentes associations gouvemementales1,1'essor des robots chirurgicaux est en partie freine par:
• Le cout prohibitif d'achat et de maintenance de certains systemes. • Les nombreuses contraintes de securite et de responsabilite.
• La formation du personnel et la complexity (facilite d'utilisation limitee). • La taille des systemes et le peu d'espace disponible en salle d'operation.
2.1.2. Classification generale des differents types de robots chirurgicaux
Les robots chirurgicaux peuvent etre classifies selon plusieurs methodes, soit par le design du manipulateur, par le niveau d'autonomie, par la tache medicale ciblee, etc. Une classification interessante distingue quatre grandes categories en fonction du type d'interaction entre le robot et le chirurgien, soit les systemes passifs, actifs, semi-actifs et de
tele-chirurgie (TROCCAZ et al., 2005).
Les systemes passifs laissent au chirurgien le plein controle du deroulement de I'operation. Habituellement, ces systemes mesurent et affichent de I'information. Par exemple, un bras non motorise muni de capteurs permet de connaTtre la position de I'outil chirurgical. Les
systemes actifs realisent une partie de Intervention de maniere autonome, normalement
sous la supervision du chirurgien. Ces robots sont munis d'un systeme de navigation qui leur permet de se positionner par rapport au patient. Les systemes semi-actifs demandent a la fois une action de I'operateur et une action du robot. Un exemple de systeme semi-actif pourrait etre un guide mecanique qui se positionne automatiquement en fonction de I'imagerie 3D afin de permettre au chirurgien d'effectuer une coupe dans le bon plan. La definition exacte de ce type de systeme varie dans la communaute scientifique. Les
systemes de tele-chirurgie permettent au chirurgien d'operer a distance : il peut par exemple
visualiser la zone de travail sur ecran et operer a I'aide de manettes de controle. Un robot dit «esclave» repete les mouvements du chirurgien sur le patient. Certains robots peuvent ameliorer ces mouvements en filtrant le tremblement ou en diminuant I'echelle de la force.
Schneider et al., 2001 propose une nouvelle categorie de robots chirurgicaux issue des robots semi-actifs, soit les systemes synergiques (ou cooperatifs). Ces systemes permettent une cooperation entre le robot et le chirurgien plus elaboree que le simple partage des taches normalement pratiquees par les systemes semi-actifs. Par exemple, un robot synergique pourrait manipuler I'outil chirurgical simultanement avec le chirurgien. Le robot et le chirurgien pourraient appliquer des forces sur I'outil, ce qui permettrait au robot de guider activement le chirurgien ou de lui restreindre I'acces aux zones identifies comme sensibles. Un tel robot pourrait aussi agir sur certains degres de liberte de I'outil et laisser libres les autres, agissant tel un filtre qui selectionnerait les gestes du chirurgien compatibles avec I'operation en cours. Le robot PADyC, presente a la section 2.1.4, est un exemple de robot synergique.
Les robots synergiques ont I'avantage de laisser le controle de I'operation au chirurgien. Plutot que de vouloir le remplacer, le robot devient un outil intelligent a son service, facilitant ainsi Integration et I'acceptation du systeme en milieu medical. Cette cooperation permet d'allier les forces de la robotique avec celles de I'humain. Les Hands-On robots (Davies et al., 2004) peuvent etre consideres comme le sous-ensemble principal des robots synergiques. Le chirurgien et le robot agissent simultanement sur I'outil chirurgical, alliant les sens et le jugement de la situation globale des humains avec la precision du robot.
2.1.3. Etude des robots chirurgicaux synergiques pour I'orthopedie
Cette section presente les robots Acrobot et Crigos, deux robots chirurgicaux synergiques destines aux interventions orthopediques.
Le systeme Acrobot2, illustre a la figure 2.1, est un petit robot specifiquement concu pour etre
securitaire et utilise dans une salle d'operation chargee et sterile (Jakopec et al., 2003).
Figure 2.1 Acrobot et diagramme des zones de contraintes (Jakopec et al., 2003)
Utilise pour effectuer des coupes osseuses lors de I'arthroplastie du genou, ce robot synergique fonctionne par empechement. II limite les deplacements de I'outil dans certaines situations et directions afin de permettre au chirurgien d'effectuer precisement les coupes selon le plan etabli. Dans la zone definie securitaire, le robot laisse le chirurgien deplacer I'outil librement. Le robot resiste au mouvement en augmentant sa rigidite lorsque I'outil approche de la zone limite. A la limite, le robot se bloque completement, empechant I'outil de sortir de la zone permise. Ce manipulateur de configuration cinematique spherique possede une basse impedance mecanique, ce qui permet a I'operateur de deplacer I'outil sans recourir a une grande force. II est place a I'extremite d'un gros bras manipulateur robotique qui est maintenu en place pour la duree de I'operation : il n'est utilise que pour positionner le petit robot spherique au meilleur endroit pour la coupe. Le chirurgien manipule I'outil a I'aide d'une poignee munie d'un capteur de force/couple a six axes. Ce systeme necessite une tomodensitometrie (TDM) afin d'elaborer une carte 3D de I'os avant la chirurgie. Lors de I'operation, une certaine quantite de points sur I'os sont echantillonnes afin que le systeme puisse positionner dans I'espace le modele d'os obtenu par la TDM. Cette procedure necessite que le tibia et le femur soient immobilises lors de la chirurgie a I'aide de guides mecaniques, soit un systeme de pinces metalliques steriles.
Le systeme repond aux attentes et une dizaine d'operations ont deja ete effectuees avec succes. Cependant, ce systeme necessite une TDM preoperatoire de la jambe, ce qui entraTne des couts et des delais additionnels. La motorisation spherique a 3 DDL limite I'utilisation pour d'autres applications; le gros robot manipulateur qui positionne Acrobot
pourrait etre remplace par un nouveau systeme pour permettre, par exemple, de positionner un outil de facon precise, selon differents axes.
Le robot CRIGOS? est utilise pour ia chirurgie orthopedique realisee a I'aide d'imagerie 3D
(Brandt et al., 1999). Ce robot, illustre a la figure 2.2, a ete concu en. utilisant une architecture parallele. Cette architecture a ete preferee a ['architecture serielle pour realiser un robot plus compact et precis.
Figure 2.2 Systeme CRIGOS (Brandt et al., 1999)
II est possible de le classer dans la categorie des systemes actifs car il peut effectuer des taches d'une maniere autonome. II comprend aussi un mode de fonctionnement prevu pour cooperer avec le chirurgien. II peut done aussi etre classe dans la categorie des systemes synergiques. Ce systeme de faible cout permet le controle exact des parametres d'usinage de I'os, comme par exemple la vitesse et les forces exercees par I'outil de meulage. En general, la zone de travail des robots d'architecture parallele est plus limitee que celle des robots d'architecture serielle. Cette limitation peut nuire a la polyvalence de I'outil, mais elle ne nuirait pas aux applications orthopediques car les zones de travail y sont limitees. Le peu d'information disponible sur ce systeme et ses modes de cooperation nuit a son analyse. II est cependant possible de conclure que la structure parallele semble tres appropriee pour les applications orthopediques.
