difficulté de la tâche sur le contrôle de la posture et les mécanismes d'inhibition intra-corticaux
Option Enseignement
Conseiller: Prof. Dr. Wolfgang TAUBE Co-conseiller-ère: Audrey MOUTHON
Table des matières
Remerciements ... 3
Résumé ... 4
1 Introduction ... 5
1.1 Contexte et situation initiale ...5
1.2 Le mouvement ...7
1.2.1 Les mouvements conscients ...7
1.2.2 Les mouvements inconscients ...9
1.3 Les différents systèmes du contrôle postural ...9
1.3.1 Le système musculo-squelettique ...10
1.3.2 Le système des forces externes ...12
1.3.3 Le système nerveux ...12
1.4 La stimulation magnétique transcrânienne ...13
1.5 Le contrôle de l’équilibre et la hauteur ...15
1.6 Buts et questions de recherche ...17
2 Méthode ... 19
2.1 Echantillon ...19
2.2 Design de recherche ...19
2.3 Procédure des tests ...19
2.3.1 Conditions d’expériences ...19
2.3.2 Plateforme de force ...20
2.3.3 Enregistrement EMG ...21
2.3.4 Questionnaires ...21
2.3.5 Acquisition des données TMS ...22
2.4 Outils utilisés ...23
2.5 Analyse des données ...23
2.5.1 Analyses statistiques ...24
3 Résultats ... 25
3.1 COP ...25
3.3 TMS ...30
4 Discussion et conclusions ... 33
4.1 Équilibre et effets psychologiques ...33
4.2 Excitabilité cortico-spinale et inhibition ...34
4.2.1 Les effets de la modification de la hauteur ...34
4.2.2 Les effets de la modification de la stabilité ...35
4.3 Limite de l’étude ...37
4.4 Conclusions ...37
Bibliographie ... 38
Déclaration personnelle ... 45
Droits d’auteur ... 45
Table des annexes ... 46
Annexe A : Consentement écrit de la participation à l’étude ... 47
Annexe B : Questionnaire court ... 48
Annexe C : Questionnaire long ... 49
Remerciements
Je tiens à remercier particulièrement et très chaleureusement mon conseiller, le Docteur Wolfgang Taube ainsi que ma co-conseillère, Madame Audrey Mouthon, pour le suivi régulier et le soutien qu'ils m'ont apporté tout au long de l'élaboration de ce travail. Pour leur présence et leur disponibilité à répondre à mes questions selon mes besoins.
Cette étude a été réalisée et concrétisée grâce à de nombreuses personnes qui m'ont aidée pour les tests et la récolte de données, je remercie vivement Martin Keller, Gonzalo Marquez et Craig Tokuno qui ont complété l'équipe.
NSERC et SNSF sont les investigateurs de cette étude, ils ont permis la réalisation des tests grâce à son financement. L’Université de Fribourg a mis à disposition les locaux et le matériel technique nécessaire.
Je remercie également toutes les personnes qui se sont soumises à cette étude dont la générosité et la disponibilité a contribué à sa réalisation dans les meilleures conditions.
Résumé
But : Cette étude avait pour but d’analyser les déplacements du centre de pression (COP), ainsi que les effets de l’augmentation de l’instabilité et l’augmentation de la perception de la hauteur sur l’excitabilité cortico-spinale et les inhibitions intra-corticales (SICIs). Les études actuelles confirment l’application du cortex moteur primaire dans le contrôle de la posture, cependant, les facteurs d’excitabilité de celui-ci et l’influence des SICIs sont encore peu clairs.
Méthode : Les sujets (n = 16) étaient debout sur une plateforme de force à 0.20m ou à 3.20m du sol pour modifier la perception de la hauteur. Trois conditions différentes (supporté, libre ou sur un dispositif instable) ont été testées à chaque hauteur. La TMS a ciblé le muscle Soleus (SOL) et le muscle Tibialis anterior (TA). Les potentiels moteurs évoqués (MEPs) ainsi que les SICIs induits par la TMS, ont été enregistrés pour les différentes conditions expérimentales.
Résultats : Plus la difficulté de la tâche et la perception de la hauteur ont été augmentées et plus les données du COP (distance, surface et temps de déplacement parcourue moyen) ainsi que les amplitudes SICIs ont augmentées (exception pour une amplitude SICI dans le SOL en condition instable). Les amplitudes MEPs ont augmenté avec la difficulté de la tâche mais ont diminuées à l’inverse avec la perception de la hauteur (exception dans le TA en condition instable).
Conclusion : Les résultats démontrent que le contrôle de la posture se fait différemment selon la tâche à effectuer ou l’état physiologique des sujets. L’augmentation de la difficulté de la tâche traduit une facilitation de l’excitabilité cortico-spinale alors que l’augmentation de la hauteur a l’effet inverse. Les mécanismes d’inhibition sont également impliqués dans le contrôle de l’équilibre en situation de stress (on observe une diminution de la SICI) mais les conséquences sur l’excitabilité cortico-spinale ne sont pas déterminées. De futurs études sont nécessaires pour confirmer l’influence des SICIs sur les facteurs d’excitabilité du cortex moteur primaire dans le contrôle de l’équilibre.
1 Introduction
1.1 Contexte et situation initiale
L’équilibre est l’état d’un individu qui maitrise sa position et ses forces ce qui correspond à maintenir la projection du centre de gravité dans le polygone de sustentation. L’équilibre est indissociable de la posture. La fonction d’équilibration doit permettre soit le maintien de la posture en situation statique malgré des forces contraires, soit l’adaptation permanente des appuis afin d’assurer la poursuite du mouvement en situation dynamique.
L’être humain est capable d’adopter une infinité de postures correspondantes chacune à un état d’équilibre du corps (Bouisset, 1991). La station verticale présente un intérêt particulier car elle correspond à l’attitude fondamentale de l’espèce humaine. Selon Massion (1994), la réalisation de tous les actes quotidiens nécessite en premier lieu de disposer d'une posture stable.
L’équilibre de l’homme ne diffère pas des règles fondamentales de la physique. L’équilibre statique est maintenu lorsque la somme des forces et des moments de forces agissant sur le corps est nulle (Bazergui et al. 2002). D’une part, la force gravitationnelle attire la masse vers le centre de la terre. D’autre part, les forces de réactions soutiennent le corps. Elles sont réparties entre les zones de contacts de l’homme et de l’environnement et peuvent être représentées par une force résultante dont le point d’application est le centre de pression (COP, de l’anglais Center of pressure) (Bemard-Demanze et al. 2004). Dans la réalité, cette situation d’équilibre statique est très rare voire inexistante puisque le corps est en permanence soumis à des perturbations.
L’apparition de plates-formes de force a permis de quantifier plus précisément les oscillations posturales de la station debout immobile : chez le sujet sain, la surface que balaie le COP est extrêmement réduite, proche de 1 cm2 (Gagey et Weber, 2004). Sasaki et al. (2002) ont testé plusieurs conditions pour évaluer les caractéristiques des oscillations posturales comme par exemple une situation avec les yeux ouverts, les yeux fermés ou lors d’une stimulation optocinétique. Le stimulateur optocinétique est un appareil qui projette une scène visuelle en mouvement dans une cabine à un patient généralement debout. Il déclenche un nystagmus dans le sens choisi par le thérapeute, entrainant aussi une déviation posturale.
Contrairement à ce qu’on peut imaginer, son but n'est pas de "déstabiliser le plus possible" le malade, mais de provoquer un conflit neurosensoriel thérapeutique.
Les plates-formes de forces verticales, munies de trois ou quatre jauges de contraintes permettent la transformation des informations du COP en un signal électrique (Figure 1). Différents paramètres sont recueillis :
-La surface décrite par les déplacements du COP des pieds, reflet de la précision du système postural ;
-La longueur parcourue lors de ces déplacements ;
-Les oscillations dans le plan sagittal et dans le plan frontal ; -Le rapport longueur/surface.
L’obtention de valeurs faibles pour les deux premiers paramètres est un indicateur de bonne stabilité du sujet. La longueur parcoure représente la dépense d'énergie mise en jeu par le sujet pour réguler son équilibre et le rapport longueur/surface, la précision du contrôle postural (Perrin et al., 1993 ; Gagey et Toupet, 1991).
Fig. 1 : Résultat d’une analyse de la posture statique pendant 40 secondes chez un sujet sain avec les yeux ouverts sur une plateforme de force. Issu d’une expérience de Dupui (2014) sur les techniques d’analyse
Les études se penchent souvent sur les problèmes d’équilibre liés à une pathologie comme la maladie de Parkinson (Bazalgette et all. 1987), de la vieillesse et les risques de chutes (Bloem et all. 2003) mais rarement chez des sujets sains. Nous avons donc essayé d’analyser des situations encore inexplorées par les chercheurs. Pour mieux comprendre le déroulement de l’étude, nous allons introduire les mécanismes principaux qui sont impliqués lors d’un mouvement et plus précisément lors du contrôle postural chez l’homme.
