The Analysis and Design of a High-Power, High-Efficiency Generator
By
Andre D. Brown
Submitted to the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degrees of
Bachelor of Science in Electrical Science and Engineering
And Master of Engineering in Electrical Engineering and Computer Science at the Massachusetts Institute of Technology
May 21, 1999
C Copyright 1999 MCMXCIX Andre D. Brown. All rights reserved. The author hereby grants to M.I.T. permission to reproduce and
distribute publicly paper and electronic copies of this thesis and to grant othe ht to do so.
Author
Department of Electrical Engineering and Computer Science May 21, 1999 Certified by_____________________________
C e e
6
V
Jeffrey H . Lang
Thesis Co-Supervisor Certified by ( Dr. Thomas A. Keim Thesis Co-Supervisor Accepted by Chairman,Table of Contents
Heading
Chapter 1. Introduction
1.1 Background
1.2 Tour of Thesis
Chapter 2. The Generator Model
2.1 Dimensions
2.2 Winding Structure
2.3 Differences Between a Real Generator
and the Modeled Generator
2.4 Summary
Chapter 3. The Design Process
3.1 Design Program
3.2 Summary
Chapter 4. Generator Model
4.1 Air Gap Inductances
4.1.1 Stator and Rotor Self Inductances
4.1.2 Stator-Stator Mutual Inductance
4.1.3 Rotor-Stator Mutual Inductance
4.2 Leakage Inductance
4.3 Total Inductances
4.4 Resistance
4.5 Performance Analysis
4.5.1 Maximum Number of Armature Turns
4.5.2 Back-Electromotive Force
4.5.3 Air Gap Magnetic Flux Density & Tooth Saturation
4.5.4 Back-Iron Thickness
4.6 Summary
Page
6
6
8
9
10
10
13
13
14
14
16
18
18
18
20
20
21
22
23
24
24
25
27
31
32
Chapter 5. Results
33
5.1 Performance Specifications
33
5.2 Optimum Generator
34
5.3 Summary
38
Chapter 6. Summary, Conclusions & Suggestions for Future Work
41
References
43
Appendices
44
Appenix A. gendesign.m
44
Appenix B. init.m
49
Appenix C. rng.m
50
Appenix D. sdim.m
51
Appenix E. cdim.m
52
Appenix F. lumpparam.m
54
Appenix G. perfm
55
Appenix H. cost. m
60
Appenix I. check.m
62
Appenix J. Mean Path Length
63
Acknowledgments
First, and foremost, I would like to give praise and honor to the Almighty GOD for giving me life, health, strength, and knowledge. Without HIM, I would be nothing and my stay and MIT would not have been possible. I thank HIM for HIS mercy and saving grace, and for never
leaving my side even though I have strayed time and time again.
My parents, Harvey and Gloria Sanders, for providing the daily encouragement and support,
financially and emotionally. I love them very dearly.
My family and friends in Michigan, most notably my sister, niece and special friend who were
always there for me.
I especially would like to express my supreme gratitude the MIT/Industry Advanced Automotive
Electronics Consortium for funding my graduate program. I would like to thank all of the member companies for always providing the greatly appreciated advice and guidance.
I would like to thank my friends in Chi Alpha Christian Fellowship for their prayers and support:
Andres Tellez, Dedric Carter, David Estrada, Aaron Maldonado, Ted Weatherly, and Mike Olejarz.
Last, but certainly not the least, my advisors: Jeffrey Lang, Tom Jahns, and Tom Keim. Their guidance and support throughout have been outstanding. Their knowledge is unmatched. I learned so much from them in such a little time. I feel very appreciative for being allowed complete my thesis under their supervision. I am indebted to them. I sincerely thank all of you.
The Analysis and Design of a High-Power, High-Efficiency Generator By
Andre D. Brown Submitted to the
Department of Electrical Engineering and Computer Science May 21, 1999
In Partial Fulfillment of the Requirements for the Degree of Bachelor of Science in Electrical Science and Engineering
And Master of Engineering in Electrical Engineering and Computer Science
ABSTRACT
The purpose of this thesis is to design and optimize a new automotive generator that meets the increased power requirements set by the automotive industry. Specifically, this thesis develops the wound field synchronous generator. The design engine employs iterative Monte Carlo synthesis followed by analysis and evaluation. To do so, the generator is modeled for electromechanical performance and materials cost, and these models are used to develop a computer-based design engine. Finally, the design engine is run to develop a 6 kW generator that appears to be quite inexpensive. In particular, an optimal direct-drive generator is found to have a diameter and length of 290 mm and 127.5 mm, a mass of 34.9 kg, a cost of 64 dollars, and an efficiency of 86% at 1500 rpm and 3.25 kW. An optimal 2x-geared-drive generator is found to have a diameter and length of 196 mm and 141.7 mm, a mass of 20 kg, a cost of 38 dollars, and an efficiency of 88.8% at 1500 rpm and 3.25 kW.
Thesis Co-Supervisor: Jeffrey H. Lang
Title: Professor, Associate Director, Laboratory for Electromagnetic and Electronic Systems Thesis Co-Supervisor: Dr. Thomas A. Keim
1. Introduction
1.1 Background
Over the years, the Lundell generator, the current generator in today's automobiles, has
constantly been optimized to reduce cost. These optimizations have resulted in a generator that is sufficient for today, but because power density and efficiency have been sacrificed, it will not be sufficient for the future.
The number of loads in an automobile is increasing, and also the power required to drive these loads is growing. Different features that are being offered in cars today will require much greater power, totaling approximately six kilowatts. Examples include air-conditioning, power windows, locks, seats and steering, compact disc players, as well as numerous features that are essential to the safety of drivers and passengers. Because of this increase in power, efficiency is now much more important than before. The Lundell generator has an efficiency of approximately fifty percent [1], thus if it were to supply power to these loads, six kilowatts will also be lost, which is unacceptable. With this efficiency, other problems will be created, most importantly, a
decrease in fuel efficiency and the need to remove six kilowatts of heat. The automotive industry has determined that this level of efficiency is unacceptable.