2.1.4. Robots synergiques concus pour des chirurgies autres
qu'orthopediques
Certains systemes concus pour d'autres operations que I'orthopedie presentent des modes de cooperation interessants. Par exemple, le robot a six degres de liberie PADyC4, presente
a la figure 2.3, est destine a la chirurgie cardiaque (Schneider et al., 2001);
Figure 2.3 Robot PADyC et mecanisme Freewheel (Schneider et al., 2001)
L'outil chirurgical est tenu a la fois par le bras robotique et par le chirurgien. Ce systeme fonctionne par empechement: I'operateur deplace lui-meme l'outil. La motorisation du bras n'est utilisee que pour limiter la vitesse maximale de rotation de chacun des joints a I'aide de deux Freewheels opposees. Le principe de fonctionnement d'une Freewheel est similaire a celui d'une cle a cliquets : les billes noires (figure 2.3) imposent une contrainte de vitesse relative entre la partie interieure (motorisee) et la partie exterieure (actionnee par I'humain). En se bloquant, les billes empechent la partie exterieure de toumer plus vite en sens horaire que la partie centrale. La vitesse horaire couser doit done etre inferieure a la vitesse du moteur
u),. En utilisant deux Freewheels opposees, la vitesse wuser devient done limitee a une plage
definie par les vitesses u)| des deux moteurs : une pour le sens de rotation horaire et une pour le sens antihoraire. Ces deux vitesses peuvent etre nulles et/ou differentes. Le systeme agit done sur l'outil en limitant ses deplacements dans une plage planifiee. La tache a accomplir est decrite a I'aide d'une combinaison des modes suivants :
1. Free mode : Aucune vitesse n'est limitee, la position de l'outil est enregistree.
2. Position mode: Les emplacements vers la position et I'orientation desirees par le systeme sont permis.
3. Trajectory mode : Ce mode restreint les deplacements de I'outil a une trajectoire. 4. Region mode : Ce mode permet une totale liberte de mouvement a I'interieur (ou a
I'exterieur) d'une zone predefinie, soit une zone de travail limitee.
5. Specific modes: Ces modes sont des trajectoires ou des regions optimisees (coniques, lineaires, planaires, etc.).
Les joints du robot bloquent si I'alimentation electrique est interrompue, ce qui empeche le manipulateur de tomber sur le patient. Cependant, la structure du robot n'est pas assez rigide pour etre utilisee en salle d'operation; cette trop grande elasticite pourrait permettre des mouvements non desires sous I'effet de forces exterieures (Troccaz et al., 2005). Le systeme actuel etant trop volumineux et lourd, le laboratoire TIMC5 travaillerait sur un nouveau
systeme mini-PADyC muni d'une transmission a cables. La passivite du systeme limite probablement les applications possibles considerant que le robot ne peut aider le chirurgien a forcer.
Le Steady Hand Robot (figure 2.4) est un robot compact a 7 degres de liberte destine a augmenter les performances humaines pour des manipulations tres precises en surface, telle la microchirurgie de la retine (Kumar et al., 2000). L'outil est tenu simultanement par le chirurgien et le bras robotique. Le robot mesure la force exercee par I'operateur sur la poignee de l'outil ainsi que celle de la pointe de l'outil sur I'environnement. Le systeme est tres rigide et utilise ces informations pour positionner avec precision l'outil afin de diminuer selon un facteur d'echelle, 25 :1 par exemple, la force de I'operateur par rapport a la force mesuree a l'outil. Par consequent, I'operateur ne deplace pas directement l'outil avec sa force. Le systeme ne permet done pas de reduire avec un facteur d'echelle les deplacements de I'operateur, contrairement aux systemes tele-operes.
5 Techniques de Plmagerie, de la Modelisation et de la Cognition situe a I'lnstitut d'informatique et de
fhandleft) Force Instrumented I Handle I Hand If ROBOT ARM & TOOL Tool Compliance Environment Compliance '/ Tool '/ Tip V'
h
x(t) Arm Position f(t)Tool Tip Force
Figure 2.4 Robot Steady-Hand et schema de fonctionnement (Kumar et al., 2000)
Utilisant ce concept de «force scaling», le manipulateur permet de travailler avec les tissus mous d'impedance non lineaire. Le deplacement de I'outil est tres lent, ce qui peut allonger la duree de I'operation. Ce systeme est dedie aux taches tres precises en contact avec des tissus mous avec des forces de reaction tres precises; la resolution en force a la pointe est de I'ordre de 0,001 N.
2.2. Les exosquelettes
Suite a la presentation des robots synergetiques chirurgicaux de la section precedente, il est possible de tirer les deux conclusions suivantes :
1. II existe differentes approches mecaniques viables pour la cooperation humain/robot: Taction motorisee d'Acrobot.qui augmente la resistance au deplacement de I'outil, les
contraintes dynamiques de PADyC et le force scaling du robot tres raide Steady-Hand.
2. L'encombrement de la salle d'operation est un point critique : CRIGOS et Steady-Hand sont compacts pour cette raison. PADyC mentionne le probleme de la taille qui limite I'integration en milieu medical.
II existe une categorie de systemes de cooperation humain/robot concue pour augmenter les capacites de I'operateur et qui n'encombre pas ou peu I'espace de par sa nature : les exosquelettes robotises. Les sections suivantes presentent ce type de systeme et analysent le potentiel d'un exosquelette destine a la chirurgie orthopedique.
2.2.1. Definition d'un robot de type exosquelette
En biologie, un exosquelette est le squelette externe d'un organisme, tel la carapace d'un crustace, d'un insecte ou d'un arachnide. Dans les ceuvres de science fiction, plusieurs voient les exosquelettes comme des armures futuristes motorisees qui decuplent les capacites physiques du soldat qui la porte.
En robotique, le mot exosquelette est utilise pour un appareil qui s'adapte aux membres d'un humain et dont les capteurs transmettent a une machine les donnees relatives aux mouvements des membres. La definition peut etre elargie pour inclure les bras robotiques cooperatifs qui sont soit portes par I'humain ou attaches a son corps. Ces systemes sont habituellement utilises pour (Veneman et al., 2006):
• augmenter ou remplacer les capacites motrices humaines, dans des applications militaires ou pour les gens a motricite reduite.
• interfacer I'humain et un environnement virtuel, soit pour des jeux, des systemes de musculation haute-performance ou pour un systeme haptique de telepresence (telemanipulation d'objets dangereux et/ou fragiles).
• entraTner les habiletes motrices des membres, pour la formation ou I'exercice destine a rehabiliter des fonctions diminuees suite a un accident.
