Values for Markovian coalition processes
Texte intégral
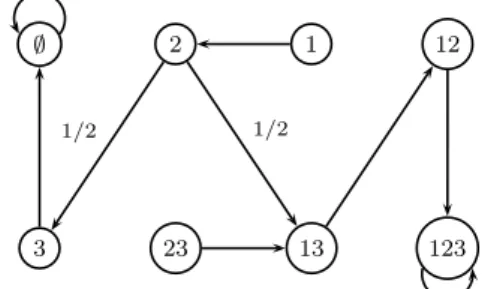
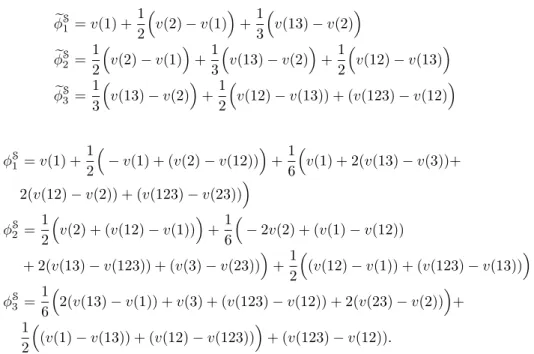
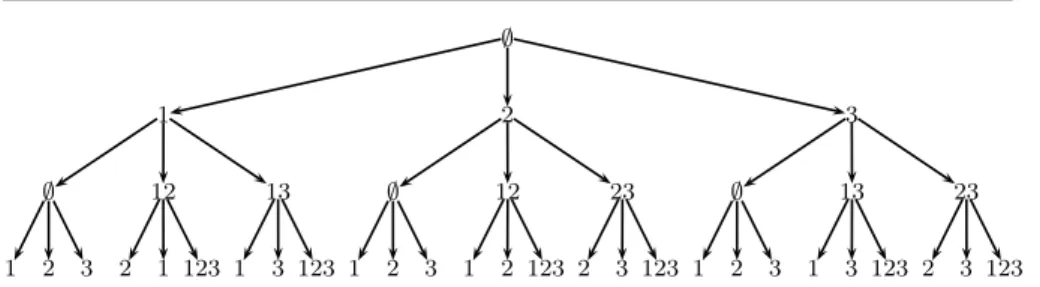
Figure
Documents relatifs
The paper proposes a list of requirements for a game able to describe individually motivated social interactions: be non-cooperative, able to construct multiple coalitions in
Regarding the rain effects corrections, we found significant changes for pairs PUS-KLA, KLA-PLA, and DEL-PLA, whereas, due to their low correlation with GWL curve, the
Theorem 2: For the proposed CSS model, given that the SUs collaborate for improving their payoff given the tradeoff between probability of miss and false alarm, any
Figures 2 and 3 show that the HSE hybrid functional with optimized mixing parameter reproduces experimental O K- edge EELS spectra of TM oxides and Li-TM-oxides very well, and for
However, the general approaches discussed here – the use of a hybrid linear–nonparametric regression algorithm, the examination of calibrations by limiting the environmental
Emergent Diagnosis via Coalition Formation 759 a student model having enough information to characterize student’s conceptions in a specific domain of knowledge [13].. 2.3
Given a coalition T (not necessarily admissible) a selection of S is strategy-proof for each player in T if and only if each one reaches his incremental value at any
Avec la réunification, un nouveau parti a émergé sur la scène politique, le PDS, héritier des anciens communistes devenu Die Linke (La Gauche, ou, plus justement, la gauche de
