REPUBLIQUE DEMOCRATIQUE ET POPULAIRE
MINISTERE DE LENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE
UNIVERSITE MENTOURI-CONSTANTINE FACULTE DES SCIENCES DE LINGENIEUR
DEPARTEMENT DELECTRONIQUE
N° Ordre : Série :
MEMOIRE
Présenté pour lobtention du diplôme de magistère électronique
OPTION
CONTROLE DES SYSTEMES
Par
ILYES BOULKAIBET
UNE ETUDE EN SIMULATION DE STRATEGIES
DE COMMANDE NON LINEAIRE
SOUTENUE LE 09 / 12/ 2007 Devant le jury :
Président : Noura Mansouri, Professeur, Université de Constantine Rapporteur : Khaled Belarbi, Professeur, Université de Constantine Examinateurs :
Salim Filali, Professeur, Université de Constantine
REMERCIEMENTS
Je tiens à exprimer ma profonde gratitude à mon directeur de thèse Monsieur Khaled Belarbi, Professeur à lUniversité de Constantine, pour la proposition du sujet de cette thèse et pour ses conseils et son soutient tout au long de ce travail.
Jadresse mes vifs remerciements à Mlle Noura Mansouri, Professeur à l Université de Constantine, pour lintérêt quelle a porté à ce travail en acceptant de lexaminer et de présider le jury.
Jadresse mes vifs remerciements à Messieurs les membres de jury : Salim Filali, Professeur à lUniversité de Constantine,
Amar Bentounsi, Maître de conférence à lUniversité de Constantine, pour lintérêt quils ont voulu porter à ce travail en acceptant de l examiner.
Que tous mes amis et collègues trouvent ici le témoignage de mon amitié et de ma reconnaissance.
Sommaire
Chapitre I : INTRODUCTION GENERALE
Chapitre II : LINEARISATION PAR RETOUR DES SYSTEMES NON LINEAIRES
I. Introduction
II B
ases mathématiques
II.1 Introduction a la géométrie différentielle : II.1.1 Difféomorphisme :
II.1.2 Champ de vecteurs : II.1.3 Dérivée de Lie :
II.1.4 Théorème de Frobenius : III
Stabilite des systems nonlineaires
III.1 Stabilité du point déquilibre :
III.2 Méthode directe de Lyapunov ou seconde méthode :
IV Linearisation des systemes nonlineaires
IV.1 La représentation détat affine : IV. 2 Linéarisation par retour détat :
IV.3 Linéarisation partielle par retour détat : IV.4 Extension aux systèmes multi- entrées : IV.5 Linéarisation entrée sortie:
IV.5.1 Degré relatif global :
IV.5.2 linéarisation en entrée-sortie par retour d état :
Chapitre III : UNE SOLUTION ANALYTIQUE A COMMANDE PREDICTIVE BASEE SUR UN MODELE NON LINEAIRE SANS CONTRAINTES
I Introduction
III Modèle de prédiction affine : Linéarisation par retour détat
III.1 Position du problème :III.2 Solution par modèle détat : III.3 Solution par la Commande GPC :
IV Résultats de simulation
IV.1 Exemple 1 :
V.2.1 Application de la commande prédictive GPC : V.2.2 Application de la commande prédictive MBPC : V .3 Exemple 2 : Application de la commande prédictive MBPC : Chapitre IV : LA METHODE DU «BACKSTEPPING»
I Introduction
II Commande par backstepping
II.1 Approche non adaptative :II.1.1 Principe : II.1.2 Simulation : II. 2 Approche adaptative :
II.2.1 Conditions d'implantation : II.2.2 Simulation :
II 3 Généralisation : II.3.1 Théorie :
II.3.1 Résultats de simulation Application à un robot avec le joint flexible :
III Backstepping avec observateur
III.1 Approche non adaptative avec observateur : III.2 Résultat de simulation :
CHAPITRE 1 :
INTRODUCTION GENERALE
I
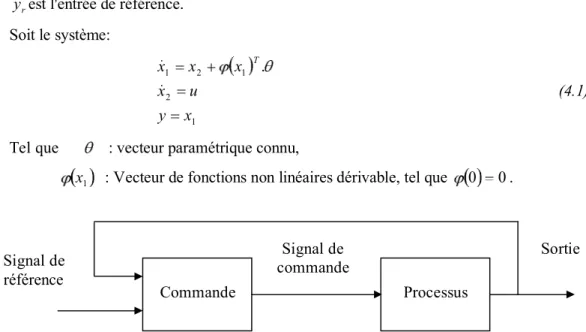
l est généralement admis que bien que tous les systèmes réels aient un comportement nonlinéaire, un grand nombre peut être commandés par les techniques de l automatique linéaire. Ceci est possible lorsque le système non linéaire peut être linéarisé pour de petites variations autour dun point de fonctionne ment ou lorsque des simplifications sont introduites dans les modèles. Il existe cependant un certains nombre de systèmes, parmi lesquels on peut citer les moteurs à couran t alternatif, les robots manipulateurs, les satellites, quelques réacteurs chimiques pour lesquels une modélisation linéaire n est plus possible ni désirable Pour cela plusieurs méthodes de commandes basées sur des modèles non linéaires ont été proposées. Une des premières approches de conception systématique dune commande non linéaire est la commande dite linéarisante ou linéarisation par retour, feedback linéarisation [1]. Elle est basée sur des changements de variables et des développements mathématiques rigoureux et est généralement applicable a des systèmes ayant une structure particulière en l occurrence les systèmes affines par rapport à la commande. Un peut plus tard est apparue la commande dite backstepping [2] applicable à des systèmes dont les modèles sont donnés sous une forme particulière et la méthodologie de conception est basée sur la théorie de la stabilité de Lyapunov.Avec la commande en régime de glissement développée dans l ex URSS, ces deux approches sont celles qui ont eu le plus décho dans la communauté scientifique et qui ont permis de résoudre plusieurs problèmes pratiques.
Par ailleurs la commande prédictive à base de modèle linéaire a connu un large succès dans lindustrie. Cependant sa version non linéaire avec ou sans contraintes est confrontée à la résolution numérique en ligne d un problème doptimisation non linéaire difficile. Il serait alors souhaitable denvisager comme dans le cas linéaire une solution analytique pour les problèmes sans contraintes. C est dans cette optique que s inscrit une partie de notre travail : nous utilisons la théorie de la commande linéarisante pour construire une solution analytique pour le cas dune commande prédictive à base de modèle non linéaire sans
contraintes. Lautre partie de notre travail est une étude détaillée avec applications en simulation de la commande backstepping.
Ce mémoire est organisé comme suit : le deuxième chapitre introduit la théorie de la commande linéarisante, ou théorie de la linéarisation par contre réaction, feedback linéarisation, le troisième chapitre développe la méthode de solution analytique proposée pour la commande prédictive non linéaire sans contraintes. Deux cas sont traités, le cas de la commande prédictive généralisée avec un modèle entrée sortie et le cas d un modèle sous forme déquations détat linéaires. Le quatrième chapitre est une étude en simulation de la commande backstepping. Plusieurs situations sont étudiées : commande non adaptative, commande adaptative et commande avec observateur détat.
CHAPITRE 2 :
LINEARISATION PAR RETOUR DES SYSTEMES NON
LINEAIRES
I.
Introduction
Ce chapitre introduit les éléments de base de la commande linéarisante, feedback linéarisation. Ces éléments sont basés sur [1].
II
Bases Mathématiques
II.1 Introduction a la géométrie différentielle :
II.1.1 Difféomorphisme : Soit p un point de R et une application dun ouvert n n
R
U dans un ouvert V Rn, on dit que est un difféomorphisme local dans un
voisinage U de p si est inversible de U dans un voisinage V du point p de V , et si 1 et est continue.
II.1.2 Champ de vecteurs : un champ de vecteur sur R est une fonction dérivable n
nn n f : : ) ( ) ( ) ( 2 1 x f x f x f x f n (2.1) II.1.3 Dérivée de Lie : Pour une fonction scalaire h :x h x et un champ de
vecteur xf , la dérivée de Lie est définie par :
dh f xh x f h L i n i i f 1 , (2.4) Avec L h L Li h f f i f 1 , L1fh Lfh, L0fh h. (2.5) a) Crochet de Lie :
Deux champs de vecteurs peuvent être composés comme suit :
f,g h f g h g f h LfLgh LgLfh (2.6)
f,g h adfg Où f ,g h Lfg (2.7) b) Propriétés : Distributivité : 1f1 2f2,g 1 f1,g 2 f2,g (2.8) f, 1g1 2g2 1 f,g1 2 f,g2 (2.9) Anti-commutativité : f,g g,f (2.10) Identité de Jacobi : adfadgq adgadqf adqadfg 0 (2.11) Formule de Leibnizs : L d L h ad g d L h ad g d L h ads g f s k f s f s k f s f s k f f , 1 , , 1 (2.12)
Définition 2.1 : Une distribution D est dite involutive si et seulement si pour tout couple de champs de vecteurs f et g de D on a f ,g D.