The possibility of the Lundell generator being the generator for future cars is not a far-fetched idea. It is believed that the output capability of the Lundell generator is not fully utilized in the present system [5], due to the high number of cost optimizations. There are several reasons to believe that the development of an acceptable Lundell generator is possible. Because of the shape of the alternator, it is fairly simple to change the geometry of the machine to increase the power output [4]. Also, the Lundell generator performs well over a large speed and temperature range; it is relatively inexpensive to manufacture; and it comes in a small package and is desirable
cannot be overlooked. It has high rotor inertia [7] that leads to belt slippage. The Lundell generator also appears to be too vulnerable to load dump. In addition, it is susceptible to centrifugal forces at high speeds if more claws are added [3]. Given the current geometry, the losses due to conduction in the rotor and armature, windage, and pole face are extremely high. To achieve the desired power rating, current could be increased, but because there is limited space within the structure this will not be an easy accomplishment. There is limited space for the field coil [7] and the gauge distribution of the wire cannot continue to grow [2] because the size of the generator cannot grow. Lastly, since the Lundell generator is belt-driven, it is possible to increase the belt ratio to increase the power output, but the mechanical limit to that ratio will not allow for the achievement of the desired six kilowatt goal [2]. Upon examining these issues, it appears possible for the Lundell generator to be revamped to meet the needs of the automotive industry and so it still serves as the baseline generator, even at six kilowatts of output power. However, because of its disadvantages, new designs must be considered. The focus of this thesis is the study of a wound-field synchronous generator (WFSG). This class of generator was chosen based on its minimal use of power electronics, absence of commutating brushes, and its
electromechanical performance.
The specifications for a future generator are to deliver 6 kW at an engine speed of 6000 rpm and 4 k.W at 600 rpm. The latter specification is more important because it corresponds to the highest torque. The power specifications stated above are much larger than the current
estimated output of 1.4 kW at 6000 rpm [3]. In addition to increased power, increased efficiency is required. As a design specification the generator and its electronics must be at least 75% efficient at 3.25 kW at 1500 rpm. Last, but not least, is cost. This new generator must be cost effective, and cost is dependent upon the size and weight of the machine. The generator must be designed and optimized so that all specifications, power, efficiency and others, are met, but it also must be reasonable in terms of cost. What cost is reasonable will be determined by industry upon
completion of the design. From these specifications, a generator that is adequate for future vehicles will be designed.
1.2 Tour of Thesis
The remainder of this thesis focuses on the design and evaluation of theWFSG, in both direct-drive and geared-direct-drive configurations. The direct direct-drive generator operates at a speed that is identical to that of the engine, while the geared-drive generator operates at two times the engine speed. The best generator designs and a comparison between the two configurations are presented in Chapter 5. To evaluate these designs, an understanding of the method used to find the optimum generators is necessary. Chapter 2 begins by defining several important mechanical characteristics as well as the winding structure of the WFSG. Chapter 3 discusses how the design engine operates. A flow chart is provided highlighting the operations at each stage. Chapter 4 presents the models and analyses used in the performance analysis. A detailed description is provided. Chapter 5 discusses the results found for the two generator configurations. Chapter 6 presents closing remarks about the optimal generators and gives suggestions for improving the design yet further. A listing of the software implementation of the design engine is given in the Appendices.
2
The Generator Model
This chapter describes the physical characteristics of the WFSG as modeled here. Included in the description are definitions of its geometric dimensions, and a description of its winding structure. In addition, this chapter presents a brief discussion of the differences between a real generator and the generator modeled.
A 12-pole generator is shown in Figure 2-1. The outer lamination is a stator lamination and has 72 slots, or six for each pole. Note that the teeth between slots have parallel side-walls. The inner lamination is a rotor lamination and it has 72 slots to match that of the stator, and teeth with parallel side-walls. Finally note that this machine is not the optimal generator designed later. Rather it is presented here as characteristic of the type of generator modeled in this thesis.
2.1 Dimensions
Figure 2-2 shows half of a 12-pole generator, and defines the radial dimensions that characterize the design of the generator. There are six radii; the stator and rotor each have three. The radii on the rotor are as follows: Rin, inner generator radius; Rbr, inner radius to the bottom of a rotor slot;
and Rr,, outer radius of the rotor. The radii on the stator are as follows: Rsin, inner radius of the stator; Rb,, radius to the bottom of a stator slot; Rout, outer generator radius. Rbr, Rout, and Rbs are designed as random variables chosen by the simulation tool. Rsin depends upon the outer radius of the rotor and the length of the air-gap,g, which is designed as a random variable in place of Rsin. The inner stator radius is defined here for completeness. Note that Rin and Rout are selected after the magnetic flux has been determined to minimize iron mass while avoiding saturation.
Figure 2-2 also defines the angular dimensions that characterize the design of the
generator. The stator tooth pitch, 0,, is an angle that spans the width of one stator tooth at Rbs. The rotor tooth pitch, Or, is an angle that spans the width of one rotor tooth at Rbr. One dimension that is not shown, but one that is an important parameter, is the machine length, Lnaci. It is measured axially and is referred to as the stack length.
2.2 Winding Structure
The generator modeled here is a three-phase machine. It has two slots per phase belt, and a double layer winding that is wound with full pitch. These are characteristics similar to machines that are manufactured for automotive purposes. The main difference here is that each pole pair is
modeled as having a separate winding so that all pole pairs can be wound in parallel to reduce the phase inductance and back-electromotive force (BEMF). Figures 2-3 and 2-4 show how one phase of the generator is wound. This winding pattern can be extended to the remaining phases by shifting the pattern by two slots per phase belt. In Figure 2-3, the terminal lead is shown as
0t
Or Rbr Rrout Rbs FoutFigure 2-3: Generator poles and phase winding as viewed from the air gap with two turns per slot. The labeling is for the 12-pole generator shown in Figure 2-1. The current is positive for a down arrow, and negative for an up arrow.
a1 a2 -c3 -C4 bi b2 -a3 -a4 C5 c6 -b5 -b6 a2 3 a24 -Ci -C2 b2 b4 -ai -a2 c3 c4 -bi -b2
Figure 2-4: Layout of winding structure for one pole pair as viewed from the end of the generator.
The labeling is for the 12-pole generator shown in Figure 2-1.
splitting because the pole pairs are wound in parallel. Also note that Figure 2-3 shows only two turns per slot, but the generator can be wound with multiples of two turns per slot.