1.2 Le mouvement
La capacité d’effectuer un mouvement, comme de bouger le petit doigt ou de mobiliser le corps entier est une chose relativement facile pour la majorité des personnes. Cependant en terme de physiologie, c’est très complexe. Buisset (2002) sépare les mouvements en deux catégories : les mouvements réflexes ou inconscients et les mouvements conscients.
1.2.1 Les mouvements conscients
Les mouvements conscients et volontaires relèvent des structures supérieures (tronc cérébral, cervelet, noyaux gris centraux et cortex). Ils sont déclenchés après une représentation mentale de l'action à effectuer (le but à atteindre) dans le cortex moteur. Le modèle général de contrôle moteur volontaire est appuyé par plusieurs observations illustrées par la figure 2.
Les commandes de mouvements volontaires prennent naissance dans les aires d’association corticales. Les mouvements sont planifiés dans le cortex moteur ainsi que dans les noyaux gris centraux. Les fibres nerveuses en provenance des neurones de l’aire motrice primaire filent vers les noyaux moteurs des nerfs crâniens, puis vers la moelle en suivant le faisceau pyramidal. Le faisceau pyramidal transmet de cette manière les ordres pour les mouvements conscients. Le mouvement est déclenché et les feedbacks sensitifs des muscles, des tendons, des articulations et de la peau reviennent directement au cortex moteur pour ajuster et affiner les mouvements.
1.2.1.1 Le cortex moteur
Des études récentes suggèrent que le cortex moteur est impliqué dans le contrôle de la posture lors de la position debout (Beloozerova et al., 2003 ; Jacobs et Horak, 2007 ; Taube et al., 2006, 2008). Le cortex pré-moteur interviendrait dans la régulation de la posture, en dictant au cortex moteur une position optimale pour un mouvement donné. L’aire motrice supplémentaire, quant à elle, semble influencer la planification et l’initiation des mouvements en fonction des expériences passées. Le simple fait d’anticiper un mouvement déclenche une transmission nerveuse dans la zone supplémentaire.
Les aires corticales primaires recueillent l’ensemble des neurones qui commande la motricité volontaire et où chaque partie du corps correspond à une région précise. Penfield et Rasmussen (1950) représentent sur cette portion du cortex leur célèbre Homonculus moteur (figure 3). Ils illustrent les différentes régions du corps concernées en prenant en considération celle qui possèdent une motricité fine en les surreprésentant. On distingue que les membres inférieurs (les muscles du mollet et de la cheville) se trouvent à l’aplomb du sillon inter-hémisphérique. C’est principalement cette partie qui nous intéresse pour cette étude.
L’organisation fonctionnelle de M1 à récemment fait l’objet d’une revue importante (Schieber, 2001). Trois aspects fondamentaux sont ressortis dans le contrôle de la musculature lors de la planification et la réalisation d’un mouvement :
− La convergence cortico-spinale (un même muscle est représenté à plusieurs endroits dans M1) ;
− La divergence cortico-spinale (un endroit dans M1 contrôle plusieurs muscles) ; − Les connexions horizontales (connexion de muscles synergistes agissant sur plusieurs
articulations).
Les muscles ne sont donc pas toujours contractés de la même façon selon le mouvement à exécuter.
1.2.2 Les mouvements inconscients
Les mouvements inconscients ou réflexes relèvent de la moelle épinière et du tronc cérébral. Ils sont provoqués à la suite d'une stimulation sensorielle indépendante de la volonté. Ils surviennent d’une part très rapidement dans des situations ou une réflexion consciente prendrait trop de temps. Les réflexes ont souvent pour but de rétablir l’équilibre du corps et sont principalement des réactions de défense.
1.3 Les différents systèmes du contrôle postural
Concernant le contrôle postural, il n’est pas évident de distinguer ce qui est simplement un ajustement postural (réflexe postural) ou un mouvement volontaire. On comprend bien que le contrôle postural de l’homme est très complexe et consiste en de multiples systèmes sensoriels pour répondre essentiellement à deux fonctions (Horak, 2006). La fonction d’orientation, qui permet au corps de s’orienter dans l’espace et de planifier une action par rapport à son environnement, et la fonction d’équilibration qui permet au corps de maintenir son équilibre. Grâce aux différentes conditions expérimentales, nous allons perturber les différents systèmes pour observer comment les sujets réagissent et contrôlent leur posture. Pour étudier ce phénomène plus en détail, il est nécessaire de rappeler les bases neurophysiologiques et présenter rapidement les différents systèmes importants dans la régulation de l’équilibre.
Que ce soit de manière consciente ou non, il y a toujours trois systèmes qui sont principalement concernés lorsqu’on parle de posture (figure 4). Le système nerveux, le système musculo-squelettique et le système des forces externes (monde extérieur). En cas de déséquilibre, les systèmes sensoriels agissent comme des signaux détecteurs d’erreur qui vont transmettre le message aux effecteurs moteurs pour développer la meilleure stratégie possible.
1.3.1 Le système musculo-squelettique
Le système musculo-squelettique constitue une chaîne de segments articulés et de muscles composés des extenseurs, des fléchisseurs, des abducteurs et des adducteurs. Son rôle est en premier lieu de lutter contre l’action de la pesanteur. A cette fonction s’ajoute celle d’assurer l’interaction entre le corps et l’environnement (Massion et al., 2004). Le degré de liberté des articulations, la forme des segments et la fonction des muscles conditionnent les mouvements possibles. L’homme peut adopter une multitude de postures sur une jambe ou deux jambes, etc., mais nous nous pencherons ici particulièrement sur la posture debout sur deux jambes. Cette posture debout est possible grâce à l’excitation stationnaire d’un certain nombre de muscles qui se contractent (figure 5). La position élevée du centre de gravité ainsi que la faible surface d’appui des pieds font que l’homme n’est jamais totalement stable. Il oscille en permanence pour réguler les déséquilibres.
Système nerveux Buts à atteindre Équipement sensoriel Coût énergétique Système musculo-squelettique Acte moteur Monde extérieur Modèle écologiste Modèle cognitiviste
(Forces internes) (Pesanteur)
(Forces externes)
Fig. 4 :Schématisation de l’interaction des systèmes actifs pour la réalisation de l’acte moteur inspiré de Massion (1997). Les flèches indiquent les interactions entre les différents partenaires
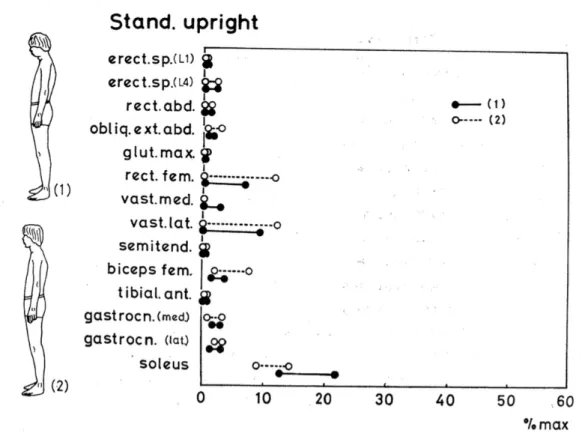
On observe qu’en position debout, les principaux muscles activés sont les extenseurs de la cheville (en particulier le Soleus), les extenseurs de la colonne vertébrale et les muscles de la nuque. Ces muscles s’opposent à l’affaissement du corps vers l’avant. A noter que ce ne sont pas les seuls muscles mis en jeu et qu’il existe des variations individuelles. Malgré cela, l’activité électromyographique est faible dans les principaux muscles concernés. La force musculaire est par exemple de 12% à 22% pour le Soleus (SOL) qui est un des muscles les plus actif (Bouisset & Maton, 1999). La position de l’homme en position debout est donc économique.
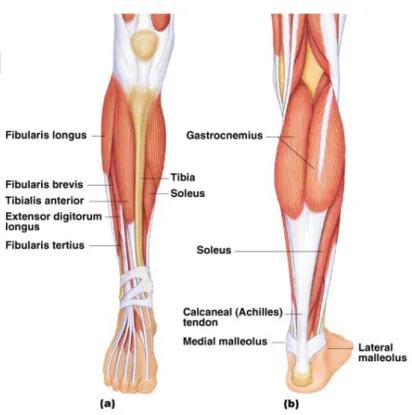
Dans cette étude, nous allons mesurer l’activité musculaire du SOL (figure 6b), située en arrière de la jambe et celle du Tibialis anterior (TA), muscle de la loge antérieure de la jambe qui va du bord externe du tibia au bord interne du pied (figure 6a).