Une distribution involutive est donc caractérisée par D,D D. Si D nest pas involutive, on peut définir sa clôture involutive :
Définition 2.2 : La clôture involutive D ou inv ..clD dune distribution D est la plus petite distribution involutive contenantD .
II.1.4 Théorème de Frobenius :
Soit une distribution D de dimension r surW , un sous-ensemble R , alors autour de n
n'importe quel point p W il existe un rang de voisinage U.x1, ,xn , U un voisinage
de p avecxi i q 1, i n, tel que i D , c.-à.-d pour nimporte quelle fonction
D f
i,f 0, x U. r 1 i n (2.13) si, et seulement si, D est une distribution involutive.
Par suite du théorème de Frobenius, considérons r champ de vecteurs f1, ,fr dansR , il n
existe une solution non triviale pour léquation différentielle :
d ,fi 0 1 i r (2.14) Si et seulement si la clôture involutive du la distribution span f1, ,fr a un dimension
inférieur ou égal à n 1 où span signifie sous-espace vectoriel engendré par .
III Stabilité des systèms nonlinèaires
a) Définition 2.3 : Stabilité au sens de Lyapunov
Létat déquilibre x est dit stable si : e 0, 0tel que si x 0 xe alors e
x t
x t 0.Dans le cas contraire, x est dit instable. e
b) Définition 2.4 : stabilité asymptotique
Un point déquilibrex est asymptotiquement stable s il est stable et sil existee 0 tel
que : x 0 xe tlimxt xe.
c) Définition 2.5 : stabilité exponentielle
Un point déquilibre xeest exponentiellement stable sil existe 0et 0 tel que : t e e r e r x r x B xt x x x e B t 0, , , 0 , 0
d) Définition 2.6 : stabilité globale
Si la propriété de stabilité asymptoti que, (exponentielle) est vérifiée quelque soitx , le 0
point déquilibre est globalement asym ptotiquement, (exponentiellement) stable. III 2 Méthode directe de Lyapunov ou seconde méthode :
Théorème 2.1 : stabilité (asymptotique) locale
Sil existe une fonction scalaire xV de létat dont les dérivées partielles premières sont continues et telle que:
1- V est une fonction candidate de Lyapunov.
2- V est localement semi définie négative dans un voisinage de l origine, . Alors le point déquilibre 0 est stable et un domaine de conditions initiales stables est délimité par nimporte quelle équipote ntielle de Lyapunov contenue dans .
Si V est localement définie négative dans , alors la stabilité est dite localement asymptotique dans la partie de lespace délimité par nimporte quelle équipotentielle de Lyapunov contenue dans .
Théorème 2.2: stabilité globale asymptotique Sil existe une fonction V telle que
1- V est une fonction candidate de Lyapunov. 2- V est définie négative.
3- La condition x implique xV
IV Linéarisation des systèmes nonlinéaires
IV.1 La représentation détat affine :De nombreux systèmes dynamiques admettent une représentation d'état non linéaire particulière dite affine en la commande. Elle est donnée par les équations suivantes : Cas continu : x h t y t u x g x f t x i m i1 i (2.15)
Si le système est monovariable, on a : x h t y t u x g x f t x (2.16) Cas discret : x h k y k u x g x f k x 1 mi1 i i (2.17)
Si le système est monovariable on a : x h k y k u x g x f k x 1 (2.18)
IV.2 Linéarisation par retour détat : Théorème 2.3 :
Le système à une seule entrée (2,16) est localement linéarisable par retour d'état si, et seulement si, autour dun voisinage de l'origine U :
i) n n f g R ad g span , , 1 , ii) la distribution 2 2 , , nf n span g ad
G est involutive et à un rang constant égal à 1
n ,
Ou, d'une manière équivalente, si et seulement si :
iii) Les distributions G span g, ,adi , 0 i n 1
f
i sont involutives et de rang
constant égal à 1i .
Si (i) et (ii) sont satisfaites donc nous pouvons appliquer le théorème de Frobenius, qui garantit lexistence dune fonction dérivable h telle que dans un voisinage de l'origine :
2 0 , 0 , 0 , 1 n i g ad dh g ad dh i f n f (2.19)
et h(0) 0. En d'autres termes (i) et (ii) garantissent l'existence d'une solution h pour l'ensemble d'équations partielles linéaires :
dh g dh ad g dh adn g x f f , , , 0, ,0, , , , 1 ( ) ( (2.20)
Pour une certaine fonction x , 0 0, définissons n fonctions ), ( , , ,L h x L 1h x x h n f
f nous pouvons montrer que :
z z z z h x L h x Ln h x T x f f n 1 2 1, , , , , , (2.21)
Avec z T x un difféomorphisme local. Le système (2.16) est exprimé en z-coordonnées par : z L h x L Li 1h x u, 1 i n. f g i f (2.22)
De (2.20), on applique la formule de Leibniz x x h L L n i x h L L n f g i f g 1 2 0 , 0 (2.23) Léquation (2.22) devient : . 1 1 ,, 1 1 u x h L L x h L z n i z z n f g n f n i i (2.24)
On définit alors le retour détat
v x h L L x h L L x h L u n f g n f g n f 1 1 1 (2.25)
IV.3 Linéarisation partielle par retour détat :
Le système (2.16) est localement partiellement linéarisable par retour d état avec l'indice r si la distribution G , la clôture involutive de r 2 G , à un rang constant au r 2
moins égal à n 1 en U et au voisinage de lorigine, il existe un nombre entier r , 0
n r
2 , tel que
adfr1g x Gr 2 x inv.cl.span g, ,adrf 2g . x U0. (2.26) Nous pouvons appliquer le théorème de Frobenius qui garantit l existence dune fonction dérivable h telle que dans un voisinage de l'origine :
2 0 , 0 , 0 , 2 1 n i G dh g ad dh r r f (2.27)
Avec : adrf 1g Gr 2 rank g, ,ad 2,adr 1 r, f r f (2.28)
Par conséquent, si on applique encore le théorème de Frobenuis, puisque span g est une distribution involutive de rang égal à 1 on peut déterminer, en plus les fonctions déjà déterminées h Lr h
f1
,
, , n r fonctions 1 x, , n r x, i 0 0, telles que : Lg i d i x,g 0, 1 i n r (2.29) Le résultat du développement mathématique donne :
z Ljxh ij nr r f j i i 1 , 1 , 1 (2.30) Donc on a: , ,1 1 , 1 1 h L uL h L z r j z z x L r f g r f r j j i f i (2.31) Si on définit : u L L1r 1h Lrfh v, f g (2.32) On obtient : , ,1 1 , 1 v z r j z z x L r j j i f i (2.33)
IV.4 Extension aux systèmes multi- entrées : Théorème 2.4 :
Le systèmes non linéaire (2.15) est localement linéarisable dans un voisinage de l'origine, par une transformation de retour d'état non singulière (qui se compose d'un retour non singulier et d'un difféomorphisme dans les systèmes contrôlables linéaires sous la forme de contrôleur de Burnovsky avec les indices de contrôlabilité k1 k2 km
i) Gki 21, i m, est involutive et a un rang constant, ii) rankGK1 1 n,
Avec :
a) le retour d'état non singulier :
u K x x v; K 0 0 (2.34) xK est une fonction dérivable de 0V en R , x est une matrice de n m m avec les
entrées dérivable, non singulières en 0V b) un difféomorphisme local en 0V
z T x , T 0 0 (2.35) c) les indice de contrôlabilité k1, ,km associés au système (2.15) sont définis par :
ki card mj i: j 0, 1 i m (2.36) Avec : 2 1 1 0 1 1 0 0 n n n rankG rankG m rankG rankG m rankG m (2.37) Les condition (i) et (ii) garantissent lexistence de m fonctions dérivable 1 x, , m x telles que : d i,GKj 2 0, j i (2.38) Et la matrice : m Km f m Km f m m K f K f g ad d g ad d g ad d g ad d 1 1 1 1 1 1 1 1 , , , , 1 1 (2.39)
est non singulière en V(0). La transformation et le difféomorphisme du retour d état non singuliers de linéarisation sont, respectivement :
u L L L L L L L L L L v m Km f gm m Km f g K f gm K f g m Km f K f 1 1 1 1 1 1 1 1 1 1 1 1 (2.40) Avec :
m Km f m K f L L z 1 1 1 1 1 (2.41)
IV.5 Linéarisation entrée sortie
Dans cette section nous présentons une fonction de sortie dérivable
n
n R
R x
h : qui définit la variable de sortie y y h x
Nous supposons que le variable y doit être commandable et que le variable d'état x est disponible pour les mesures. Le système est décrit :
R y x h y R u R x u x g x f x n , , , (2.42)
IV.5.1 Degré relatif global :
Le degré relatif global du système (2.42) est défini comme un nombre entier tels que: . , 0 2 0 , , 0 1 n f g n i f g R x x h L L i R x x h L L (2.43) Si L Lih x 0, x Rn, i 0 f g On dit que
IV.5.2 Linéarisation en entrée-sortie par retour détat :
Le système (2.42) est localement partiellement linéarisable par retour d état avec lindex , et localement linéarisable en entrée-sortie par retour d état c.-à-d localement la relation entrée-sortie équivalente à:
) ( 1 1 1 , , , 1 1 1 h L v h L L u x y v z i z z R z f f g i i n (2.44) Si et seulement si: n , Système avec incertitudes :
Dans cette partie le système est de la forme :
x f x q x, t g xu (2.45) Théorème 2.5: (incertitudes triangulaires) si le système (2,45) vérifie :
i) Le système nominal f , est localement (globalement) linéarisable par retour g détat,
ii) La supposition stricte de triangularité :
adqGi Gi, 0 i n 2 est satisfaite dansU , voisinage de l'origine (dans0 R ) ; n
Le système (2,45) est localement (globalement) linéarisable par retour d état équivalent à: . , , , 1 1 , , , , 1 1 1 t z z v z n j t z z z z n n n j j j j (2.46) Avec : 1 1 (v L h) h L L u n f n f g
CHAPITRE 3
UNE SOLUTION ANALYTIQUE A COMMANDE
PREDICTIVE BASEE SUR UN MODELE NON
LINEAIRE
I. Introduction
Dans ce chapitre nous introduisons une méthode pour construire une solution analytique pour le cas dune commande prédictive à base de modèle non linéaire sans contraintes. Cette méthode utilise la théorie de la commande linéarisante. Deux cas sont traités, le cas de la commande prédictive généralisée avec un modèle entrée sortie et le cas d un modèle sous forme déquations détat linéaires.
