Determining Shape and Reflectance
Using Multiple Images
by
William Michael Silver
B.S., Massachusetts Institute ofTcchnology (1975)
Submitted in Partial Fulfillment of
me
Requirements for theDegree of
Master of Science
at the
Massachusetts Institute of Technology June
1980
__..--;
-Signature redacted
Signature of Author _ _
~=, ~ ~ ~
-Dcp,1rtmcnt of Electrical Engineering :ind Computer ScienceSignature redacted
tv1ay 9, i980 Certified b Y = = = = = 1 = = = -Accepted by _ _ _ _ _ARCHIVES.
U (") [ \ '. () . '- ·1...:i I..J I f..• C:• 1Q A • ...JV' UBRAR!ES Berthold K. P. Horn Thesis SupervisorDetermining Shape and Reflectance
Using Multiple Images
by
William Michael Silver
Submitted to the Department of Electrical Engineering and Computer Science on May 9, 1980 in partial fulfiliment
of the requirements for the Degree of Master of Science in
Electrical Engineering and Computer Science
ABSTRACT
This thesis is an investigation of photometric stereo, a practical technique for determining an object's shape and surface reflectance properties at a distance. It makes use of multiple images of a scene, recorded from the same viewpoint but with different illumination. It is a photometric technique because it makes direct use of the irradiance measurements recorded in an image to provide constraints on dic possible interpretations that can be assigned to a given surface element. Output is in the form of an array of surface normal vectors and a small number (0, 1, or 2) of arrays of surface reflectance parameters, all registered with the original image arrays. The &alculation itself, after an initial calibration step, is purely local and may be implemented by table lookup, allowing real-time performance. Possible applications include industrial automation, analysis of planetary explorer images, and other situations where the ilUmination can be controlled or at least measured.
The research is divided into two components, one theoretical and the other experimental. The pioneering work of Woodham is presented and extended to handle certain types of non-uniform surface cover. Two models of non-uni form surfaces are investigated. The simplest combines a known reflectance function with an unknown multiplicative reflectance factor, called Ute albedo. The more sophisticated allows, in addition to the albedo, an unknown mixture of two known reflectance functions, for example a matte and a specular component.
The experimental part of this research is a detailed quantitative evaluation of a working implementa-tion of photometric stereo. The purpose of the experiment is not only to show how well such a system can
be expected to work, bUt also to give specific algorithms and procedures that can be used to reduce the
theory to practice.
Thesis Supervisor: Professor Berthold K. P. Iorn
Title: Asscolate Professor of Computer Science and Engineering
Ac know ledgements
I would like to thank my thesis supervisor, Professor Berthold Horn, for suggesting this research topic, for
his continued support and enthusiasm throughout this lengthy effort, and for many valuable suggestions
for and criticisms of this material.
This research would not have been possible without the facilities and environment provided by the
M.I.T. Artificial Intelligence Laboratory. The skills of many people of diverse interests combine to make
this unique and stimulating atmosphere. For this I am gratefil to professors, engineers, students and
hackers too numerous to mention.
I owe a great deal to my parents, Edward and Barbara, for encouraging ine to persue those activities
that I enjoy, for considerable financial support, and for a large dose of good judgement, understanding,
and love throughout my life.
Finally, a special note of gratitude to Barbara-Joan, for being there all the time, for being slightly
crazy, and for never letting me forget that there are other things in life besides computers.
Table of Contents
Abstract 2 Acknowledgements 3 Table of Contents 4 List of Figures 7 1. Introduction 91.1 Machine Vision-The Problem 10
