ETUDE ET SIMULATION DES EFFETS PARASITES DANS LES INDUCTANCES PLANAIRES
Texte intégral
Figure
![Figure II.6: Champs créés dans une inductance planaire spirale [2]](https://thumb-eu.123doks.com/thumbv2/123doknet/13168424.390409/32.892.251.642.586.788/figure-ii-champs-créés-inductance-planaire-spirale.webp)
![Figure III.2: Chronogrammes de fonctionnement des tensions et courants dans un convertisseur Buck [22]](https://thumb-eu.123doks.com/thumbv2/123doknet/13168424.390409/38.892.201.712.315.982/figure-iii-chronogrammes-fonctionnement-tensions-courants-convertisseur-buck.webp)
Documents relatifs
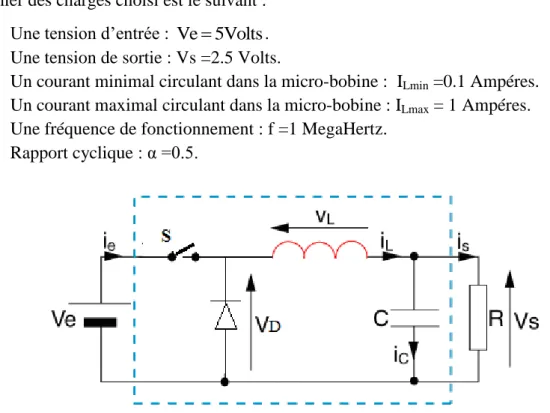
NB : le générateur n’est pas idéal mais modélisé par un générateur idéal en série avec une résistance (typiquement de 50 W), aussi la tension indiquée est rarement atteinte
Si n est un entier au moins égal à 2, on considère dans le plan les n 2 points de coordonnées (i, j) avec.. Trouver pour n variant de 2 à 10 de bonnes valeurs pour
Une batterie de condensateurs placée entre les broches cinq et six du CI permet de sélectionner des fréquences «inconnues» que les élèves auront à déterminer à l’oscilloscope
Le but de cette partie est de voir le comportement en hautes fréquences d’un montage à source commune déjà étudié en TP (cf TP2), à l’aide d’un logiciel
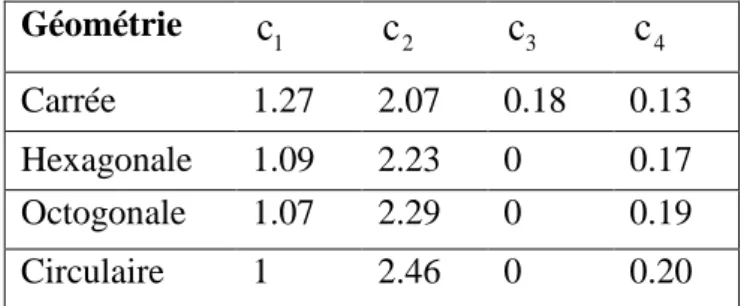
L’effet de ces derniers paramètres est plus drastique sur le rendement que sur le facteur de courbe.. Des expres- sions semi-empiriques en fonction de la
Ce TP a pour objectif de construire et d’interpréter un modèle équivalent d’une bobine à noyau de fer doux permettant de décrire son comportement dans différents domaines
Matériel : 2 bobines (1000 et 500 spires), résistance ajustable, oscilloscope, interface d’acquisition primo avec modules ampè- remètre et voltmètre, GBF, 2 multimètres, fils..
Une méthodologie générale et non-intrusive a été présentée pour construire un modèle numérique réduit adapté à la prévision des déplacements globaux (sur les parties raides