II. La commande prédictive à base de modèle
On considère le système discret non linéaire :
x k 1 f(x k ,u k ) (3.1) Ou x est létat du système, u cest le vecteur dentrée du système.
Lobjectif et de trouver une loi de commande qui permet de régler létat de système à lorigine. Pour trouver cette loi, il faut résoudre le problème d optimisation suivant : 1 1 , 1 , u , j N j N u J x H xk j u k j Min (3.2) Avec x k j f xk j 1,u k j 1 ,x k xk , xk j Xet u k j U x(k) est létat initial ,
x(k j), j=1 N, j sont les prédictions sur les états futurs obtenues à l instant k à partir du modèle de prédiction (3.1) et le N est l'horizon de prédiction.
La solution de ce problème donne une séquence optimale des commandes
u*=(u k ,u*(k 1),...,u*(k N 1)) (3.3) Et un trajectoire optimale x*:
x*=(x(k 1),x(k 2),...,x(k N)) (3.4) La définition du problème et sa méthode de résolution dépend la nature du modèle de prédiction (3.1) et de la fonction coût (3.2). Lorsque le modèle est linéaire et qu il ny a pas de contraintes sur les différentes variables, une solution analytique peut être facilement obtenue [4], sil y a des contraintes il existe des méthodes efficaces et rapides pour la résolution numérique en ligne du problème d optimisation. Cependant dans le cas de modèle nonlinéaire, les méthodes de résolu tion demandent un temps de calcul assez important, ce qui limite lapplicabilité de la commande prédictive non linéaire. Dans ce qui suit nous utilisons la théorie de la linéarisati on par retour introduite au chapitre précédent pour construire une solution analytique à la commande prédictive nonlinéaire sans contraintes dans le cas dun modèle de prédiction affine en la commande. Deux cas seront traités : la commande prédictive linéaire à base de modèle d état et la commande prédictive généralisée.
III Modèle de prédiction affine : Linéarisation par retour détat
III.1 Position du problème et solutionDans le cas où le système ( 3.1) est dans une représentation d'état non linéaire affine en la commande donnée par les équations suivantes :
xyk h1x k f xk g x k u (3.5) Si on trouve une relation entre les états x et une autre variable z tel que :
x k u x v avec Cz y v B z A k z x T z z z 1 (3.6)
La loi de commande qui permet de régler létat de système à lorigine, devient le problème doptimisation suivant : 1 1 , 1 , v , j N j N v J z R z k j vk j Min (3.7)
III.2 La commande prédictive à base de modèle détat Dans ce cas: 2 ) ( 1 0 2 ) ( r ( |k) y -k) | ( ) , ( j R N j N N j Q j v u H j k v j k j k y v y J Min (3.8)
En vertu des calculs présentés au deuxième chapitre, la loi de commande est donnée par :
h L L v h L u n f g n f 1
La figure (3. 1) montre la méthode qui permet de calculer la loi de commande.
tyr tv tu ty
Figure (3.1)
III .3 Solution pour la commande prédictive généralisée (GPC) :
On peut mettre léquation (3.6) sous la forme dune fonction de transfert par une représentation linéaire donnée par l expression suivante :
A(z-1) . y(t) = B(z-1) . v(t-1) + X(t) (3.9)
Où: A et B sont des polynômes de l'opérateur de retard z-1.
A(z-1) = 1 + a
1 z-1+ a2 z -2 +...+ ana z-na.
B(z-1) = b
0 + b1 z-1+ b2 z-2 +...+ bnb z-nb.
na et nb étant des nombres entiers représentant les degrés de A et B resp.
X(t) : est un terme relatif à une perturbation survenant à un instant ' t' quelconque. Dans le cas de la GPC, x(t) est tel que X(t)=c(z-1).e(t) / ,
en substituant ceci dans l'équation (5.9) on aura :
A(z-1) . y(t) = B(z-1) . v(t-1)+ C(z-1) . e(t) / (3.10)
Où : C(z-1) = 1 + c
1 z-1 +c2 z-2+ ...+ cnc z-nc ( nc est le degré de C ).
=1- z-1 , appelé opérateur de différence, son rôle et d'assurer une action intégrale sur le
contrôleur à fin d'annuler l'effet des perturbations. e(t) : est un bruit gaussien blanc à moyenne nulle.
Commande MBPC L L h v h L u n f g n f 1 x h y u x g x f x 1 z y x T z
Le critère devient : 2 1 1 2 2 1 , v , j N j N j j r N v u j k v j k y j k y z J Min (3.11)
Dela même façon que ci-dessus la loi de commande est donnée par :
h L L v h L u n f g n f 1
La figure (3. 2) montre cette stratégie de commande
yr t tv tu ty x Figure (3.2)
IV Résultats de simulation
Dans cette section nous présentons deux exemples d applications de la méthodologie présentées. Le premier exemple est la commande de la position d un robot à un seul joint, la deuxième est une commande multivariable d un moteur asynchrone.
IV.1 Exemple 1 : Commande dun robot
On considère ici la commande dun robot avec le joint flexible. Les variables détats x1,x2,x3,x4 sont x1 q1, x2 q1, x3 q2, x4 q2. Il sagit de commande la
position représentée par l angle q1 en agissant sur le couple u.
Le modèle est réécrit sous la forme suivante :
Commande GPC u LL Lhn hv f g n f 1 x h y u x g x f x 1 z y
u J 1 x x J k x J F x x x x x Jk x J Mgl x J F x x x m 3 1 m 4 m m 4 4 3 3 1 1 1 1 2 1 1 2 2 1 sin (3.12) , , sin m 3 1 m 4 m m 4 3 1 1 1 1 2 1 1 2 J1 0 0 0 x g x x Jk x J F x x x Jk x J Mgl x J F x x f (3.13)
IV.1.1 Application de la commande prédictive GPC :
On définit la fonctionh x1, avec z T x un difféomorphisme local définit par :
z T x h,Lfh,L2fh,L3fh z1,z2,z3,z4 , (3.14) On obtient alors: . sin cos sin 4 1 3 1 1 1 1 2 1 1 1 1 2 1 1 1 4 3 1 1 1 1 2 1 1 3 2 2 1 1 x Jk x x Jk x J Mgl x J F J F x Jk x J Mgl z x x Jk x J Mgl x J F z x z x z (3.15)
Le résultat de linéarisation par retour d'état est donnée par :
v z v h L L h L L h L u avec z z z z z z f g f g f 4 3 3 4 4 3 3 2 2 1 1 (3.16) Avec
. sin cos cos sin m 1 3 f g 4 m m 3 1 m 1 4 2 1 1 3 1 1 1 1 2 1 1 2 1 2 1 1 1 1 2 2 1 1 1 2 1 1 1 1 4 f J Jk L L x J F x x Jk Jk x J kF x x Jk x J Mgl x J F J F Jk x J Mgl x J kF x J Mgl F x J Mgl h L (3.17)
On peut écrire le système (3.16) sous la forme dune fonction de transfert, donc : 4 4 4
1 y v H s s1
z (3.18)
Si on discrétise le système pour Te=0.1s on a alors : . 10 333 . 8 10 2.167 10 5.5 10 2.167 10 333 . 8 z B 4 6 4 1 z A 4 7 3 5 -2 5 -1 5 -7 1 -4 3 2 1 -1 z z z z z z z z (3.19) Pour les constantes est les valeurs initiales
, 20 ,1 ,1 , 0 0 0 0 0 , 1 ,1 , 1 . 0 , 100 , 2 , 4 0 0 0 0 0 , 2 , 8 . 9 , 1 2 4 3 2 1 1 1 4 3 2 1 N N z z z z F F s Te k J J x x x x l g M u m m
On obtient les résultats de simulation donnés par les figure 3.3 et 3.4: ou on remarque que langle présente un dépassement relativement important dù à l effet des non linéarités.