1.2 Aporoaches to Early Visual Processing 12
1.2.1 Classical Image Analysis 12
1.2.2 Marr's Approach to Early Visual Processing 14
1.3 Development of the Photometric Approach 15
1.4 Overview of the Thesis 16
2. Shape From Shading 19
2.1 Representing Shape 20
2.2 Radiometry-Understanding Image Irradiance 25
2.3 Monocular Shape-from-Shading 28
2.4 Photometric Stereo 29
2.5 Photometric Stereo vs. Binocular Stereo 33
Table of Contents
3. Non-Uniform Surface Material 35
3.1 The Multiplicative Reflectance Factor 36
3.2 Lambertian with Variable Albedo 38
3.3 Variable Mixture of Two Reflectance Functions 38
3.4 Glossy Surfaces 40
3.5 Statistical Analysis of Unknown Surfaces 42
4. The Experiment 44
4.1 Goals and Approach 45
4.2 The Setup 46
4.3 Basic Image Processing 49
4.3.1 Body Finding 51
4.3.2 Image Registration 51
4.3.3 Image Filtering 52
4.3.4 Finding the Center and Radius of the Objects 52
4.4 Calibration-Determining the Reflectance Maps and Making the Lookup Table 53
4.4.1 The Mapping from Grey-Levels to Table Indices 55
4.4.2 The Format of the Lookup Table 56
4.4.3 Filling in Nearby Entries 57
4.5 Running Photometric Stereo 58
4.6 Gradient to Depth Conversion 59
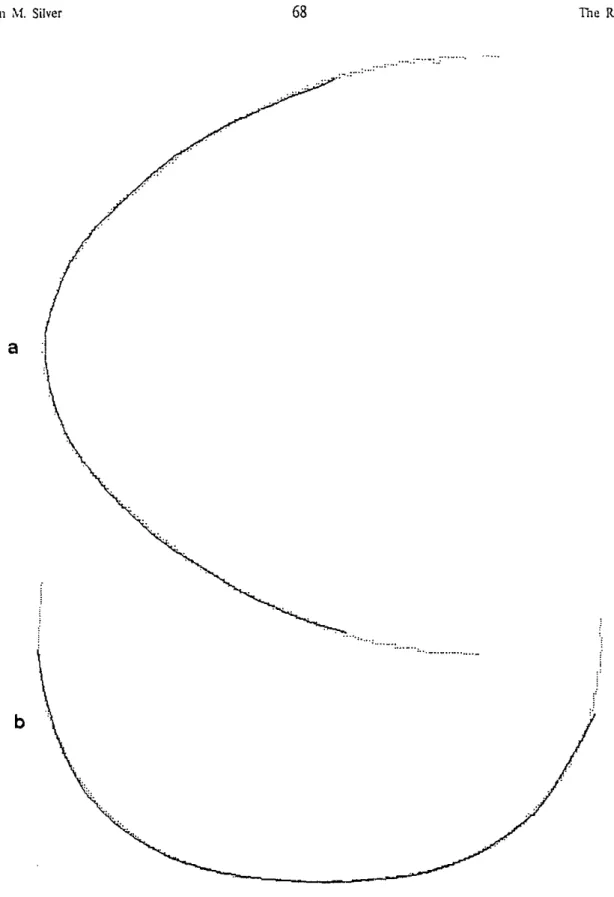
4.7 The Profile Comparisons 60
5. The Results 63
5.1 Complete Results Using the Basic Parameter Settings. 64
5.2 The Effect of Tabie Size 72
5
William M. Silver
5.3 The Effect of the Intensity Bias 75
5.4 The Effect of Interpolation 79
5.5 Finding Surface Discontinuities 82
5.6 Discussion 91
6. Summary and Concluding Remarks 93
Appendix A: On Gradient Space and Reflectance 97
A.1 Gradient Space 97
A.2 Reflectance Functions and Reflectance Maps 100
A.3 Lambertian Surfaces 104
Appendix B: Au->malic Profile Registration 106
B.1 The Procedure 107
B.2 Conic Dissection 108
B.3 Least-Squares Best-Fit Conic Section 109
References
6
Table of ContentsList of
Figures
2.1. Definition of Viewing Geometry 22
2.2. Beam Geometry for Specifying Reflectance 27
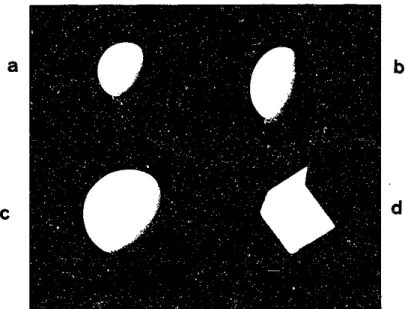
4.1. The Objects Used in the Experiment. 46
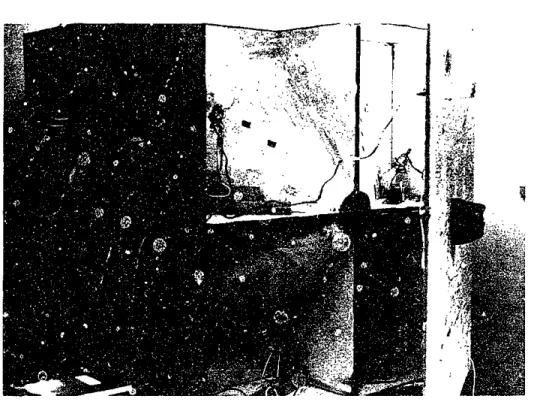
4.2. The Plywood "Studio" 47
4.3. A Typical Scene Photographed in the Plywood Box 48
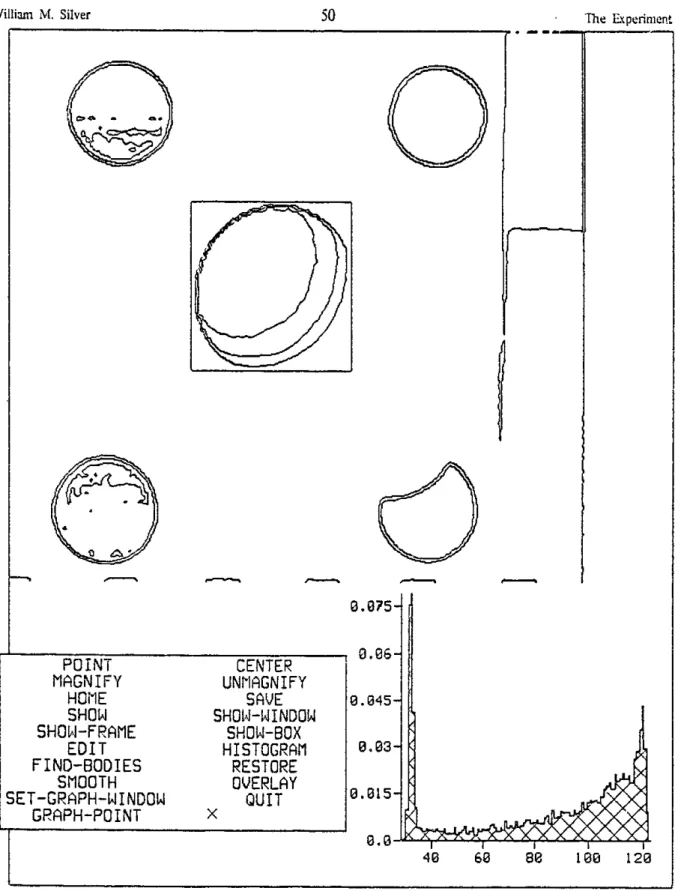
4.4. The Lisp Machine in Use 50
5.1. Relief Plot of the Egg 66
5.2. Relief Plot of the Knob 67
5.3. Egg and Knob Profile Comparisons 68
5.4. Error Regions Produced by the Reflectance Maps 69
5.5. The Angular Error Statistics 71
5.6. Distance Distribution for the Egg and Knob 70
5.7. Statistics of the Integral of Gradient Around a Unit Pixel 73
5.8. Angular Error Distributions for Different Table Sizes 74
5.9. Mean Angular Error vs. Table Size 72
5.10. Relief Plot of Egg using Small Table 76
5.11. Egg Profile Comparison using Small Table 77
5.12. 1)istribution of g, from the Sphere for Different Table Sizes 78
5.13. Angular Error vs. View Angle for Different Intensity Biases. . 80
William M. Silver
5.14. Mean Angular Error vs. Intensity Bias 79
5.15. Error Regions with Optimal Intensity Bias 81
5.16. Angular Error Distributions for Different Table Sizes with Interpolation 83
5.17. Mean Angular Error vs. Table Size, with Interpoaltion 84
5.18. Relief Plot of Egg using Small Table with Interpolation 85
5.19. Egg Profile Comparison using Small Table with Interpolation 86
5.20. Distribution of g from the Sphere for Different Table Sizes with Interpolation 87
5.21. Relief Plot of Pyramid 88
5.22. One View of the Pyramid 89
5.23. The Smoothness Functions gi Applied to the Pyramid 90
CHAPTER 1
INTRODUCTION
This thesis is an investigation of a practical technique for determining an object's shape at a distance.
The investigation has both a theoretical and an experimental component. On the one hand, methods for
extending the range of surfaces for which the technique may be applied are developed. On the other,
construction and detailed quantitative analysis of a working implementation add weight to the use of the
term, "practical".