2.2.2. Classification des exosquelettes
Les exosquelettes sont destines soit aux membres superieurs, aux membres inferieurs ou au corps complet. La litterature identifie trois differentes architectures d'exosquelettes: I'architecture anthropomorphique, non anthropomorphique et pseudo anthropomorphique (Zoss et al., 2005).
Les exosquelettes d'architecture anthropomorphique tentent de reproduire I'architecture des membres humains, ce qui permet de minimiser les risques de collision entre le corps et I'exosquelette et de choisir les points d'attache. Cette option apporte cependant plusieurs difficultes car les joints humains (articulations) n'ont pas d'axes de rotation fixes et sont difficiles a reproduire avec les technologies d'actionneurs actuelles. Leur nombre et leur redondance force les exosquelettes anthropomorphiques a avoir un grand nombre de degres de liberte. Certains systemes developpent des strategies pour eviter cette complexite, tels les degres de liberte passifs ou les degres volontairement ignores (translations de I'epaule). lis doivent aussi s'ajuster aux dimensions des utilisateurs sur lesquels ils se rattachent.
Les exosquelettes d'architecture non-anthropomorphique permettent davantage de liberte de design car ils ne suivent pas I'architecture des membres humains et se rattachent a ceux-ci qu'a des points precis, comme par exemple aux extremites. Le risque de collision et d'interference doit cependant etre adresse ainsi'que le risque que I'exosquelette force les membres humains a adopter une configuration non confortable ou en dehors des limites naturelles. Les exosquelettes d'architecture pseudo-anthropomorphique sont en fait des exosquelettes qui suivent la forme des membres sans necessairement chercher a reproduire exactement toutes leurs articulations. Afin de permettre cette difference, les points d'attache sont situes aux extremites, soit par exemple a la hanche et au pied pour un exosquelette de jambe ou au dos et au poignet pour un exosquelette de bras. Cette configuration permet de
reduire le risque d'interference entre I'humain et I'exosquelette.
2.2.3. Etude des exosquelettes existants
Plusieurs concepts d'exosquelettes tres differents sont presentement developpes en laboratoire pour la recherche ou la defense. Bien qu'ils semblent provenir d'un film de
science fiction, ils se rapprochent du quotidien : un des systemes presente dans cette section est deja commercialise.
Le Berkeley Lower Extremity Exoskeleton (BLEEX) est un exosquelette autonome energetiquement concu pour permettre aux soldats de porter des charges additionnelles sur des terrains accidentes (Zoss et al., 2005). II utilise des verins hydrauliques lineaires et compte sept degres de liberte rotatifs par jambe. L'extremite des jambes de BLEEX comporte un pied, ce qui lui permet de porter son propre poids ainsi que celui de la charge additionnelle en le transmettant directement au sol plutot que.sur I'ossature du porteur. II est d'architecture pseudo anthropomorphique; les seuls points d'attache rigides s'ont situes aux pieds et au torse, tel qu'illustre a la figure 2.5.
Figure 2.5 Exosquelette BLEEX (Zoss et al., 2005)
Le systeme de controle de I'exosquelette cherche a minimiser les forces d'interaction entre le porteur et le robot. Ce systeme n'utilise pas de capteurs de force a I'interface porteur/exosquelette, il base son controle principalement sur des mesures prises sur
I'exosquelette pour estimer I'intention du porteur. Ces mesures proviennent d'accelerometres, d'encodeurs aux joints ainsi que de capteurs de force d'interaction avec le sol et en serie avec les verins hydrauliques. Un tel systeme de controle represente un domaine de recherche en soi. De plus, ce systeme cherche a augmenter la force plutot qu'a guider les deplacements du porteur.
L'exosquelette LOPES (Figure 2.6) est un robot de readaptation de la demarche a impedance mecanique controlee pour I'entraTnement en tapis roulant (Veneman et al., 2006). La principale fonction de LOPES est de remplacer I'interaction mecanique du physiotherapeute et du patient, tout en laissant au specialiste le jugement de la situation. Une caracteristique interessante de ce systeme est qu'il utilise des actionneurs seriel-elastiques (Williamson, 1995) couples a des transmissions a cable flexible. Les auteurs identifient que le controle d'impedance mecanique est necessaire pour repondre aux deux modes d'operation identifies : I'impedance mecanique du robot doit etre elevee pour guider le porteur dans le mode robot-in-charge et elle doit etre tres faible dans le mode patient-in-charge car les forces d'interaction desirees sont nulles.
Figure 2.6 Exosquelette LOPES (Veneman et al., 2006)
Afin d'optimiser le controle d'impedance en reduisant I'impedance intrinseque du robot, l'exosquelette LOPES a ete concu leger et motorise, avec des actionneurs de faible impedance passive et de faible friction. L'utilisation d'une transmission par cable permet de diminuer la masse et I'inertie des membres de l'exosquelette en positionnant les moteurs a la
base du robot, loin des articulations soumises aux grands deplacements. Bien que ce systeme ne soit pas assez rigide pour obtenir la precision requise par une chirurgie, il presente des elements de solution interessants.
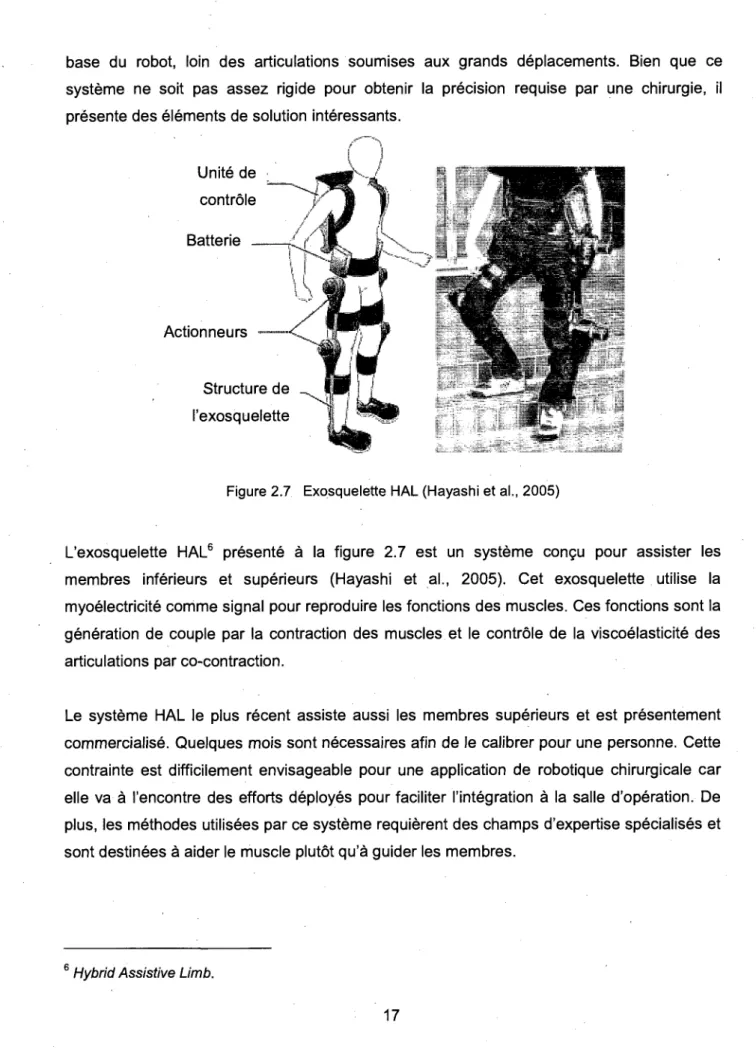
Figure 2.7 Exosquelette HAL (Hayashi et al., 2005)
L'exosquelette HAL6 presente a la figure 2.7 est un systeme concu pour assister les
membres inferieurs et superieurs (Hayashi et al., 2005). Cet exosquelette utilise la myoelectricite comme signal pour reproduire les fonctions des muscles. Ces fonctions sont la generation de couple par la contraction des muscles et le controle de la viscoelasticite des articulations par co-contraction.