Fig. 5 : Illustration de l’activité électromyographique de la posture debout naturelle (1) et au garde à vous (2) d’après Okada (1972). Les valeurs sont exprimées en pourcentage moyen entre le minimum et le maximum de
1.3.2 Le système des forces externes
En dehors de la pesanteur, des forces perturbatrices (monde extérieur) d’origines différentes peuvent être administrées au corps et perturber son équilibre. Il y a deux sources de perturbation ; endogène ou exogène. Les perturbations endogènes interviennent lors de l’exécution d’un mouvement (intérieur) alors que les perturbations exogènes sont déclenchées par la modification de l’appui postural, de l’environnement visuel ou de la modification du système vestibulaire. Dans cette étude, nous testons les effets des forces externes grâce notamment à une plateforme instable et l’augmentation de la hauteur.
1.3.3 Le système nerveux
Le système nerveux est divisé en système nerveux central (SNC) et système nerveux périphérique (SNP). Le SNC est composé de l’encéphale comprenant le cerveau, le tronc cérébral, et le cervelet (situés dans la boîte crânienne), et de la moelle épinière (située dans le canal rachidien). Son rôle est d’organiser les activités sensori-motrices grâce à trois récepteurs. Les récepteurs proprioceptifs (musculaires, musculo-articulaires et cutanés), les récepteurs vestibulaires (otolithes et canaux semi-circulaires) et les récepteurs visuels (rétine).
Le SNP lui contient tous les autres nerfs ou cellules nerveuses qui ne font pas partie du cerveau et de la moelle spinale.
L’élément de base de toute transmission et traitement de l’information dans le système nerveux est le neurone. Il a la capacité de transformer et transmettre les informations sous la forme de signaux électriques. Lorsqu’un neurone est activé et que la dépolarisation atteint un certain niveau de tension alors il se produit un potentiel d’action. Les informations ne sont pas uniquement transmises à l’intérieur d’un seul neurone mais un transfert vers d’autres cellules doit également avoir lieu. C’est ce qui se passe au niveau des synapses. Quand l’influx parvient au synapse, il se produit une libération de neurotransmetteurs. Deux effets différents peuvent apparaître : une excitation ou une inhibition. Les neurotransmetteurs sont essentiels à la commande de nos sensations et de nos comportements et sont donc très importants.
Normalement, il existe un équilibre entre les différents neurotransmetteurs ce qui permet au corps d’assurer la production d’oscillations permanentes pour réguler sa posture. Le neurotransmetteur excitateur, qui est utilisé pour la transmission de l’influx nerveux des neurones efférents vers les muscles, est l’acétylcholine. Il existe cependant de nombreux autres neurotransmetteurs excitateurs, qui ont chacun une fonction précise. Le neurotransmetteur acide gamma-aminobutyrique (GABA) est lui un inhibiteur car il hyper-polarise les cellules post-synaptiques. Sans lui, les oscillations deviendraient instables ou disparaitraient (Baker et al., 1999). Les interneurones GABAergiques inhibent les neurones cortico-spinaux et jouent de ce fait un rôle important dans le déroulement de la commande motrice (Di Lazzaro et al., 1998 ; Floeter et Rothwell, 1999).
1.4 La stimulation magnétique transcrânienne
L'opportunité de pouvoir stimuler le cortex humain de manière efficace et non-invasive a permis un avancement important des connaissances en neuroscience. Plus précisément, grâce à l’introduction de la stimulation magnétique transcrânienne (TMS, de l’anglais Transcranial Magnetic Stimulation). Le TMS active les cellules nerveuses du cerveau et induit un potentiel d’action dans le muscle et nous permet d’étudier le système cortico-spinale. Cette méthode renseigne notamment sur l'état fonctionnel de la voie cortico-spinale et du système nerveux central permettant de mettre en évidence l’état d’excitabilité du cortex, le fonctionnement des réseaux inhibiteurs et facilitateurs intra-corticaux (Cantello et al., 2002 ; Hallet, 2000 ; Kujirai et al., 1993 ; Rothwell, 1998).
Actuellement très peu d’études sont réalisées sur le fonctionnement de l’équilibre chez l’être humain au niveau du système nerveux. Aucune n’a été réalisée avec les changements d’inhibition intra-corticale et des variations de condition à basse et haute hauteur ainsi que lors de changements de la stabilité. C’est pourquoi, nous utilisons le TMS pour clarifier les mécanismes qui entre en jeu dans le contrôle de l’équilibre dans différentes conditions expérimentales. La méthode exacte que nous avons utilisée sera décrite plus loin dans l’étude mais énonçons ici les principes de base :
Lorsque le cône de stimulation est placé correctement au dessus de la région M1 du cortex et que l’intensité des stimulations est suffisamment grande, les neurones de la voie cortico-spinales sont activés. Il en résulte une réponse dans le muscle ciblé qu’on nomme également potentiel moteur évoqué (MEP, de l’anglais Motor Evoked Potential). Les MEPs peuvent être recueillis à l’aide d’électrodes d’enregistrement électromyographique (EMG) de surface. L’amplitude des MEPs obtenue après une TMS nous renseigne sur l’excitabilité de la voie cortico-spinale (Devanne et al., 1997). Comme nous l’avons noté dans les chapitres précédents, nous allons stimuler la région M1 du cortex rattaché à la jambe et recueillir la réponse dans le SOL et le TA. Une augmentation de l’amplitude des MEPs traduit une facilitation de l’excitabilité cortico-spinale, alors qu’une réduction d’amplitude reflète la diminution de cette excitabilité.
Kujirai et al. (1993) ont comparé l’amplitude d’une réponse musculaire obtenue par une simple TMS (MEPsimple) avec la réponse obtenue d’une double TMS (MEPdouble). Ils ont
constaté que si l’intervalle entre les stimulations est de 1 à 5 ms, l’amplitude du MEPdouble est
diminué par rapport à l’amplitude du MEPsimple. Cette réduction est due à une inhibition de
type GABAA (Ziemann et al., 1996). Aujourd’hui, les doubles TMS sont utilisées pour
mesurer les changements d’inhibitions intra-corticales entre différentes tâches motrices. Si lors d’une tâche donnée, l’activité d’un neurone est plus grande, alors à intensité de TMS égale, on s’attend à recruter une plus grande quantité de neurones cortico-spinaux (donc d’obtenir un MEP de plus grande amplitude).
Il y a plus d’études à ce sujet réalisées dans les muscles distaux et proximaux supérieurs que dans les muscles inférieurs car la SICI y est plus facilement mesurable (Abbruzzese et al., 1999).
1.5 Le contrôle de l’équilibre et la hauteur
Comme cité précédemment, on s’intéresse aux variations du contrôle de l’équilibre provoquées par la réduction de l’instabilité ainsi que celles provoquées par l’augmentation de la hauteur. Ces changements de conditions augmentent le niveau d’anxiété, la peur du vide et la peur de tomber (Horslen et al., 2014 ; Lepicard et al., 2000).
La haute hauteur est donc une menace pour la posture ce qui en modifie le contrôle (Adkin et al., 2000, 2002 ; Davis et al., 2009 ; Carpenter et al., 1999). Selon Adkin et al. (2000), l’amplitude de déplacement du COP diminue et la fréquence de celle-ci augmente de façon linéaire avec l’augmentation de la menace. L’amplitude des déplacements du COP varie également selon l’ordre des tâches présentées (bas VS haut ou haut VS bas). Selon Davis et al. (2009), le COP varie aussi selon la peur des participants. Les sujets qui n’ont pas peur démontrent une diminution de l’amplitude des déplacements du COP avec l’augmentation de la hauteur alors qu’au contraire, ceux qui ont peur démontrent une augmentation de celle-ci avec l’augmentation de la hauteur.
L’augmentation de l’anxiété est également associée à un contrôle de la posture plus conscient (Brown et al., 2002 ; Gage et al., 2003 ; Huffman et al., 2009). Cette observation est confirmée par le fait qu’une seconde tâche cognitive donnée pendant la station debout altère d’avantage le contrôle de la posture, en particulier quand les sujets ont peur de tomber (Maki & Mcllroy, 1996). Les mécanismes neuronaux exacts qui provoquent ces changements sont encore peu connus car très peu de recherches ont été effectuées sur le sujet. Dans cette étude, nous allons utiliser la modification de la stabilité et l’augmentation de la hauteur comme facteur externe pour observer si les mouvements posturaux sont provoqués consciemment ou non.
