HAL Id: tel-01752019
https://hal.univ-lorraine.fr/tel-01752019
Submitted on 29 Mar 2018
HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
Contribution à l’étude de la stabilité et stabilisation des
réseaux électriques industriels
Diane Leblanc
To cite this version:
Diane Leblanc. Contribution à l’étude de la stabilité et stabilisation des réseaux électriques industriels. Autre. Université de Lorraine, 2014. Français. �NNT : 2014LORR0368�. �tel-01752019�
AVERTISSEMENT
Ce document est le fruit d'un long travail approuvé par le jury de
soutenance et mis à disposition de l'ensemble de la
communauté universitaire élargie.
Il est soumis à la propriété intellectuelle de l'auteur. Ceci
implique une obligation de citation et de référencement lors de
l’utilisation de ce document.
D'autre part, toute contrefaçon, plagiat, reproduction illicite
encourt une poursuite pénale.
Contact : ddoc-theses-contact@univ-lorraine.fr
LIENS
Code de la Propriété Intellectuelle. articles L 122. 4
Code de la Propriété Intellectuelle. articles L 335.2- L 335.10
http://www.cfcopies.com/V2/leg/leg_droi.php
Université de Lorraine
Ecole Doctorale « Informatique - Automatique - Electrotechnique - Electronique - Mathématiques » Département de Formation Doctorale « Electrotechnique - Electronique »
THESE
Présentée àL'Université de Lorraine
En vue de l’obtention du grade de
DOCTEUR de l’Université de Lorraine
Spécialité : Génie Electrique par
Diane LEBLANC
CONTR)BUT)ON A L’ETUDE DE LA STAB)L)TE ET A LA
STABILISATION DES RESEAUX ELECTRIQUES INDUSTRIELS
Soutenue publiquement le 18 juillet 2014
Membres du Jury :
Rapporteurs : Mohamed MACHMOUM
Christophe SAUDEMONT
Examinateurs : Daniel HISSEL
Serge PIERFEDERICI Directeur de thèse : Bernard DAVAT
Co-directeur de thèse : Babak NAHIDMOBARAKEH
Thèse préparée au Groupe de Recherche en Electrotechnique et Electronique de Nancy
Laboratoire GREEN (Groupe de Recherche en Electrotechnique et Electronique de Nancy) Ecole Nationale Supérieure d'Electricité et de Mécanique – Université de Lorraine
2
Table des matières
INTRODUCTION GÉNÉRALE ... 4
Chapitre 1 MET(ODES D’ETUDE DE LA STAB)L)TE DES SYSTEMES ELECTR)QUES ... 8
1.1 Stabilité des systèmes électriques ... 9
1.1.1 Différents types de charges : vers une pénétration importante des électroniques de puissance ... 9
1.1.2 Différentes « natures » de stabilité et modèles associés ... 11
1.1.3 Causes d’instabilité ... 16
1.1.4 Couplage de plusieurs charges sur un même bus ... 21
1.2 Méthodes d'étude de la stabilité d'un système électrique... 23
1.2.1 Introduction... 23
1.2.2 Méthodes d’étude des systèmes non linéaires ... 25
1.2.1 Méthodes d’étude de stabilité des systèmes linéaires ... 31
1.3 Méthodes de stabilisation ... 37
1.3.1 Stabilisation passive ... 37
1.3.2 Stabilisation active ... 38
1.4 Conclusion ... 41
Chapitre 2 ETUDE DE STAB)L)TE D’UN RESEAU AC... 42
2.1 Système étudié ... 43
2.1.1 Structure du système étudié ... 43
2.1.2 Le redresseur commandé ... 44
2.2 Etude linéaire de la stabilité du système ... 60
2.2.1 Détermination du domaine de stabilité par la méthode des valeurs propres ... 60
2.2.2 Stabilité et résonance ... 63
2.3 Etude non linéaire de la stabilité du système ... 66
2.3.1 Simplification du réseau ... 66
2.3.2 Mise sous forme Takagi-Sugeno ... 67
2.3.3 Stabilité et bassin d'attraction ... 71
3
Chapitre 3 STABILISATION DU RÉSEAU ... 78
3.1 Commandabilité et stabilisabilité du réseau ... 79
3.1.1 Cas des systèmes linéaires ... 79
3.1.2 Cas des systèmes non linéaires ... 79
3.1.3 Stabilisabilité du système ... 81
3.2 Stabilisation du bus DC ... 84
3.2.1 Principe de la méthode ... 84
3.2.2 Validation de la méthode par simulation ... 85
3.2.3 Validation expérimentale de la méthode ... 90
3.3 Stabilisation du bus AC par un agent dédié ... 93
3.3.1 Description et modélisation de l’agent stabilisateur... 93
3.3.2 Stabilisation par approche petit signal... 95
3.3.3 Stabilisation par approche large signal ... 106
3.4 Conclusion ... 114
Chapitre 4 INTEGRATION DES STABILISATEURS DANS UN MICRO-RESEAU ... 116
4.1 Diminution du nombre de capteurs ... 117
4.1.1 Problème d'optimisation ... 117
4.1.2 Résultats expérimentaux ... 124
4.2 Placement des stabilisateurs sur le réseau... 126
4.2.1 Modélisation du micro-réseau avec les stabilisateurs ... 126
4.2.2 Stabilisation centralisée ... 131
4.2.3 Stabilisation décentralisée ... 142
4.2.4 Bilan ... 144
4.3 Conclusion ... 145
CONCLUSION GÉNÉRALE ... 146
Annexe A MODELE MOYEN D'UN REDRESSEUR TRIPHASE MLI... 148
Annexe B MODELE LINEARISE DU SYSTEME ETUDIE ... 151
Annexe C MODELISATION TAKAGI-SUGENO DU SYSTEME AVEC UN FILTRE L ... 154
INTRODUCTION GENERALE
4
INTRODUCTION GÉNÉRALE
De nos jours, les enjeux énergétiques deviennent de plus en plus importants. La qualité de l’énergie électrique et la lutte contre les pertes énergétiques sont un enjeu crucial pour les entreprises. En effet, une gestion de l’énergie efficace est source de gain de productivité et la maîtrise de la consommation électrique permet de faire des économies d’énergie et d’améliorer la performance énergétique des bâtiments. De plus, dans un monde où le numérique occupe une place croissante, et où l’équipement électrique joue un rôle incontournable réfrigération dans l’alimentation, éclairage et informatique dans le tertiaire, outillage et machines dans l’industrie ou l’artisanat… la compétitivité des entreprises dépend de la qualité de l’énergie électrique : les surcoûts peuvent provenir :
- de coupures de courant et des creux de tensions en termes de pertes de données et de pertes d’exploitation ;
- des harmoniques en termes de confort (effet Flicker...), de productivité et de coût de fonctionnement ;
- des pertes énergétiques dues à des équipements défectueux ou vieillissants.
Les réseaux électriques industriels sont le prolongement du réseau de distribution auquel ils se raccordent. Les sites industriels sont généralement composés de bureaux, d’usines de production, voire des deux. Ils sont raccordés au réseau principal via un ou plusieurs transformateurs. Certaines charges sur le réseau sont sensibles et nécessitent d’être constamment alimentées par le réseau principal. On retrouve dans ce type de charges les baies de serveurs informatiques, les lignes de production, certains équipements dans les hôpitaux… Dans ces réseaux, on retrouve essentiellement l’électronique de puissance dans les alimentations à découpage, les moteurs alimentés par des variateurs de vitesse, les ASI en amont des charges sensibles et les compensateurs d’énergie. Aujourd’hui, les nouveaux convertisseurs sont de plus en plus propres et atteignent des facteurs de puissance proches de 1 grâce à la commande par modulation de largeur d’impulsion ML) . )ls permettent de réduire la part de puissance réactive du système ainsi que les harmoniques, afin de réaliser des économies d’énergie. C’est pourquoi leur utilisation devrait donc continuer à croître.