Key:
-. .- a23 a24
+al, a2 +a3, a4
2.3 Differences Between a Real Generator and the Modeled Generator
There are several differences between the generator shown in Figure 2-1 and a real generator that are worthy of mention here. First, the cross section shown in Figure 2-1 exhibits cogging. To eliminate cogging, a real generator would have either skewed rotor slots or a non-commensurate number of rotor slots. These characteristics are not modeled here in order to maintain simplicity. Second the generator in Figure 2-1 shows open slots. Most real generators have covers on the teeth that result in partially closed slots to reduce air-gap flux harmonics and the associated losses neither of these changes would materially impact the generator cost or any other attributesconsidered here. Again, this characteristic is not modeled here.
2.4 Summary
This chapter has laid the modeling foundation for following chapters, in particular Chapter 4 which discusses the magnetics of the generator. The variable definitions that are shown in Figures 2-1, 2-2, 2-3 and 2-4 are definitions that should be remembered for they will be used throughout Chapter 4.
3
The Design Process
This chapter presents an overview of the generator design process, and the MATLAB program used to implement that process. It also shows a simplified flow chart of the program. Details of the program are given in Appendices A-F.
The generator design process employs iterative Monte Carlo synthesis followed by analysis and evaluation. During synthesis, the physical construct of a generator is randomly created within a specified limited design space. During analysis, each generator is analyzed for its electromechanical performance. Finally, during evaluation, a list is created which contains a description of the least expensive generators that have acceptable electromechanical performance.
This thesis seeks a generator designed for automotive application. Both geared and direct drive generators are considered. To this end, there are several specifications that a generator must meet if it is to be considered as acceptable. First, a generator must be sized within specified mechanical limits in terms of its outer diameter, inner diameter, air-gap length and stack-length. Additionally, for the geared-drive generator, the ratio of its diameter to length, commonly referred to as its aspect ratio, must be acceptable. Second, a generator must also meet several electromechanical performance requirements. The magnetic flux density within its core must be below a saturation limit; the current density in its windings must be below a specified limit; it must meet efficiency standards at specified torque-speed points; and it must be able to deliver a
specified power envelope to the load. Beyond meeting these requirements, the best generator is determined strictly on the basis of cost.
3.1 Design Program
Figure 3-1 shows the logical flow of the generator design program which is implemented as a collection of MATLAB scripts. An outer shell, in the form of the MATLAB script, gendesign.m, guides program execution through this flow chart; a listing of this script is given in Appendix A.
The second block in the flow chart is the initialization block. This script initializes all constants, establishes the required electromechanical performance, and clears the list of least expensive generators. A listing of the initialization script, init.m, is given in Appendix B.
The synthesis block is third. Its job is to design the physical characteristics of each generator. The synthesizer contains several scripts: a random number generator, a script that applies these numbers to the design variables discussed in Chapter 2, and a script that continues generator design by determining other important variables from the synthesized variables. Listings for all three scripts are given in Appendices C-E.
In general, a random variable X is synthesized according to
X
= Xlow + (Xhigh - Xlow ) * 8
(3-1)
where X,10 and Xsg, are the lower and upper limits of X, and 5 is a random number uniformly
distributed between 0 and 1. For some variables Xl,0,, and Xgh are specified in the initialization
script, while for other variables these limits depend on variables that have already been
synthesized. The limits of the radii in particular are structured so that each radius is greater than those internal to it and less than those external to it.
The fourth block evaluates electrical parameters. This script determines the generator inductances and resistances. A detailed discussion of it is given in Chapter 4 and its script, lumpparam.m, is given in Appendix F. Also discussed in Chapter 4 is the performance analysis. This script evaluates power, the number of stator turns, internal flux densities and efficiencies as well as other optimization quantities. A listing of this script, perf m, is given in Appendix G.
The fifth block evaluates the total material cost of the generator. The cost depends solely upon the amount of steel and copper used by the generator; and is evaluated according to
Cost=y *m +y *m (3-2)
where Ys is the cost density of steel, m, is the mass of steel, y is the cost density of copper, and me is the mass of copper.
After determining the cost of the generator, the design program decides whether it should save the generator based on its electromechanical performance. It then compares the cost of generator to that of previously saved generators that meet the electromechanical specifications. Only then ten generators the lowest cost are saved during a single run. After evaluation, the design program returns to the synthesis block and iterates through the loop until the number of designs synthesized equals the number of specified iterations.
To effectively cover the design space, one million iterations are performed for each design effort. Next, once the lowest cost generator design is found, the design space is narrowed around its design and another million iterations are performed to optimize the design further.
3.2 Summary
An overall view of the design program is presented in this chapter. The Appendices A through I provide a full, annotated version of the MATLAB code used to implement the design program. A basic knowledge of how the program operates is necessary to understand the following chapters,
Figure 3-1: The design process showing the basic steps. It is labeled with descriptions.
No
4
Generator Model
This chapter presents a discussion of the electromechanical analysis of a generator once it is designed. It discusses in detail the method used to calculate inductances and resistances, followed by an explanation on the performance analysis. The performance analysis involves determining output power, stator turns, magnetic flux density, and efficiency. Both sections are
presented for only one phase, but by symmetry the characteristics of the remaining two phases can be found. A brief summary of the important analysis points concludes this chapter.
Note that for reasons that will become apparent, the inductances and resistances will be calculated assuming one turn per pole per slot. Later, in equations where resistances and inductances are used, the actual resistances and inductances will be expressed by the one turn values multiplied by the appropriate number(s) of turns to appropriate power. This permits explicit selection of the optimum number of turns.
4.1 Air-Gap Inductances
This section describes models of both air-gap and leakage inductances. It follows Appendix B of Electric Machinery, 41h Edition by Fitzgerald, Kingsley and Umans, which was published by
McGraw-Hill in 1983.
4.1.1 Stator and Rotor Self Inductances
The air-gap inductances modeled here are the stator and rotor inductances. The stator self-inductance calculations assume a 3-phase, full pitch generator with two turns per slot. The pole pairs are wound in parallel with the winding structure shown in Figure 2-4.
The magnetizing inductances are derived from a basic magnetic circuit model using the magnetomotive force (MMF) and the air-gap flux density, Bag. It depends on the number of turns, area, and the permittivity of free space. The MMF waveform is initially assumed to be square. Since only the space fundamental component is of concern, the MMF, 3, is
=
Ni
COS0
(4.1)
n 2
where N is the number of turns per pole pair, i is the current and 0 is the electrical angle around the air-gap. The air-gap flux density follows as
Bag -2 i0Ni cos 0 (4.2) 7C g
where g is the air gap length. The air-gap flux per pole, ct, can be determined by integrating the air-gap flux density over the area of one pole according to
j
Bag rd toNi L mach r (4.3)ng
2
where Lnach is the machine length and r is the average radius to the air-gap.
