Multiresolution pour la Visualisation Scientifique
Texte intégral
Figure



Documents relatifs
Rappelons que 2 matrices semblables ont le mˆ eme polynˆ ome caract´ eristique, et que le polynˆ ome caract´ eristique d’une matrice et de sa transpos´ ee sont identiques.. Un
Dans la deuxi` eme, on construit effectivement une suite de polynˆ omes qui converge uniform´ ement vers toute fonction continue.. Le m´ elange entre les parties analyse et les
Commentaires : C’est un sujet tr` es classique, o` u il est question d’´ equations diff´ erentielles, de s´ eries enti` eres, d’int´ egrales d´ ependant d’un param` etre,
I.A.1) Nous prouvons par exemple que si A est triangulaire inf´ erieure inversible, alors A − 1 est elle- mˆ eme triangulaire inf´ erieure. Il suffit alors de prendre la transpos´
Figure 4: ´ Evaluation de la qualit´e visuelle apr`es insertion r´eversible de la charge utile maximale dans l’image leba pour diff´erentes tailles de blocs.. Le syst`eme visuel
C’est une application du th´eor`eme de continuit´e sous le
– Lancez plusieurs Emacs, puis dans un autre terminal tapez killall emacs que constatez vous. – Lancez Firefox puis tapez Control + Z, faites de mˆeme avec gedit
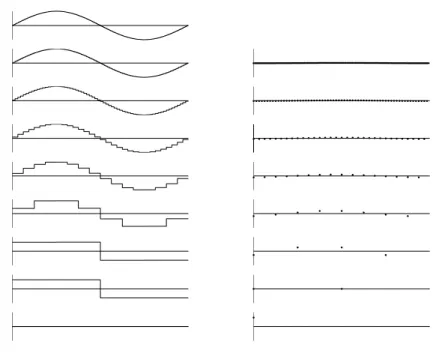
La premi`ere partie de ce chapitre porte sur les bases de l’analyse multir´esolution telles qu’elles ont ´et´e formul´ees par St´ephane Mallat dans [32]. Ces travaux ont
