Distributed Best Response Algorithms for Potential Games
Texte intégral
Figure
Documents relatifs
Roubens, Equivalent Representations of a Set Function with Applications to Game Theory and Multicriteria Decision Making, Preprint 9801, GEMME, Faculty of Economy, University of
To explore how large groups engage with nanotechnologies, we focus on the worldwide largest R&D spenders - groups which were selected because they already have research
For general games, there might be non-convergence, but when the convergence of the ODE holds, considered stochastic algorithms converge towards Nash equilibria.. For games admitting
Fortunately, this is possible to go further, observing that many of the previous classes (ordinal, (exact) potential, continuous potential, load balancing games, congestion games,
In our experiment the control did not produce results in line with the theoretical expectations (Shapley value, or even a payoff allocation residing in the
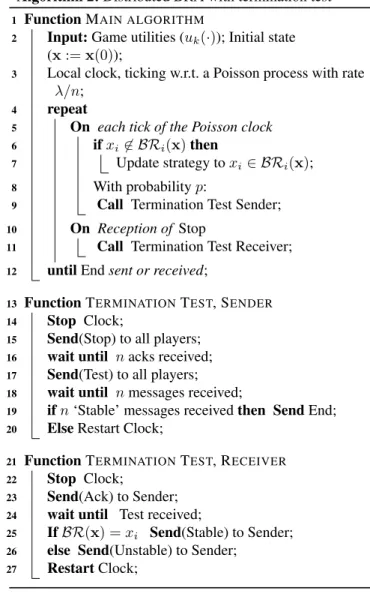
Under the Intersection Free Approximation, every time a new player who is not satisfied (in the algorithm, that correspond to a player not in L) has to compute its best response in
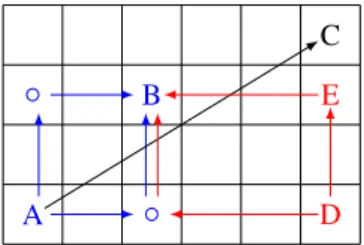
Player C (or a bot) can peek at A’s and B’s actions first, before deciding his/her moves.. Player C (or a bot) can peek at A’s and B’s actions first, before deciding
Player C (or a bot) can peek at A’s and B’s actions first, before deciding his/her moves.. Player C (or a bot) can peek at A’s and B’s actions first, before deciding