The air-gap self inductance of each stator phase per pole, assuming angularly concentrated windings, can now be found as
L = - = oN L mach r (4.4)
7t g
Because the generator actually has a distributed winding, a correction factor must be added to (4.4). This correction factor is termed the winding factor, kw, the winding factor for the winding pattern in Figure 2-4. Also, because we wish to write an expression for inductance with only one turn per slot, the number of turns, N, must be replaced by the minimum series turns per phase per pole pair, Nap, which is also the number of slots per pole per phase (in this case, 2). The air-gap inductance is now
4p (kN )2 r
L = 0 w ap mach (4.5)
ss 71 P g
The rotor self-inductance, Lif, is directly related to (4.5). The assumptions made for the stator are also made here. Therefore,
4pt0 L mahr
L = 0o(k N )2 mach P (4.6)
ff n wf f g
where kwr is the winding factor on the field and Nf is the number of series turns per phase per pole pair, which is effectively the series turns per pole pair because the rotor has only one phase and also the number of slots per pole, because this is a one-turn inductance. The number of pole pairs is not included because the rotor is wound in series.
4.1.2 Stator-Stator Mutual Inductance
The mutual inductance, M, between stator phases is assumed to be given by 1
M = - L (4.7)
2 ss
4.1.3 Rotor-Stator Inductance due to the Field
The mutual inductance between the rotor field winding and a stator phase arises from flux linked by both the stator and rotor windings. The analysis is similar to that presented in (4.1 -4.3), but both windings must be simultaneously considered.
From a basic magnetic circuit model with two windings, the flux linking both is a function of the current in both windings. As a result the mutual inductance is also a function of the geometry of both windings. Equation (4.3) applies here, except that it is a function of both the number of stator and the field turns. Since the stator is wound in parallel, an adjustment similar to that made in (4.4) is also made here. The mutual inductance between a stator phase and the rotor field winding, is defined as the variable, Lsr, is then
4
wkaN
L mahr
L =pkfNfw apjmach (4.8)
sr o f P g
The value given in (4.8) applies when the rotor winding is fully aligned with a stator phase; the mutual inductance is assumed to vary as a cosine function with the electrical angle measured from the fully aligned position.
4.2 Leakage Inductance
All the flux that links the stator and/or rotor windings does not cross the air-gap. Because of this
phenomenon, leakage inductance components are necessary. The leakage component of
inductance is generally difficult to find exactly. An approach related to the energy stored in a slot is taken here.
The magnetic intensity, H, is assumed to contain only the one component, that points directly across the slot as shown in Figure 4-1. By making this assumption, Ampere's Law is easily applied to find the magnetic intensity. The H field is given by
fH-dl = Total Current -> H W = NI a (4.9) y slot a D
slot
where Wio, is the average slot width, Ia is the current through phase a, N is the number of armature turns per slot, D3i10 is the height of a slot and the value of x is defined as the coordinate of height in the slot above its bottom.
The energy stored in a slot is directly determined from the H field. The energy is given
by D2
slot
N
2D
L
E = L
W
f
H2d
l_
slot mach
12
(4.10)
mach
slot
0
2 o
6 o
W
0
slot
H~
Dsio, Figure 4.1: A simple drawing of stator slot is shown. Notice how the H field only has one component.
_ _ Also shown are the dimensions of
the slot. Wsiot
By equating E to - L i2, the leakage inductance, L1, may be found. This inductance also must
2 1
be adjusted to comply with the winding structure. This adjustment involves using the series turns per phase per pole pair. The inductance is not divided by the square of the pole pairs because,
initially, the number of pole pairs multiplies the leakage inductance. This initial multiplication provides the inductance for the entire machine in one phase. Thus, leakage component is
p N L D
L = o ap mach slot (4.11)
1 3PW
slot
4.3 Total Inductances
Since both the stator phase inductance and leakage inductance are now known, several quantities can be found. The total self-inductance, Ls, for a stator phase is
4 (kN )2L r N L D
L =L +L = 0 w ap mach + o ap mach slot (4.12)
s ss 1 7E g 3P W
slot The synchronous inductance is
6 (kN )2 r pNL D
L =L +M+L = ( w ap mach + o ap mach slot (4.13)
syn ss
1
xp
g
3PW4.4 Resistance
The resistances of the stator and rotor windings both depend upon the number of turns; mean path length, Lmp, which are different for both laminations; the conductivity of copper, cy,; and the area of a slot, As.
The area of a slot can be calculated from Figure 4-1, by multiplying the slot depth by the average slot width. The stator and rotor slot areas are both calculated in the script, cdim.m, which is presented in Appendix E. The mean path length is more complex. A discussion of this calculation is found in Appendix J.
The stator phase resistance is
2N L
R= ap mps (4.14)
s aGpA P
c f ss
where the packing factor, pf, is defined as the percentage of the slot area devoted to the winding, Nap is the number of series turns per phase per pole pair, Lmps is the mean length of travel of copper wire on the stator for one turn, As is the area of a stator slot, and P is the number poles. This resistance accounts for the parallel winding structure by dividing by the square of the number of pole pairs. The resistance in (4.14) is for the entire generator. The square of the poles is not found because it is cancelled by the total number of turns per phase. The rotor resistance is similar in form to that of (4.12). It is
L
N P
R = mpr f (4.15)
rotor 2ac p A
c f sr
where P is the number of poles, Lmpt is the mean length of copper wire on the rotor, Asr is the area of a rotor slot and Nf is the number of field turns per pole pair.
4.5
Performance Analysis
The loads in an automobile require DC power, but a generator produces AC power. A 3-phase rectifier is therefore used to perform the required conversion. To maintain simplicity, it is assumed that the 3-phase rectifier has a constant voltage at its load with an assumed sinusoidal phase current. The analysis here then follows from the paper titled Analysis of Three-Phase Rectifiers with Constant Voltage Loads by Caliskan, Perrault, Jahns, and Kassakian. The goal of this section is to establish the number of armature turns, the back-electromotive force (BEMF), the number of field ampere-turns, calculate flux density, both air-gap and the flux across the tooth, and the optimum stator and rotor back-iron thickness.