Néanmoins, mettre un très grand nombre de convertisseurs d’électronique de puissance sur un réseau n’est pas anodin. En effet, ils peuvent interagir entre eux si certaines précautions ne sont pas prises. Dans un réseau où est présent un grand nombre de convertisseurs, il est essentiel de ne pas voir chaque élément de manière isolée mais également comme un ensemble. Dans le cas contraire, des équipements fonctionnant correctement seuls pourraient être perturbés une fois connectés entre eux.
Parmi les interactions susceptibles d’apparaître, on retrouve les problèmes de stabilité du système pris dans sa globalité. Cette problématique est bien connue pour les systèmes DC et AC. Dans les réseaux de transport d'électricité, les problèmes de stabilité traités sont ceux causés par
INTRODUCTION GENERALE
5
l'écart entre puissance produite et puissance demandée. De nombreux systèmes ont été développés pour diminuer ces risques depuis de nombreuses années, tels que les différents FACTS (Flexible Alternating Current Transmission System). Ce sont des équipements d'électronique de puissance d'appoint utilisés pour :
- contrôler la répartition des charges dans le réseau en améliorant la capacité de transit et en réduisant les pertes ;
- contrôler la tension en un point ou assurer la stabilité dynamique des réseaux de transmission d'électricité et des groupes de productions qui y sont connectés ;
- filtrer certains harmoniques et améliorer la qualité de l’électricité.
De nos jours, de gros efforts de recherche sont faits sur la thématique des micro-réseaux. Le phénomène d'instabilité étudié est plutôt celui du fonctionnement des réseaux en mode îloté. L'une des particularités de ce type de réseau est que la puissance disponible est limitée.
Sur les micro-réseaux industriels, les problèmes de stabilité sont causés par les convertisseurs électroniques de puissance eux-mêmes. Le phénomène d'instabilité n'est pas un problème classique de limitation de puissance dû à un mauvais dimensionnement du réseau. L'instabilité étudiée ici est directement liée à la bonne performance des régulateurs, qui tend à rendre la puissance consommée par les charges indépendantes de la tension d'entrée, tant que les régulateurs restent dans leur zone de contrôlabilité. Ainsi, en fonction des composants du réseau, il faut veiller à ne pas dépasser une certaine puissance pour chaque charge régulée au risque de voir le réseau osciller fortement et de manière incontrôlable. Cette limite dépend fortement de la structure du réseau et de ses composants.
L’objectif premier de ces travaux de thèse est d'étudier différents facteurs contribuant au départ de l'instabilité sur un micro-réseau alimenté par le fournisseur d'électricité devant pouvoir fonctionner en mode îloté. Il est composé de charges continues alimentées par des redresseurs commandés. Le second objectif est de proposer une solution pour repousser la limite de stabilité. La figure suivante présente l'architecture type du système étudié dans cette thèse.
Source1
Convertisseur
AC/DC
Charges
Charges AC
Charges DC
Bus AC
Bus DC
Source2
INTRODUCTION GENERALE
6 Ce réseau peut être constitué d’une ou plusieurs sources de tension qui alimentent un bus AC commun. Différents types de charges sont connectées au bus AC telles que des charges AC simples ou des convertisseurs AC/DC qui alimenteront eux-mêmes une ou plusieurs charges DC.
L'instabilité peut être maîtrisée en agissant sur différents équipements du micro-réseau : la source, le bus AC, le convertisseur AC/DC, le bus DC et les charges. Les travaux présentés ici ont exploré deux axes de stabilisation : par le bus AC et par les charges DC elles-mêmes.
Le contexte de l'étude est précisé dans le premier chapitre. Celui-ci vise dans un premier temps à mieux se repérer sur l'étude de la stabilité des réseaux AC. Il est complété par un état de l'art sur les principaux outils d'étude de la stabilité. Les phénomènes d'instabilité rencontrés sur les réseaux, même de grande taille, sont présentés (stabilité rotorique, fréquentielle,...) mais on s'est plus attardé sur les phénomènes de stabilité liée à la dynamique des systèmes, tels que Lyapunov les a définis. D’abord, des méthodes d'étude petit-signal, dont le domaine de validité est limité au voisinage du point de fonctionnement, sont données. Pour apporter une dimension quantitative de la stabilité, des outils large-signal sont ensuite présentés. Enfin, les facteurs aggravant la stabilité déjà identifiés et largement étudiés dans la littérature sont détaillés dans ce chapitre.
Le deuxième chapitre décrit le système étudié qui est utilisé dans les chapitres 2 et 3. Ce système est modélisé en prenant en compte l'ensemble des paramètres de régulation pour bien mettre en évidence l'impact prépondérant de la commande sur la stabilité du système. Ce modèle est ensuite simplifié sous des hypothèses contraignantes concernant la stabilité du système pour pouvoir utiliser des outils plus complexes. Deux lois de commande sont comparées pour évaluer leur impact sur la stabilité du système. Les études de stabilité petit-signal sont utilisées pour connaître les paramètres affectant le plus la stabilité du système, et les études large-signal sont plutôt utilisées à des fins de quantification des perturbations que peut subir le système sans rendre le système instable.
Après avoir déterminé les causes possibles d'instabilité de ce système, le chapitre 3 se focalise sur les moyens de diminuer le phénomène en repoussant la limite de stabilité. Nous proposons de mettre au point un stabilisateur indépendant sur le modèle du FACTS et un stabilisateur qui agit directement par les charges du réseau. Plusieurs lois de stabilisation sont utilisées, basées soit sur les retours d'état petit-signal, soit sur des outils large-signal. Ce stabilisateur est ensuite testé sur un banc expérimental avec différentes lois de commande.
Enfin, le dernier chapitre se focalise sur l'intégration des stabilisateurs sur un micro-réseau. L'un des problèmes dans les micro-réseaux est la transmission des données mesurées jusqu'au centre de traitement puisque cela nécessite des moyens fiables de transmission de données et peut engendrer des retards entre la mesure effectuée et l'ordre de commutation transmise au convertisseur. Pour pallier cela, une des solutions est de rapprocher les mesures nécessaires à la stabilisation le plus près possible du convertisseur comme nous le proposons dans ce chapitre. Le deuxième problème inhérent des micro-réseaux est le choix du nombre et du placement des stabilisateurs. Deux visions peuvent être confrontées : soit les stabilisateurs sont commandés
INTRODUCTION GENERALE
7
par un "calculateur" central, auquel cas ils doivent impérativement communiquer, soit ils agissent indépendamment les uns des autres. Dans le premier cas, cela laisse l'opportunité de diminuer le nombre de stabilisateurs en optimisant le placement pour répondre à des critères fixés (coût, bilan énergétique, ....).
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
8
Chapitre 1
METHODES D’ETUDE DE LA STABILITE DES SYSTEMES
ELECTRIQUES
Dans la thématique qu'est l'étude des réseaux électriques alternatifs, un aperçu de la diversité de la notion de stabilité est donné. Il permet de se retrouver parmi les différentes problématiques liées à chaque type de réseau (transport, distribution, utilisateur...) et les principaux outils associés. Si l'étude des réseaux de distribution a fait l'objet de nombreuses études et continuent à être étudiés puisque ces réseaux fonctionnent, de plus en plus, près de leur limite, beaucoup moins de travaux ont concerné les réseaux côté utilisateur. Dans cette thèse, c'est à ce type de réseaux que nous nous intéressons, plus particulièrement aux réseaux de plus petite taille, côté utilisateur.