The methods presented herein are a natural result of a photometric approach to certain aspects of
machine vision. The central observation of this approach is that:
grey-levels recorded by an imaging device are measurements which result from real physical
processes. Such a measurement may be viewed as a constraint on the possible interpretation
of the surface element that gave rise to it.
A detailed understanding of the physical processes underlying image formation has led to methods for
determining object shape and, to a limited extent, surefCe material, by making direct use of the grey-levels
recorded in an image.
Wiffiain M. Silver
Photometric techniques may be applied when imaging variables, such as illumination and viewing
geometry, can be controlled or at least are known. Examples include many problems in industrial
automa-tion, where a designer may be free to set tip conditions necessary to achieve a desired result, and analysis
of images recorded by planetary explorers, where the positions of the sun and camera may be precisely
determined. The approach is of little value for the unconstrained vision problems facing, flor example, a
mobile, self-supporting robot or biological entity.
The methods explored here all make use of multiple images of a scene, taken from die same
view-point but with varying illumination. The basic idea, called photometric stereo, was first described in
[Woodham 1978], and represents a major advance in the photometric approach. In situations where the
necessary images can be obtained, photometric stereo avoids many of the serious problems associated with
previous techniques. In addition, it is probably the least comiputationally expensive method available for
determining object shape. Implementations on present-day minicomputers would be quite capable of
real-time performance. Special-purpose hardware could conceivably run at video rates.
Virtually all of the fundamental ideas which form die basis of this research were initially developed
by others. '[he contribution of this work, if any, lies in the attempt to extend the usefulness of these ideas,
and the presentation, for the first time, of a thorough analysis of a working system.
1.1 Machine Vision-The Problem
Vision, artificial or natural, may be defined as a process whereby object properties relevant to a
particular application are determined by an analysis of the spatial, spectral, and temporal distribution of electromagnetic energy radiated by those objects. (Let us immediately strike the spectral and temporal
components from further consideration.) Several factors combine to make that analysis both difficult and
cornputationally expensive.
First is the slicer quantity of information present. For example, a standard vidicon camera, which is
William M. Silver
not considered a very high resolution device, could produce over 7 million measurements every second,
given an interface that could absorb data at that rate. With the basically serial hardware that is typically
available, evon the most elementary operations will be time consuming.
The second difficulty is that the physical quantity being measured, scene radiance, arises from the
interaction of several factors, some of which are properties of the objects being viewed and some of which
are not. The influences of those which are- shape and surface material-must be separated from each
other and from the influences of those which are not-illumination and viewing geometry.
Third, the transformation from the three-dimensional object space to the two-dimensional image
space introduces difficulties. Information is lost in such a mapping-a given image will typically have
many physical interpretations. Additional information must be brought to bear if we are to have any
hope of finding the "correct" interpretation. Often, additional information is obtained in the fori.. of
multiple images (this work is an example). By far the most important, if not universally accepted, source
of additional information, however, is prior expecatlion. In this work, for example, prior knowledge is
represented by a function called the reflectance map, which incorporates information about illumination,
viewing geometry, and surface photometry. Previous researchers in machine vision often made explicit use
of the fact that their images were of scenes containing only plane-faced polyhedra [G uzman 19681, [Waltz
1975]. In human vision, the influence of prior expectation pervades virtually all stages of visual processing.
The proper use of prior expectation is difficult. A balance must be struck between using so little
that one's methods apply to any situation but yield little information, and relying on so much that they
would tell one everything if only they applied to the situation at hand (this work tends towards the latter
extreme). In addition, a system should be capable of producing some resulIts even if its prior expectations
are not exactly met.
Loss of information is not the only problem caused by the transformation from object space to image
space. Features in an image may just be artifacts of the projection geometry, not related to any real object
William A. Silver
features. An example is an occlusion contour, which is a curve separating surface elements tilted towards
the viewer from those tilted away from the viewer.
The final difficulty we note here is that the properties of interest in a particular situation may be so
far removed conceptually from the actual input data that many complex levels of description must be built
tip before such properties can be determined. A good example of such a property is the identity of a
human face. Somehow, a human can quickly and without apparent effort extract a friend's name from
what is essentially a two-dimensional array of numbers produced by his retina. Most of the intermediate
steps are quite beyond our understanding. What is clear, however, is that these issues of description and
representation are among the most important, and difflicult, of the problems in vision research (see, for
example, [Marr 1978]).
1.2 Approaches to Early Visual Processing
This work is concerned with the earliest level of visual processing-that level which has as its input
the raw irradiance values recorded in an image. It is expected that a system built along the lines described
here would be incorporated into a larger system designed to satisfy some higher-level needs.
There is a basic philosophy behind our approach to early vision. To help appreciate this philosophy,
we will compare it to others that have appeared in the machine vision community.
1.2.1 Classical Image Analysis
Much of the classic research in machine vision was concerned with the interpretation of scenes
con-taining plane-faced polyhedra (often called the "blocks-world"). Researchers divided the vision problem
into two sub-problems. with (initially) a wel!-defined bO ndlary-inlage analysis and scene analysis.
Simply stated, the purpose of image analysis is to take the raw grey-levels and produce a symbolic
descrip-tion of the scene by extracting image features (line-segments in the blocks-world) [Binford & I lorn 19731,
William M. Silver
[Shirai 1975]. Scene analysis would then interpret this symbolic description in terms of goals dictated by
some specifc application.
It is very tempting to refer to the present work as an exercise in image analysis. It can also be very
misleading, for about the only similarity between classical image analysis and this work is that they both
have raw images as their input. The following are the major differences in approach:
Data Compression: An important result of classical image analysis is a great reduction in the amount
of information present. This was considered necessary to make the computational load on subsequent
scene analysis managable. Our method produces a local description of surface orientation and reflectance
at each data point in the original images. If anything, the amount of data has increased.
Symbolic Descriptions: A major goal of classical image analysis was dte generation of symbolic
descriptions, typically in the form of a line drawing. Her, we produce strictly numerical results-local
surface normal vectors in a viewer-ceatered coordinate system.
Image Features: Classical image analysis is concerned with finding 1eatures that are properties of the
image. As noted earlier, such features are often artifacts of the imaging process and bear no direct relation
to properties of the objects themselves. Thus, the symbolic descriptions passed up to the scene analysis
system still contain the combined effects of illumination, viewing geometry, surface material, and shape.