There are several known quantities that are used throughout this section. In Chapter 5, they are discussed in detail because they are directly related to the performance requirements. The known quantities are the output power, Pa,, the current density, J, the rotor speed, n, the load voltage, VL, and the saturation flux density limit of the iron core, Bsat.
4.5.1 Maximum Number of Armature Turns
In the previous sections of this chapter, the analysis is based upon the assumption of one turn per stator slot for convenience. However, the actual generator design could have any number of turns per slot. To bound the number of turns, note that the stator amperes per unit area must not exceed a pre-specified limit, J, due to thermal concerns. Thus, a maximum number of stator turns can be found as
Jp A
N = J f s (4.16)
max I
P
I =out4I ou (4.17)
L
V
L
We may estimate Nmax by assuming that the rms phase current is equal to the DC load current.
Jp A V
N
=f
s L (4.18)max P
out
The approximations used here are crude, but in the course of this study it became evident that the favored designs do not have number of turns near Ninax. Nnax then serves as a boundary to limit the range of search. Since the optimum is being found far from the boundary, inaccuracy in the estimation of Nm.ax is relatively unimportant. The use of (4.18) is discussed in Chapter 5.
4.5.2
Back-Electromotive Force
The assumed constant-voltage rectifier model allows us to use the analysis found in Analysis of Three-Phase Rectifiers with Constant- Voltage Loads to determine the average load current. This average is 2V +4V
E 2
L
d
I =3 af 7(4.19)
L/ 7 N2X a cwhere Eaf is the BEMF, and Vd is the voltage drop across a diode and Na is the number of series turns per slot on the armature. The commutating reactance, Xc, is given by
6pt (k N )2 L r p N2 L D
X = 0 w Pap mach + o ap mach slot Q (4.20)
g 3P 2W
slot
Equation (4.20) is obtained by adding (4.12) and (4.7) and then multiplying by Q, the electrical angular frequency.
Preliminary designs were performed by requiring the stator output power at each of three operating points to be equal to the corresponding specified value. It was noted in these
preliminary designs that the low speed high power design point (600 rpm, 4000 watts) required a very substantial excitation power. As a result, the requirement at this design point has been interpreted as being 4000 watts net of excitation power. The following derivation shows how it is possible in closed form to calculate the BEMF which will result in the desired net power. The input power generated in one phase of the stator is found by multiplying (4.19) by the load voltage 2V +4V
KL3V
E 2( L d) P V I af 4.) in L(\ L L N 2X (4.21) a cwhere Na is the number of series turns per slot on the armature. The generated power can be equated to the sum of output power and rotor copper loss
P =-- P + N fI f 2R (4.22)
in 3 out f( fjrotor
where the NfIf term is the field ampere-turn product per pole pair. Nf appears in (4.22) because Rrotor is the value for Nr equal to 1. Note that a factor of 3 is present because there are 3 phases. The ampere turn product can next be written as a function of the BEMF
E
N I = af (4.23)
ff QN L a sr
Combining (4.21), (4.22), and (4.23) yields a single equation for the output power
9V
'2V
+ 4V
2
E
2
P = L E2 L d af R (4.24)
out nN2X af !Q N L I rotor
By manipulating (4.24), a quadratic equation in the BEMF can be found
2 2
2P QN L 3V4
E4 +E2 out a af _V L
1QLfIL
4
af
af
R
otorNX
R
af )
rotor
a
crotor
(4.25) + Na Laf) p 2 + 9 VL 2V +4Vj
=0 R 2 out 7r2 N 2X L d) rotor a c.)Equation (4.25) has two roots. Either both of the roots will be positive or both will be imaginary. If both are imaginary, then the generator cannot meet all the constraints. However, if the roots are positive real, the lowest root that is at least the line-to-neutral value of the internal voltage, is the optimal value for the Back EMF.
4.5.3
Air Gap Magnetic Flux Density & Tooth Saturation
The air-gap magnetic flux density is computed on the basis of the winding structure shown in Figure 2.4. The flux density in the air-gap, Bag, can be analyzed by determining the stator and rotor MMF. The flux density has a maximum value when the MMFs are aligned and a minimum value when they are misaligned. The flux density will therefore be a function of both the MMF magnitudes and the angle between stator and rotor magnetic axes, 6s,.
The armature and rotor MMF can be written as a function of the magnetic field intensity, H, by using Ampere's Law. By imagining a contour that circles one pole of the generator including both the stator and rotor, the total current can be determined. Again it should be remembered that the number of pole pairs divides the current through each phase because the pole pairs have separate windings. Also, at the instant where the current in one phase is
maximum, the current through the other two phases is half that of the peak current. The choice to have the peak current through phase a is done arbitrarily, the analysis can readily be extended to any of the phases.
The current contribution from each phase is doubled because there are 2 slots per phase per pole. Using Ampere's Law yields the peak magnetic intensities on the stator and rotor, Hs and H,
2(
2H g= - 4N N I S P sa a g (4.26)2H
g=N(N
I
r sf\ f fwhere Na is the number of armature turns per slot, Nsa and Nst, are the number of slots per pole on the armature and rotor, and NfIf is the series ampere-turn product for one rotor slot. Also, the
gross phase current is defined as, Ig. The current is multiplied by the number of pole pairs which represents the parallel winding structure. To be consistent with other values that are being taken from the AC side of the rectifier, such as the generated power which is used to calculate the Back EMF, the gross phase current is used. Its relation to the load current, IL, is
C
2
I =1 + f f ) rotor (4.27)
g L VL
The armature and rotor MMF over one pole can be extracted from (4.26), and taking the fundamental component and using algebraic techniques
k N N I
2 w sa a g (4.28) S EP
22
3 =-k N N I (4.29) r n wf sf f fwhere a winding factor has been added because the winding is distributed and has two layers. The two MMFs add vectorially, so it is necessary to determine 6
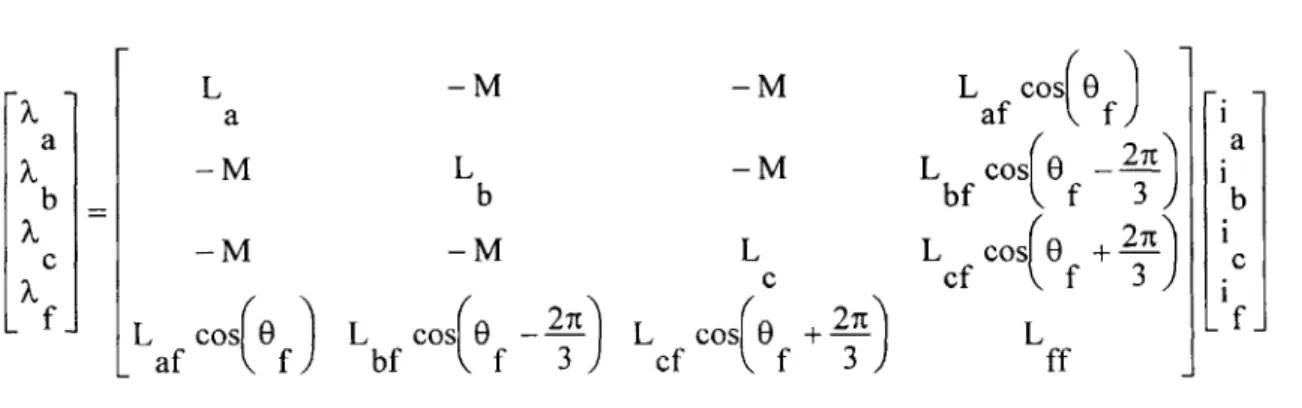
sr, the angle between them, in order to determine the total air-gap MMF. Figure 4.2 is essential in determining 5sr. The
figure shows a 4- by-4 matrix that relates the phase and rotor flux linkages to the inductance and phase and field currents.