Une présentation générale des réseaux de type industriels est donnée. Elle résume ce qui les caractérise, de quoi ils sont constitués et comment ils devraient évoluer à court et à plus long termes. L'une des évolutions amenée par les progrès faits dans le domaine de l'électronique de puissance est le nombre de charges régulées qui ne cesse d'augmenter avec des boucles de régulation de plus en plus rapide. Dans ce contexte, on retrouve de plus en plus de charges alimentées par des redresseurs commandés par MLI (Modulation de Largeur d'Impulsion). Bien que l'utilisation de ces convertisseurs soit avantageuse pour le bon fonctionnement des charges, et du réseau, en préservant sa bonne qualité, ils introduisent en même temps des problèmes de stabilité à leur point de connexion. Ces nouveaux problèmes ne sont pas dus à la limitation de la puissance disponible sur le réseau.
Après avoir défini mathématiquement la notion de stabilité, une vue d'ensemble des outils d'analyse de la stabilité est donnée. Les outils se divisent en deux grandes classes selon que les équations du système sont linéaires ou non linéaires. Les outils non linéaires donnent un cadre général aux étude de stabilité. De leur côté, les outils linéaires permettent de conclure sur la stabilité ”petit-signal” en utilisant des outils de nature différente : certains s'orientent vers une analyse globale du système alors que d’autres se limitent à l'étude des interactions entre différentes sous-parties.
Les techniques disponibles dans la littérature pour augmenter la stabilité des systèmes électriques sont ensuite présentées. Celles-ci sont de deux formes : passives ou actives. Les méthodes passives consistent à jouer sur la structure des filtres d’entrée. Les méthodes actives, quant-à elles, mettent en place une rétroaction sur la commande afin de diminuer l’impact déstabilisant des charges à puissance constante (CPL) sur le réseau.
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
9
1.1
Stabilité des systèmes électriques
1.1.1
Différents types de charges : vers une pénétration importante des
électroniques de puissance
Le comportement d’un réseau électrique lors de phénomènes transitoires dépend de chacun de ses constituants. )l faut donc connaître le comportement de chacun d’eux pour prédire celui du système global. Une architecture typique d'un réseau industriel est donnée sur la Figure 1-1 et les constituants [MET97] sont détaillés ci-après.
Figure 1-1 : Architecture classique d'un réseau industriel
Charges passives
)l s’agit des consommateurs de puissance tels que l’éclairage et le chauffage. Ces charges peuvent être linéaires ou non et sont représentées sous la forme d'une puissance active et d'une puissance réactive [KUN94]. La Figure 1-2 donne la représentation générale d'une charge passive en un nœud particulier du réseau.
Sources d’alimentation
- Fournisseur d’électricité (EDF…)
Convertisseurs statiques
-Alimentation Sans Interruption (ASI)
Charges
- Machines tournantes
- Chauffage, éclairage, prises…
- Charges DC : télécom, éclairage de
Zo ne d’étud
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
10
Nœud de la charge Pc Qc
Figure 1-2 : Représentation générale d'une charge passive
La dépendance en tension de ces charges est traditionnellement représentée par le modèle exponentiel donné par :
= et = (1.1)
Avec la tension nominale, la tension au nœud de connexion, et les puissances actives et réactives nominales, et les coefficients caractéristiques de la charge.
Transformateurs et liaisons
Les transformateurs, les lignes et les câbles qui assurent le transit de puissance de la source vers la charge sont caractérisés par leur impédance. Ces éléments de liaison peuvent être décisifs lors des transitoires : les forts appels de courant peuvent provoquer des chutes de tensions s’avérant critiques pour d'autres charges placées au même nœud. Dans les réseaux industriels, les longueurs de câbles n’excèdent pas quelques dizaines, voire centaines de mètres. On les représente par une impédance de type RL.
Machines tournantes
Dans les réseaux industriels, les machines synchrones sont principalement des groupes électrogènes qui alimentent les charges sensibles lors d’une panne du réseau de distribution.
Les machines asynchrones représentent quant-à elles la plus grande part des charges sur un réseau industriel car elles sont robustes, fiables et économiques. Elles peuvent représenter jusqu’à % de la consommation en puissance d’un site. Elles sont utilisées à des fréquences fixes ou variables. Actuellement, la fréquence variable se répand car ce type de convertisseur permet de faire des économies d’énergie en particulier pour des applications à couple variable ventilateurs, pompes, compresseurs… . Petit à petit, les machines à fréquence variable remplacent les machines à fréquence fixe.
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
11
Charges électronique de puissance
Un grand nombre de récepteurs entrent dans cette famille de charges. On retrouve par exemple les cuves à électrolyse, les moteurs à vitesse variable, le chauffage à gradateur et de nombreux équipements informatiques.
De manière générale, les équipements basés sur l’électronique de puissance sont très sensibles aux variations de tension et de fréquence. Cela les rend particulièrement vulnérables aux problèmes de stabilité du réseau.
Sources d’énergie renouvelable
A l’heure actuelle, peu de sites industriels sont directement alimentés par des énergies renouvelables. Pourtant, une des réponses aux enjeux énergétiques pourrait être le développement des microgrids. Ces réseaux sont basés sur une production d'électricité décentralisée sur chaque site où les différentes sources sont interconnectées par des convertisseurs de puissance. On peut imaginer que ce type de source pourrait connaître un réel essor.
1.1.2
Différentes « natures » de stabilité et modèles associés
La stabilité est le fait qu'un système parvienne à maintenir un point d'équilibre après une perturbation. Cette perturbation peut être causée par un changement progressif ou non des charges du système. Les facteurs déterminants pour la stabilité d'un système sont les caractéristiques des charges ainsi que leurs lois de commandes.
1.1.2.1 Notions de base sur la stabilité des réseaux (Kundur)
L’étude de la stabilité d’un réseau peut se diviser en deux parties : la stabilité statique et la stabilité dynamique.
La stabilité statique est l’étude des régimes d’équilibre du système. Cette étude permet de connaître les niveaux de tension et les transits de puissance à travers l’ensemble des bus du système. Elle est utilisée principalement dans la phase de dimensionnement des éléments passifs du réseau câbles, protections… .
La stabilité dynamique est l’étude de l’évolution dynamique du système suite à une perturbation quelconque, petite ou grande. Les petites perturbations ont pour origine, par exemple, l'ajustement constant de la puissance consommée par les charges, entrainant un ajustement permanent du système. Les grandes perturbations sont généralement engendrées par des courts-circuits ou l'arrêt d’une charge suite à l’isolement d’un élément en défaut.
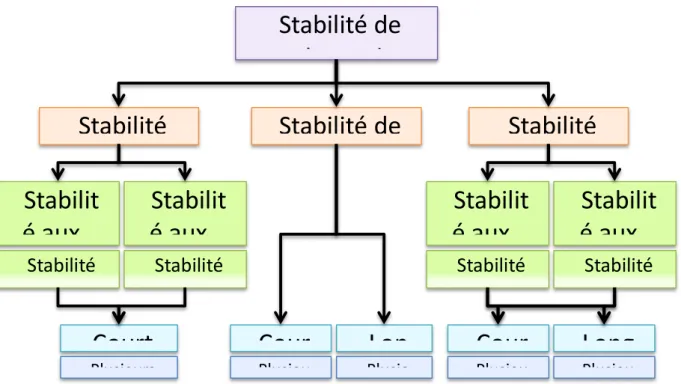
La stabilité dynamique des systèmes peut encore être subdivisée suivant le graphique de la Figure 1-3.