Figure (3.4) La variation de la commande u
Dans le cas ou le systèmes non-linéaire est sous contraintes en utilise la GPC avec
contraintes. La procédure de commande sous contrainte est la suivante. Nous avons : min max max min
u
u
u
u
u
u
(3.20)Les états du système sont bornés, donc les états de retour d état z1, ,zn sont bornés,
Donc on peut écrire que : max min max min v v v v v v (3.21)
La technique de commande est basée sur l algorithme suivant a) Calcul des matrices constantes de GPC
b) On fait une simulation pour calculer les valeurs max des équations (3.21) compatible et équivalentes aux équations (3.20),
c) On applique la fonction QP de Matlab
Dans la même application on prend les mê mes valeurs et les conditions initiales de lexemple précédent avec :
, 6 , 20 ,1 7 . 0 , 2 . 2 12 4 1 . 0 07 . 0 4 . 0 32 . 0 2 min max max min min min max max N N v v u u v u v u u (3.22)
Les résultats de simulation sont donnés par les figures 3.5, 3.6 et 3.7. L effet des non linéarités est assez apparent sur la sortie y, et les commandes et leurs incréments satisfont les contraintes. 0 200 400 600 800 1000 1200 0 5 10 15 20 25 30 35 40 variation de y
Figure (3.5) : La variation de langle y
Figure (3.6) : La variation de v et de u
Figure (3.7) : La variation de v st de u
IV.1.2 Application de la commande prédictive MBPC :
Dans ce cas on utilise le même exemple dapplication, le résultat de linéarisation par retour d'état est donné par (3.16). On peut écrire
Cz y Bv Az z (3.23)
La discrétisation de système (3.23) pour un temps déchantillonnage Te 0 donne le .1s résultat suivant zykk 1CzAkzz k Bzv k (3.24) Avec : 1 . 0 005 . 0 0002 . 0 0 , 1 0 0 0 1 . 0 1 0 0 005 . 0 1 . 0 1 0 0002 . 0 005 . 0 1 . 0 1 z z B A (3.25)
Pour les mêmes valeurs initiales avec : Nu 2,NH 20,R ,1Q ,1 on obtient les résultats des simulations donnés par les figures 3.8 et 3.9. l effet des non linéarités sur la sortie est caractérisé par les fluctuations de la réponse (figure 3.8).
Figure (3.8) : La variation de longle y(°)
Figure (3.9) La variation de la commande u
Dans le cas ou les systèmes non-linéaire est sous contraintes, on utilise la commande MBPC avec contraintes. Nous considérons le cas de la commande prédictive MBPC avec contraintes qui peuvent être écrites sous la forme :
0 1 k U E ( ) (3.26) F U1(k) 0 (3.27) G Z1(k) 0 (3.28)
Dons cet cas on cherche une relation entre les équation (3.26), (3.27) et (3.28) et les équations suivantes : 0 1 ) ( 1 V k E (3.29) F1 V1(k) 0 (3.30) G1 Z1(k) 0 (3.31)
Où V(k) v(k|k)T,...,v(k Nu 1|k)T T est défini de la même manière que V(k).
La technique de commande est basée sur lalgorithme suivant d) Calcul des matrices constantes de MBPC
e) On fait une simulation pour calculer une relation entre wf , des équations (3.26), (3.27) et (3.28), et les valeurs f1, w1 les équations (3.29)....,
f) On applique la fonction QP du Matlab,
Dans la même application on prend les mê mes valeurs et les conditions initiales que lexemple précédent avec :
. 1 ,1 , 20 . 2 . 0 2 . 0 2 . 0 2 . 0 , 10 10 10 10 : 7 . 0 7 . 0 7 . 0 7 . 0 14 . 0 14 . 0 14 . 0 14 . 0 , 6 . 0 6 . 0 6 . 0 6 . 0 2 1 1 w N R Q f donc g et w f N pour H u
Les figures 3.10, 3.11 et 3.12 donnent les résultats de simulation. L effet des nonlinéarités est encore apparent sur la sortie et on remarque que les commandes et leurs incréments satisfont les contraintes.
Figure (3.10) : La variation de la sortie y(°)
Figure (3.11) : La variation du retour v et la commande u
IV.2 Exemple 2 Commande dun moteur synchrone :
Les équations dynamiques d'un moteur synchrone à aimant permanent avec la distribution sinusoïdale de flux sont données par:
L u p w L K i L R t i L u p w L K i L R t i J T w J F p i J K p i J K t w w t b m b b a m a a L b m a m cos sin cos sin (3.32)
Dans lesquels et w sont la position et la vitesse de rotor, et i , et a ib u ,a ub courants
et tensions de stator exprimées en armature fixe stator. Les paramètres du moteur sont le R résistance d'enroulement de redresseur, et self-inductance L , le constant de couple de moteur K , l'inertie de rotor J , le constant de frottement F et le nombre des pôles paires m
P . Tous les paramètres, sauf T , sont positifs. On suppose queL P 1. Lobjectif est de
commander la vitesse et de minimiser l énergie.
On définit la fonction h , avec z T x et un difféomorphisme local est définit : z T x z1,z2,z3,z4, (3.33) Donc on obtient: sin cos cos sin 4 3 2 1 b m a m L b m a m i K i K z J T w J F i J K i J K z w z z (3.34)
la variable z4 représente lénergie consommée. Les sorties à commander sont données
par : y=w ; y=z4 . Le modèle est réécrit sous la forme suivant :
2 4 1 3 3 2 2 1 v z v z z z z z Avec b a b a m v v u u J J L K 2 1 sin cos cos sin (3.35)
Application de la commande prédictive MBPC :
Dans ce cas on utilise la notion de commande MBPC multi-variable, le résultat de linéarisation par retour d'état est donnée par (3.35). On peut écrire
Cz y Bv Az z (3.36)
La discrétisation de système (3.23) pour un temps déchantillonnage Te 0.001s donne le résultat suivant zykk 1CzAkzz k Bzv k (3.37) Avec : 1 0 0 0 0 0 1 0 001 . 0 0 0 001 . 0 0 0 0 0 , 1 0 0 0 0 1 0 0 0 001 . 0 1 0 0 0 001 . 0 1 C B Az z (3.38)
Pour les constantes et valeurs initiales suivantes :
, 0 0 0 0 0 , 0 0 0 0 0 , 001 . 0 , 0.04244 , 001 . 0 , 93 . 1 , 5 , 03 . 0 , 2 3 , 100000 0 0 10000000 , 1 0 0 1 , 55 , 3 4 3 2 1 a b L m H u i i w z z z z Te L F R T J K Q R N N
On obtient les résultats donnés par les figures 3.11,3.12 et 3.13. La vitesse ne présente pas de dépassement important, lénergie consommée est maîtrisée, les courants de commande sont sinusoïdaux.
Figure (3.11) : La variation de la sortie y (vitesse w en rad/s) 1
Figure (3.13) : La variation de la retour u et la commande a u b
Pour le cas des systèmes non-linéaires multi-variables, on utilise la méthode MBPC avec contraintes. De la même manière que lexemple précédent, avec les mêmes valeurs des paramètres du système et les mêmes conditions initiales. On choisit :
, 40 , 80 , 40 , 40 , 360 , 260 , 330 , 330 , 4 , 4 , 160 , 160 1 0 0 1 , 1000 0 0 1000000 , 55 ,3 min max min max min max min max min 2 max 2 min 1 max 1 2 b b a a b b a a u u u u u u u u u y y y y R Q N N
Les résultats de simulation sont donnés sur les figures 3.14, 3.15 et 3.16. On remarque que les contraintes sont satisfaites pour toutes les variables.
Figure (3.15) : La variation de la sortie y avec contrainte (maximum dénergie) 2
Processus Signal de référence Commande Signal de commande Sortie
CHAPITRE 4 :
LA
METHODE DU «BACKSTEPPING»
I. Introduction
Dans ce chapitre nous développons une étude de la méthode de commande backstepping. L'utilisation de cette technique exige une méthodologie systématique pour la conception. Les éléments théoriques de ce chapitre sont basés sur [2]. Plusieurs simulations seront présentées dans les cas adaptatif et non adaptatifs.