Le systeme HAL le plus recent assiste aussi les membres superieurs et est presentement commercialise. Quelques mois sont necessaires afin de le calibrer pour une personne. Cette contrainte est difficilement envisageable pour une application de robotique chirurgicale car elle va a I'encontre des efforts deployes pour faciliter I'integration a la salle d'operation. De plus, les methodes utilisees par ce systeme requierent des champs d'expertise specialises et sont destinees a aider le muscle plutot qu'a guider les membres.
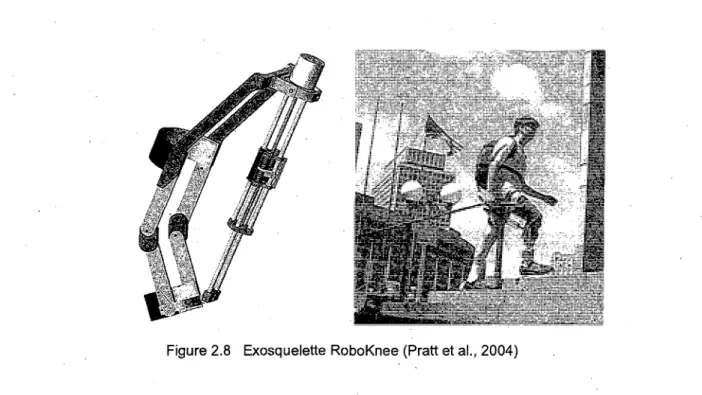
Figure 2.8 Exosquelette RoboKnee (Pratt et al., 2004)
Tout comme I'exosquelette LOPES, le systeme RoboKnee utilise des actionneurs seriel-elastiques pour leur basse impedance intrinseque (Pratt et al., 2004). Le systeme RoboKnee, presente a la figure 2.8, consiste en un simple exosquelette d'un degre de liberte utilise pour assister l'articuiation du genou. Le couple fourni au genou par I'actionneur est determine par les forces de reaction au sol et Tangle du joint. La transparence du systeme a ete une des priorites de ce projet: elle permet au porteur de gravir des escaliers ou de porter des charges supplementaires sans changer sa demarche habituelle. Bien que confdrtable, le systeme est difficile a mettre et a enlever, et ne permet pas au porteur de s'asseoir en raison de I'actionneur lineaire. Un actionneur elastique rotatif (comme I'ADE) remedierait a ce probleme. Les conclusions amenees pour le systeme LOPES sont applicables pour le systeme RoboKnee et reaffirment le besoin d'une faible impedance pour un robot qui interagit avec I'humain.
3. SPECIFICATIONS POUR LA PREUVE DE
CONCEPT DU BRAS INTERACTIF
La litterature presente plusieurs robots chirurgicaux interessants et plusieurs realisent avec succes les taches pour lesquelles ils ont ete concus. Malgre ces avancements, les points suivants requierent davantage de developpement:
1. La polyvalence des robots chirurgicaux est insuffisante. En plus de reduire les couts de conception (et done d'achat), les possibilites accrues d'un systeme polyvalent augmenterait sa valeur ajoutee et eviterait les contraintes generees par I'achat d'autres systemes specialises (Davies et al., 2004).
2. La modularity des systemes (Taylor et al., 2003) permet de diminuer les couts et d'accelerer les processus de conception et d'accreditation.
3. L'integration a la salle d'operation demeure un des points majeurs qui freine I'expansion de la robotique chirurgicale. Les contraintes d'encombrement, d'accessibilite, et d'entretien doivent etre adressees (Troccaz et al., 2005).
4. Les systemes doivent etre le moins dispendieux possible et le plus confortable possible pour les chirurgiens. Ce point represente davantage un objectif a atteindre pour tous les projets qu'une veritable opportunity d'innovation, mais demeure une caracteristique critique des systemes d'interaction.
L'etude des exosquelettes apporte des elements de solution interessants relatifs a la transparence d'utilisation, la basse impedance et les strategies depositionnement des actionneurs.
Dans le cadre du present projet, il a ete choisi de concevoir un robot de type synergique. Les avantages de ces systemes decrits dans la litterature, I'experience du groupe avec les actionneurs concus pour I'interaction ainsi que les intentions strategiques du laboratoire ont fortement motive ce choix. Le type de robot synergique initialement envisage etait un exosquelette pseudo-anthropomorphique pour un bras. A la lumiere des informations obtenues de la revue de litterature et des chirurgiens impliques, il a ete convenu qu'un exosquelette porte directement par le chirurgien ne representait pas un besoin reel en raison des points suivants :
1. I'agrandissement de la zone de travail apporte par un exosquelette ou un robot portable ne represente pas un besoin de la chirurgie orthopedique. En effet, la zone
de travail de ces chirurgies est petite7 et atteignable par des robots fixes
conventionnels.
2. La masse du robot portee par le chirurgien est une charge indesirable qui a le potentiel de nuire grandement au confort et a I'acceptation des utilisateurs. Les operations peuvent durer plusieurs heures et une masse de quelques kilos represente un obstacle majeur a Integration du systeme.
3. Le besoin principal de I'orthopedie est le gain de precision en positionnement, ce qui necessite traditionnellement une structure raide et une base fixe. Un robot porte sur le dos de I'utilisateur aurait une base tres mobile et le besoin de grande raideur pourrait aller a I'encontre des contraintes de poids.
En raison des enormes defis relies a la portion medicale, il a ete decide dans un premier temps de travailler sur une preuve de concept technologique permettant de repondre a ces besoins, plutot que de travailler directement au niveau de I'application chirurgicale. Le concept d'exosquelette n'a done pas ete retenu.