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
12
Figure 1-3 : Différentes stabilités dynamiques dans un réseau électrique
o La stabilité angulaire est la capacité d’interconnecter sur un réseau plusieurs sources tout en garantissant le synchronisme. C’est un problème propre aux machines synchrones alimentant les réseaux. Son étude est très répandue dans la littérature puisque qu’il s’agit d’un problème ancien [KUN ], [AND ]. Plus récemment, cette problématique est réapparue avec le développement des microgrids où l'on connecte dans un réseau isolé différentes sources d’énergie interfacées chacune par un convertisseur de puissance [BAR08], [SHI10], [MAJ10].
o La stabilité en fréquence est la capacité d'un système à maintenir sa fréquence proche de sa valeur nominale suite à une perturbation sévère menant à un important déséquilibre entre la puissance produite et consommée.
o La stabilité de tension est la capacité d'un système à maintenir un même niveau de tension sur tous les bus soit sous les conditions normales de fonctionnement, soit après une perturbation. L’instabilité de tension se manifeste par la chute progressive de la tension du système et sa perte de contrôle après une perturbation.
L'un des principaux facteurs d'instabilité en tension sur un réseau est lié à la chute de tension qui survient lors d'une importante variation de puissance (supérieure ou égale à la puissance nominale du système). En effet, cela provoque un chargement excessif des éléments passifs du réseau (filtre d'entrée des systèmes, impédances liées aux longueurs de câbles...) et
Stabilité de
systèmes de
Stabilité
’
Stabilité de
Stabilité
Stabilit
é aux
Stabilit
é aux
Stabilit
é aux
Stabilit
é aux
Stabilité
Stabilité
Stabilité
Stabilité
Court
Cour
Lon
Cour
Long
Plusieu
Plusieu
Plusieu
Plusie
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
13
engendre des pertes réactives élevées, ce qui diminue la puissance active transmissible par le réseau.
1.1.2.2 Différents modèles
L'analyse et la conception des réseaux électriques s'appuient sur des modèles ayant chacun leur domaine de validité. On distingue deux grands types de modèles : les modèles statiques et les modèles dynamiques.
Modèles statiques
Les modèles statiques ont été utilisés depuis de nombreuses années afin de connaître la répartition des charges sur un réseau. C’est la 1ère étude qui doit être réalisée lors de la
conception d’un réseau afin de dimensionner correctement la plupart des éléments passifs. Ces modèles sont basés sur la modélisation load flow (aussi appelée power flow) [AND08].
Cette modélisation, très répandue pour l'analyse des réseaux de distribution électrique, permet de déterminer l'état du réseau en fonction de la connaissance des charges et des sources connectées. Elle est basée sur le principe que les charges sont en régime permanent et que les sources de tension sont directes équilibrées.
Modéliser un réseau de cette manière permet d'obtenir en régime établi : - le profil de tension en chaque nœud,
- la répartition des courants dans le réseau,
- le bilan de puissance et donc le rendement global de l’installation.
Ce modèle donne une image exacte de la répartition des puissances (active et réactive) sur le réseau. La non prise en compte des régimes transitoires permet d'utiliser des modèles de charge grossiers, et de modéliser des réseaux de très grandes tailles sans nécessité des puissances de calcul trop importantes [SAB07a], [SAB07b].
La méthode de modélisation load flow n'est pas donnée dans les détails ici car celle-ci est largement développée dans de nombreux ouvrages concernant l'étude des réseaux [SAB07], [BAR98], [WEE12].
Cependant, la multiplication des électroniques de puissances sur le réseau conduit à réduire le domaine d'application des modèles statiques car les dynamiques introduites deviennent non négligeables.
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
14
Modèles dynamiques o Modèle topologique
Un convertisseur de puissance est composé essentiellement d'interrupteurs. C'est le jeu d'ouverture et de fermeture de ces interrupteurs qui permet la transformation des courants et tensions. Le comportement de ce type de système est donc fortement discontinu : il existe autant de représentations d'état de ces systèmes que de combinaisons possibles des interrupteurs.
L'avantage du modèle topologique est qu'il donne une représentation exacte du convertisseur. En contrepartie de cette grande précision, le temps de calcul peut s'avérer particulièrement long. Il est donc difficilement utilisable dès que l'on modélise plusieurs convertisseurs.
o Modèle moyen
Dans une démarche d'analyse système, il n'est pas nécessaire d'avoir un modèle trop précis de chaque composant du réseau. On utilise un modèle plus grossier qui permet de retrouver le comportement dynamique du convertisseur sans détailler chaque état de fonctionnement.
Ainsi, la modélisation moyenne d'un convertisseur permet de transformer un modèle discontinu en un modèle continu et invariant que l'on peut utiliser pour la mise au point de lois de commande ou pour les analyses de stabilité. Le première modélisation moyenne pour un convertisseur de puissance a été proposée par Middlebrook [MID76].
Modèle moyen classique
Le modèle moyen classique utilise la moyenne glissante : on effectue la moyenne du signal sur une fenêtre de temps T qui se déplace au cours du temps souhaité (Figure 1-4). De cette façon, on récupère la composante continue du signal. Appelons la valeur moyenne de la composante continue du signal (indice ) .
f(t)
t
t-T T
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
15
Cette moyenne se calcule grâce à la relation :
= ∫ ( )
−�
(1.2)
L'une des propriétés de la moyenne glissante est donnée par :
= (1.3)
D'après cette propriété, le comportement dynamique moyen d'une fonction revient à étudier le comportement dynamique de la moyenne de . Ceci permet de valider l'utilisation des modèles moyens pour les études dynamiques des systèmes.
Modèle moyen généralisé
Dès que l'on étudie des variables d'état discontinues ou ayant une valeur moyenne nulle (c'est le cas des variables sinusoïdales), le modèle moyen classique n'est plus utilisable. Il est donc complété par le modèle moyen généralisé afin de prendre en compte le comportement harmonique. La dynamique globale d'une variable est décrite par le comportement dynamique des coefficients de Fourier de la variable complexe sur une période T :
= ∑ � . − �
+∞ =−∞
(1.4)
avec � les coefficients de Fourier complexes de rang et = �⁄ . Ces coefficients sont calculés par une moyenne glissante :
� = ∫� � − � �
−�
(1.5)
Cette modélisation permet donc de prendre en compte l'évolution temporelle des valeurs moyennes des harmoniques. Le modèle obtenu fait ainsi le lien entre les grandeurs moyennes continues et les grandeurs moyennes alternatives [SAN90].
Ce modèle utilise les deux propriétés suivantes : � = − � + � (1.6) et : . = ∑ − +∞ =−∞ (1.7)
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
16
La première de ces propriétés est la version harmonique de l'équation (1.3). Lorsque = , on retrouve le modèle moyen classique. Généralement, l'utilisation de ce modèle se limite au fondamental afin de lier les grandeurs continues et les grandeurs alternatives [EMA04a], [EMA04b]. On parle de développement au premier harmonique. Le développement au premier harmonique est suffisant pour l'étude de la stabilité d'un système puisqu'elle est liée à l'évolution de l'énergie stockée dans le système.