Des études montrent une diminution de l’inhibition cortico-spinale lors d’une contraction volontaire dans le muscle mesuré (Ridding et al., 1995 ; Soto et al., 2006). Soto et al. (2006), n’observent pas de différence d’inhibition entre le fait d’effectuer une tâche volontaire ou la station debout (contrôle de la posture) mais ils observent des changements en passant de la station debout à la station assise.
Il est bien établi que la peur lors de la station debout à haute hauteur augmente l’excitabilité cortico-spinale dans les muscles de la main ainsi que dans les muscles du tronc (Tanaka et al., 2013). C’est toutefois l’activation des muscles de la jambe qui est essentielle pour le contrôle de la posture debout. Plusieurs études indiquent que l’excitabilité des voies moteurs des muscles de la jambe subissent des augmentations significatives en position debout par rapport à la position assise au repos (Goulart et al., 2000 ; Nielsen et al., 1993).
Cela suggère, comme pour les contractions volontaires, que la contraction des muscles de la jambe lors de la posture debout est associée à une augmentation de l’excitabilité marquée de la population des motoneurones spinaux (Schneider et al., 2004).
La méthode qui mesure le réflexe d’Hoffman (H-réflexe) permet de déterminer l’excitabilité spinale. Elle mesure la réponse réflexe, médiée par les fibres nerveuses Ia afférentes proprioceptives qui proviennent des fuseaux neuromusculaires. Plusieurs études ont investigué l’effet de l’anxiété sur le H-réflexe. Sibley et al. (2007) ont observé une diminution de l’amplitude H-réflexe lors de l’augmentation de la hauteur. Carpenter et al. (2004) émettent l’hypothèse qu’il y a un changement dans le mécanisme réflexe spinale sous condition de peur. Une diminution du H-réflexe traduit une diminution de l’excitabilité spinale. Cette méthode n’a pas été utilisée dans notre étude mais il est important pour nous de pouvoir comparer les effets de l’excitabilité spinale obtenus dans les autres études avec ceux de l’excitabilité cortico-spinale.
1.6 Buts et questions de recherche
Par conséquent, le but de cette étude est d’examiner les comportements posturaux ainsi que les mécanismes neuronaux impliqués dans le contrôle de l’équilibre dans diverses conditions expérimentales. L’analyse des comportements posturaux de la station debout de personnes en bonne santé est analysée grâce aux données du COP. La TMS permet l’évaluation des mécanismes neuronaux impliqués dans le contrôle de l’équilibre. Les MEPs ainsi que les SICIs qui en résultent mesurent l’excitabilité et/ou l’inhibition de M1. Ils sont enregistrés pour les muscles du SOL et du TA.
Différentes conditions sont mises en place pour induire un sentiment d’instabilité et de changement de perception de la hauteur. Pour vérifier l’état émotionnel des sujets provoqué par la perception de la hauteur, nous utilisons un questionnaire après chaque condition à haute hauteur. Un second questionnaire plus complet vient compléter les analyses à la fin des trois conditions à haute hauteur.
Nous nous attendons à obtenir des valeurs moyennes du COP des trois paramètres mesurés (la distance parcourue, la surface parcourue et le temps de déplacement) plus petites en situation de basse hauteur qu’à haute hauteur et également plus petites dans la position debout supportée que debout libre ou que debout sur un objet instable. Nous émettons également l’hypothèse que les résultats du COP seront liés à l’état émotionnel des sujets et augmenteront donc linéairement en fonction de la peur et de l’anxiété ressentis à haute hauteur.
Finalement, en se basant sur les travaux cités auparavant, nous nous attendons à une augmentation de l’amplitude MEP et une réduction de l’inhibition intra-corticale lorsque la difficulté de la tâche augmente (stable VS instable) et lorsque la hauteur augmente (bas VS haut).
Le but final est de déterminer si l’augmentation des oscillations posturales induites par l’augmentation de la perception de la hauteur et/ou l’augmentation de l’instabilité est due à un changement au niveau des mécanismes de l’inhibition intracortico-spinale. Nous avons fait le choix de travailler sur une population jeune et saine, afin d’écarter les facteurs intrinsèques liés à l’âge pouvant favoriser l’apparition d’un déséquilibre et d’une chute, et nous focaliser sur la chaîne de traitements impliqués dans le maintien de l’équilibre statique.
Etude de l'équilibre
Général In situ
Non perturbé Perturbé
Maladie /
Handicap Personnes en bonne santé
Vieux Jeune Assis Debout Dynamique Statique Avant Pendant Couplage EMG Après
Voici donc les buts et la question de recherche de l’étude :
• But principal : Le but du projet est de comparer l’équilibre des sujets dans diverses conditions (supportée, libre, instable) à basse hauteur (0.80m) et à haute hauteur (3m20) ainsi que les mécanismes d’inhibitions et l’excitabilité cortico-spinale.
• But secondaire : Des analyses supplémentaires sont réalisées afin d’évaluer l’influence psychologique sur l’équilibre. Notamment la peur de tomber, l’anxiété, la confiance en soi ou la stabilité durant la tâche à haute hauteur.
• Question de recherche : Est-ce que l’augmentation des oscillations posturales induite par l’augmentation de la hauteur et la modification de la stabilité est due à un changement au niveau des mécanismes d’inhibition et/ou à l’excitabilité cortico-spinale chez une personne en bonne santé âgé de 18 à 40 ans ?
Pour résumer, l’organigramme, en rouge, ci-dessous illustre comment nous avons fait nos choix méthodologiques afin d’atteindre nos objectifs :
2 Méthode
2.1 EchantillonCette étude a été réalisée auprès de 16 personnes volontaires en bonne santé (9 hommes et 7 femmes, âge = 29.1±5, taille = 172.4±9.8 cm, poids = 67.9±12.1 kg). Une femme et un homme étaient gauchers. Les personnes qui répondaient au profil d’exigences ont été contactées et informées de la nature de l’étude. Avant la participation, tous les sujets ont dû lire et signer un formulaire de consentement approuvé par l’Université de Fribourg.
2.2 Design de recherche
L’étude s’est déroulée sur quatre semaines. La première semaine était consacrée à l’installation de la plateforme et aux premiers tests des instruments de mesures. Les trois autres, à la réalisation de l’expérience. Pour chaque sujet, deux à trois heures de tests étaient nécessaires.
Fig. 8 : Déroulement de l’étude. SC = semaine du calendrier.
2.3 Procédure des tests
2.3.1 Conditions d’expériences
Les sujets devaient porter un pantalon court et ils étaient ensuite équipés d’un harnais de sécurité (figure 9).
L’expérience s’est déroulée dans les six conditions suivantes : 1. Debout sur la plateforme à hauteur du sol ;
2. Debout sur une surface instable à hauteur du sol ;
3. Debout sur la plateforme avec le haut du corps supporté par une barre à hauteur du sol ;
4. Debout sur une plateforme à 3m20 du sol ; 5. Debout sur une surface instable à 3m20 du sol ;
6. Debout sur une plateforme avec le haut du corps supporté par une barre à 3m20 du sol.
Recherche de
littérature Installation des infrastructures instrumentsTest des Mesures des sujets Analyse des données
SC23-26 SC26 SC26 SC27-29 SC35-38
Fig. 9 : Sujet équipé d’appareils de mesures.
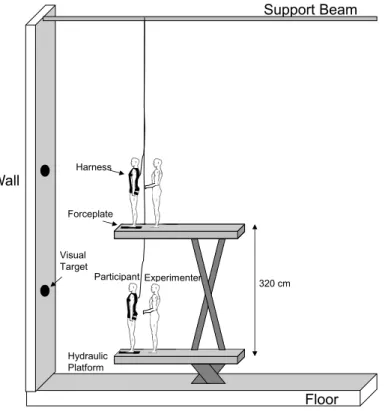
Les pieds étaient serrés l’un contre l’autre (pieds-nus), les bras le long du corps et le regard fixe droit devant (regard fixé sur la croix contre le mur à environ 10 mètres de distance). Pour les conditions 4, 5 et 6, le sujet était élevé à l’aide d’un élévateur hydraulique. A haute hauteur, les sujets étaient assurés par un harnais de sécurité en tout temps avec deux dégaines accrochées dans le dos, reliées à des sangles de manière ce qu’ils ne puissent ni les voir, ni les sentir. L’ordre des six différentes conditions étaient réparties aléatoirement, A : 1, 2, 3, 4 ,5, 6 ou B : 4, 5, 6, 1, 2, 3.
