A Graph Transformation-Based Approach for the Validation of Checkpointing Algorithms in Distributed Systems
Texte intégral
Figure


Documents relatifs
In a special case where each source refers to a single information item, set-valued belief functions decompose with respect to intersection and are thus multiple source
ise of that theorem was great: a probability of error exponentially small in the block length at any information rate below channel capacity.. Finding a way of
a Atomic force crite- b Sum of forces crite- c Atomic forces criterion and d Atomic force criterion of e Atomic force criterion and vertex split rion and vertex split volume
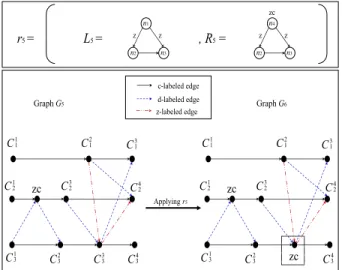
The graph grammar is based on transformation rules; those rules try to transform the class diagram in the implementation level, always in order to obtain at the end a usable
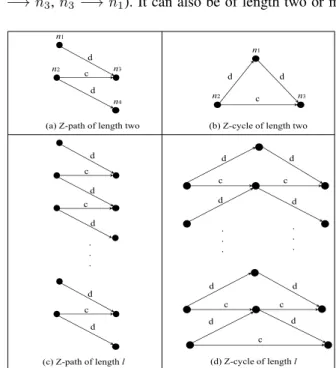
Informally, a global snap- shot is consistent if the set of checkpoints that compose it (one per process) accomplishes the following two constraints: first, all the local checkpoints
Rules applied on nodes closer to sensors can yield deductions faster compared to a centralized approach, both because they receive data earlier and because they process a smaller
Additionally, the existence of tools support such as AGG [RET12], GROOVE [Ren04], facilitate the operation of edition and offer different techniques for analysis purposes such as
Such graph rules are useful for prediction in dynamic graphs, they can be used as pattern features representing dynamic graphs or simply for gaining an insight into internal pro-