1.1.3
Causes d’instabilité
Les phénomènes électriques qui influencent la stabilité d'un réseau sont généralement liés à des variations de puissance. Naturellement, toutes les perturbations liées à l'exploitation d'un réseau peuvent devenir source d'instabilité du fait des impacts de tension ou de courant qu'ils produisent. Néanmoins, d'autres causes plus "structurelles" peuvent augmenter les risques de départs d'instabilités. Ainsi, les charges à puissance constante sont susceptibles de donner naissance à une instabilité, tout comme les convertisseurs ayant un filtre d'entrée LCL. Enfin, l'interconnexion de plusieurs charges sur un même bus peut aussi générer des instabilités.
1.1.3.1
Perturbations réseau
Un réseau électrique peut subir une grande variété de perturbations : - variations de charges
- manœuvres d’équipements - déclenchements de charges - courts-circuits.
Ces phénomènes physiques sont caractérisés par des fréquences et constantes de temps diverses. Afin de faciliter les calculs et la modélisation, les phénomènes sont classifiés (Figure 1-5 de telle sorte qu’à chaque classe corresponde un modèle et des outils d’analyse mathématique. Phénomènes physiques 1MHz 100kHz 10kHz 1kHz 100Hz 10Hz 1Hz 10-1 Hz 10-2 Hz 10-3 Hz 10-4 Hz 10-5 Hz 10-6s 10-5 s 10-4 s 10-3 s 10-2 s 10-1 s 1s 10s 102 s 103 s 104 s 105 s Tenue en fréquence Tenue en tension Oscillation rotorique Ferrorésonance Court-circuit Surtension de manoeuvre Foudre
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
17
Dans cette thèse, nous nous intéressons aux réseaux connectés à un grand nombre de convertisseurs électroniques de puissance. Les phénomènes que nous étudions sont ceux liés aux ajustements de puissance, suite à l'évolution de la puissance, à la connexion/déconnexion d'une charge ou à des courts-circuits. Toutes ces perturbations sont de l'ordre de quelques millisecondes et autorisent l'utilisation d'un modèle moyen au premier harmonique. C'est ce modèle qui est utilisé dans la suite de ce mémoire.
1.1.3.2 Charges à puissance constante
L'amélioration des composants semi-conducteurs a permis d'augmenter la rapidité de commutation des interrupteurs qui constituent les convertisseurs de puissance. Grâce à cela, les techniques ont évolué vers différentes commandes à modulation de largeur d'impulsion (MLI). L'utilisation de celles-ci a permis de rendre les régulateurs plus rapides et d'améliorer la qualité de l'énergie transmise. La combinaison d'un courant de sortie constant et d'une tension parfaitement régulée induit à la sortie du convertisseur une puissance constante. Si on tient compte de l'efficacité de la conversion de puissance réalisée par le convertisseur, on déduit que la puissance à l'entrée du convertisseur est également constante. De plus en plus de charges se comportent de cette manière et sont appelées CPL (Constant Power Loads). Parmi ces charges, on retrouve les associations onduleur - actionneur et variateur de vitesse - moteur électrique.
Les problèmes d'instabilité causés par les CPL sont particulièrement étudiés pour les réseaux DC depuis de nombreuses années [EMA99], [EMA06], [RAH09].
Un convertisseur à puissance constante est représenté sur la Figure 1-6. Le courant consommé est de la forme = / , terme qui introduit une forte non linéarité dans la représentation mathématique du système.
vs (Ls, R) v C is + - = Filtre Convertisseur
Figure 1-6 : Réseau DC alimentant une CPL
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES 18
V
i
R
CPLP/i
V
oi
oFigure 1-7 : Courbe caractéristique d'une CPL
L'approximation affine autour de tout point d'équilibre donne la relation (1.8). On peut donc considérer que la charge à puissance constante se comporte comme une résistance négative :
= − . (1.8)
avec > la pente de la tangente à la courbe. (1.9)
Dans un premier temps, on va à expliquer le phénomène d'instabilité lié aux charges à puissance constante de manière intuitive à l'aide de la Figure 1-8.
Notons la tension aux bornes de la capacité et la tension aux bornes de la CPL. Le système représenté Figure 1-6 est à l’équilibre si les tensions = − . − . . et = sont égales. On cherche à savoir si lorsqu’on s’écarte d’un point d’équilibre, le système revient au même point dans deux cas de figures différents (points A et B).
Dans un 1ertemps, considérons le point A. Si on s’écarte de ∆ > , alors les tensions et
se décalent de ∆ et ∆ avec + ∆ > + ∆ . Grâce à sa régulation, la puissance de charge est maintenue, mais l'équilibre source/charge est rompu. La source va donc tenter de s'adapter aux nouvelles conditions : va diminuer, donc va augmenter et s'écarter encore plus du point d'équilibre. En répétant ce raisonnement, on déduit que le système ne reviendra pas à son point d'équilibre. On dit qu'il est asymptotiquement instable.
Suivons la même démarche avec le point B. Si on s’écarte de ∆ > , alors les tensions et se décalent telles que + ∆ < + ∆ . Pour adapter les tensions, la tension de source doit augmenter, donc va se rapprocher du point d'équilibre jusqu'à l'égalité des deux tensions
et . On dit que le système est asymptotiquement stable.
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES 19
v
sv
i
P
oA
B
Δi
Δi
Δv
1Δv
2v
2=P
o/ i
v
1=v
s-R.i
s-L
s.
ω.i
sΔv
2Δv
1C
Figure 1-8 : Stabilité d'une charge CPL
La démonstration faite ici porte sur des réseaux continus et alternatifs monophasés. Elle se généralise aisément aux charges à puissance constante des réseaux alternatifs triphasés. Des travaux sont menés pour les réseaux alternatifs mais la littérature à ce sujet est plus récente et moins vaste [MOL08a], [MOL08b].
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
20
1.1.3.3
Filtre LCL
Traditionnellement, les redresseurs à MLI ont un filtre d'entrée composé d'une inductance. Pour améliorer le filtrage des harmoniques de courant autour de la fréquence de découpage, il suffit d'augmenter la valeur de l'inductance. L'action du filtre sur les courants d'entrée ralentit le temps de réponse du système et le rend moins efficace.
La solution apportant une alternative plus intéressante est l'utilisation de filtres LCL. La Figure 1-9 donne le schéma équivalent monophasé d'un redresseur MLI avec un filtre LCL. Ces filtres permettent d'obtenir un meilleur filtrage pour des valeurs de composants plus petites, et sans ralentir le système.
Vg Lg Vc C f ir is Cdc L Filtre Bus DC Redresseur Vr Vcneutre Vgneutre Vrneutre
Figure 1-9 : Schéma équivalent monophasé d'un redresseur commandé et de son filtre d'entrée LCL
Dans [LIS02] est défini le modèle d'un filtre LCL en entrée d'un redresseur commandé dans le cas où le courant régulé est le courant du réseau . Le modèle du filtre LCL est représenté sur la Figure 1-10. La fonction de transfert = ⁄ donné par l'équation (1.10) permet de vérifier l'efficacité du filtre contre les ondulations liées à la fréquence de découpage :
= = ² ++ (1.10) avec = et = √ + . . (1.11) _ + _ + _ + 1 1 1
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES 21
M
agni
tude
(
dB
)
10-1 100 101 102 103 104 105 -50 -40 -30 -20 -10 0 10 20 30 40 Fréquence [Hz] filtrage L (100µH) filtrage LCL (10µH, 1100µF)Figure 1-11 : Diagrammes de Bode d'un filtre L et d'un filtre LCL
Aux basses fréquences, le comportement du filtre LCL est identique à celui d'un filtre L (Figure 1-11), mais le filtrage hautes fréquences est bien meilleur au delà de la fréquence de coupure désirée. Cela confirme que la qualité du courant s’améliore si on utilise un filtre LCL à inductance équivalente égale.