II Commande par backstepping
II.1 Approche non adaptativeII.1.1. Principe
Pour simplifier la présentation, nous commençons par développer un exemple de commande non adaptative (figure 3.1) par la technique backstepping dans le but d'atteindre la convergence des erreurs afin de réaliser la stabilité et l'équilibre y x1 du système dont
r
y est l'entrée de référence. Soit le système: 1 2 1 2 1 . x y u x x x x T (4.1)
Tel que : vecteur paramétrique connu,
1
x : Vecteur de fonctions non linéaires dérivable, tel que 0 0.
La conception du backstepping est récursive. D'abord, on choisit l'état x comme étant la 2
commande virtuelle de létat x (voir figure 4.1), ensuite on adopte la fonction stabilisante 1
suivante: . 1 1 1 1 1 x c x yr x T .c1 0 (4.2)
Cette solution est conçue pour stabiliser l'équation (4.1), en supposant que
1 1
2 x
x peut être implantée. Puisque ce n'est pas le cas, on définit:
r r y x x z y x z 1 2 2 1 1 (4.3)
z2 est la variable qui exprime la réalité que « x n'est pas la commande exacte». Alors, 2
le système complet (4.1) peut être formulé en utilisant les nouvelles coordonnées z1 et z2:
r r r T y y y x x x u z z z c z . . 1 1 2 1 1 2 2 1 1 1 (4.4) Pour le système d'équations (4.4), on va concevoir une loi de commande
2 1, x
x
u afin de rendre la dérivée de la fonction de Lyapunov définie positive:
2 2 2 1 21 2 1z z V (4.5)
La dérivée de (4.5) le long de la trajectoire donne:
r r r T y y y x x x z u z z c z z z z V . . . . 1 1 2 1 1 1 . 2 2 1 1 2 2 1 1 (4.6) Le chemin évident pour réaliser et atteindre la négativité de V est de choisir la commande u comme: r r r T y y y x x x z z c x x u , . 1. 1 2 1 1 1 2 2 2 1 2 (4.7) Alors: 0 2 2 2 2 1 1z c z c V (4.8)
Ce qui signifie que l'équilibre est globalement asymptotiquement stable. Le système en boucle fermée est stable:
Z A
Z . (4.9)
2 1 2 1 , 1 1 z z Z c c A
La solution dans ce cas se traduit par: t
A Z
Z 0.exp . (4.10)
II.1.2 Résultats de simulation :
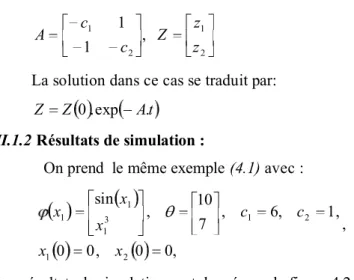
On prend le même exemple (4.1) avec : , 0 0 , 0 0 , 1 , 6 , 7 10 , sin 2 1 2 1 3 1 1 1 x x c c x x x , Les résultats de simulation sont donnés par la figure 4.2.
Figure 4.2. Résultat de simulation dune commande backstrpping approche Non-adaptative
II.2 Approche adaptative
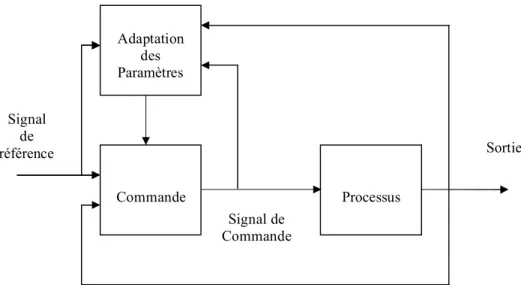
Les modèles réels des systèmes physiques ne sont pas linéaires et habituellement caractérises par des paramètres (masses, inductances, ...) qui sont peu connus ou dépendent d'un petit changement d'environnement. Si ces paramètres varient dans un intervalle important, il serait préférable d' employer une loi d'adaptation pour estimer les paramètres du système. La figure 4.3 donne le schéma de principe dune commande adaptative.
Figure 4.3 : Schéma de principe de la commande adaptative II.2.1 Conditions d'implantation
Comme la majorité des méthodes de commande des systèmes non linéaires, l'application de la technique backstepping est limitée à certaines classes de systèmes. Les systèmes dans ce cas doivent être sous une certaine forme triangulaire. La forme générale du système a analyser est donnée par :
1 1 1 2 2 1 2 1 2 3 2 1 1 2 1 . . . ,..., . . . . , . x y x u x x x x x x x x x x x x x T n n T n n n T T (4.11)
Ou chaque i:Ri Rp: est un vecteur de fonctions non linéaires, et R est un p
vecteur de coefficients constants. La commande u est multipliée par la fonction x , avec x 0, x Rn. Si le but est d'atteindre la trajectoire désirée
r
y
en utilisant l'état
i
x , alors l'algorithme du backstepping peut être utilisé pour la stabilisation globale
asymptotique de l'erreur du système (on note l'erreur primaire par z Rn). Puisque le
vecteur est inconnu, alors avec une augmentation du système par la dynamique de l'estimateur , une version algorithmique adaptative du backstepping est utilisée dans le
Adaptation des Paramètres Commande Processus Signal de Commande Signal de référence Sortie
but d'avoir une stabilité globale et asymptotique de l'erreur du système. En général, l'algorithme de la commande adaptative backstepping peut être utilisé pour atteindre la stabilité globale et asymptotique de l'erreur du système si les ét apes et les conditions suivantes sont respectées :
Le système est introduit selon la forme (4.11) ; Les fonctions non linéaires i sont connues ;
La paramètrisation est linéaire ;
La fonction x satisfait la condition, x 0, x Rn ;
Chaque i est continûment dérivable ;
Le signal de référence y est continu ; r
Tous les états sont mesurables.
Le diagramme, présenté par la figure 4.4, présente un exemple d'ordre trois avec x 1 et les fonctions non linéaires dépendent seulement des variables d'état.
Figure 4.4 : Schéma du système d'ordre trois
Dans ce qui suit, on va présenter l'étude d un système non linéaire et l'implantation du backstepping sera introduite afin de réaliser une commande adaptative. Le problème d'adaptation surgit à cause du vecteur paramétrique inconnu et le vecteur de fonctions non-linéaires x est connu avec1 0 0.
Soit le système : 1 2 1 2 x y u x x x x T (4.12) . 1T . 1T . 3 T 2 x 3 x x1
Pour concevoir une commande adaptative dans cette partie, on remplace le vecteur de paramètres réels par son estimation dans la fonction de stabilisation (équations 4.2 et 4.3), ce qui donne : , , 1 1 1 1 1 1 2 2 1 1 T r r z c x y x x z y x z (4.13)
Dans ce cas, la loi de commande donnée par (4.7) va être renforcée par le terme v2(x1,x2, )qui va compenser les transitions des paramètres estimés.
u x x c z z x x T v x x yr x yr 1 1 2 1 2 2 1 1 1 2 2 2 1 2 , , , , (4.14)
Le système résultant dans les coordonnées z est :
r r r T r r r T T T y y y x x v x z z c y y y x x u x z z z c z z 1 2 1 2 1 1 1 1 2 2 1 1 2 1 1 1 2 2 2 1 1 1 2 1 , , ~ ~ . (4.15) Avec: ~
En tenant compte de l'équation (4.15), le terme compensateur est choisi comme suit: , , 1 2 1 2 x x v (4.16)
Si l'erreur ~ est nulle, le système devient asymptotiquement linéaire et stable (équation 4.10). Puisque ce n'est pas le cas, la tâche suivante consiste à choisir la loi de mise a jour 2 x ,
Considérons la fonction de Lyapunov: ~ ~ 2 1 2 1 2 1 2 1 2 2 1 2 z z T V (4.17)
~ ~ ~ 2 1 1 1 1 2 2 2 2 1 1 1 1 1 2 1 2 2 2 2 1 1 2 z z x z c z c x z z z c z c V T T T (4.18)
La seule solution pour éliminer l'erreur paramétrique ~ est de choisir la loi de mise jour suivante :
2 1 1 1 2 , z z x x (4.19)
ce qui permet d'écrire les expressions suivantes :
1 1 1 x z 2 1 1 1 1 2 1 2 x ,x , x x z (4.20)
Alors, V est négative et la stabilité globale de z=0 est réalisée. 2
0 2 1 1 2 1 1 2 c z c z V (4.21)
Enfin, il résulte que l'équilibre est globalement stable et Limt x1 t yr
Figure 4.5 : Commande adaptative du système bouclé
T T x1 1 T T x1 1 2 1 1 1 c c 2 1 z z 2 ~
II.2.2 Résultats de Simulation
On prend le même exemple (4.1) avec :
, 0 0 , 11 . 0 004 . 0 004 . 0 5 . 0 , 0 0 , 0 0 , 001 . 0 , 0 0 , 0 0 ,1 , 150 , 50 , 10 20 , sin 0 2 1 2 1 2 1 2 1 1 1 x x Te x x y c c x x x r ,
Les résultats de simulation donnés par les figure s 4.6, 4.7, 4.8 et 4.9. On remarque que la sortie suit bien la référence avec un dépassement assez important caractéristique d une commande adaptative non linéaire. En effet durant les premières itérations le système est en phase dapprentissage. Les paramètres convergent rapidement vers un état stationnaire,
1
convergent vers la vraie valeur 1 mais présente un léger offset. 2
Figure 4.7 : la commande de système
Figure 4.9 : variation de par rapport a 2 2
II.3 Généralisation II. 3.1 Théorie
Afin de donner l'algorithme de la commande adaptative « backstepping » pour certaines classes de systèmes non-lineaires, le schéma (4.10) représente la procédure globale de cette technique. La forme générale du système est donnée par :
, . . . ,..., . . . . , . 1 1 1 2 2 1 2 1 2 3 2 1 1 2 1 x y x u x x x x x x x x x x x x x T n n T n n n T T (4.22)
Telles que x 0 x net F x 1 x1 , 2 x2 , n xn vecteur de
fonctions non linéaires lisses.