This significantly complicates subsequent analysis, because most of the intormation that could have been
used to separate these effects has been thrown away. In contrast, here the goal is to directly extract features
which are properties of the objects themselves. T'he results have the effects of illumination and viewing
geometry removed, and the effects of surface reflectance and shape appearing explicitly. ''his greatly
simplifies further analysis, because we are dealing with descriptions of objects rather than images.
To summarize: In classical image analysis, we extract those image'features that seem relevant, and
throw everything else away, yiciding a symbolic description of the image. Here, we try to use all of the
information contained in an image to produce a quantitative description of the objects that gave rise to the
William M. Silver
image.
The above discussion should not be viewed as arguing that our methods are necessarily "better"
than previous ones, rather just that the approach is different. We require explicit prior knowledge of
illumination, viewpoint, and surface photometry before our techniques can be applied. Such knowledge
in often not available, and in such cases the more traditional approach to image analysis is really all we
can do. There are enough cases where the information is available, however, to justify developing the
photometric approach.
1.2.2 Marr's Approach to Early Visual Processing
Marr's school is concerned with the relatively unconstrained situations facing biological vision
sys-terns, where explicit knowledge of the imaging variables is not available. Since their goals and assumptions
are different from ours, it is diicult to compare the two approaches directly. Still, similarities between
the two approaches are evident from the representations that Marr has developed to explain early visual
processing [Marr 1976], [Marr 1978](recall the importance of representation, noted above).
Marr observes that the early symbolic representations used in vision should be influenced primarily
by what it is possible to compute, leaving what it is desirable to compute to later levels. Consequently,
his earliest representation, called the primal sketch, is a description of primitive features of a raw
hmage-intensity changes and local geometry. Marr shares our view (in contrast with classical image analysis) that as much information as possible should be extracted from an image before discarding it. In fact, Marr has
shown that the primal sketch contains most of the information present in the original image [Miarr 1978].
A program was written that could produce a reasonable r&construction of an image from its primal sketch.
The next level representation used by Marr is called the 2{-D sketch. It is a quantitative,
viewer-centered representation of object shape, which contains local numerical descriptions of surface orientation
and depth, along with contours of surface discontinuities. Although it is determined by totally difTerent
William M. Silver
means, it is virtually identical to the representation produced by photometric stereo.
1.3 Development of the Photometric Approach
The idea that the irradiance measurements recorded in an image can be used to determine object
shape is not new. The first such attempt was reported by van Diggelen in a 1951 paper concerned with
the hills in the Maria of the Moon [van Diggelen 1951]. These features were too small to be analyzed
by their cast shadows, the traditional method for determining the heights of features on the Moon. Van
Diggelen did not use the surface reflectance properties of the Maria, so his methods could be applied only
to small regions near the terminator1, where the view angle and the phase angle2 could be considered
constant. Interestingly, van Diggelen had the basic idea behind photometric stereo in his paper, but failed
to develop it. He rejected using two images taken with the sun in different positions, because a lunar
surface element could not be near the terminator in both images.
Although van Diggelen did not use them, the photometric properties of the Moon have been known
at least since 1929, when they were measured by [Fesenkov 1929]. Finally, [Rindfleisch 19661 showed
how these specific properties led to an exact solution for surface elevation from a single image. He
applied his method to images returned by the Ranger spacecraft, and speculated that there should be
other photometric properties which give rise to exact solutions.
Rindfleisch's speculations were confirmed when [Horn 1970J, showed how the shape-from-shading
problem could be solved for virtually any surface reflectance function (non-isotropic, and highly specular
surfaces still could not be handled). His method involved the somewhat tedious numerical solution of a
nonlinear first-order partial differential equation. The technique was demonstrated using a crude
imnage-dissector camera interfaced to a PDP-6 computer.
11110 boundary between the illuminated and the dark hemispheres.
2The angle between rays from a lunar surface element to the Earth and Sun.
William NI. Silver
[Woodham 19731 elaborated on Horn's results, by showing how assumed monotonicity relations,
such as convexity or concavity, could be used in conjunction with a single image to determine object
shape, without requiring Horn's numerical solution. More significantly, that report contained a description
of a new technique, photometric stereo, which could determine object shape from several images taken
from the same viewpoint but with different illumination. The new method is faster, more accurate, and
requires fewer assumptions than previous methods.
[Ikeuchi and Horn 1979] showed for die first time how photometric stereo could be applied to
per-fectly specular surfaces, by using specially designed extended light sources. The result is important in
many industrial settings, where highly specular metallic objects must be handled.
All of the above methods assume uniform surface material, probably their most significant limitation.
[Horn et al 1978] showed how to relax this assumption slightly, by allowing a multiplicative relectance
factor which varies across die surface. This work attempts to extend these ideas, by developing a more
complex model of the way a surface can be non-uniform (Chapter 3).
1.4 Overview of The Thesis
Chapter 1 introduces the thesis and illustrates its relationship with related research efforts. The work
is presented as a problem in early machine vision. Reasons why it is difficult to build seeing machines
are noted. Our approach to early vision is compared with others that have appeared. The historical
development of this appraoch is traced.
Chapter 2 presents the basic theory behind photometric shape-from-shading methods in general,
and photometric stereo in particular. We see that an individual irradiance measurement constrains the
orientation of die surfce element that gave rise to it, but not enough to uniquely determine it. '[he
various photometric niethods that have appeared may be characterized by die way in which they seek to
determine the additional constraint needed to find a unique solution. Before this can be done, however,
William A. Silver
concepts we have been using informally (such as shape) must be made precise, and relevant tools must be
developed (gradient space, the reflectance map). Since these ideas have been presented in at least a dozen
places, only the briefest attention will be given to them at the beginning of this chapter. For the benefit of
the uninitiated, a more thorough development is given in Appendix A.
Chapter 3 develops methods for dealing with non-uniform surface material. First the simple
"multiplicative reflectance factor" model is presented. The interesting simplification that occurs when
this model is applied to lambertian reflectors is discussed. Next, the "variable linear combination of two
reflectance functions" model is developed. Again, an interesting simplification occurs when one of the
reflectance functions is lambertian (although this case is much different than the first case). Finally, a promising technique is presented for dealing with situations when surface photometry is unknown and
cannot be measured directly.