L -M -M L cosr f -X a af kf)J a -M L -M L cos 0- 27 a b_ b bf f 3) b c - M - M L L cosc c 0cf f 3
L cos f L cos 0 2-j L cos 0 + L f
_af f ) bf (f 3 ) cf (f 3 ) ff_
Figure 4-2: Shows a 4x4 matrix that relates flux linkage, inductance. and current
By taking the derivative of the field flux linkage, kr, the torque, T, can be found
T = ak[i L cososj+i L cos
C
2-n)
L coss 2x i (4.30)86O a af f) b bf f 3 ) f f 3
Jf]
where the electrical angle between the rotor magnetic axis and the phase a magnetic axis is defined by Of. Torque is not a given quantity, therefore an equation that relates torque to a given quantity is desired. This is found by relating it to the input power
P.
= -- o
T (4.31)in m
where om is the mechanical angular velocity. The negative sign in (4.31) is because the analysis is performed for a generator.
Substituting (4.30) into (4.31) yields an equation for the generated power Po L
I-P = m sr f i sin o+i sin(Of _ 27 + i sin ( + 27C (4.32)
in 2 a f be 3) e f 3
i =ICos 0 ; i = I Cos 0 2 ;i=ICos 0 + 2T) (4.33)
a
L
Is)b
L
s
3)
c
L
s
3)
where Os is the electrical angle between phase a and the stator magnetic axes. By substituting (4.33) into (4.32) and applying trigonometric relations, a simplified equation can be found relating the input power to the angle between the magnetic axes,6r. Note that the angle found by subtracting 0, and 0,, is not the desired angle. If two vectors are imagined as representing the magnetic axes, the angle found is the one measured from tail-to-head as shown in Figure 4-2a. The correct angle is the one measured when the magnetic axes are positioned tail to tail as shown in Figure 4-2b. Rotor magnetic axis So Stator Stator .magnetic magnetic axis axis E-6s, 6 sr Rotor ymagnetic
Figure 4.2a: The angle axis
calculated using (4.31) Figure 4.2b: The desired
and (4.32). angle.
The angle between the magnetic axes can now be written as
2P
= sin- - in (4.34)
sr
Po N N I L I
m a f f af g
The magnetic flux density in the air-gap can now be found by using Figure 4-2b and the law of cosines to obtain the resultant MMF, 3
sr
B = _sr
o
2 +2 2 -20 cos(4.35)
ag o g g s r s r sr)Although the air-gap flux density is of concern, it is not the quantity that will be compared to the saturation flux density. The flux density that flows across the teeth of each lamination is the value that is desired. Both can be found by properly scaling (4.35). The flux is continuous across the boundary, therefore
B rO6L = B rOL (.6
st av t mach ag av st mach (4.36)
where B,, is the tooth flux density on the stator, 0, is the span of a stator tooth, and Os, is the stator slot pitch. Solving for the tooth flux density yields
B 0
B = ag t (4.37)
St 0
St
The rotor tooth flux density, B, is similar. It follows as B 0
B = ag r (4.38)
rt 0 rt
where 0, is the span of a rotor tooth and 0s, is the rotor slot pitch. The two quantities in (4.37) and (4.38) are monitored to determine whether the generator saturates.
4.5.4
Back-Iron Thickness
It is desirable to have the optimum thickness in the back-iron of both laminations. That is, it is desirable that the magnetic flux density is near saturation on the return path of the flux in the rotor and stator back iron. To find the optimum thickness, the flux in the back-iron is found first as the air gap flux integrated over one half pole. With the assumption of a sinusoidal air-gap flux density, the expression
7t
2
B
sin 6 rdO = B
T
(4.39)
ag sat
0
can be written to equate the air gap flux collected by a half pole to that which is present in the back iron. The back iron flux density is assumed to be at the saturation level of the core. Here, T is the desired core thickness for both the rotor and stator. Integrating and solving for T gives the optimum thickness
2B
r
T agav (4.40)
PB
satThis thickness is designed into the generator by adjusting Rin and Ro, after they have randomly designed.
4.6 Summary
This chapter presents assumptions and methods, by which the electrical parameters are calculated and by which the generator is analyzed for its electromechanical performance. The methodology will be recalled in Chapter 5, which discusses the results of several generator designs. This chapter only discusses the important parameters and does not model all of the quantities used. A full listing of the code used to design the generator is given in Appendices F and G.
5
Results
This chapter presents the generators designed by applying the methods discussed in Chapters 2, 3, and 4. The results are given for direct-drive and geared-drive generator configurations in which the geared-drive generator operates at twice the engine speed. The specifications that drive the design process are given first. This is followed by a table which presents the important
parameters for the optimum generators and a comparison of the two generator configurations. This chapter concludes with design and performance details.
5.1 Performance Specifications
The generators are analyzed at three different speeds: 600, 1500, and 6000 rpm. At each speed the generator is required to meet a specific output power requirement: 4000 W at 600 rpm, 3250 W at 1500 rpm, and 6000 W at 6000 rpm. In addition, the generator has to be efficient when generating the desired output power. The requirements only specify that the design be at least 75 percent efficient at 3250 W and 1500 rpm. However, in this thesis the efficiency at all speed points is computed for completeness. Since a thermal model is not used, a current density requirement is used as a replacement to ensure that the generator does not overheat. The stator and rotor current densities cannot exceed 2000 amperes per square centimeter.