Comparé au simple filtre L, le filtre LCL a deux pôles et deux zéros supplémentaires dans la fonction de transfert en boucle ouverte du système. Il est important de prendre en considération les problèmes de stabilité introduits dès la phase de conception des convertisseurs afin de garantir des marges de stabilité suffisantes. Le modèle (1.10) est couramment utilisé pour dimensionner le filtre [LIS05] et pour déterminer des moyens de stabilisation. Les principaux axes de stabilisation sont présentés au paragraphe 1.3.
1.1.4
Couplage de plusieurs charges sur un même bus
Un réseau électrique, qu'il soit alternatif ou continu, est généralement composé de plusieurs charges connectées en parallèle sur un bus commun. Les modes de fonctionnement d'un tel réseau incluent l'ensemble des modes propres à chaque élément. Les équipements interconnectés peuvent aussi échanger physiquement de l'énergie, ce qui peut créer d'autres modes croisés, appelés modes de couplage. C’est ainsi que deux charges stables si elles sont prises seules peuvent devenir instables lorsqu'elles sont placées en parallèle [SUN08].
Actuellement, cette problématique se manifeste peu sur les réseaux industriels compte tenu du nombre de charges passives, et donc dissipatives d'énergie. Mais l'augmentation du nombre d'équipements régulés sur le réseau va parallèlement ajouter de nouvelles dynamiques, et donc
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
22
accroître les risques d'instabilité qui en découlent. La seule manière de garantir l'absence d'interactions entre les équipements est de mener une étude système qui englobe l'ensemble du réseau.
La stabilité des systèmes alternatifs monophasés a été étudiée pour des réseaux composés de charges régulées à puissances constantes en parallèle avec des charges à tension constante [EMA06]. On peut montrer facilement que la limite de stabilité d'un système simple dépend à la fois des propriétés des charges à puissance constante, mais aussi des charges à tension constante.
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
23
1.2
Méthodes d'étude de la stabilité d'un système électrique
1.2.1
Introduction
1.2.1.1
Définition mathématique de la stabilité
Tout système dynamique peut être écrit sous la forme = , , avec = [ … ] le vecteur d'état, le vecteur des entrées du système et une fonction scalaire de la forme = [ … ].
Cette représentation d'état permet de modéliser un système dynamique en utilisant des variables d'état. Elle peut être linéaire ou non, continue ou discrète. Elle permet de déterminer l'état du système complet à n'importe quel instant futur si l'on connaît l'état à l'instant initial et le comportement des variables extérieures qui influent sur le système. Cette modélisation n’est pas unique car elle dépend des grandeurs d’état que l’on a choisies. Nous allons utiliser ce type de modélisation afin de réaliser toutes les analyses de stabilité.
Les définitions de la stabilité des systèmes au sens de Lyapunov sont celles données par Slotine [SLO91].
Lorsque le système est à l'équilibre, les dérivées des variables d'état sont égales à zéro :
∀ , = = , (1.12)
où le couple , désigne le vecteur d’état au point d'équilibre considéré.
Le point d'équilibre , est stable au sens de Lyapunov si, lorsque l'état du système est déplacé dans un voisinage de à l'instant , il reste dans un voisinage de .
Une façon plus formelle d'écrire cet énoncé est la suivante :
∀ > , ∃ , ∶ ‖ − ‖ < , → ‖ − ‖ < , ∀ > (1.13)
Il faut noter que la stabilité est dite globale si cette affirmation est vraie pour toute condition initiale . Cette définition n'implique pas forcément que le système retourne au point d'équilibre initial, comme on peut le voir sur la Figure 1-12.
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
24
Figure 1-12 : Stabilité d'un point d'équilibre
Un point d'équilibre est asymptotiquement stable s’il vérifie l'équation (1.13) et si le système revient au point d'équilibre initial. Cela revient à ajouter la condition :
���
→∞‖ − ‖ = (1.14)
La Figure 1-13 représente la forme générale de la dynamique d'un système asymptotiquement stable.
Figure 1-13 : Stabilité asymptotique d'un point d'équilibre
Le point d'équilibre est dit globalement asymptotiquement stable si cette condition ne dépend pas du point de fonctionnement initial.
En pratique, la stabilité asymptotique est la propriété généralement recherchée.
1.2.1.2
Aperçu des méthodes d'étude de la stabilité
Il n'est pas possible de lister toutes les méthodes disponibles dans la littérature qui permettent d'étudier la stabilité d'un système électrique. Néanmoins, la plupart d'entre elles sont basées sur les critères fondamentaux donnés Figure 1-14.
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
25
Figure 1-14 : Différentes méthodes d'étude de la stabilité d'un système
Les méthodes d'étude de la stabilité d'un système se décomposent en deux catégories : les méthodes linéaires et les méthodes non linéaires. Pour chacune d'elle, des méthodes différentes existent mais chaque branche n'est pas cloisonnée : il est possible d'utiliser les outils non linéaires sur les systèmes linéaires et d'appliquer les outils linéaires aux systèmes non linéaires préalablement linéarisés.
1.2.2
Méthodes d’étude des systèmes non linéaires
La quasi-totalité des systèmes dynamiques réels possède des caractéristiques non-linéaires. L'étude de la stabilité de tels systèmes peut être faite avec des outils particuliers. Les définitions et théorèmes donnés dans cette partie ont été définis par Lyapunov et repris par Slotine [SLO91].
1.2.2.1
Stabilité au sens de Lyapunov : méthode directe
Le principe intuitif de cette méthode est le suivant : si l'énergie totale d'un système décroît avec le temps, alors le système tend à se ramener vers un point d'équilibre stable. Cette fonction énergie, dans la théorie de la stabilité, est formalisée à l'aide des fonctions dites de Lyapunov. La méthode consiste donc à trouver une fonction représentative de l'énergie du système ayant les propriétés données dans la définition suivante.
Analyse de
Méthodes
Méthodes
Algébriqu
Temporell
Fréquenti
Théorie
Théorie
Critère de
Routh Hurwitz
Analyse
modale
Facteur de
participation
Sensibilité
Critère de
Nyquist
Critère de
Middlebrook
Théorème
des petits
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
26
Définition 1
Soit ≠ un point d'équilibre. Une fonction de Lyapunov est une fonction telle que : i. est une fonction définie positive ((1.15),(1.16)):
= (1.15)
et > ≠ (1.16)
ii. existe et est une fonction semi-définie négative ((1.17), (1.18)):
= (1.17)
et ≠ (1.18)
Une interprétation pratique de cette définition est de trouver une fonction qui puisse être assimilée à un potentiel. La principale difficulté réside justement dans l'obtention de cette fonction de Lyapunov, car il n'existe pas de méthode générale permettant d'obtenir une telle fonction pour tout système. En pratique, différentes fonctions de Lyapunov sont proposées en fonction de la "classe" du système étudié.
La fonction de Lyapunov est la base de l'étude de la stabilité des systèmes par la méthode directe de Lyapunov.
Théorème 1 : stabilité locale
Si dans un domaine ∈ , il existe une fonction de Lyapunov , alors le point d'équilibre est stable. Si en plus, est localement définie négative (ie = et <
≠ ), alors est localement asymptotiquement stable.
