A new criterion for the evaluation of the velocity field for rainfall-runoff modelling using a shallow-water model
Texte intégral
Figure

Documents relatifs
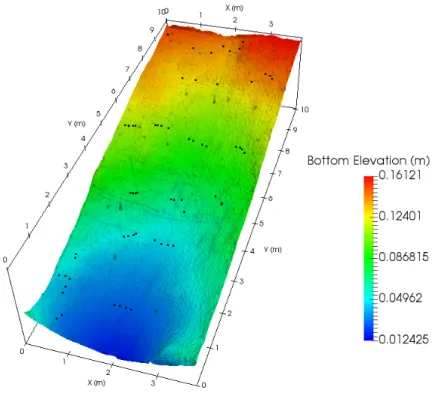
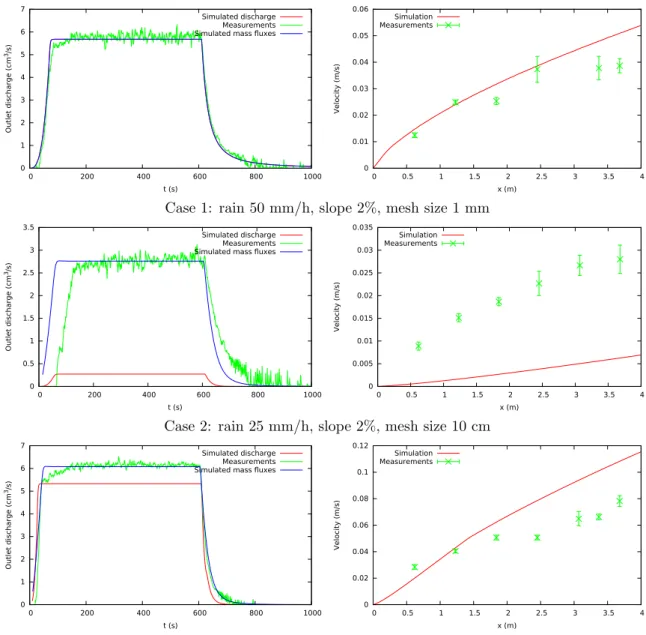
In the previous section, the numerical experiments show that our new model (2.4) with the additional friction coefficient to represent the furrows gives good results on the water
Due to the progressive compaction of volcanic materials with pressure, temperature and time (e.g. This suggests that the heterogeneity of these structures should also
On the other hand, the Criel s/mer rock-fall may be linked to marine action at the toe of the cliff, because the water level reaches the toe of the cliff at high tide and the
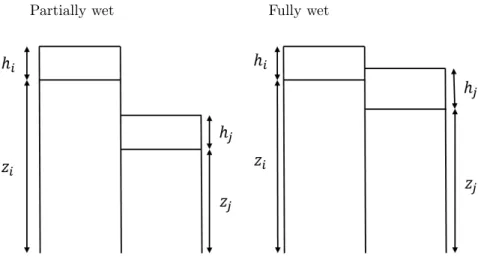
D’après les tableaux (Tableau 1 et Tableau 2), les résultats des deux méthodes de Saint Venant (version standard et version modifiée) pour le cas de sources profondes dans
Title Page Abstract Introduction Conclusions References Tables Figures J I J I Back Close Full Screen / Esc.. Print Version
Its contamination by a nematicide applied in banana cropping (Charlier et al, 2009, Journal of Environmental Quality, 38, 3, p.1031-1041) showed two successive phases, which
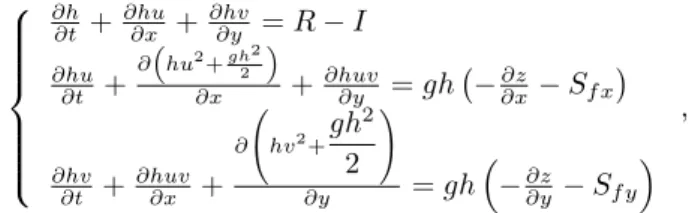
The aim of this note is to present a multi-dimensional numerical scheme approximating the solutions of the multilayer shallow water model in the low Froude number regime.. The