Each generator is designed with the assumption of using an M-19 steel core. The flux through the teeth of both laminations must be less than the saturation flux density which is approximately 1.8 T. The air-gap spacing must be at least 0.635 mm, and it is allowed to range from this value to 10 times this value. The direct-drive and geared-drive generators must have a machine diameter no larger than 300 mm. The length of the direct-drive generator is allowed to vary from 0 to the value of the machine diameter. This restriction allows "pancake" generators, but for the geared-drive generator, pancakes are not allowed; it has a requirement on the aspect ratio, the ratio of the machine diameter to length may be no more than 2.
Knowing now the specifications for each generator design, a word must be added on how the design engine determines several parameters, most notably the number of armature turns. As mentioned in Chapter 4, the maximum number of armature turns can be found from the current density limit. The design engine then uses this value and, iteratively, counts down to the minimum value, which is one turn; fractional turns are not allowed. Once a value is found that keeps the magnetic flux density below its saturation value, the design engine then uses this number of turns to analyze the efficiency criteria. If the number of stator turns passes the efficiency requirement, then the generator can be considered an acceptable design, if not, the machine generator is discarded and the design engine returns to the beginning of the loop to begin the process again.
The determination of the total cost of the machine in this thesis depends only on the mass of steel and copper. The cost given here is simply a lower bound on the expected total cost of the generator. The specifications require that the cost of steel and copper be $0.45 per pound and $2.27 per pound, respectively. Other necessary parameters are mass densities; they are 7462 kilograms per cubic meter for steel and 8960 kilograms per cubic meter for copper.
The mechanical and electrical specifications are displayed in Table 5-1 and Table 5-2, respectively. A generator must meet these requirements if it is to be considered an acceptable design. Beyond this, the optimal generator is the one with the lowest cost.
5.2
Optimum Generators
The two types of generators, direct-drive and geared-drive are optimized here, meaning that they meet the mechanical and electrical specifications shown in Tables 5-1 and 5-2 and they are the lowest cost generators. The optimum generators are found by first running 3 million iterations for generators with varying numbers of poles. Here, generators with 8, 10, and 12 poles were all designed for direct-drive generators, as were 4, 6, 8 and 10 pole generators for the geared-drive configuration. This choice was made based on experience. The design space was then narrowed
and run for another million iterations for the number of poles that appeared to be optimal in that it provided the lowest cost. This exhaustive search method is done for both types of generators the detailed listings of the initialization scripts for all wide and narrow design runs are given in Appendix B.
Figures 5-1 and 5-2 compare the lowest cost generators for each number of poles after running the first million iterations for both the direct-drive and geared-drive generators. Also displayed is the lowest cost generator of each type after the refinement process. The figures follow a parabolic shape for each type as expected.
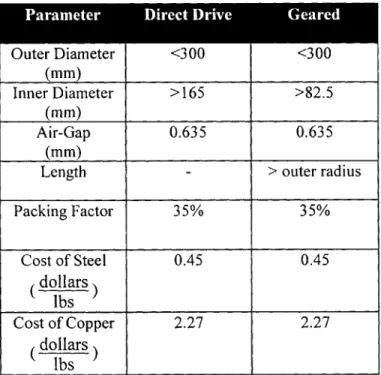
Outer Diameter (mm) <300 <300 Inner Diameter >165 >82.5 (mm) Air-Gap 0.635 0.635 (mm)
Length - > outer radius
Packing Factor 35% 35% Cost of Steel 0.45 0.45 dollars
lbs
Cost of Copper 2.27 2.27 dollarslbs
Table 5-1: The mechanical specifications that must be met by each generator design. Parameter Direct Drive Geared
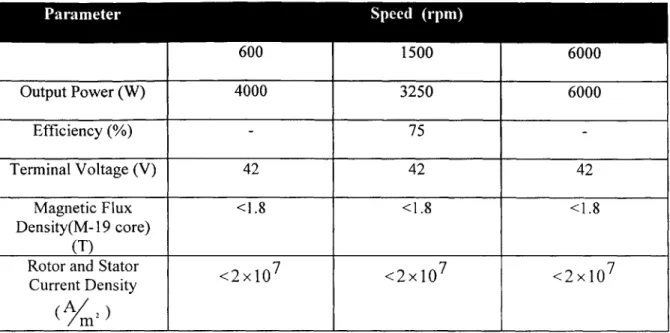
600 1500 6000 Output Power (W) 4000 3250 6000 Efficiency (%) - 75 -Terminal Voltage (V) 42 42 42 Magnetic Flux Density(M-19 core) (T) <1.8 <1.8 <1.8
Rotor and Stator <2x107 <2x107 <2x107 Current Density
(Am 2 ) I _ _ _ _ _ I _ _ _ _ _ I _ _ _ _ _
Table 5-2: The electrical specifications that must be met by each generator. The specifications are the same for the direct drive and geared generators, except the geared uses a multiple of the engine speed.
Total Cost vs Number of Poles
90 80 -0. -' -. - -- direct-drive 70 60 --- geared-0
o-50 240 - drecrefined
0 -30 -search 20 -~- refined 10 -search 0 2 4 6 8 1012 14 Number of Poles
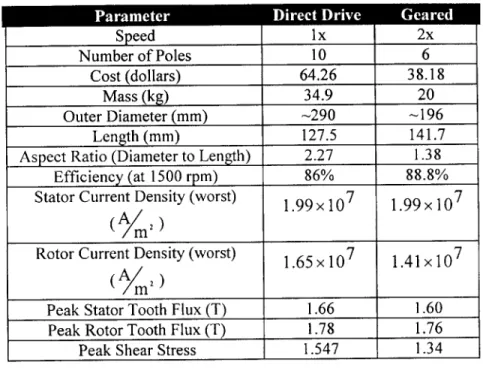
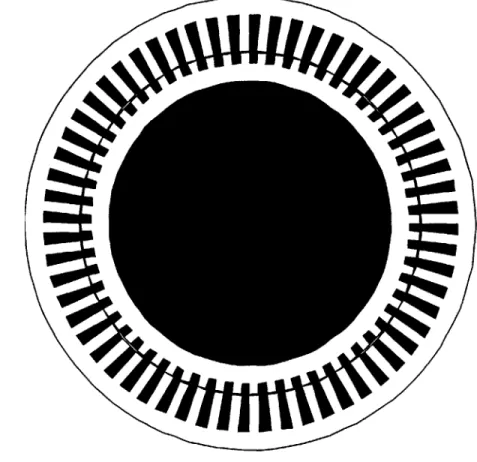
Several important parameters from the optimum generators of both types are shown in Table 5-3. The direct-drive generator is a 10-pole generator with 9 armature turns per slot. A 2-dimensional drawing is shown in figure 5-2a. A complete listing of generator characteristics is
given in Appendices K, L, and M.