Chapter 4 describes in detail the experiment that was perfonned-iks goals, the experimental setup,
and how the data were processed. Chapter 5 gives the results of the experiment. It includes many graphs
and charts, of both a qualitative and quantitative nature, showing the effects of various parameters that
were investigated. This information is then put into words, and its significance is discussed. Note: A casual
reader
just
interested in an overview of the expreiment and a summary of the results should read sections 4, 4.1, 4.2, 5, and 5.6, and ignore everything else in Chapters 4 and 5.Chapter 6 presents a brief summary of the work along with some concluding remarks.
Appendix A gives the details of gradient space and ihe reflectance map promised in Chapter 2. It
also discusses the lambertian model of reflectance, which has been studied extensively and is necessary for Chapter 3. With the exception of the results on illumination of lambertian surfaces, all of this Appendix is
well known in the vision community and has been reported many times elsewhere.
Appendix B gives the details of a highly effective technique for automatically registering simple
profiles for shape comparison. The rotation, scale, and translation necessary to align two sinmilar profiles is
William M. Silver 18 Introduction
determined using best-fit conic sections. The method was used as part of the check on the performance of photometric stereo, as described in Chapters 4 and 5.
CHAPTER 2
SHAPE FROM SHADING
If we are to determine object shape from image irradiance, we must first have two things. One, we need
a precise definition of shape. As noted by Marr (see Section 1.2.2), such a definition will be motivated more by what it is possible to mCasure than what might be ultiiatly desirable. Thus we will end up with
a viewer-centered representation, rather than an objeci-cenaered representaion (which would simplify later
operations such as object identification). Shape will be defined as a collection of surface normal vectors specifying the orientation of small elements of the visible surface. Gradient space, introduced to machine vision in [ufhnan 1971], will be used to represent orientation.
Second. we need to know the relationship between an object's shape and its image. How does an individual surface element give rise to a grey-level in an image? Put another way, how does an irradiance measurement constrain the possible interpretations that may be assigned to the surflce element that gave rise to it? 'he reflectance map, introduced in [I lorn 19771, gives image irradiance as a function of surface orientation for a fixed illumination, viewpoint, and surface photometry.
The reflectance map allows us to write an equation for orientation.at each point in an image. Since
Shape From Shading
orientation has two degrees of freedom, this gives us one equation in two unknowns. Several techniques
have appeared for providing the additional information necessary to detennine orientation uniquely.
The monocular methods make use of assumptions about the surface, such as smoothness or
knowledge of surface topology, to provide the additional constraint. The goal is to find a global solution
that satisfies both the imaging equation and the surface assumptions. The methods are global
computa-tions because the interpretation eventually assigned to a surface element depends not only on its own
image irradiance, but on the irradiance of the rest of the surface as well.
Photometric stereo, the method of primary interest here, provides the additional constraint by using
multiple images of the scene, taken from the same viewpoint but with different illumination. Since the
viewpoints are the same, the correspondence between pixels' is trivial. Thus, two images give two
equa-tions in two unknowns at each point, constraining the orientation to a finite number of possibilities (since
the equations are, in general, nonlinear). Additional images may be used to make the solution unique,
and handle shadows and non-uniform surfaces, as will be seen. Photometric stereo is a localcomputation
because the interpretation assigned to a surface element is independent of the irradiance of the rest of the
surface.
2.1 Representing Shape
An early vision system can only produce information about surfaces it can see. Ultimately, of course,
a vision system should provide information about objects which is independent of viewpoint, but this
must be reserved for later levels of processing. Thus, what we seek here is a precise description of the
visible sutfaces of a scene, from the viewpoint of the image-forming system.
Any visible surface may be described completely by giving the distance from the viewer to the
sur-face as a function of direction from the viewer. For example, in a spherical coordinate system centered at
tPicture elements, points at which individual irradiance measurements are made in
a digitized image.
20
Shape From Shading
the viewer we can wrtie:
r =S(0, 0), (2.1)
where the function S gives distance to the surface for any azimudh 0 and elevation
#.
Other useful measures include the orientation of small surface elements, described by normal vectors, and contoursof surface discontinuity. Together, these form the 21-D sketch, as noted in section 1.2.2. In fact, these
three pieces of information are interrelated-informally, depth is the integral of orientation within regions
bounded by surface discontinuities.
The above general case, where a surface is specified by distance as a function of direction, may be
simplified greatly by assuming that the object's size is small compared to its distance from the viewer. This
assumption is desirable for several reasons. It insures that the viewing direction is constant over the
sur-face of the object, a prerequisite for using the reflectance map. It simplifies the mapping from object space
to image spacc-the perspective projection performed by an image-forming system may be approximated
by an orthographic projection. It allows the visible surface to be specified in cartesian coordinates, which
in turn simplifies the specification of surface normal vectors. Thus, the distant viewer assumption will be
implicit in all that follows.
Set up a cartesian coordinate system with the objects to be imaged resting on the x-y plane. Let the
viewer be distant on the negative z-axis. Replace equation (2.1) with
z =
f(z, y),
(2.2)wheref is our new description of the visible surface. Set up an image coordinate system scaled and rotated
such that object point (x, y, z) maps into image point (x, y), eliminating the need for distinct symbols for
image coordinates. This imaging geometry is illustrated in figure 2.1.
Using these coordinates, a viewer-facing surface normal vector at any point on the surface defined by William M. Silver 21
William M. Silver 22
(x
V
(x,y,z)
yV
Shape From Shading
Image Plane ,2y) Object Space z=f (x, y) x
z
Figure 2.1. Definition
of viewing
geometry. Objects rest on the x-y plane. the viewer is distant on the negative Z-axis, the image projection is orthograpnic. Visible surfaces are described cxplicitiyby z ==f(x, y).
Am
4.0
Shape From Shading
equation (2.2) may be given by its components:
[4fAX, Y) (, y)
Ox ' Oy '
If we make die following abbreviations:
Of(x,y) Of(x, y)
P Ox , q= ( ,
then die vector becomes:
[p, q, -1].
The quantity (p, q) is all that is needed to specify orientation, and is refered to as the gradient. The set
of all points (p, q) is called gradient space. We will often specify directions from the object in general by
giving the gradient of a surface element normal to that direction. For example, the placement of a point
source may be designated by a position in gradient space.
Since photometric sterco is based on the relation between irradiance and orientation (gradient), it is
not surprising that the gradient at each image point is the primary output produced. This representation
for shape is convenient in many situations [Horn 19791, [Smith 1979]. For example, as an object rotates
the surface normals undergo a much simpler transformation than does surface depth. There are situations
where depth is more convenient, and so it would be nice to be able to make use of the relationship noted
above to derive depth from gradient (of course, using gradient alone we can only get depth relative to
some reference point on the surface).