2.3.2 Plateforme de force
Pour les six conditions, le sujet avait les pieds qui reposaient sur une plateforme de force A 508 by 464 mm force plate (OR6-7. Advanced Mechanical Technology Inc., Watertown, MA, USA). Un petit tapis en feutre était intercalé entre la plateforme de force et les pieds du sujet. Le signal du COP a été échantillonné à 4000Hz.
Support Beam Harness Hydraulic Platform Floor Wall Visual Target Participant Experimenter 320 cm Forceplate
2.3.3 Enregistrement EMG
L’EMG a été enregistrée pour le TA droit ainsi que pour le SOL droit à l’aide d’électrodes bipolaires collées sur le muscle (Blue sensor P, Ambu®, Bad Mauheim, Germany). L’électrode de référence a été collée sur l’os de la partie médial du tibia. Pour minimiser l’impédance au contact de la peau de l’électrode, les poils ont été rasés avec un rasoir à sec et la peau nettoyée à l’aide d’alcool. L’EMG a été amplifié (1000 fois) avec une bande passante filtrée (10-1000 Hz). Les MEPs ont été enregistrés à l’aide d’un programme sur ordinateur (LabView® based, National Instruments®, Austin, TX, USA). La norme de référence de l’activité EMG a été enregistrée lorsque le sujet était assis sur une chaise avec les genoux à 90° et une position neutre de la cheville.
Un goniomètre a également été posé sur la cheville droite pour mesurer les changements d’inclinaisons du corps.
2.3.4 Questionnaires
A la fin de chaque condition à haute hauteur, les sujets ont répondu à un questionnaire à propos de leurs émotions afin de vérifier l’effet de la perception de la hauteur et l’augmentation de l’instabilité. Quatre questions étaient posées à chaque fois. La première question portait sur la confiance en soi, la deuxième sur la peur de tomber, la troisième, sur le sentiment de stabilité et la dernière question, sur le niveau d’anxiété des sujets. Les sujets ont répondu aux questions à l’aide d’une échelle allant de 0 à 100. 0 correspondait à « Pas du tout », 50 à « Modérément » et 100 à « extrêmement ».
Après avoir effectué les trois conditions à haute hauteur, les sujets devaient encore remplir un second questionnaire sur l’ensemble des conditions. Les questions étaient similaires aux questionnaires précédents mais complétées par des questions d’ordre général, telles que la perte de concentration, le sentiment de doute, les tremblements, le sentiment d’insécurité ou autres sensations. Les sujets devaient répondre aux questions avec une échelle allant de 1 à 9 ou 1 correspondait à « Je n’ai pas du tout ressenti cela », 5 à « J’ai ressenti cela modérément » et 9 à « J’ai ressenti cela de manière extrême ».
2.3.5 Acquisition des données TMS
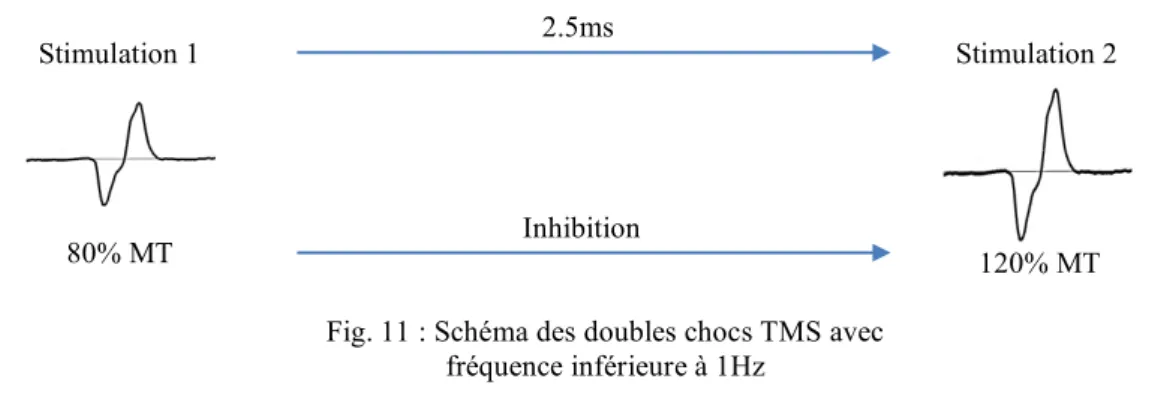
Pour cette étude, la TMS à été délivrée sur le cortex M1 par un appareil de stimulation MagPro X100 avec le stimulateur magnétique MagOption (MagVenture A/S, Farum, Denmark). La bobine de stimulation (D-B80) était en forme de cône, spécifique pour la stimulation des aires inter-hémisphériques et à été appliquée en dessus de la zone corticale spécifique pour les membres inférieurs (à l’aplomb du sillon inter-hémisphérique). Nous avons ciblé le SOL car ce muscle fournit généralement un seuil minimum (SM) bas et a une bonne fiabilité pour les MEPs (Cacchio et al., 2009). Pour localiser l’endroit optimal (hotspot) pour obtenir les MEPs dans le SOL avec la plus grande amplitude, le double cône a été déplacé systématiquement de 0.5cm en dessus de l’aire M1 gauche, en commençant sur le vertex. En règle générale, l’endroit optimal était 0.5cm à 1.5cm en dessous et latéral au vertex. La position idéale a été marquée à trois endroits à l’aide d’un feutre directement sur le crâne du sujet (trois marques réparties en triangle à l’intérieur du cône). Ces points sur le crâne ont permis de pouvoir retirer et remettre le casque avec le cône sans jamais perdre la position idéale exacte. Le hotspot pour le SOL a été réalisé au début du test (Chen et al., 1998), il permet l’obtention d’une réponse d’amplitude maximum pour une intensité minimum de stimulation. Cette acquisition des données permet également l’enregistrement des MEPs dans le TA car l’intensité de celui-ci est plus basse au repos que dans le SOL. Le SM était l’intensité de stimulation minimal capable de produire une réponse d’environ 50 µV d’amplitude dans le SOL au repos ou environ 200 µV d’amplitude si le muscle était activé volontairement dans 50% des cas pour dix stimulations consécutives (Rossino et al., 1994). Une stimulation intra-corticale simple à une intensité de 120% du seuil minimum (SM) a été délivrée pour évaluer les MEPs suivit 5 à 8 secondes plus tard par une stimulation double SICI. La SICI était une stimulation à 80% du SM suivit 2,5ms plus tard d’une stimulation à 120% du SM. Les intervalles et l’intensité de stimulations ont été choisis par rapport au protocole développé par Kujirai et al. (1993) et à l’étude similaire de Papegaaij et al. (2014) ainsi que pour les études pilotes montrant une bonne inhibition avec ces intervalles.
Les doubles chocs TMS exercés sur le cortex (M1) avaient une fréquence inférieure à 1Hz ce qui avait pour effet d’inhiber les neurones visés alors que les chocs simples TMS avaient une fréquence supérieure à 5Hz ce qui avait pour effet d’exciter les neurones visés.
Pour chaque condition, des stimulations simples (MEPs) ainsi que des stimulations doubles (SICIs) ont été envoyées. Un total de vingt stimulations simples et vingt stimulations doubles ont été délivrées pour chaque condition et ont été présentées toutes les 5 à 8 secondes. Les sujets ont eu 5 minutes de pause entre chaque condition et plus si c’était nécessaire.
2.4 Outils utilisés
Nous avons utilisé en plus des trois appareils de mesures principaux (TMS, EMG et Plateforme de force), un casque construit sur mesure pour accueillir le cône, un échafaudage muni d’une échelle, un ordinateur relié à trois écrans, du matériels divers d’escalades (baudriers, cordes, dégaines, mousquetons), un protocole de test, deux questionnaires, un rasoir jetable, des électrodes, du produit désinfectant pour la peau et un élévateur hydraulique pour chaque test.
2.5 Analyse des données
Les marqueurs pour les amplitudes de stimulations étaient placés en début et fin de l’onde négative afin de déterminer l’amplitude de la réponse. L’amplitude maximale sommet à sommet des MEPs a été enregistrée et calculée ainsi que celles des SICIs. Les SICIs sont exprimés en pourcentage des MEPs de référence.
Le déplacement moyen parcouru, la surface moyenne parcourue ainsi que le temps de déplacement moyen parcouru du COP dans les six conditions ont été calculés et illustrés. Les questionnaires ont été analysés et corrélés aux informations du COP. Ces données ont été utilisées pour juger du degré d’équilibre des sujets. Plus les valeurs du COP étaient élevées et moins l’équilibre des sujets était bon.