Théorème 2 : stabilité globale
Si dans , il existe une fonction de Lyapunov telle que → ∞ quand ‖ ‖ → ∞, alors le point d'équilibre est stable. Si en plus, est globalement définie négative (ie =
et < ≠ ), alors est globalement asymptotiquement stable.
Il est important de noter que les théorèmes précédents sont basés sur des conditions suffisantes mais pas nécessaires, ce qui rend cette méthode restrictive. Plusieurs fonctions de Lyapunov peuvent être trouvées pour un même système.
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
27
1.2.2.2
Théorèmes de Brayton & Moser
Dans les années 60, R.K. Brayton et J.K. Moser ont proposé une approche mathématique pour étudier la stabilité des systèmes RLC non linéaires [BRA64a], [BRA64b]. Ils ont défini une fonction appelée "potentiel mixte" , qui permet de modéliser le réseau électrique sous la forme (1.19). Ce modèle est basé sur un système de type gradient associé à une fonction scalaire :
{ =
,
= ,
(1.19)
Le point fort de cette approche est lié au fait qu’une méthode systématique permet de construire ce potentiel mixte. L’écriture du système sous la forme (1.20) conduit à définir trois théorèmes sur la stabilité asymptotique du système étudié.
, = − + + . . (1.20)
avec si et sont deux vecteurs de dimension r, , est défini par , = ∑=
Ainsi, et représentent le potentiel de courant et le potentiel tension. est une matrice d’interconnexion représentant le rapport de transformation entre et . Les théorèmes et donnent des critères de stabilité qui dépendent de l’interconnexion du circuit donnée par la matrice . )ls présentent l’avantage d’être indépendants des non linéarités du système.
Notons ‖ ‖ = , la norme scalaire. Théorème 3 de Brayton & Moser :
Soit = . Si est constante, symétrique et définie positive, alors + | . . | → ∞ si | | → ∞ et si ∃ > tel que ‖ − − ‖ − pour tout et tout , alors les
trajectoires de (1.19) tendent vers les solutions d’équilibre quand → ∞. Théorème 4 de Brayton & Moser :
Soit = . Si est constante, symétrique et définie positive, alors + | . . | → ∞ si | | → ∞ et si ∃ > tel que ‖ − − ‖ − pour tout et tout , alors les
trajectoires de (1.19) tendent vers les solutions d’équilibre quand → ∞.
Le théorème 5, contrairement aux 2 théorèmes précédents, est basé sur des critères qui ne dépendent plus de la matrice d’interconnexion . Dans ce cas, elles dépendent des non linéarités du système.
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
28
Notons µ la plus petite valeur propre de la matrice symétrique . Théorème 5 de Brayton & Moser :
Si L et C sont constantes, symétriques et définies positives, et si µ − − + µ − − > pour tout et tout , alors les trajectoires de (1.19) tendent vers les solutions d’équilibre quand → ∞.
1.2.2.3 Etude par linéarisation : Stabilité petit signal
Cette méthode est basée sur le principe intuitif qu'un système non linéaire se comporte de la même façon que son approximation linéaire pour des perturbations de faible amplitude. Il est possible de linéariser les équations autour de chaque point de fonctionnement afin d'en étudier la stabilité dite petit signal.
Comme nous l'avons déjà vu, le point de fonctionnement est défini par l'équation suivante :
= = , (1.21)
Considérons une petite perturbation ̃ autour d'un point de fonctionnement :
= + ̃ et = + ̃ (1.22)
L'équation d'état du système devient :
= + ̃ = + ̃, + ̃ (1.23)
Ces variations étant considérées petites, il est possible de développer (1.23) en série de Taylor limitée aux termes de 1er ordre. Pour chaque variable d'état du vecteur d'état , on peut donc écrire :
+̃ = (� , ) + ̃ +� ̃ avec = , . . , � (1.24)
Sachant que = ( , ), l'équation précédente peut s'écrire :
�
̃ = ̃ +� ̃ avec = , . . , � (1.25)
En mettant le résultat précédent sous forme matricielle, on peut donc obtenir une représentation d'état sous la forme ̃ = ̃ + ̃.
La matrice , appelée matrice d'état, est la matrice Jacobienne de par rapport à (1.26).Elle contient la description du comportement dynamique du système en régime libre :
= ( ̃ ̃ ⋱ n ̃ ̃ ) (1.26)
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
29
La matrice , appelée matrice de commande, est la matrice Jacobienne de par rapport à . Elle rend compte du comportement dynamique du système vis à vis de la commande :
= ( ̃ ̃ ⋱ ̃ ̃ ) (1.27)
Un système non linéaire mis sous sa forme linéarisée autour d'un point de fonctionnement permet d'en étudier la stabilité en utilisant les outils développés pour les systèmes linéaires. C'est ce qui justifie de pouvoir utiliser des outils de contrôle linéaires en pratique. Néanmoins, un des principaux inconvénients de cette technique est le domaine de validité de notre étude. En effet, la définition des petites variations est assez floue et ne permet pas de quantifier la perturbation tolérée par le système.
1.2.2.4
Etude par modélisation Takagi-Sugeno
La modélisation Takagi-Sugeno (TS) appartient aux modèles flous . Une règle floue est de type "si ..., alors ...". Takagi et Sugeno ont proposé un formalisme de modélisation convenant bien aux systèmes non linéaires [TAK85],[SUG88]. Le principe de la modélisation sous la forme TS est de considérer un modèle non linéaire comme la somme pondérée de n modèles linéaires :
{ = ∑ µ ( )[ + ] = = ∑ µ ( ) = (1.28)
La pondération des sous-modèles se fait via les fonctions d’activations qui sont fonction de l’état du système. Ces fonctions d’activations doivent respecter la propriété de somme convexe :
{∑ µ (= )= µ ( ) > , ∀
(1.29)
La nécessité de cette dernière condition devient évidente lorsque l'on considère le cas de la mise sous forme de Takagi-Sugeno de systèmes linéaires.
La variable est appelée prémisse. Elles peuvent dépendre de l'état du système, des paramètres extérieurs, du temps, et représentent les variables de décision du modèle. Ces prémisses sont utilisées pour sortir les non linéarités du système.
La modélisation de Takagi-Sugeno n'est pas propre à chaque système. Une méthode pour trouver un modèle de Takagi-Sugeno a été développée [MAR09], et est basée sur le lemme suivant.
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
30
Lemme 1 :
Si ∀ ∈ [− , ], , ∈ +, : [− , ] → , est bornée sur [− , ], alors il existe deux fonctions et deux réels tels que :
{
:[− , ] → [ , ], ∈ { , }→ _
+ =
= +
(1.30)
Ainsi, en considérant une fonction bornée telle que , on peut écrire :
= −− + −− (1.31)
Avec = , = −
��− , = et =
��− ��−
Avec ce choix de modélisation, un système avec une non linéarité peut être divisé en deux systèmes linéaires. Cela implique qu'un système à n non linéarités sera représenté par 2n
modèles linéaires. Cette méthode a été utilisée pour réaliser des études de stabilité dans le cas de petits réseaux continus [MAR12].
On vient de voir que la modélisation de Takagi-Sugeno permet de transformer un système non linéaire en une somme pondérée de systèmes linéaires. Cela permet d'utiliser les outils d'étude linéaire pour étudier les systèmes non linéaires, telle que la détermination d'une fonction de Lyapunov, que nous verrons dans le paragraphe suivant.
