Constance de largeur et désocclusion dans les images digitales
Texte intégral
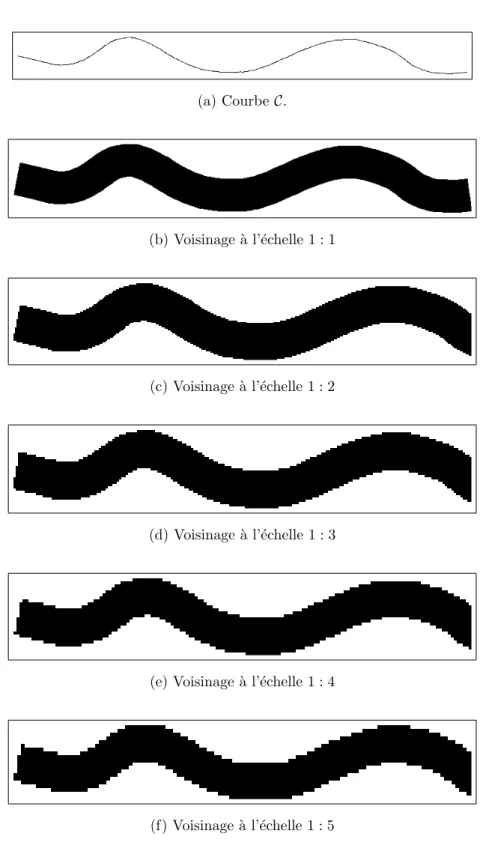
Figure
Documents relatifs
Or PQ, MN sont deux transversales réciproques du triangle wBD; la tangente à C', en B, limite de BD, s'obtiendra donc en menant, par B, une droite partagée en deux parties égales par
[r]
Cette question a été relativement bien traitée par l’ensemble des candidats, ce qui est assez remarquable par rapport aux éditions précédentes, même si certains placent
Rappelons que 2 matrices semblables ont le mˆ eme polynˆ ome caract´ eristique, et que le polynˆ ome caract´ eristique d’une matrice et de sa transpos´ ee sont identiques.. Un
Dans la deuxi` eme, on construit effectivement une suite de polynˆ omes qui converge uniform´ ement vers toute fonction continue.. Le m´ elange entre les parties analyse et les
Commentaires : C’est un sujet tr` es classique, o` u il est question d’´ equations diff´ erentielles, de s´ eries enti` eres, d’int´ egrales d´ ependant d’un param` etre,
I.A.1) Nous prouvons par exemple que si A est triangulaire inf´ erieure inversible, alors A − 1 est elle- mˆ eme triangulaire inf´ erieure. Il suffit alors de prendre la transpos´
Bien sˆ ur les ´ ecritures des deux signataires devront apparaˆ ıtre de mani` ere significative dans la copie. Probl`