Stimulation 1 2.5ms
80% MT Inhibition 120% MT
Stimulation 2
Fig. 11 : Schéma des doubles chocs TMS avec fréquence inférieure à 1Hz
2.5.1 Analyses statistiques
Une statistique descriptive standard a été utilisée pour caractériser les sujets de l'étude. Microsoft Office Excel 2011 pour Mac, version 14.3.9 (Microsoft Corporation, Redmond, WA, USA) a été utilisé pour analyser les COPs. IBM SPSS Statistics 23.0 a été utilisé pour toutes les analyses statistiques, avec un niveau d'alpha à p<0.05* et p<0.01** pour indiquer une signification statistique. Toutes les variables ont été vérifiées pour la distribution normale avant l’analyse avec un test de normalité.
L’analyse principale était une mesure répétée ANOVA de la hauteur (basse, haute) comparée aux trois conditions (libre, supportée et instable) avec les amplitudes des SICIs et des MEPs. Si le test de sphéricité de Mauchlya était significatif, nous avons utilisé la correction de Greenhause-Geisser. Le coefficient de corrélation de Pearson a été utilisé pour confirmer les associations entre les amplitudes COPs (Dtot, Stot et Ttot) et les résultats du questionnaire.
3 Résultats
Les sujets de l'étude sont décrits dans le tableau 1. Pour deux participants, le SM était trop élevé et nous avons dû arrêter les tests et chez une personne les mesures de la SICI n’étaient pas valables. Pour deux autres participants, les résultats du COP présentaient également des valeurs erronées et ont dû être supprimées des analyses.
Tab. 1 : Description des sujets de l’étude. N (f/h) Age (année) Taille (m) Poids (kg) rSM80% (watt) Test de l’équilibre 11 (4/7) 29.08±4.71 1.74±0.04 69.75±12.87 48.58±7.39
Test des amplitudes SICI 13 (5/8) 28.64±5.11 1.72±0.10 67.14±12.07 47.14±7.21
Précision. Toutes les valeurs sont des valeurs moyennes ± Ecart type mentionné. N=nombre de sujet ; f=femme ;
h=homme. rSM80%= 80% du seuil minimum. 3.1 COP
La figure 12 illustre les résultats du COP pour la distance moyenne parcourue pour les trois conditions à basse et à haute hauteur. La distance parcourue est toujours plus grande lorsque le sujet se trouve à haute hauteur qu’à basse hauteur dans les trois conditions. Les valeurs moyennes dans la condition supportée sont entre 79.3cm et 101.4cm et entre 157.9cm et 270.2cm dans la condition libre. C’est environ 84% de moins que pour la condition instable (valeur moyenne de la distance parcourue entre 293.3cm et 666.2cm).
0 200 400 600 800 1000 1200
FREE UNSTABLE SUPPORTED
CO
P
D
to
t [
cm
]
LOW HIGHFig. 12 : Graphique du COP Dtot [cm]. **Différence significative entre la condition à basse
**
Pour la condition libre, la différence de hauteur est significative (p=0.002) ainsi que dans la condition instable (p=0.00) mais pas pour la condition supportée (p=0.16). La condition où les sujets ont effectué le moins de distance est la condition supportée à basse hauteur et celle où les sujets ont effectué la plus longue distance est la condition instable à haute hauteur. La figure 13 illustre le COP de la surface moyenne parcourue des sujets dans chaque condition à basse et à haute hauteur. La surface représente la moyenne de l’aire totale parcourue par les sujets. Les résultats sont similaires à ceux obtenues pour la figure 12. Les valeurs moyennes dans la condition supportée sont de 0.76cm2 et entre 1.26cm2 et 3.90cm2
dans la condition libre. C’est environ 89% de moins que pour la condition instable (valeur moyenne de la surface parcourue entre 3.21cm2 et 12.12cm2). Pour la condition libre, la différence de hauteur est significative (p=0.002) ainsi que dans la condition instable (p=0.004) mais pratiquement inexistante pour la condition supportée (p=0.50). La condition où les sujets ont parcouru la moins grande surface est la condition supportée à basse hauteur et celle où les sujets ont parcouru la plus grande surface est la condition instable à haute hauteur. On remarque également un grand écart type dans la condition instable (±11.3).
0 5 10 15 20 25
FREE UNSTABLE SUPPORTED
CO
P
St
ot
[c
m
2]
LOW HIGHFig. 13 : Graphique du COP Stot [cm2]. **Différence significative entre la condition à basse hauteur et à haute hauteur(p<0.01).
**
La figure 14 illustre le temps de déplacement moyen effectué par les sujets pour les trois conditions à basse et à haute hauteur. Ces résultats sont proportionnels à la distance et à la surface parcourue moyenne. Il y a toujours un temps de déplacement plus long à haute hauteur dans les trois conditions. Les comparaisons des T-tests relèvent des différences significatives dans toutes les conditions ; libre (p=0.002), instable (p=0.00) et supportée (p=0.05). Les valeurs moyennes dans la condition supportée sont entre 0.40s et 0.55s et entre 0.86s et 1.48s dans la condition libre. C’est environ 84% de moins que pour la condition instable (valeur moyenne du temps de déplacement entre 1.60s et 3.64s).
0 1 2 3 4 5 6
FREE UNSTABLE SUPPORTED
CO
P
Tt
ot
[s
]
LOW HIGHFig. 14 : Graphique du COP Ttot [s]. **Différence significative entre la condition à basse hauteur et à haute hauteur(p<0.01). *Différence significative entre la condition à basse
hauteur et à haute hauteur(p<0.05).
**
**
3.2 Réponses psychologiques
Les résultats du questionnaire ont été comparés lors des différentes conditions ainsi qu’avec les données du COP pour la distance totale parcourue. Les résultats sont illustrés dans les deux tableaux (Tab. 2 et Tab. 3) et sur le graphique (figure 15) ci-dessous. On observe une corrélation significative entre la peur et le rapport du COP Dtot dans toutes les conditions.
Tab. 2 : Comparaison du sentiment de peur avec le rapport du COP Dtot des trois conditions
Sentiment de peur %FREE %UNST %SUPP
p-value 0.048* 0.002** 0.013*
corrélation 0.581 0.797 0.689
Précision. **Différence significative (p<0.01). *Différence significative (p<0.05). Corrélation = coefficient (r)
de corrélation de Pearson. %FREE = rapport COP HH/LH condition libre ; %UNST = rapport COP HH/LH condition instable ; %SUPP = rapport COP HH/LH condition supportée.
Les résultats du questionnaire entre la condition libre et la condition instable à haute hauteur démontrent toujours une différence significative pour les sentiments de confiance, pour la peur et pour la stabilité. Entre la condition libre et la condition supportée, on observe seulement une différence significative pour le sentiment de peur. C’est la même chose entre la condition supportée et la condition instable. La peur est donc le sentiment qui est le plus affecté par les changements de condition.
Tab. 3 : Comparaison des trois conditions testées à haute hauteur et les résultats du questionnaire.
Sentiment de confiance FREE-UNST FREE-SUPP SUPP-UNST
p-value 0.001** 0.588 0.414 corrélation 0.764 0.152 0.228 Sentiment de peur p-value 0.000** 0.030* 0.034* corrélation 0.882 0.559 0.550 Sentiment de stabilité p-value 0.011* 0.357 0.800 corrélation 0.635 0.256 0.072
Précision. **Différence significative (p<0.01). *Différence significative (p<0.05). Corrélation = coefficient (r)
La figure 15 illustre les réponses du questionnaire posées après chaque condition à haute hauteurs (libre, instable et supportée).
On peut observer que les sujets sont plus en confiance, plus stable et ont le moins peur lors de la condition supportée (valeur comprise entre 96.67 et 99.00). Ils obtiennent également des meilleurs résultats lors de la condition libre (valeur comprise entre 85.00 et 91.67) à comparer de la condition instable (valeur comprise entre 59.33 et 78.30). Le sentiment de stabilité est le facteur qui est toujours le plus faible et qui décroit le plus pendant la condition instable. Les quatre facteurs psychologiques décroissent proportionnellement selon la difficulté de la tâche. Malgré la haute hauteur, l’anxiété est pratiquement inexistante dans la condition supportée (99) et relativement basse dans la condition libre (85) mais décroit (78.3) dans la condition instable.
Les effets de la perception de la hauteur sont minimes sur les effets psychologiques, c’est la difficulté de la tâche qui influence le plus les résultats.
Fig. 15 : Graphique des réponses du questionnaire. Confiance : 0 = pas confiance du tout, 100 = tout à fait confiance. Peur de tomber : 0 = très peur de tomber, 100 = pas du tout peur. Stabilité : 0 = pas du tout
stable, 100 = très stable. Anxiété : 0 = pas du tout anxieux, 100 = très anxieux.