La preuve de concept realisee dans le cadre de ce projet consiste a utiliser I'ADE dans la conception d'un premier prototype de bras interactif. Ce bras servira lors de projets futurs a etudier la facon dont les interactions humain/robot, a I'aide du controle de I'impedance mecanique des actionneurs, permettent d'augmenter les capacites humaines de manipulation. Le prototype sera de type cooperatif (synergique), soit un systeme ou I'operateur et le robot partagent simultanement le controle de I'instrument.
Le bras pourra fournir une assistance aux gestes par un retour de force, notamment dans des applications de suivi de trajectoires et de creation de zones de securite. En tant que prototype, le bras est compose de trois degres de liberte. Tel que mentionne precedemment, les nombreuses contraintes reliees a la conception d'un robot chirurgical ne seront pas prises en consideration car le prototype realise consiste en un banc d'essai pour etudier les interactions humain/robot.
4. CONTROLE DE L'ACTIONNEUR
DIFFERENTIEL ELASTIQUE
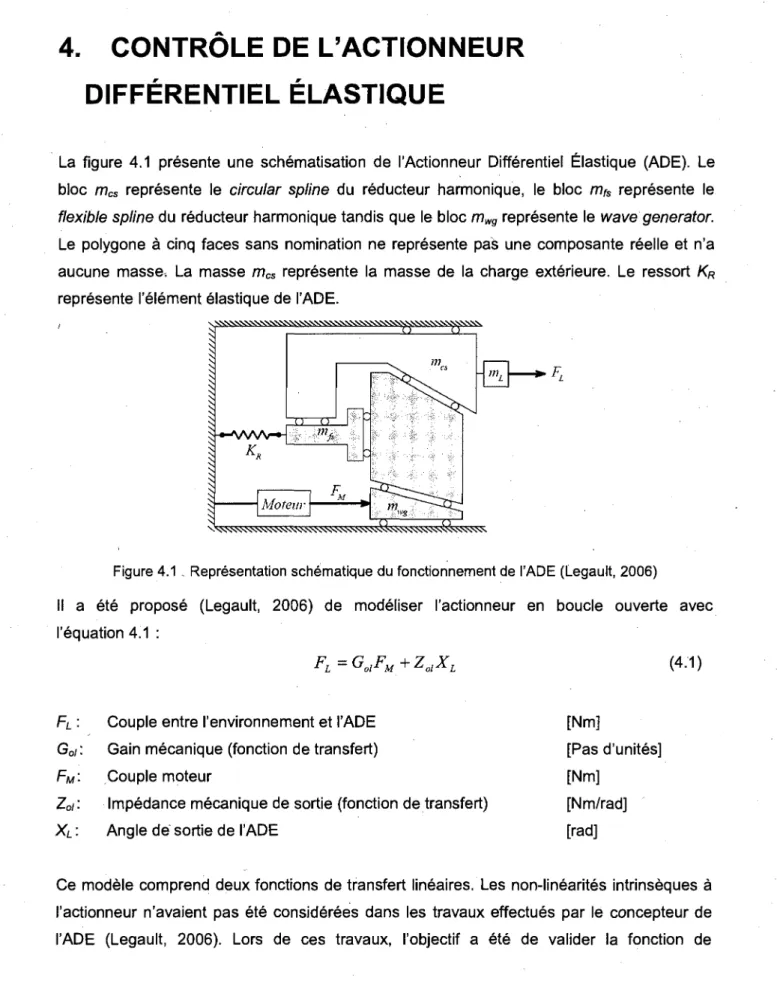
La figure 4.1 presente une schematisation de I'Actionneur Differentiel Elastique (ADE). Le bloc mcs represente le circular spline du reducteur harmonique, le bloc mfs represente le
flexible spline du reducteur harmonique tandis que le bloc mwg represente le wave generator.
Le polygone a cinq faces sans nomination ne represente pas une composante reelle et n'a
aucune masse. La masse mcs represente la masse de la charge exterieure. Le ressort KR
represente I'element elastique de I'ADE.
s ^ £ ^ S £ £ £ £ £ £ £ £ £ & £ £ £ i £ £ £ £ £ ^ £ & £ £ £ £ £ 2 £ £ £ ^ ^
V = 5 ^ J 5 ^ S S ^ ? 5 ^ 5 J ? 5 ^ J ? S J 5 ^ ^
Figure 4.1 Representation schematique du fonctionnement de I'ADE (Legault, 2006)
II a ete propose (Legault, 2006) de modeliser I'actionneur en boucle ouverte avec I'equation 4.1 :
FL = GoIFM + ZolXL (4.1)
FL : Couple entre I'environnement et I'ADE
G0;: Gain mecanique (fonction de transfert)
FM: Couple moteur
Z0/: Impedance mecanique de sortie (fonction de transfert)
XL: Angle de sortie de I'ADE
[Nm]
[Pas d'unites] [Nm]
[Nm/rad] [rad]
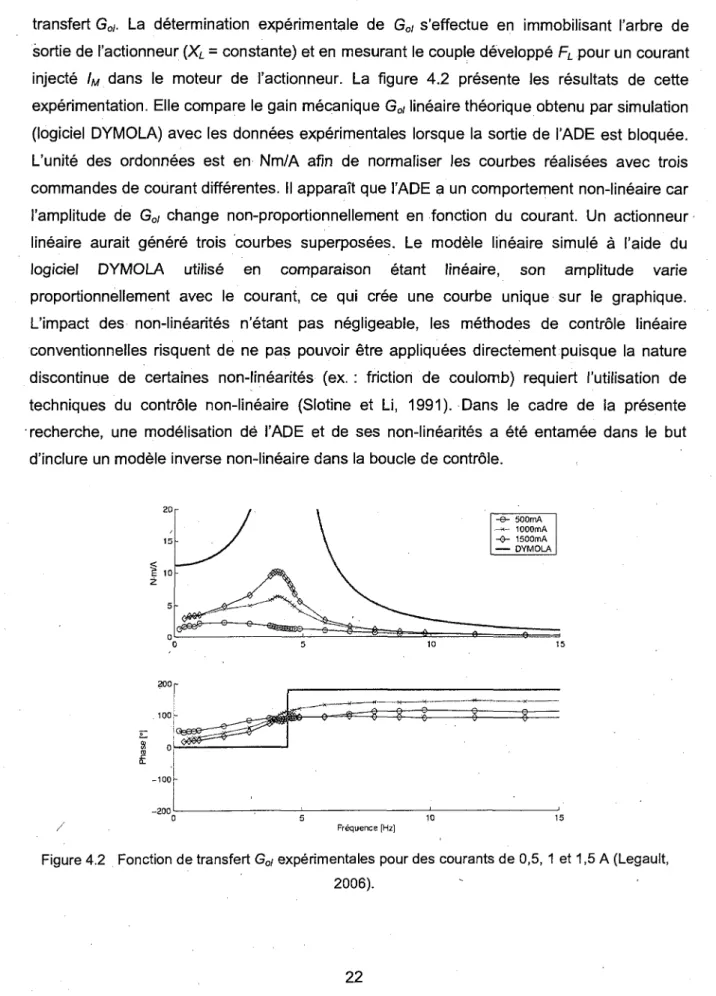
Ce modele comprend deux fonctions de transfert lineaires. Les non-linearites intrinseques a I'actionneur n'avaient pas ete considerees dans les travaux effectues par le concepteur de I'ADE (Legault, 2006). Lors de ces travaux, I'objectif a ete de valider la fonction de
transfert G0i- La determination experimental de G0, s'effectue en immobilisant I'arbre de
sortie de I'actionneur (XL = constante) et en mesurant le couple developpe FL pour un courant
injecte lM dans le moteur de I'actionneur. La figure 4.2 presente les resultats de cette
experimentation. Elle compare le gain mecanique G0, lineaire theorique obtenu par simulation
(logiciel DYMOLA) avec les donnees experimentales lorsque la sortie de I'ADE est bloquee. L'unite des ordonnees est en Nm/A afin de normaliser les courbes realisees avec trois commandes de courant differentes. II apparaTt que I'ADE a un comportement non-lineaire car I'amplitude de G0, change non-proportionnellement en fonction du courant. Un actionneur
lineaire aurait genere trois courbes superposees. Le modele lineaire simule a I'aide du logiciel DYMOLA utilise en comparaison etant lineaire, son amplitude varie proportionnellement avec le courant, ce qui cree une courbe unique sur le graphique. L'impact des non-linearites n'etant pas negligeable, les methodes de controle lineaire conventionnelles risquent de ne pas pouvoir etre appliquees directement puisque la nature discontinue de certaines non-linearites (ex.: friction de coulomb) requiert I'utilisation de techniques du controle non-lineaire (Slotine et Li, 1991). Dans le cadre de la presente recherche, une modelisation de I'ADE et de ses non-linearites a ete entamee dans le but d'inclure un modele inverse non-lineaire dans la boucle de controle.