To do this we must first segment the image into regions corresponding to sections of smooth surface,
and then perform a numerical integration over each region. Thus comes into play the third component
of the 21-D sketch, contours of surface discontinuity. '[here are two kinds of surface discontinuities
to be concerned with: depth discontinuities, such as are caused by an occlusion contour, and gradient
discontinuitiCs, such as are caused by an edge of a polyhedron. If two regions are bounded by a gradient
23
Shape From Shading
discontinuity, they may be spliced together at that boundary. Unfortunatly, it is very difficult to identify
surface discontinuities in arbitrary scenes. In fact, under appropriate lighting and viewing conditions, such
a feature may not produce any measurable discontinuity in image irradiance.
The situation is complicated by the fact that a smooth surface may not give rise to arbitrary gradients,
rather they must satisfy the relation:
d
=Oq
(2.3)
ay
axThis is equivalent to saying that the integral of the gradient around any closed path entirely within a
smooth region is zero. This is related to the fact that in the numerical integration we may use either of the
following approximations:
ZZ+cx,y+dy = Zr,y
+
p,, dx + qx+dx,y dy zx+dx,y+dy = z, y + qy dy + Px,y+d dx.The complication is that these equations may not agree on a value for zxqar,,+dY, a situation which is
both a hindrance and a help.
On the one hand, measurement errors, noise, and other factors will make exact agreement between
equations (2.4) unlikely, even for perfectly smooth sections of surface. Therefore, the numerical
integra-tion algorithm must be able to deal with inconsistencies in the gradient measurements, in a way that
makes best use of the information present. On the other hand, these inconsistencies may be used to
identify surface discontinuities, even in those lighting and viewing conditions where they do not show up
as features in a raw image.
These issues have been dealt with in the experimental part of this work, with varying degrees of
suc-cess. A highly Cfective algorithm for integrating over smooth surfaces with minor gradient inconsistencies
has been found. Attempts to segment a scene into smooth regions using these inconsistencies were less
effective. Details of these algorithms and the results obtained are given in chapters 4 and 5.
24
Shape From Shading
2.2 Radiometry-Understanding Image Irradiance
The "brightness" or "grey-levels" recorded by an imaging device are measurements of image
ir-radiance, the radiant flux (power) impinging on a unit area of the receptive field. For a properly focused
optical system, the flux reaching a small element of the receptive field will be due exclusively to a cor-responding small surface element on the object. It can be shown that the flux received is proportional to
the flux emitted by a surface element of unit projected area, into a unit solid angle, in the direction of the
viewer. This quantity is called the scene radiance, although we will sometimes refer to it more informally as just brightness.
The flux received in a particular situation will depend on the nature and distribution of the incident illumination, the properties of the surface material, and the orientation of the surface element relative to the light sources and the viewer.
The nature of the incident illumination is of obvious importance. In general this includes spatial and spectral distribution, a0d( state of polarization, although in this work we are only concerned with spatial distribution. This may be given by specifying the flux reaching a surface element of unit projected area from a unit solid angle, as a frznction of direction from the surface element. 'This quantity is called the
incident radiance. We assume that the size of the objects of interest is small compared to their distance
from any source, so that each surface element receives the same illumination.
The microstructure of the surface material determines how a surface clement will reflect incident light. Here inicroslrucuire refers to any surface feature too small to be resolved by the imaging system in
use. We will not attempt to analyze surface microstructure, however, since all that is needed here is to
measure its macroscopic effects. [Nicodemus et al 1977] have proposed a precise nomenclature for specify-ing reflectance in terms of incident-beam and relected-beam geometry, as shown in Figure 2.2a. They introduce a fEnction called the Bidirectional R1flectance-Distribuzion Function (BR DF), which tells how
bright a surface element will appear when illuminated from a given direction and viewed from another
Shape From Shading
given direction. The BRDF is defined as the ratio of reflected radiance to incident irradiance, as a function
of the incident and exitant directions.
Most surfaces have the property that the reflectance is not changed by rotating a surface element
about an axis normal to die surface. We will refer to such surfaces as isotopic. This property allows a significant simplification in the specification of beam geometry, as shown in Figure 2.2b. As can be seen, only three angles are needed to determine reRectance. The incident angle (i) is the angle between an incident ray and the surface normal. The emergent angle (e), also called the view angle, is the angle between an emergent ray and the surface normal. The phase angle (g) is the angle between the incident and emergent rays. Surfaces must be isotropic when the reflectance map is used.
For any given uniform, isotropic surface material, any given distribution of distant light sources, and any fixed distant viewpoint, die brightness of a surface element will depend on its orientation only. This function is the long-promised refectance map, which may be used to relate the irradiance measured at a point in the image to the gradient of the surface element that gave rise to that measurement. This relation is called the image irradiance equation, and with suitable choice of units may be written thus:
I(x, y) = R(p, q). (2.5)
Here, I is image irradiance as a function of image coordinates (X, y), and I? is the reflectance map, scene
radiance as a function of surface gradient (p, q). Most of the shape-from-shading techniques that have been developed are based on equation (2.5).
It is important to appreciate the difference between the IIRDF, which indicates the behaviour of the surface material, and the reflectance map, which captures the entire imaging situation. In fact, the reflectance map can be derived from die BRDF and a specification of a particular light source distribution
and viewpoint [Hoqad Sjoberg 1979J.
The reflectance naptcan be determined experimentally, as shown in Chapter 4, it can be determined analytically from some surface model, or it can be purely phenomenological. Perhaps die most common
z
dci der dA **.*-.: a -. .. y ?r I Sourc e lop Normalb-Viewer
Figure 2.2. a) Beam geometry used in the definition
of
the Bidirectional Relectance-Distribution Function. Four antics are needed to specify reflectance-We polar angle 0, and aiith i of the incident beani, and the polar angle Or and a/iuith <, of the reflected beam. (Reprinted from[Horn and Sjoberg 1979). b) Beam geometry for isotropic surfaces. Only three angles are needed-the incident angle i. the emergent angle e, and the phase angle g. (Reprinted from [Woodham
1978]).
Shape From Shading
example of the latter is a lamberfian surface. The lambertian reflectance map is used in the next chapter
and, for those not familiar with it, developed in Appendix A. We summarize the important result here.