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
31
1.2.3
Méthodes d’étude de stabilité des systèmes linéaires
1.2.3.1 Méthodes de Lyapunov
Méthode directe de Lyapunov : cas particulier des systèmes linéaires Considérons un système linéaire de la forme :
= (1.32)
et la fonction de Lyapunov quadratique candidate :
= (1.33)
avec une matrice symétrique définie positive (si ≠ ⟹ > ).
alors = + (1.34)
En utilisant les équations (1.32) et (1.34), on obtient :
= + = − (1.35)
soit + = − (1.36)
La condition pour que le système soit stable est que soit une fonction définie négative, donc que soit une fonction définie positive. L'équation (1.36) est appelée équation de Lyapunov. Le théorème utilise ce résultat en prenant l'hypothèse non pas sur mais sur .
Théorème 3 : stabilité globale
Une condition nécessaire et suffisante pour que le système = soit stable est que, pour toute matrice Q symétrique définie positive, la seule matrice solution de l'équation de Lyapunov + = − est symétrique définie positive.
Cela revient à trouver une matrice solution de la LMI (Linear Matrix Inequalities)suivante :
{�t + � < > (1.37)
Néanmoins, il est important de noter que pour obtenir la LMI (1.37), une matrice a dû être choisie (cf théorème 3). Or de ce choix découle une matrice particulière. Cette méthode est donc restrictive : si une matrice est solution, alors le système est stable; sinon, on ne peut pas conclure quant à la stabilité du système.
Méthode indirecte de Lyapunov
Considérons le système d'état linéaire suivant (1.38):
= (1.38)
La solution d'un tel système est de la forme :
= � (1.39)
avec ∈ et ∈ (1.40)
En remplaçant cette solution dans l'équation (1.32), on obtient :
− = (1.41)
Pour que l'équation aie une solution, il faut que :
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
32
est l'ensemble des valeurs propres du système qui peuvent être réelles ou complexes. Le système est stable si et seulement si le système converge. Compte tenu de la forme de la solution (1.39), il résulte les conditions de stabilité suivantes.
Théorème 4 : stabilité d'un système linéaire
- si toutes les valeurs propres ont une partie réelle négative, le système est asymptotiquement stable.
- si au moins une valeur propre a une partie réelle positive, le système est instable. - si une valeur propre a une partie réelle nulle, on ne peut pas se prononcer.
L'analyse des valeurs propres d'un système permet d'en étudier son comportement dynamique. Elles permettent de connaître avec exactitude la fréquence des oscillations ainsi que l'amortissement du système. Ainsi, une valeur propre de la forme = � ± nous informe qu'une des pulsations propres du système est et que la constante de temps associée est � = /� .
Cette méthode est fréquemment utilisée pour l'étude des systèmes linéaires car elle est très simple à mettre en œuvre. Mais elle présente l'inconvénient d'être difficilement exploitable pour étudier analytiquement des systèmes d'ordre élevé. Dans ce dernier cas, l’étude peut être réalisée en effectuant une résolution numérique du problème.
1.2.3.2 Etude des pôles de la fonction de transfert
La stabilité des systèmes linéaires peut également être considérée en étudiant les pôles de la fonction de transfert du système. Considérons le système linéaire suivant :
{ = . + .
= . + . (1.43)
Pour obtenir la fonction de transfert de ce système, on choisit les paramètres de sortie du système ainsi que l'élément perturbateur en fixant les vecteurs et .
La fonction de transfert du système est déduite à l’aide de la relation de passage :
= . − − + (1.44)
Dans le cas simple où D=0, on peut réécrire cette équation en fonction du déterminant de − . Notons c��t M la comatrice de M. La fonction de transfert peut donc être reformulée
selon la relation :
= c��d�� � −t � − + (1.45)
Les pôles de la fonction de transfert sont les valeurs propres de la matrice . Il y a une équivalence entre les valeurs propres d’un système et les pôles de sa fonction de transfert.
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
33
Propriété :
Le système représenté par sa fonction de transfert est stable si et seulement si les pôles de sa fonction de transfert sont toutes à partie réelle négative.
1.2.3.3
Méthode de Routh-Hurwitz
Le critère de Routh-Hurwitz permet d'étudier la stabilité d'un système via son polynôme caractéristique. Soit un système défini par une fonction de transfert H(s) écrite sous sa forme polynomiale :
= ++ − − + + +
− − + + +
(1.46)
Le polynôme caractéristique de cette fonction est donc :
= + − − + + + (1.47)
Le critère de Routh-Hurwitz s'applique au tableau de Routh dont la construction est donnée dans le Tableau 1-1 : − − … … − − − … … … … … … … … …
Tableau 1-1 : Tableau de Routh
avec = −| − − − | − , = − | − −− | − , = − | − − | , = −| − − | Critère de Routh-Hurwitz
Le nombre de pôles à partie réelle positive est donné par le nombre de changement de signes des termes de la 1ère colonne du tableau de Routh (Tableau 1-1). Dans le cas où le tableau de Routh possède un élément nul dans la 1ère colonne, alors :
- si la ligne correspondante contient un ou plusieurs éléments non nuls, A(s) possède au moins une racine à partie réelle strictement positive.
- si tous les éléments de la ligne sont nuls, alors :
° soit A(s) a au moins une paire de racines imaginaires pures (système oscillant) ° soit A(s) possède une paire de racines réelles de signe opposé
° soit A(s) possède quatre racines complexes conjuguées deux à deux et de parties réelles de signe opposé deux à deux.
CHAPITRE 1. METHODES D'ETUDE DE LA STABILITE DES SYSTEMES ELECTRIQUES
34
Cette méthode a l'avantage de proposer un critère de stabilité assez simple et facilement programmable. Mais elle ne permet pas de connaître l'emplacement des pôles du système dans le plan complexe. Il est donc impossible de connaître la robustesse d'un système par rapport à la stabilité car aucune information n'est donnée concernant la proximité des valeurs propres par rapport à l'axe réel.
1.2.3.4
Spectroscopie d’impédance
Ces méthodes d'analyse de stabilité sont très largement répandues car elles fournissent des critères simples. Elles sont souvent utilisées dans une optique de conception. Les critères de Nyquist sont tout d'abord rappelés car ils représentent la base du critère de Middlebrook [MID76b], [MID77], qui est très couramment utilisé et qui est ensuite détaillé.
Critère de Nyquist
Soit un système à une seule entrée et une seule sortie (SISO) écrit par deux fonctions de transfert (Figure 1-15).
H1
+
-H2
Figure 1-15 : Représentation d'un système SISO
Un système en boucle fermée est asymptotiquement stable si et seulement si le diagramme de Nyquist de sa boucle ouverte = . ne passe pas par le point (-1,0) et l'encercle (dans le sens trigonométrique) un nombre de fois égal au nombre de pôles instables de .
Ce théorème est le plus souvent utilisé dans le cas où est stable. D'autres critères de stabilité plus restrictifs mais plus simples sont largement utilisés, tel que le critère du revers.
Critère du revers
Si est stable, il suffit de vérifier que lorsque l'on parcourt le lieu de Nyquist de la boucle ouverte quand croît, le tracé de Nyquist laisse le point (-1,0) sur la gauche pour garantir la stabilité du système bouclé. Si en plus, le tracé de Nyquist ne coupe jamais le cercle de centre 0 et de rayon 1, le critère se résume à : ∀ , | | < .
Pour les réseaux alternatifs triphasés, qui sont par définition multi-variables, on utilise plutôt le critère de Nyquist généralisé.