Frequence [Hz] 200 0 - 1 0 0 r _ ^
• S S S S S ^
*" nx
X QFigure 4.2 Fonction de transfert G0/ experimentales pour des courants de 0,5, 1 et 1,5 A (Legault,
L'ancienne carte d'alimentation du moteur qui avait ete utilisee pour produire les resultats de la figure 4.2 a ete changee par une nouvelle carte (decrite a la section 5.1), ce qui a eu un impact significatif sur le comportement de I'ADE. Cette difference de comportement peut etre expliquee par le fonctionnement different des deux cartes : la premiere carte est asservie en courant et presente un comportement non lineaire (Legault, 2006) tandis que la nouvelle carte n'a aucun asservissement et applique directement le PWM demande par le controleur, ce qui consiste en un pilotage en tension. Un nouveau modele lineaire de I'ADE a done pu etre developpe avec DYMOLA (annexe A).
4.1. Approches de controle pour les taches d'interaction
humain-robot
Cette section presente differentes approches de controle pour les taches d'interaction humain-robot et justifie le choix du controle d'impedance.
4.1.1. Controle classique
Tout robot manipulateur ayant a interagir avec l'environnement doit le faire d'une maniere securitaire et contrdlee. Les forces d'interaction entre l'environnement et le robot doivent etre controlee autant lors du fonctionnement normal que lors de collisions imprevues (Williamson, 1995). Lors des interactions humain-robot, I'humain est considere comme un environnement imprevisible, relativement fragile et extremement precieux. La connaissance de ces forces et le respect des limites permises est done encore plus importante.
Un robot de faible impedance mecanique muni d'un controle en vitesse/position pourrait repondre a ces criteres si le controleur mesure et limite les forces d'interaction a I'aide de capteurs appropries. Cependant, un tel robot serait limite aux taches de positionnement et ne pourrait effectuer de taches ou le controle des forces d'interaction est necessaire. Cette strategie ne permet pas directement de dieter le comportement du robot lorsque soumis aux perturbations exterieures provoquees par I'interaction. Un robot controle en force permet d'interagir avec un humain tout en controlant les efforts d'interaction entre I'humain et le robot. II est cependant plus difficile pour le robot de se deplacer dans I'espace lors de taches necessitant un positionnement precis ou de guider I'humain dans une tache ou la precision
de la position est importante. Un controleur hybride force/position ou force/vitesse pourrait etre envisage (Craig, 2005), mais ce type de controleur est davantage destine a interagir avec des environnements connus et passifs. Le controleur doit pouvoir detecter le contact, ce qui est plus difficile avec un environnement d'impedance variable et potentiellement faible (I'humain). De plus, en cas de contact, I'imprevisibilite de I'humain ne permet pas I'utilisation de profils de force predefinis (Lee et Lee, 1991). Le profil de force risque de dependre de la position, ce que propose le controle d'impedance pour repondre aux besoins du controle d'interaction.
4.1.2. Controle d'impedance
Considerant que le controle classique cherche a controler soit la variable de flux (vitesse ou position), soit la variable d'effort, le controle d'impedance cherche plutot a controler la relation entre ces deux variables au port de sortie de I'actionneur. Cette strategie de controle est consideree pour I'interaction humain-robot car elle permet de proteger I'humain en minimisant I'impedance mecanique du robot et tient constamment compte des efforts d'interaction mesures (Buerger, 2005).
II est par exemple possible de demander au port de reproduire I'impedance mecanique d'un systeme passif ressort-amortisseur afin de permettre a I'actionneur d'interagir avec un environnement inconnu en minimisant les risques de bris.
4.2. Controle d'impedance de I'ADE
Cette section presente en detail le controleur d'impedance realise pour I'actionneur differentiel elastique.
4.2.1. Choix du type de controle d'impedance
L'impedance consideree dans le cadre de cette recherche correspond a une fonction de transfert d'ordre 1 (systeme passif ressort-amortisseur). L'ADE etant concu pour reproduire de basses impedances, la pertinence d'ajouter I'inertie est discutable car elle ne permet pas d'obtenir des impedances plus basses et elle peut destabiliser le systeme en emmagasinant
de I'energie cinetique. Une impedance desiree d'ordre 1 est assuree de ne pas ajouter d'oscillations lorsque soumise a une excitation non oscillante.
Toutefois, il est possible que lors de travaux futurs I'inertie soit ajoutee pour permettre une meilleure filtration des tremblements du bras humain. Comme Timpedance desiree est lineaire, elle est egale a I'inverse de l'admittance mecanique.
Pour un actionneur comme I'ADE comprenant un capteur pour chaque variable (couple et angle), deux types de controle d'impedance sont consideres, soit le Position based
impedance control et le Force based impedance control (Hurmuzlu et Nwokah, 2001). Les
figures 4.3 et 4.4 presentent les schemas simplifies des deux types de controle d'impedance.
