Dual-energy electromagnetic modeling, with application to variable reluctance motor analysis
Texte intégral
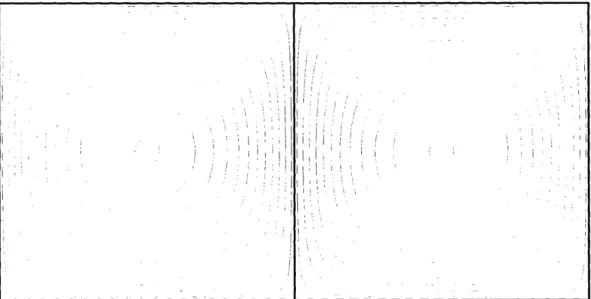
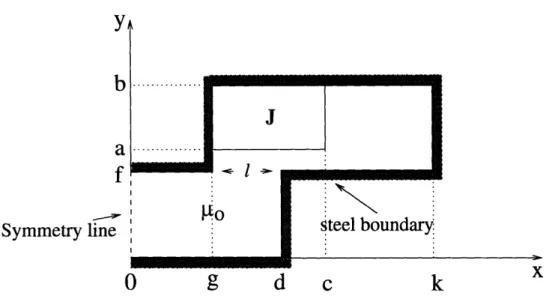
Figure




Documents relatifs
overseas departments and territories, hydroelectricity, marine energy, bioenergy, solar power and photovol- taics, thermal solar power, wind power, the energy produced from
Summary. — The evolution from 2000 to 2050 of the needs in concrete, steel, aluminium and copper to build the infrastructure of electricity generation is mod- elled for the scenarios
[7] , New fewnomial upper bounds from Gale dual polynomial systems, Moscow Mathematical Journal 7 (2007), no. Khovanskii, A class of systems of transcendental
BOUNDS ON THE EXCESS CHARGE AND ON THE NUMBER OF OCCUPIED ANGULAR MOMEMTUM CHANNELS.. The purpose of this section is to find a bound on the
form a basis for the r’4 irreducible representation of the cubic group, one must look for harmonic polynominals belonging to T4 : : those of the lowest degree
Large-q series for the bulk, surface and corner free energies of the chromatic polynomial on the square lattice, in terms of the variable z = 1/(q −
Vogelius , Boundary integral formulas for the reconstruction of electromagnetic imperfections of small diameter, ESAIM: Cont.. Volkov, Correction of order three for the expansion of
decoded from the reservoir dynamics. o denotes the visual observation provided by the environment after being modified by the sequence of atomic motor commands. σ denotes the