Par convention, on définit z0 0, 0 0, 0 0 1 1 i i r i i x y z i i k k r k r i k k i T i i i i i r i i x y z c z w x x y y v 1 1 1 1 1 1 1 1 , , 1 2 1 1 1 , , i k i k k i i i r i i x y wz v i i i i r i i x , ,y 1 1 wz k i k k i i i r i i x y x w 1 1 1 2 , , n i ,1 , connues y y y y y x x x x i r r r r i r i i 1, 2, , , , , , ,
La loi de commande adaptative:
n r n r n x y y x u 1 , , 1
La loi de mise à jour: z w y x n r n , , 1
Le système bouclé aura la forme: ~ , , , , T z z t z wz t A z
z t z w , , Tel que: n n n n n n n z c c c t z A , 1 2 , 1 23 2 23 2 1 1 0 1 . . . . . . 1 0 1 1 0 0 1 , , et k i ij x, 1 w
La fonction de Lyapunov s'exprime par: ~ ~ 2 1 2 1 T T 1 n Z Z V
La condition de stabilité est sous forme:
1 2
k k k
n C Z
V
II.4.2 Résultats de simulation Application à un robot avec le joint flexible Les équations dynamiques d'un bras de robot de lien avec un joint élastique tournant dans un plan vertical sont données par :
1 2 1 2 2 1 2 1 1 1 1 1 sin 0 q y u q q k q F q J q Mgl q q k q F q J m m (4.23)
Dans lesquels q et 1 q sont le déplacement (ou la rotation) du lien et le déplacement de 2
rotor, respectivement. L'inertie du lienJ , l'inertie de rotor de moteur 1 J , la constante m
élastique k , le masse de lienM , le constant du gravitée g , le centre du masse l et les coefficients visqueux de frottement F ,1 Fm sont des paramètres positif. La commande
u est le couple fourni par le moteur. On choisit comme variables d états x1,x2,x3,x4 telles
que :
x1 q1, x2 q1, x3 q2, x4 q2
Le modèle est réécrit sous la forme suivant :
u J x x Jk x J F x x x x x Jk x J Mgl x J F x x x m m m m 1 sin 3 1 4 4 4 3 3 1 1 1 1 2 1 1 2 2 1 (4.24)
Avec les paramètres F ,1 Fm sont des paramètres inconnus, donc on peut écrire le système
sous la forme suivante :
p i iq x u x g x f x 1 (4.25) Avec
4 2 1 1 3 1 4 3 1 1 1 1 2 0 0 , 1 0 0 0 , sin x x x q J F J F J x g x x Jk x x x Jk x J Mgl x x f m m m m (4.26)
Pour rendre le système (4.24) sous la forme (4.22) il faut vérifier les conditions suivantes : i) Le système nominal f , est localement (globalement) linéarisable par g
retour détat,
ii) La supposition stricte de triangularité adqGi Gi, 0 i n 2
est satisfaite dansU , voisinage d'origine (dans0 R ) ; n
i) On définit la fonction h x z1 x1 4 4 2 2 4 3 1 3 4 2 3 1 1 1 1 1 2 4 , sin , 1 x x x x q x x x Jk x x x x x Jk x J Mgl x x f x J g m m (4.27) , 1 , 1 , 1 3 2 1 3 4 2 1 2 3 1 2 2 1 1 x Jk x Jk J L L L L g ad x Jk x Jk J L L L L g ad x J L L L L g ad m m f g ad g ad f f m m f g ad g ad f f m f g g f f f f f f (4.28) Doncspan g, ,ad3g R4 f .
Donc : , , , 0 , , , 0 , , , 0 , 2 2 2 2 2 2 2 2 2 2 g ad g span G g ad g ad aussi g ad g span G L L L L g ad g g ad g span G L L L L g ad g f f f f g g ad g ad g f f g g ad g ad g f f f f f
On a donc la distribution G2 span g, ,adf2g est involutive et a un rang constant égal à3,
ii) la 2eme supposition est : adqGi Gi, 0 i 2 Avec: G0 span g G1 span g,ad1fg .
Cette condition est satisfaite parce que : 1 0 , 0 G i G adq i i
adqG2 se calcule comme suit
2 2 2 , 0 , 0 ad ad g et ad ad g ad g G g adq q f q f f
Les deux conditions sont vraies donc on peut faire la transformation de système sur la nouvelle forme qui est donnée par la formule (4.11) avec :
) ( 1 , cos 0 0 1 , , , cos sin 4 3 4 1 1 2 1 3 4 2 3 2 2 1 1 1 1 2 4 1 1 2 1 3 4 3 1 1 1 1 2 3 2 2 1 1 v h L h L L u avec x Jk x x J Mgl h L L h L L x h L L h L n i h L L x x x x Jk x x J Mgl x h L z x x Jk x J Mgl x h L z x x h L z x x h z f f g f q f q f q q i f q i f f f (4.29)
Les valeurs numériques :
, 4 . 0 4 . 0 4 . 0 8 10 , 0 0 0 0 0 1 ,1 , 10 , 20 , 5 , 5 . 5 , 65 , 100 , 2 , 4 0 0 0 0 0 , 95 . 0 474 . 0 2 , 8 . 9 , 1 5 4 3 2 1 1 3 4 3 2 1 1 4 3 2 1 0 z z z z F F s Te c c c c avec k J J x x x x l g M m m
la référence sans dépassement, le temps de réponse est égal à 2 secondes. Comme dans le précédent exemple, le paramètre convergent vers la vraie valeur 1 1 mais présente 2
un léger offset.
Figure 4.11 : la sortie du système y en degré
Figure 4.13 : variation de la valeur estimée 1
Figure 4.14 : variation de la valeur estimée 2
III.1 Approche non adaptative avec observateur:
Certains systèmes ont des états inaccessibles à mesurer ou difficile ou coûteux à mesurer, soit par impossibilité physique d introduire un capteur, soit pour des questions des coûts, on ne peut pas mesurer tous les états. La solution est d utiliser la notion dobservateur basé sur les mesures faites sur l entrée et la sortie du processus. Dans cette section, on introduit lobservateur sur la commande backstepping. La conception backstepping d'observateur peut être appliquée au système à retour de sortie, dans lequel les non linéarités dépendent seulement des sorties
1 0 1 1 1 1 1 1 2 3 2 1 2 1 x y u y b y x u y b y x x u y b y x x y x x y x x y x x n n n n n m (4.30)
On suppose que le système est minimum de phase, c.-à-d. bmsm b1s b0 est un
polynôme de Hurwitz, et y 0 y R.
Pour dériver un observateur pour le système, nous réécrivons le système sous la forme : x C y x x u y b y Ax x T 0 0 , (4.31) Où 0 0 0 I A , 0 0 0 b b b m , 0 0 1 C , 1 , y y y n (4.32)
, x C y u y b y y y k x A x T Avec k i n k k k k i n 0 , 0 , 2 1 (4.33) On choisit k de façon que A A kCT
0 est une matrice de Hurwitz. ,
En a Lerreur dobservateur : x~ x x Alors 0 0 0 0 0 ~ ~ 0 ~ , ~ ~ x x x et x x x A x (4.34)
Supposons que le signal de référence yr t C [0, ), On définit les expressions récursives suivantes : 2 1 1 1 1 1 1 1 1 1 2 1 1 2 1 1 ) 2 ( 1 1 1 1 1 1 1 1 1 1 . , ,1 , , , , , , , i j j r j r i i j j j j j i i i i i i i i i i i i i r i r r i i i i r i y y y x y k x x y x y y x y k y d d c y y y x x y x y d c y y y (4.35) Où ci,di1, i n sont des constantes positives.