Admittance desiree
t
Angle desire Regulation
de Tangle
Commande
Angle mesure
Actionneur
Couple mesure
Figure 4.3 Controleur d'impedance base sur la position (angle) Commande Impedance
desiree
I
Couple desire Regulation
du couple
Couple mesure
Angle mesure
Figure 4.4 Controleur d'impedance base sur la force (couple)
Les blocs de regulation de Tangle et du couple symbolisent respectivement le correcteur d'un asservissement d'angle et le correcteur d'un asservissement de couple. Les lois de commande 4.2 et 4.3 exprimees dans le domaine de Laplace peuvent etre utilisees pour ces deux types de controle d'impedance.
Controle d'impedance base sur Tangle:
V=C(— X) (4.2)
Controle d'impedance base sur le couple :
V
C=C
C(X(B
S+ K)-F) (4.3)
X F B K Va V0 Ca CcPosition ou angle mesure [m] ou [rad] Force ou couple mesure [N] ou [Nm]
Amortissement visqueux desire [Ns/m] ou [Nms/rad] Raideur desiree [N/m] ou [Nm/rad] Commande du controle base sur Tangle [V] Commande du controle base sur le couple [V]
Fonction de transfert du correcteur du controle d'impedance base sur la position Fonction de transfert du correcteur du controle d'impedance base sur le couple
En Tabsence d'une mesure directe de vitesse, le controle base sur le couple implique {'utilisation d'une derivee du signal de position (equation 4.3). En regie generate, les derivees ont tendance a augmenter le bruit dans les signaux en amplifiant les hautes frequences (Bilodeau et Papadopoulos, 1998). Inversement, Tintegrateur correspondent a Tadmittance desiree dans la loi de commande du controle d'impedance base sur la position agit comme un filtre qui attenue le bruit du capteur de couple. La consigne d'angle generee est done tres peu bruitee, ce qui ameliore le comportement du controleur et rend non necessaire Tutilisation de filtres sur les mesures des capteurs. De plus, un integrateur est causal contrairement a un derivateur qui n'existe pas en realite car il requiert la connaissance du futur. En controle temps-reel, un derivateur ne peut qu'etre approxime par un filtre passe-haut. Le controle d'impedance base sur la position a done ete prefere au controle base sur le couple.
4.2.2. Loi de commande du controleur
La loi de controle utilisee est une variante du controleur d'impedance base sur Tangle (equation 4.2) utilisant un correcteur proportionnel-derivatif (PD). Un correcteur PD a ete choisi plutot qu'un PID car le gain integral est indesirable en raison du peu d'importance accordee a une eventuelle erreur en regime permanent. Par exemple, un humain
interagissant avec un bras robotique qui reproduit un ressort virtuel ne remarquera pas une erreur constante de 10% sur la force que devrait reproduire le robot (done sur la raideur du ressort virtuel) mais remarquera aisement un dephasage (retard) sur cette force lors des periodes transitoires. Partant de I'equation 4.2, un changement de variables est requis pour tenir compte de I'implantation du capteur de couple :
F = -Fr
X = XL (4.4)
Avec:
XL: Angle de sortie mesure de I'ADE [rad]
Fr: Couple mesure de I'ADE [Nm]
Le correcteur utilise est un proportionnel-derivatif (PD), tel que defini en (4.5): Ca=KlS + K2
Va=(Kls + K2)(--^--XL) (4.5)
Bs + K
Va=-{KlS + K2)XL-K'S + KlFr
Bs + K
Si, pour des fins de simplification, on remplace K? et K2 par les variables suivantes :
Kx=KtiB
K2=KtiK + Kp
(4.6) Avec Kti et Kp deux constantes reelles positives representant deux gains du correcteur, on
retrouve : KtiBs + KtiK + KB Va=-(KtiBs + KtiK + Kp)XL - ^ L _ — - ^ ?-Fr Bs + K ( 4 7 ) Va=-(Kti(Bs + K) + Kp)XL-{Ktt+-^~-)Fr Bs + K
En raison des desavantages amenes par le calcul de la derivee d'une mesure de capteur et en I'absence d'une mesure de vitesse, I'equation 4.7 a ete simplifiee pour obtenir I'equation 4.8 en retirant la portion du derivateur dans le terme qui multiplie Tangle XL:
Va = -(Kti ()(s + K) + Kp)XL- (Kti + -^f~)Fr
Us K (4.8)
Va=-(KtiK + Kp)XL-(Kti+-^-)Fr
Cette simplification revient a faire I'hypothese que B est petit dans la partie de la loi de commande qui multiplie XL. Afin de simplifier I'expression, le gain KsKa ete renomme Kvs:
K.=K.K
V
a=-(K
vs+K
p)X
L-(K
H+-K„
:)F
r(4.9)
Bs + K
Tel que le demontre cette equation, le gain Kvs est nul lorsque I'admittance desiree ne
contient aucune raideur {K = 0). Plutot que de conserver le lien theorique entre le gain Kti et
Kvs, ils sont laisses independants afin de laisser plus de liberie pour ajuster le controleur lors
des essais experimentaux. Si on ajoute une trajectoire desiree Xd, I'equation 4.9 devient:
V
a=(K
vs+K
p)*{X
d-X
L)-(-^-
+K
ti)F
rBs + K
(4.10)
L'equation 4.10 a ete utilisee pour le controle du bras interactif lorsqu'une trajectoire desiree a ete demandee au bras (chapitre 6).
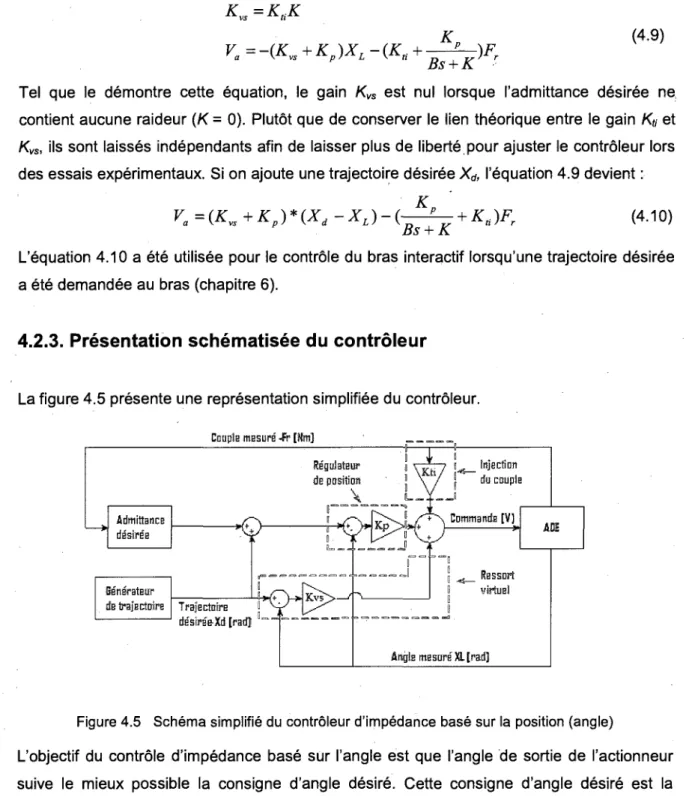
4.2.3. Presentation schematisee du controleur
La figure 4.5 presente une representation simplifiee du controleur. Couple mesure -R" [Mm] Admittance desiree Eenefateur de trajectnire TrajE-ctntPE de'sire'e-Xd [fad] Injection du couple Commande [V] Ressort virtue]
Angle mesure'XI [ratfj
AD!