A lambertian surface is an ideal diffuse reflector, such that each surface element appears equally
bright from all viewing directions (this is very difTerent from saying that a surface element radiates equally
in all directions). The brightness of a surface element is proportional to the irradiance, which is in turn
proportional to the cosine of the incident angle. In Appendix A we show that:
For any lawbertian surface and any distant illumination !, there exists a single distant point source that produces the same reflectance map for that region of gradient space not self-shadowed with respect to any part oft
This somewhat surprising result says that, for appropriate surface gradients, a lambertian surface acts as
if any illumination were just a point source! Appendix A saows how to calculate the point source
equiv-alent to any given distribution, and how, under certain favorable circumstances, to eliminate the gradient
restriction.
2.3 Monocular Shape-from-Shading
If we have an image of a scene, and the reflectance map is known, it can be seen that equation (2.5)
provides us with one equation for surface gradient in two unknowns, p and q, at each point in the image.
Clearly, there is not enough in formation to determine orientation locally with a single image. What is not
clear is whether orientation can be detertmined by any means from a single image. Yet, several techniques
have been found that do just that, by employing global knowledge about surface smoothness or topology.
Horn's method is based on the fact that, for smooth surfices, if we know the gradient (p, q)
cor-responding to an image point (X, y), we may determine the change in gradient (dp, dq) due to a small
step in the image (dx, dy). There is not enough information, however, to allow the step to be taken in
an arbitrary direction-the direction chosen is fixed by the rellectance map. Thus a path is traced out in William M Silver 28
Shape From Shading
the image for which the gradient may be determined. The path is called a base characteristic. The precise
mathematical details behind this method are rather involved, but an excellent summary may be found in
[Woodham 1978, p188].
[Woodham 1978] presents a collection of methods for incorporating assumptions about surface
topol-ogy into a monocular shape-from-shading algorithm. For example, he shows that one can convert the
assumption that a surface is convex or concave into local constraints on surface gradient. We start by
as-signing to each surface element those gradients that are consistent with the image grey-levels, represented
by equal-brightness contours of the reflectance map in gradient space. Then, for each surface element, we
refine the set of possible gradients by examining neighboring elements and applying the surface topology
constraints, usually expressed as inequalities. Once an element's interpretation has been refined, it may
allow its neighbors' interpretations to be further refined also. Thus the constraints cause information to
propagate back and forth accross the image until a single global interpretation has been found.
The assumption that the surface is smooth is implicit in all of the methods of Horn and Woodham. It
is possible, however, to make explicit use of that assumption to provide the additional constraint necessary
to solve for surface shape [Strat 1979]. We may start with some initial assignment of gradients, and
repeatedly refine them so that they come "closer" to satisfying both the imaging equation and the surface
smoothness condition. Such a procedure is called an iterative relaxation scheme, and the hope is that it will eventUally converge on a correct solution.
2.4 Photometric Stereo
As can be seen in the previous section, solution of equation (2.5) from a single image requires global
propagation of constraints, a process which is time-consuming, requires additional assumptions, and is
prone to propagating errors as well. The alternative is to get more equations at each image point, so the
solution may be found locally.
29
Shape From Shading
If we record a second image of the scene, from the same viewpoint but with a different distribution
of incident illumination (i.e. one that is not just a multiple of the first distribution), a different reflectance
map will apply. This yields two independent equations in two unknowns at each image point:
h1(x, y) = RI(p, q) (2.6)
1
2(,y)
=R2(p,q).Here, the subscript on I identifies the image, and the subscript on R identifies the corresponding
reflectance map. Since the viewpoint hasn't changed, we may use the same image coordinates (x, y) for
both images and be sure that we are refering to the same object point (X, y, z), and hence the same surface
gradient (p, q). This simple correspondence between the two images is perhaps the most ftindamental
principal of photometric stereo.
With two equations in two unknowns at each image point, we are in a position to solve for surface
gradient locally. In general, equations (2.6) are nonlinear, so that they constrain the solution to a finite set
of possible orientations (typically two). We may use a simple global constraint to eliminate the remaining
ambiguity, but a better approach is to use a third image taken with a third independent light source
distribution to overdetermine the solution. In fact there are several other important reasons to use more
than two images in a given situation:
Redundancy: In practice, the irradiance measurements in any given image may be subject to effects
that produce errors when using equation (2.5). There are many such sources of error, including: sensor
inaccuracies, signal noise, errors in the reflectance map, failure of one of the assumptions required for
using the reflectance map, illumination of a surface element by light relected from another part of the
object (mutual illumination), and shadows cast by other parts of the object. It is very dificult to correct
the errors caused by these effects, but the use of an additional light source allows the affected pixels to be
detected and discarded. This is possible because of the redundant information supplied by the additional
source-crrors usually produce inconsistent measurements that could not arise from any possible surface
gradient.
30
Shape From Shading
Self-Shadows: The shadow produced when a surface element is tilted away from a light source is
called a self-shadow, and is a purely local effect. While it is clear what is meant by a self-shadow when
there is only a single point source, we must be careful when dealing with extended or multiple point
source illumination. Here we will consider a surface element to be self-shadowed unless it is oriented so that it can receive illumination from every element of an extended source. This is important because
equation (2.5) is only valid for those surface elements that can "see" all of the source implied by the
reflectance map R(p, q). Any light source distribution that is not a point source in the direction of the
viewer will produce self-shadows for some region of gradient space. No information is provided by such
a source about object points whose gradient is in that region. By proper positioning of multiple sources,
however, we can insure that any surface element is adequately illuminated. For example, [Woodham 1978,
p.107] gives a four-point-source configuration that provides at least two sources everywhere in gradient
space, and at least three sources for most gradients.
Non-Uniform Swface Material: We will see in the next chapter how the uniform surface assumption
may be relaxed by using parameters at each object point which attempt to model surface non-uniformities.
Additional light sources are used to permit gathering the information necessary to determine both these
parameters and the gradient.
The type of source to use is as important as the number. Point sources are the casiest to analyze and
to make, and have been studied extensively. Point sources are useless, however, on highly specular
sur-faces such are often encountered in industry. Recently, [Ikeuchi and Horn 1979] showed how to design an
extended source with a distribution well-suited for specular surfaces. Still, it is difficult to construct such a
source, and it is dirficult to illuminate surface elements with steep gradients. It is expected, therefore, that
point sources would be used when possible. Of course in many applications, such as planetary explorers,
we are not free to choose the illumination at all.
When using point or localized sources, it is important to consider the placement of those sources.
There are two often conflicting requirements: the sources must provide independent information, and
31
Shape From Shading
they should illuminate surface elements having a wide range of gradients. The former requirement
sug-gests putting sources in orthogonal directions from the object. The latter sugsug-gests putting sources near the
viewer.