Le contrôleur est alors défini par :
r p m y x y b u 1 1 (4.36)
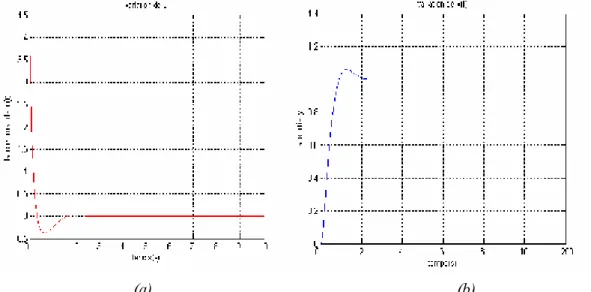
III.2 Résultats de simulation :
Dans le but dillustrer la méthode de commande avec observateur, on propose la simulation du système d ordre deux
1 2 1 2 1 x y u x y x x u Avec 1 y sin y , u 5 , (4.37)
Le signal de référence est : yr 1 avec 1.0583 0125 . 0 0125 . 0 0171 . 0 0 0 0 , 0 0 0 , 0 01 . 0 , 40 , 30 ,1 ,1 , 1 2 1 2 1 2 1 2 1 2 1 P x x x x kC A A Te k k d d c c T
Les résultats sont donnés par la figure 4.15
(a) (b)
Figure .4.15 Exemple de commande backstepping non adaptative avec observateur (a) la commande, (b) la sortie
CHAPITRE 5 :
CONCLUSION GENERALE
Dans ce travail, nous avons introduit une technique de commande prédictive basée sur un modèle non-linéaire reposant sur l utilisation dun linéarisation par retour d état pour la commande MBPC ou retour de sortie pour la GPC. Cette technique permet de réaliser une commande non linéaire valable seulement pour les systèmes linéarisable par retour d état dans le cas de MBPC et linéarisable par retour de sortie dans le cas de la GPC),
Lavantage de cette méthode est :
i) On évite la linéarisation du système pour augmenter la robustesse du système commandé
ii) Pour le cas sans contraintes on obtient une solution analytique. Pour le cas avec contraintes, le problème est plus complexe. Les nouvelles contraintes ont été obtenues par simulation.
Par ailleurs nous avons étudié deux approches de la commande adaptative et non adaptative en utilisant la technique backstepping. Dans le cas non adaptatif, tous les paramètres du système sont connus ce qui a permis d'avoir des résultats globalement acceptables. Lorsque ces paramètres sont inconnus, nous avons adoptés une commande adaptative indirecte basée sur une estimation en ligne des paramètres du système. Les résultats obtenus sont satisfaisants.
Bibliographie
[1] Isidori A. (1989). Non linear control systems. (2nd edition) Berlin: Springer.
[2] Kristic, M., Kanellakopoulos, I. & Kokotovic, P. V. (1995). Nonlinear and adaptive control design. New York: Wiley.
[3] M. Arcak and P. Kokotovi´c, Redesign of backstepping for robustness against unmodelled dynamics, International Journal of Robust and Nonlinear Control 11 (2001), no. 7, 633 643.
[4] Clarke, D. W., C. Mohtadi and P. S. Tuffs , Generalised predictive control, Parts 1 and 2, Automatica, 23, pp. 137-160, 1987.
[5] Maciejowski, J. M., Predictive Control, Prentice Hall, 2002.
[6] C. E. Garcia, D. M. Prett, and M. Morari, "Model predictive control: Theory and practice-a survey," Automation, vol. 25, no. 3, pp. 335-348, 1989.
Annexe-A
A.1 La commande Prédictive Généralisée (GPC: Generalized Predictive
Control):
Dans le cas du GPC, x(t) le modèle de prédiction est donné par
A(z-1) . y(t) = B(z-1) . u(t-1)+ C(z-1) . e(t) / (A.1)
où : C(z-1) = 1 + c
1 z-1 +c2 z-2+ ...+ cnc z-nc ( nc est le degré de C ).
=1- z-1 , appelé opérateur de différence, son rôle et d'assurer une action intégrale sur le
contrôleur à fin d'annuler l'effet des perturbations. e(t) : est un bruit gaussien blanc à moyenne nulle.
Le modèle décrit par l'équation (A.1) représentatif du système a contrôler est appelé modèle CARIMA (Controlled Auto Regressive Integrated and Moving Average ), ce modèle constitue le modèle de base de la méthode GPC à partir duquel sera dérivée l'expression de la loi de commande.
La fonction de coût :
Pour déterminer la commande à appliquer au système à l instant t, la méthode GPC minimise le critère suivant :
J (t) = 2 1 N N j [ y(t+j) - w(t+j) ] 2 + Nu N j 1 *[ u(t+j-1) ] 2 (A.2)
avec : u(t+j) = 0 pour j Nu
où :
N1 : est l'horizon minimal de prédiction. N2 : est l'horizon maximal de prédiction. Nu : est l'horizon de commande.
:est un facteur de pondération du signal de commande ( > 0 ). w(t+j): est la trajectoire future de référence connue à lavance. u(t+j): est lincrément de contrôle.
Cette fonction (A.2) est minimisée à chaque échantillon et seulement le premier incrément de contrôle sera appliqué au système à contrôler.
Le prédicteur à j-pas :
Pour simplifier le calcul de la loi de commande GPC, on va poser : C(z-1) = 1, on a : C(z-1) = 1 =E
j( z-1)+ .A(z-1) + Z-j .Fj(z-1) (A.3)
où Ej et Fj sont des polynôme en z 1 .
Cette dernière équation (A.3) est appelée équation diophantine. Après calcul l'expression du prédicteur s écrit :
y(t+j) = Gj. u(t+j-1) + Fj.y(t) (A.4)
avec Gj = B.Ej ,
Léquation précédente peut être après développement divisée en deux parties ( partie des signaux connus et partie des signaux inconnus ) qui sécrit sous forme matricielle :
= G . +F (A.5) où : , U et F sont des vecteurs de dimension N 1 avec :
= [ y(t+1),y(t+2),...,y(t+N) ]t = [ u(t) , u(t+1) ,..., u(t+N-1) ]t
F = [ f(t+1) , f(t+2) ,....,f(t+N) ]t
et f(t+j) =[g(j,j).z-j+g(j,j+1).z-(j+1)+..+g(j,nb+j-1).z-(nb+j-1)]. u(t+j-1) + F j.y(t) .
la matrice G2 définie dans l'équation (A.5)) serait une matrice de dimension N*N tel que : g(1,0) 0 0 ... 0
g(2,1) g(2,0) 0 ... 0 G = : : : :
g(N,N-1) g(N,N-2) g(N,N-3) ... .g(N,0) (A.6) La loi de la commande prédictive :
La loi de commande est calculée de façon à minimiser le critère quadratique suivant : J = j N 1 2 [(y(t+j) - w(t+j) ]2+ j Nu 1 .[ u(t+j-1)] 2 (A.7)
avec : u(t+j-1) = 0 pour j > Nu
Le terme [(y(t+j) - w(t+j)]2 représente la somme pondérée des erreurs futures entre les
sorties futures et les signaux de consignes w(t+j) (j=1..N2).
Le terme [ . u(t+j-1)]2 représente le coût de leffort de commande
Le critère (A.10) peut être écrit sous forme matricielle comme suit :
J =(Y - W)T . (Y - W) + . UT . U (A.8)
La relation du prédicteur est: Y = G.U + F en remplaçant cette dernière dans léquation (A.8) ont trouve : J = (G.U+F-W)T . (G.U+F-W) + .UT . U (A.9)
J est minimale si J/ Ü = 0 U = [ (GT.G) + .I ] 1 . GT . (W - F) (A.10)
où I représente la matrice identité.
Cette dernière équation fournie les incréments futurs de contrôle pour les instants tà (t+Nu-1), basés sur les informations disponibles à l instant t. Seulement u(t) sera
appliqué au système et la commande est alors tel que : u(t) = u(t) + u(t-1)
La minimisation du critère sera reprise à chaque échantillon pour le ca lcul de la nouvelle commande à appliquer au système.
A.2 la commande prédictive généralisée avec contraintes :
Dans le cas de la GPC avec contraintes le problème est de minimiser J en tenant compte de:
u
minu
u
max (A.11)Donc on peut écrire J sous la forme : U QU d U c 2 1 J T T (A.12) avec :
I
G
G
Q
T (A.13)G
W
f
2
d
T conu)
(
(A.14) ) ( ) (f W f Wc conu T conu (A.15)
Pour résoudre ce problème on utilise l'instruction QP (Quadratic programming) le programme quadratique de Matlab.
A.3La commande prédictive à base d'un modèle détat (MBPC: Model
Based Predictive Control):
A.3.1 Cas sans contraintes:
Calcul des prédictions :Le modèle de base pour calculer les prédictions est un modèle d état discret donné par : ) ( ) ( ) 1 (k Axk Bu k x y(k) Cyx(k) ) ( ) (k Cx k z z (A.16)
x(k) variable détat, y(k) sorties du système, z(k) sorties à commander, k linstant déchantillonnage. Souvent on a z(k)=y(k) Aussi on suppose que nous ne savons rien au
sujet des perturbations ou bruit de mesure, alors tout ce que nous pouvons faire est de prédire à partir des équations ci-dessus, nous obtenons:
x(k /1k) Ax(k) Bu(k/k) x(k 2/k) Ax(k /1k) Bu(k /1k) A2x(k) ABu(k/k) Bu(k /1k) x(k N2|k) Ax(k N2 1|k) Bu(k N2 1|k) AN2x(k) AN2 1Bu(k|k) Bu(k N2 1|k)
Dans la première ligne nous avons utilisé û (k|k) plutôt que u(k), parce qu'au moment où nous avons besoin de calculer les préd ictions nous ne savons pas quel est u(k) . Maintenant rappelons que nous avons supposé que la commande changera aux temps k, k+1, , k+Nu
-1seulement, et restera constante après cela. Donc nous avons û(k+Nu-1) pour: Nu i N2-1.
