An Interval Extension Based on Occurrence Grouping: Method and Properties
Texte intégral
Figure
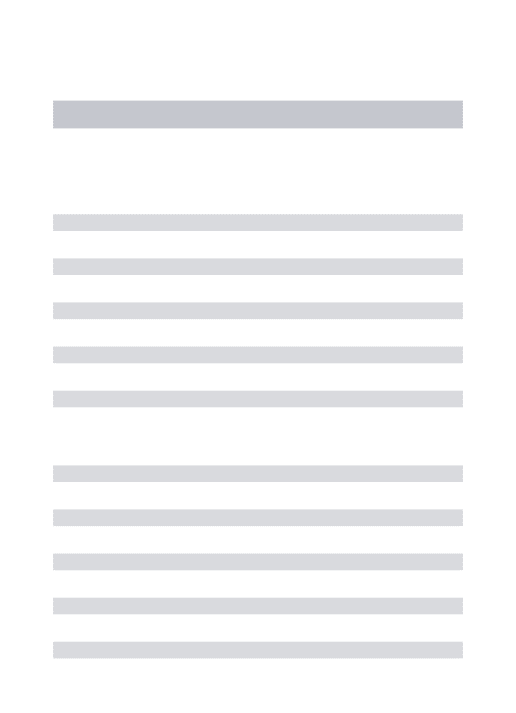
![Table 1: Different interval extensions compared to [ f ] og System [ f] n [ f] t [ f ] h [ f ] m [f ] mr [f ] mr+h [f ] mr+og Brent 0.857 0.985 0.987 0.997 0.998 0.999 1.000 ButcherA 0.480 0.742 0.863 0.666 0.786 0.963 1.028 Caprasse 0.602 0.883 0.960 0.85](https://thumb-eu.123doks.com/thumbv2/123doknet/13107181.386455/17.892.258.706.748.1081/table-different-interval-extensions-compared-brent-butchera-caprasse.webp)
Documents relatifs
In 1980, artist, curator and writer John Watt produced, curated and contributed to Television by Artists, a series of video art that was aired on Rogers Cable TV between M ay
Also use the formulas for det and Trace from the
.} be the set of positive integers which have the last digit 1 when written in base 10.. Determine all Dirichlet characters modulo 8 and
[r]
.} be the set of positive integers which have the last digit 1 when written in
Sensor and Actuator Fault Isolation Using Parameter Interval based Method for Nonlinear Dynamic Systems. Zetao Li, Boutaib Dahhou, Gilles Roux, Jing Yang,
Finally, in Section 7, experiments show that this new occurrence grouping interval extension function compares favorably with existing ones and show its benefits for solving systems
First, Occurrence Grouping has been implemented to be used in a monotonicity- based existence test (OG in Table 1), i.e., an occurrence grouping transform- ing f into f og is