0.00 20.00 40.00 60.00 80.00 100.00 120.00 140.00
FREE UNSTABLE SUPPORTED
Se
nt
im
en
t
de
s
su
je
ts
Questionnaire à haute hauteur Confiance Peur de tomber Stabilité Anxiété
3.3 TMS
Les résultats de la TMS sont illustrés à la figure 16. Les amplitudes SICIs sont exprimées en pourcentage des amplitudes MEPs. De façon générale, le muscle TA a des amplitudes MEPs et SICIs plus basses dans toutes les conditions par rapport au muscle SOL.
L’analyse de variance (ANOVA) des MEPs du SOL et du TA illustre une différence significative ainsi qu’une interaction entre la hauteur et l’équilibre. SOL : HAUTEUR (F1, 13 =
7.036 ; p= 0.020*), EQUILIBRE (F2, 26 =0.40 ; p= 0.00**), et HAUTEUR X EQUILIBRE (F2, 26 = 16.23 ; p= 0.00**). TA : HAUTEUR (F1, 13 = 8.80 ; p= 0.011*), EQUILIBRE (F2, 26 =
6.131 ; p= 0.007**), et HAUTEUR X EQUILIBRE (F2, 26 = 9.47 ; p= 0.00**).
L’ANOVA révèle aucune différence pour les amplitudes des SICIs dans le SOL entre la hauteur et l’équilibre : HAUTEUR (F1, 13 = 0.644 ; p= 0.437), EQUILIBRE (F2, 26 =0.05 ; p=
0.951), et HAUTEUR X EQUILIBRE (F2, 26 = 5.23 ; p= 0.12) mais une interaction
significative entre la hauteur et l’équilibre pour les amplitudes SICIs dans le TA : HAUTEUR (F1, 13 = 0.018 ; p= 0.896), EQUILIBRE (F2, 26 =0.465 ; p= 0.633), et HAUTEUR X
Fig. 16 : Groupe de données entres les conditions à basse et haute hauteur pour les amplitudes MEPs dans le SOL (A) et dans le TA (B) ainsi que les amplitudes SICIs dans le SOL (C) et dans le TA (D). **Différence significative entre la condition à basse hauteur et à haute hauteur (p<0.01). *Différence significative entre la
condition à basse hauteur et à haute hauteur (p<0.05). 0 0.2 0.4 0.6 0.8 1 1.2
FREE UNSTABLE SUPPORTED
Te st M EP a m pl itu de (m V) Amplitude dans le SOL LOW HIGH * A 0 0.5 1 1.5 2 2.5 3
FREE UNSTABLE SUPPORTED
Te st M EP a m pl itu de (m V) Amplitude dans le TA LOW HIGH C 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FREE UNSTABLE SUPPORTED
Am plit ud e SI CI n or m alis é Amplitude dans le SOL LOW HIGH B * 0 0.2 0.4 0.6 0.8 1 1.2
FREE UNSTABLE SUPPORTED
Am pl itu de S IC I n or m al is é Amplitude dans le TA LOW HIGH D * *
Une augmentation de l’amplitude des SICIs traduit une diminution de l’inhibition.
La figure 17 illustre le pourcentage d’amplitude entre la basse hauteur et la haute hauteur des MEPs et des SICIs dans le SOL dans les trois conditions.
Le pourcentage d’amplitude SICI dans le SOL est plus haut que celle des amplitudes MEPs dans les trois conditions. La plus grande différence est à observer dans la condition libre, le pourcentage de SICI est de 1.18mV alors que celui des MEPs est de 0.70mV. Les résultats sont similaires dans le TA sauf pour la condition instable où le pourcentage d’amplitude des MEPs (1.30mV) est plus grande que celle des SICIs (1.13mV) (figure 18).
0 0.5 1 1.5 2 2.5
FREE UNSTABLE SUPPORTED
%
Am
pl
itu
de
Amplitude dans le SOL MEP SICIFig. 17 : MEP = Amplitude MEP du SOL à haute hauteur / amplitude MEP du SOL à basse hauteur. SICI = Amplitude SICI du SOL à haute hauteur / amplitude SICI du SOL à basse hauteur.
La figure 18 illustre le pourcentage d’amplitude entre la basse hauteur et la haute hauteur des MEPs et des SICIs dans le TA dans les trois conditions.
La figure 19 démontre qu’il n’y a pas de corrélation entre les SICIs et le temps de
déplacement du centre de pression (COPTtot) entre la condition libre et la condition instable.
0.00% 50.00% 100.00% 150.00% 200.00% 250.00% 300.00% 350.00% 400.00% 0.00% 50.00% 100.00% 150.00% 200.00% 250.00%
Ch
an
ge
in
CO
P
ve
lo
ci
ty
(%
)
Change in SICI (%)
FREE UNSTABLEFig. 19 : Corrélation entre les pourcentages de changements dans la SICI et le COP (Ttot) entre les conditions à 0 1 2 3 4 5 6
FREE UNSTABLE SUPPORTED
%
Am
pl
itu
de
Amplitude dans le TA MEP SICIFig. 18 : MEP = Amplitude MEP du TA à haute hauteur / amplitude MEP du TA à basse hauteur. SICI = Amplitude SICI du TA à haute hauteur / amplitude SICI du TA à basse hauteur.
4 Discussion et conclusions
C’est la première fois qu’une étude est réalisée pour observer les effets provoqués sur l’équilibre, l’excitabilité cortico-spinale et les systèmes d’inhibition intra-corticale, en variant différentes hauteurs et différentes conditions sensorielles.
4.1 Équilibre et effets psychologiques
Les résultats confirment les hypothèses avancées sur l’équilibre avec les données du COP et les résultats du questionnaire. Une augmentation des oscillations du COP était attendue ainsi qu’une augmentation des effets psychologiques (peur de tomber, perte de confiance en soi, sentiment d’instabilité et anxiété) en lien avec l’augmentation de la hauteur et de l’instabilité. Les résultats sont contraires aux études réalisées auparavant sur l’effet de la hauteur et les réactions émotionnelles (Davis et al., 2009 ; Carpenter et al., 2001 ; Cleworth et al., 2012). Seul l’étude de Davis et al. (2009) obtient également une augmentation de l’amplitude des déplacements du COP lors de l’augmentation de la hauteur si elle est accompagnée du sentiment de peur.
Les deux perturbations (augmentation de la difficulté de la tâche ou l’augmentation de la hauteur) ont un effet sur l’équilibre et le contrôle de la posture. Les valeurs du COP, que ce soit pour la distance, la surface ou la vitesse de déplacement totale parcourue par les sujets sont plus basses en condition à basse hauteur qu’a haute hauteur et également plus faibles dans la position debout supportée à comparer à debout libre ou à debout sur une plateforme instable.
Les données du questionnaire viennent également appuyer les résultats du COP : plus la difficulté de la tâche augmente et plus les facteurs émotionnels tels que la peur de tomber, le manque de confiance ou le sentiment d’instabilité augmentent.
La figure 20 ci-dessous illustre les effets de l’augmentation de la hauteur et de l’instabilité sur le COP.
Anxiété, peur de tomber, augmentation de la hauteur / Difficulté de la tâche
Déplacements, surfaces et vitesse du COP
4.2 Excitabilité cortico-spinale et inhibition
4.2.1 Les effets de la modification de la hauteur
Les effets attendus sur les amplitudes MEPs et les inhibitions intra-corticales lors de l’augmentation de la hauteur ne correspondent pas tout à fait à nos attentes. Les hypothèses étaient que plus la hauteur augmente et plus les inhibitions baisses pendant que les amplitudes MEPs devaient augmenter. Cependant, l’augmentation de la hauteur implique une diminution de l’amplitude MEP dans toutes les conditions que ce soit pour le muscle SOL ou pour le muscle TA. La seule exception est lors de la condition instable pour le TA. La SICI elle diminue à haute hauteur à comparer de celle à basse hauteur dans toutes les conditions pour le SOL et le TA avec une exception lors de la condition instable (dans le SOL). L’analyse de variance de la SICI confirme seulement une interaction entre la hauteur et l’équilibre dans le TA mais pas dans le SOL.
Il y a des débats à propos de la relation entre la modulation de la SICI et l’augmentation des amplitudes MEPs (Nikolova et al., 2006). Les présents résultats sont cohérents avec l’idée que la modulation de la SICI ne conduit pas forcément à l’augmentation de l’excitabilité cortico-spinale (Reis et al., 2008).
La figure 21 ci-dessous illustre les effets de la modification de la hauteur sur les excitabilités cortico-spinales et les inhibitions.
Anxiété, peur de tomber, augmentation de la hauteur
Amplitudes MEP SICI
Fig. 21 : Résumé de l’effet de l’anxiété, la peur de tomber et l’augmentation de la hauteur sur l’amplitude MEP et la SICI pour le SOL et le TA.