En fait, nous voudrons avoir les prédictions exprimées quant à û(k+i|k) plutôt que û(k+i|k) . Le prédicteur sécrit sous forme matricielle :
futur N N i i N i i N i i N i i passé N i i N i i N i i N N N N k u B A B A B AB B A B B A B Ab B k u B A B A B A B k x A A A A N k x u u u u u u k) | 1 (k u k) | ( 0 0 ) 1 ( ) ( k) | (k x k) | 1 N (k x k) | N (k x k) | 1 ( u 0 1 2 0 0 1 0 1 2 0 0 1 0 1 2 u u 2 2 (A.18) Les prédictions de z sont maintenant obtenues simplement
k) | 2 ( C k) | 2 (k z k) | 1 ( C k) | 1 ( z z k x k x k z | (A.19) k) | ( C k) | (k N2 zx k N2 z où: k) | (k x k) | 1 ( 0 0 0 0 0 0 k) | N (k z k) | 1 ( 2 2 N k x C C C k z z z z
Calcul de la commande La fonction coût sécrit :
2 ) ( 1 0 2 ) ( ( |k) i) r(k -k) | ( ) ( 2 1 Ri N i N N i Qi u i k u i k z k V (A.20)
avec : r(k) référence, Q(i) et R(i) sont des matrices des pondérations. Nous pouvons récrire ceci sous forme condensée :
2 2 ) ( ) ( ) ( ) (k Z k T k Q U k R V Où k) \ ( k) \ ( ) ( 2 1 N k z N k z k Z k) | (k r k) | ( ) ( 2 1 N N k r k T k) | 1 -N (k u k) | k u k U u ( ) ( et les matrices de pondérations Q et R sont données par :
) ( 0 0 0 ) 1 ( 0 0 0 ) ( 2 1 1 N Q N Q N Q Q , ) 1 ( 0 0 0 ) 1 ( 0 0 0 ) 0 ( u N R R R R
Les prédictions sont données par l équation (A.20) : )
(k
Z x(k) u(k 1) U(k) (A.21) En posant : (k) T(k) x(k) u(k 1) (A.22) On peut écrireV(k) const U(k)TG U(k)TH U(k)
où: G 2 TQ (k) et H TQ R (A.23) et ni F ni H dépendent de U (k).
Pour calculer U optimal, il faut calculer le gradient de )(k) V la solution (k G
H k
U( )opt 21 1 (A.24)
Nous utilisons seulement la partie de cette solution qui correspond au premier élément du vecteur, nous pouvons représenter ceci comme :
opt times N l l l opt I U k k u U ) ( 0 ,..., 0 , ) ( ) 1 ( (A.25)
A.3.2 Cas avec contraintes:
Le problème de la commande prédictive avec contraintes est de minimiser ) ( ) ( ) (k H U k G U k U T T (A.26)
avec les contraintes. Ce problème est de la forme:
t T
2 1
min (A.27)
qui est un problème standard appelé programme quadratique : QP quon peut résoudre numériquement en utilisant des algorithmes efficaces tels que la méthode ' active set'
AnnexeB
A.1 La linéarisation par retour détat du système (robot avec le joint
flexible):
Le modèle sécrit sous la forme suivante :
u J x x Jk x J F x x x x x Jk x J Mgl x J F x x x m m m m 1 sin 3 1 4 4 4 3 3 1 1 1 1 2 1 1 2 2 1 (B.1)
Pour mettre le système sous la forme (2.24 - 2.25) on applique le théorème (2.3), Donc if faut que le système vérifie les conditions suivants :
i) n n f g R ad g span , , 1 , ii) la distribution 2 2 , , nf n span g ad
G est involutive et a un rang constant égal à 1
n ,
Ou, d'une manière équivalente, si et seulement si :
iii) Les distributions G span g, ,adi , 0 i n 2
f
i sont involutives et de rang
constant égal à 1i Donc nous avons :
,
1
0
0
0
,
sin
3 1 4 4 3 1 1 1 1 2 1 1 2 m m m mJ
x
g
x
x
J
k
x
J
F
x
x
x
J
k
x
J
Mgl
x
J
F
x
x
f
(B.2)On peut aussi écrire (B.2) sous la forme :
. 1 . sin 4 4 3 1 4 3 4 2 3 1 1 1 1 2 1 1 1 2 x J g x x x Jk x J F x x x x x Jk x J Mgl x J F x x x f m m m m (B.3)
Pour vérifier i) if faut faire les calculs suivants :
, 1 1 , 1 , 1 0 1 0 4 3 2 2 4 2 1 1 1 2 3 4 2 2 3 2 1 4 3 4 2 1 2 4 3 2 x J F x Jk J F J x J k x J k J F x J k J f L g ad L g ad x Jk J F x J F x Jk J x J F x J F x Jk x Jk J f L g ad L g ad x J F x J f L g L g ad m m m m m m m m m m g ad f f f m m m m m m m m m m m m g ad f f f m m m g f f f f Donc on a : 4 3 2 , , ,ad g ad g ad g R g
span f f f , la condition i) satisfait,
2 2 2 2 2 0 , 0 , 0 , 2 2 2 2 G L L L L g ad g ad G L L L L g ad g G L L L L g ad g g ad g ad g ad g ad f f g g ad g ad g f g g ad g ad g f f f f f f f f f
2
G Involutive et a un rang constant égale à 3.La condition ii) est satisfaite.Léquation (B.1) devient : . 3 1 ,, 3 4 4 1 u x h L L x h L z i z z f g f i i (B.4)
On définit le retour détat v x h L L x h L L x h L u f g f g f 3 3 4 1 (B.5) on choisit la fonction h x x1
on définit la fonctionh x1 avech 0 0.et z T x et un difféomorphisme local défini
par : z T x h,Lfh,L2fh,L3fh z1,z2,z3,z4 , (B.6) . sin cos cos sin 1 3 4 3 1 1 4 2 1 1 3 1 1 1 1 2 1 1 2 1 2 1 1 1 1 2 2 1 1 1 2 1 1 1 1 4 m f g m m m f J Jk L L x J F x x Jk Jk x J kF x x Jk x J Mgl x J F J F Jk x J Mgl x J kF x J Mgl F x J Mgl h L (B.7) Avec : . sin cos sin 4 1 3 1 1 1 1 2 1 1 1 1 2 1 1 1 3 4 3 1 1 1 1 2 1 1 2 3 2 2 1 1 x Jk x x Jk x J Mgl x J F J F x Jk x J Mgl h L z x x Jk x J Mgl x J F h L z x h L z x x h z f f f (B.8)
A
.2 Linéarisation en entrée-sortie par retour détat (système robot avec le
joint flexible):
Le système est localement linéarisable en entrée-sortie par retour d état c.-à-d. Localement entrée-sortie équivalente à l équation (2.44) parce que 4.
Donc on peut écrire le système (B.1) sous la forme : 4 4 , 1 s s F ou v y (B.9)
avec la même expression de v .
A
.3 Calcul des contraintes pour le système (robot avec le joint flexible):
Nous avons léquation suivante :u x h L L x h L v v x h L L x h L L x h L u f g f f g f g f 4 3 3 3 4 1
Aussi x est borné les fonctions i L4fh x et LgL3fh x sont aussi bornées
Donc max 3 min max 4 min
min 3 min 4 max max L L h v L L h u L h h L v u u g f f f g f (B.10)
Pour une petite simulation ou un petit calcul (pour les systèmes simples) on peut trouver la valeur max de v équivalente à la valeur max de u, et en fait l optimisation pour les valeurs max et min de v. On obtient les contrainte sur lincrément de commande par : Pour t k vk L4fh x k LgL3fh xk u k (B.11) t k 1 v k 1 L4h x k 1 L L3 h x k 1 u k 1 f g f , Donc u k x h L L k u k x h L L k x h L L k x h L k x h L k v k v v f g f g f g f f 1 1 1 1 3 3 3 4 4 u x h L L u x h L L x h L v 4f g 3f g 3f (B.12)
Pour notre exemple LgL3fh x Cstdonc on a u x h L L x h L v 4f g 3f (B.13)
On fait les mêmes opérations que pour l équation (B.10), on calcule les contraintes pour la commande GPC et la commande MBPC avec la même méthode que lannexe C