The independence of a collection of sources may be difficult to determine, since it depends on the surface material. For a lambertian surface, point sources are independent if they do not lie in a plane containing the object. For specular surfaces, point sources are independent (although not useful) if they lie in different directions from the object, even if those directions are coplanar. For typical surfaces that con-tain both matte and specular components, the question of source independence has not been adequately
studied.
In order to use photometric stereo, we must be able to determine the reflectance maps needed, and solve the appropriate set of equations at each image point. In the experimental part of this work we dive details of particular methods that were found to be effective. Here, we make some general observations.
We may calculate the reflectance maps from assumed surlace properties and the light source distribu-tion, as was done in [Ikeuchi and Horn 1979]. In practice, however, it is usually better to measure the reflectance maps. This may be done by mounting a sample on a device capable of holding it at any desired orientation with respect to the viewer (a goniometer), or from images of an object of known shape. If the reflectance maps are measured using the same illumination, sensor, and setup geometry as will be used with the unknown objects, they will include a complete source and sensor calibration as well, and will be in units we will refer to as machine numbers.
If the reflectance maps are known analytically, it might be possible to solve the set of equations at
each image point algebraically (see Section 3.2). Usually this is not feasable, and of course if we have determined the reflectance maps by measurement it will be impossible. In these cases, die equations may
be solved by table-lookup or search. It is the ability to find die orientation at each point by table-lookup
that is responsible for the speed claimed For photometric stereo in the Introduction. William M. Silver 32
Shape From Shading
A table can be constructed with gradients as entries, indexed by irradiance measurements. In
practice, there are many details that must be worked out that can affect the performance of the algorithm.
These issues are covered in Chapters 4 and 5.
2.5 Photometric Stereo vs. Binocular Stereo
By now it should be apparent that shading can be a very useful depth cue for machine vision systems.
It is clear that shading is an important depth cue in human vision as well-consider, for example, people's
ability to perceive the shape of smooth objects appearing in photographs. Even so, shading is often not
as-sociated with depth perception-people will usually first think of stereo, which makes use of images taken from different viewpoints. Here we will call this process binocular stereo, when we need to distinguish it
from the photomccric stereo technique that is based on shading.
Binocular stereo is based on imaging geometry rather than photometry. If an object feature can be
located in both images, the depth of that feature can be determined by triangulation. This matching of
features in the two images is in fact the major computational task (and the major difficulty) of a binocular
stereo system.
Binocular stereo is, of course, an important part of human depth perception. In addition, it is a
method of considerable practical value, since it is used to generate topographic maps and digital terrain
models from aerial photographs [ASP 19781. For these reasons, considerable effort in the machine vision
community has been devoted both to Understanding human stereo vision and to building competent
automated systems based on that understanding [Marr and Poggio 1979j, [Grimson 1980J.
'[he photometric and binocular stereo methods are in many ways complementary approaches. That
and the considerable interest in both techniques warrants some space here for a comparison. The methods
are complementary in the following ways:
. Photometric techniques work best on smooth objects with few surface discontinuities. Stereo
33
Shape From Shading
works best on rough surfaces with many discontinuities.
* Photometric techniques are best with objects having uniform surface cover. Stereo is best with
varying surface cover, for example different paints or textures.
* Photometric techniques allow accurate determination of surface gradient. Stereo is best if
accurate distances are to be found.
Binocular stereo has sonic clear advantages over photometric techniques:
* Stereo is a purely passive sensing technique. 'There is no need to control or even know the
illumination, and practically any illumination will do.
* Stereo requires no calibration or prior knowledge of surface relectance properties.
Likewise, photometric stereo has some clear advantages over binocular stereo:
* Photometric stereo involves an extremely simple computation; binocular stereo is computation-ally complex. Photometric stereo will run faster on similar hardware. Put another way, it will be cheaper to implement similar performance.
* In certain circumstances, photometric stereo can provide iinformation about surface cover as well as shape (see chapter 3). Binocular stereo has no such ability.
CHAPTER 3
NON-UNIFORM SURFACE MATERIAL
If a scene contains objects with non-uniform surface material, we cannot use equation (2.5) because the
reflectance map will vary accross the surface. Of all the assumptions required for using equation (2.5), the uniform surface assumption is the most restrictive, since scenes of practical interest will often not satisfy it. In this chapter we seek ways to relax the uniform surface material assumption. As a bonus, we find that in addition to determining surface gradient, we can learn something about the surface material as well.
All of the methods for dealing with non-uniform surfaces that have been investigated may be
sum-marized as follows:
1) Modify equation (2.5) by adding one or more parameters that are Functions of image
coor-dinates (x, y). These parameters will attempt to model surface non-uniformitiCs.
2) Using the new imaging equation from step 1, determine how multiple images of a scene may be used to eliminate the surface material parameters, leaving equations with gradient as the only
unknown. We will require one additional light source For each parameter.
3) The equations resulting from step 2 may be solved at each image point by table-lookup
Non-Uniform Surface Material
niques. In simple cases, the situation is equivalent to having equation (2.5), allowing the use of
any of the techniques presented in the previous chapter (monocular or multi-image).
4) Once surface gradient has been Found at each image point, it may be plugged back into the
original equation (step 1) to solve for the surface material parameters.
We will present two models of non-unifomi surfaces in this chapter. The first adds one parameter to
equation (2.5), a multiplicative reflectance factor. The second uses two parameters, coefficients of a linear
combination of two reflectance maps. This second one is an attempt to model surfaces which have both
a specular and a matte component of reflection, in varying proportions. It is believed that such a model
applies to many real surfaces [Horn 1977], although much more research into reflectivity functions found in practice is needed.
There are siruations where we are viewing a scene with unknown refectance properties, and no
convenient way to measure them. A good example is a rock being viewed by an unmanned explorer that
has landed on another planet. We would like to be able to estimate the reflectance function, so that the
shape can be determined roughly. In the final section of this chapter, we introduce a method that shows
promise for dealing with these situations.
3.1 The Multiplicative Reflectance Factor
Perhaps the simplest model of non-uniform surface material may be obtained by multiplying a given
reflectance map by a reflectance factor, often called the albedo, which varies over the surl'ace of the object.
In this case, we replace equation (2.5) with:
I(x, y) = p(z, y)R(p, q), (3.1)
where p is the albedo, an unknown function of image coordinates (x, y).