4.2.2 Les effets de la modification de la stabilité
Lors de l’augmentation de l’instabilité, l’hypothèse concernant les SICIs et les MEPs à été vérifiée. L’inhibition a diminuée dans le SOL et dans le TA dans toutes les conditions plus l’instabilité a augmenté. Des études sur les activités volontaires et l’influence de la vieillesse sous différentes conditions sensorielles obtiennent des résultats qui vont dans le même sens que les nôtres. Papegaaij et al. (2016) observent une baisse de l’inhibition lors de la présence d’un challenge pour le contrôle de la posture qui s’amplifie encore avec l’augmentation de l’âge. Une réduction de la SICI proportionnelle à l’augmentation de la difficulté de la tâche est associée à une plus grande amplitude de déplacement du COP. La réduction de la SICI augmenterait l’excitabilité de M1 et par conséquence le nombre de solutions moteurs disponibles (Papegaaij et al., 2004).
À l’inverse, les amplitudes MEPs ont augmenté dans le SOL et dans le TA dans toutes les conditions avec la difficulté de la tâche, comme pronostiqué. Il y a une différence inverse minime dans le TA entre la condition supportée (0.87mV) à comparer de la condition libre (0.81mV).
Une augmentation des MEPs traduit une facilitation de l’excitation cortico-spinale qui pourrait expliquer la facilitation de l’excitabilité de M1 proposé par Papegaaij et al. (2004). L’étude de Tokuno et al. (2009) quant à elle, a observé des résultats contraires aux nôtres concernant les amplitudes MEPs. Elles ont diminué dans le SOL et dans le TA lorsque les sujets passaient de la condition supportée à la condition debout libre, donc lorsque le contrôle de la posture devenait plus important. Ils ont également observé une augmentation du H-réflexe en passant de la station supportée à la station debout libre. Ils en déduisent donc que l’augmentation de l’excitabilité cortico-spinale n’est probablement pas impliquée dans les oscillations du contrôle postural mais que le contrôle de l’équilibre serait contrôlé plutôt au niveau spinal et/ou au niveau sous-cortical.
Les résultats de Hoffman et Koceja (1995), soutiennent d’avantage nos résultats et expliqueraient le lien entre la diminution de l’excitabilité spinale et la facilitation des excitations cortico-spinales lors de la régulation de la posture (sans effet de la hauteur). Ils ont observé une diminution du H-réflexe plus le besoin de rétablir la posture était important (yeux fermés VS yeux ouverts).
L’effet du H-réflexe aurait pu nous permettre de déterminer si l’augmentation de l’excitabilité cortico-spinale venait du cortex moteur et/ou plutôt de l’excitabilité spinale mais nous n’avons pas utilisé cette méthode. Cependant, l’étude de Sibley et al. (2007) démontre que quand le H-réflexe diminue, l’amplitude MEP augmente. On peut donc déduire que l’excitabilité cortico-spinale vient de l’excitabilité du cortex moteur.
Par contre, le manque de littérature ne nous permet pas de tirer des conclusions sur l’influence des inhibitions lors du contrôle de la posture ni de faire de lien avec l’excitabilité cortico-spinale. On observe une diminution de la SICI lors de l’augmentation de la hauteur et de l’instabilité ce qui veut dire qu’elle est impliquée dans le contrôle de l’équilibre en situation de stress mais nous n’avons pas plus d’informations sur l’effet de l’inhibition.
De manière générale, les amplitudes MEPs sont plus grandes dans le muscle TA dans toutes les situations à comparer de celles du muscle SOL. Ces différences peuvent être dues au fait que le SOL est déjà plus impliqué en position debout et a donc une moins grande variation possible.
La figure 22 ci-dessous illustre les effets de la modification de la difficulté de la tâche sur les excitabilités cortico-spinales et les inhibitions.
Difficulté de la tâche
Amplitudes MEP SICI
Fig. 22 : Résumé de l’effet de l’augmentation de la difficulté de la tâche sur l’amplitude MEP et la SICI pour le SOL et le TA
4.3 Limite de l’étude
Adkin et al. (2000) prouvent que l’ordre de passage des conditions testées (de bas en haut ou de haut en bas) a un effet sur les déplacements et la fréquence du COP. Nous avons appliqué un ordre de passage aléatoire entre les conditions à basse ou à haute hauteur et nous n’avons pas analysé les résultats séparément entre les deux différents groupes pour observer s’il y avait eu des différences.
Une autre limite de l’étude était la hauteur de la condition surélevée. Les sujets ne ressentaient pas de sentiment de peur très prononcé lorsqu’ils étaient en haut de la plateforme à trois mètres du sol. Il aurait fallu encore augmenter la hauteur de deux ou trois mètres pour obtenir les effets souhaités.
4.4 Conclusions
Cette étude révèle que les participants sains réduisent leurs excitabilités cortico-spinales en présence d’une menace posturale imposée par la station debout au bord d'une plate-forme surélevée mais pas par l’augmentation de la difficulté de la tâche. L’augmentation de la hauteur et de l’instabilité sont associées à l’augmentation de la vitesse, la surface et la distance de déplacement du COP. Les circuits moteurs qui contrôlent les muscles de la jambe lors du contrôle postural sont modulés différemment selon le contexte. La diminution de l’inhibition intracortico-spinale est impliquée dans le contrôle de l’équilibre en situation de stress ou d’instabilité, mais d’autres études sont nécessaires pour clarifier les mécanismes de régulation de l’équilibre chez l’homme.
Inhibitions
Fig. 23 : A = Résumé de l’effet de la difficulté de la tâche sur le déplacement du COP, l’amplitude MEP et la SICI. B = résumé de l’effet de l’anxiété, la peur de tomber et l’augmentation de la hauteur sur le déplacement du COP, l’amplitude MEP et la SICI. Il y a une exception dans la condition instable pour
l’amplitude MEP du TA et une pour l’amplitude SICI du SOL. Difficulté de la tâche
A
B
Amplitudes MEP Déplacements COP
Anxiété, peur de tomber, augmentation de la hauteur
Bibliographie
Abbruzzese, G., Assini, A., Buccolieri, A., Schieppati, M., & Trompetto, C. (1999). Comparison of intracortical inhibition and facilitation in distal and proximal arm muscles in humans. Journal of Physiology, 514, 895-903.
Adkin, A. L., Frank, J. S., Carpenter, M. G., & Peysar, G. W. (2000). Postural control is scaled to level of postural threat. Gait & posture, 12(2), 87-93.
Adkin, A. L., Frank, J. S., Carpenter, M. G., & Peysar, G. W. (2002). Fear of falling modifies anticipatory postural control. Experimental brain research, 143(2), 160-170.
Baker, S.N., Kilner, J.M., Pinches, E.M., & Lemon, R.N. (1999). The role of synchrony and oscillations in the motor output. Exp Brain Res 128, 109-17.
Bazalgette, D., Zattara, M., Bathien, N., Bouisset, S., Rondot, P. (1987) Postural adjustments associated with rapid voluntary arm movements in patients with Parkinson's disease. Advance in Neurology, 45, 371-374.
Bazergui, A., Bui-Quoc, T., Biron, A., McIntyre, G., & Laberge, C. (2002). Résistance des matériaux, troisième edition. Canada: Presses internationales polytechnique.
Beloozerova, I. N., Sirota, M. G., Swadlow, H. A., Orlovsky, G. N., Popova, L. B., & Deliagina, T. G. (2003). Activity of different classes of neurons of the motor cortex during postural corrections. Journal of Neuroscience, 23, 7844-7853.
Bernard-Demanze, L., Burdet, C., Berger, L., & Rougier, P. (2004). Recalibration of somesthetic plantar information in the control of undisturbed upright stance maintenance.
Journal of integrative neuroscience, 3(4), 433-451.
Bloem, B. R., Steijns, J. A., & Smits-Engelsman, B. C. (2003). An update on falls. Current
opinion in neurology, 16(1), 15-26.
Bouisset, S. (1991). Relation entre support postural et mouvement intentionnel: Approche biomécanique. Association des Physiologistes, 77-92.




![Fig. 12 : Graphique du COP Dtot [cm]. **Différence significative entre la condition à basse **](https://thumb-eu.123doks.com/thumbv2/123doknet/14950759.668115/26.892.154.746.787.1132/fig-graphique-cop-dtot-différence-significative-condition-basse.webp)

![Travail de fin d'études[BR]- Travail de fin d'études : "La question de la protection des droits fondamentaux dans l'Union européenne à la lumière de l'avis 2/13 de la Cour de justice de l'Union européenne"[BR]- Epreuve de casus interdisciplinaire](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)