Figure 4.5 Schema simplifie du controleur d'impedance base sur la position (angle)
L'objectif du controle d'impedance base sur Tangle est que Tangle de sortie de Tactionneur suive le mieux possible la consigne d'angle desire. Cette consigne d'angle desire est la
somme de la trajectoire desiree Xd et de la deviation provoquee par Taction du couple
mesure. Cette deviation correspond a la «deformation» ou au «deplacement» de I'admittance desiree soumise au couple mesure. Plus specifiquement, les entrees du controleur sont:
1. La trajectoire desiree (Xd): Tangle de sortie en fonction du temps que I'actionneur doit
suivre dans un monde ideal (hypothese d'admittance desiree nulle). Cette trajectoire desiree peut par exemple etre generee par la cinematique inverse d'un bras de robot utilisant des ADE controles en impedance.
2. La mesure du capteur de couple (-Fr), <•
3. La mesure du capteur d'angle ( X j .
II est aussi possible de considerer les coefficients de la fonction de transfert de I'impedance comme une entree si cette impedance doit varier au cours de T experience. Varier I'impedance peut servir a simuler le contact avec un mur virtuel ou a creer des zones de securite comme celles utilisees par le robot Acrobot presente a la section 2.1.3. La sortie du controleur est une commande de tension envoyee par CAN a la carte de controle du moteur. Cette derniere fournit cette tension par PWM au moteur de I'ADE.
La representation schematique de la loi de commande permet de separer la contribution des gains Kp, Kti et Kvs en trois composantes distinctes. Ces trois composantes, mises en
evidence dans la figure 4.5, ont ete respectivement surnommees regulateur de position,
composante d'injection de couple et composante de ressort virtuel.
• Le regulateur de position consiste en une simple boucle de retroaction avec correcteur proportionnel (gain Kp) qui a pour consigne Tangle de deformation genere
par Tadmittance desiree. Avec Tadmittance desiree, cette composante forme le cceur du controleur, soit le schema simplifie presente a la figure 4.3. Un second regulateur de position de type RST a ete developpe en collaboration avec Philippe Retornaz pour implementer le controle d'impedance dans un microcontroleur PIC (Retornaz, 2007).
• La composante d'injection du couple est un simple gain proportion nel (Kti) qui a pour
entree le couple mesure et pour sortie une commande en tension qui s'ajoute aux commandes des autres composantes. Cette composante se comporte comme un asservissement en couple de consigne nulle. Elle lutte contre la deformation du ressort interne de TADE, ce qui a pour effet de diminuer Tenergie potentielle emmagasinee par ce ressort. Les premieres experimentations ont permis de constater que cette composante apporte deux contributions benefiques au controleur:
1. Une augmentation de la stabilite en diminuant I'energie potentielle emmagasinee dans le ressort. La marge de gain Kp augmente avec la valeur du gain Kti.
2. Une diminution marquee de I'impedance mecanique du systeme. Les premieres
observations indiquent que cette diminution est benefique lorsque I'admittance desiree est relativement elevee.
Lorsque I'impedance demandee est relativement elevee, le gain Kti peut etre reduit
afin d'obtenir un compromis entre la stabilite et la performance. Consequemment, le gain Kp maximal stable est aussi reduit. Les sections suivantes presentent plus en
detail la composante d'injection du couple en s'interessant a I'impact de la variation du gain Kti.
• La composante du ressort virtuel consiste en un second asservissement proportionnel
d'angle (gain Kra), mais avec une consigne differente de celle du regulateur de
position. Sa consigne est la trajectoire desiree (ce qui correspond a Tangle de repos du ressort virtuel de I'impedance, s'il y a lieu). Contrairement aux deux autres composantes, elle ne tient aucunement compte de la force mesuree.
La composante du ressort virtuel genere une commande de tension directement proportionnelle a I'erreur entre Tangle de repos et Tangle mesure, comme le ferait un ressort non-amorti de raideur proportionnelle a la raideur de I'impedance desiree. Consequemment, elle est utilisee lorsque I'impedance desiree comprend une raideur et son impact augmente avec ('augmentation de cette raideur. Contrairement a la composante d'injection de couple, la composante du ressort virtuel augmente I'impedance mecanique de sortie du systeme.
4.3. Modelisation du systeme en boucle fermee
Le modele theorique du systeme en boucle fermee permet de prevoir Tapport des trois gains et de, jusqu'a une certaine limite dictee par la precision du modele, predire le comportement du systeme. L'annexe B presente en detail le cheminement realise pour obtenir les equations presentees dans la presente section.
Le modele realise exprime I'admittance du systeme en boucle fermee :
^ = H(s) (4.11)
FL: Couple entre I'environnement et I'ADE [Nm]
H(s): Admittance theorique du systeme
H(s) tient compte de la non-colocation du capteur de couple (FL est different de Fr). Quelques
simplifications ont pu etre effectuees considerant que le modele du systeme en boucle fermee n'est pas utilise dans le controleur ou pour evaluer la stabilite du systeme. Les modeles utilises et leurs simplifications sont presentes au tableau 4.1. La modelisation du moteur a courant continu et du ressort interne de I'ADE ne presentent pas de defis particuliers; le ressort usine choisi a un comportement estime lineaire, soit sans phenomenes d'hysteresis durant le chargement et d'une raideur identique dans les deux sens de chargement (Legault, 2006). Les moteurs a courant continu sont quant a eux regulierement modelises dans la litterature.
Tableau 4.1 Simplifications apportees au modele
Modele
Mecanisme de I'ADE sans moteur realise par Marc-Antoine Legault (Legault, 2006)
Moteur a courant continu de I'ADE Loi de commande et electronique
Simplifications
Modele lineaire sans amortissement ou friction, la compliance du reducteur est negligee.
L'inductance du bobinage est negligee. La loi de commande, la carte d'alimentation du moteur et les capteurs sont consideres ideaux. La saturation de I'alimentation a 24 V et I'ARW ne sont pas inclus dans le modele.
Le reducteur harmonique genere plusieurs phenomenes, certains lineaires tels que les differentes inerties, frictions visqueuses et elasticites, mais aussi des frictions non-lineaires plus complexes (Peer et al, 2003). L'ADE comprend de nombreux roulements a quatre points de contact avec des effets de frictions lineaires (friction visqueuse) et non-lineaires (friction seche et de Stribeck).