Speed lx 2x Number of Poles 10 6 Cost (dollars) 64.26 38.18 Mass (kg) 34.9 20 Outer Diameter (mm) -290 -196 Length (mm) 127.5 141.7
Aspect Ratio (Diameter to Length) 2.27 1.38 Efficiency (at 1500 rpm) 86% 88.8%
Stator Current Density (worst) 1.99 X 10 1.99 x 107
( Am__2 )
Rotor Current Density (worst) 1.65 x 107 1.41 x 107
Peak Stator Tooth Flux (T) 1.66 1.60 Peak Rotor Tooth Flux (T) 1.78 1.76
Peak Shear Stress 1.547 1.34
Table 5-3: Comparison of results found for direct drive and geared type WFSM generators
The optimum direct-drive generator has 10 poles and 9 stator turns per slot. The physical appearance of the machine is reasonable. The generator was not fully optimized after the search was refined. All parameters are against the upper bound of their specified limits, except that of efficiency and the diameter. The efficiency could be made closer to the lower limit of 75 percent by decreasing the area of the rotor slots, for example, thereby increasing the rotor copper losses and decreasing the efficiency. However, the rotor current density will then increase and thus can
be tolerated until it violates the thermal constraints. Thus, the cost optimal generator will more nearly meet the efficiency specification.
The optimum geared-drive generators have 6 poles and 8 stator turns per slot. The generators were fully optimized after the search was refined. The physical appearance of the machine also reasonable, except that of the stator slots. In order to achieve the required output power, the design engine has chosen deep stator slots to allow the stator current density to float towards its upper bound. All other parameters are against the upper bound of their specified limit, except that of efficiency. The efficiency could be closer to the lower limit of 75 percent. Butjust like the direct drive, a manual optimization can be done. The rotor current density is not near its maximum, therefore further decreases in slot area can be tolerated until other specifications are violated.
5.3
Summary
Both types of generators are reasonable in terms of air-gap length, and stator and rotor slot make-up, more so the direct-drive generator. However, the direct-drive generator is a more expensive machine than the geared-drive generator. Since cost is the ultimate deciding factor, the direct drive generator probably is not the best type. A cost associated with gears is not included, but that cost is not likely more than 50% of the direct drive cost.
The geared generators have an advantage because they are much smaller machines, approximately 196 mm in diameter compared to 290 mm for the direct drive thus the geared generator would be much easier to fit inside an automobile. The smaller generator should result in a higher shear stress, but in this case it does not. The direct-drive generator has a shorter stack length, but not by enough to make it superior.
In all aspects except that of the mechanical dimensions and cost, the direct and geared drive generators are similar. From the automotive viewpoint, a small, inexpensive machine would be desirable. The geared generator meets this criterion.
Figure 5-2a: Direct Drive
Generator. The characteristics are
shown in Table
5-3.
column 2.
Figure 5-2b: Geared-drive generator. The characteristics are shown in Table
6
Summary, Conclusions & Suggestions for Future Work
The research presented in this thesis discusses a method to find the optimum WFSM generator for automotive applications. In Chapter 2, the characteristic design of the generator is discussed. It provides definitions for the design variables and the winding structure, and it discusses how the generator as designed here is different from a real model. In Chapter 3, the basics of the design engine are covered. It gives an overview of how an acceptable generator is found. Chapter 4 presents a detailed description of the derivation of the electrical parameters. It also discusses the analysis method. Results from running the design engine are given in Chapter 5. The
specifications for each generator are covered in addition to the optimum designs for both direct drive and geared type generators are covered and a comparison between the two types is given.
6.1 Conclusion
Both configurations of optimum generators, direct and geared drive, are highly efficient and relatively inexpensive. In fact, the geared-drive generators are significantly more efficient than the design specification because the thermal design limit imposed on the stator and rotor current densities demands enough copper to force high efficiency. Both generator configurations seem to favor deep stator slots, extra stator heating and lower field ampere-turns. But these are not
particularly troublesome except possibly for a solution for stator heat dissipation. Except for the problems of gearing, the geared type is more desirable for the automotive industry because of its cost and small package compared to that of the direct drive, approximately 38 dollars and 20 kg to 64 dollars and 35 kg. Given the results, a low-cost, highly-efficient and reasonably sized generator certainly appears feasible.
6.2 Suggestions For Future Work
Because of the high current densities in the optimal generators, a thermal model should be derived to provide a more accurate assessment of thermal performance. Also, the Lundell
generator, and perhaps another candidate generator, should be examined in a comparison the WFSM discussed here. The specifications should be the same and neither generator should use extensive power electronics, but a simple 3-phase rectifier as is used here. Lastly, the slots should be examined, more specifically, partially closed slots and skewing of the rotor slots, all of which prevents cogging should be designed. This might change a few dimensions but the overall performance and cost of the optimum generators should not change. Load-dump is another factor that should be considered given the high back emf voltage at high speed.
References
1. Afridi, K. A Methodology for the Design and Evaluation of Advanced Automotive Electrical Power Systems. MIT Thesis, 1996.
2. Correspondence with Dr. John Miller of Ford Motor Co. July 1998.
3. Gutt, H. and Muller, J. "New Aspects for Developing and Optimizing Modern Motorcar Generators. IEEE IAS, October 1994, Denver, CO.
4. Kuppers, Henneberger, and Ramesohl. "The Influence of the Number of Poles on the Output Performance of a Claw-Pole Generator." ICEM, September 1996.
5. Liang, F., Miller, J., and Zarei, S. "A Control Scheme to Maximize Output Power of a Synchronous Alternator in a Vehicle Electrical Power Generation System."
6. Mohan, B and Macke, E. "ElectroMagnetic Components in Dual Voltage Systems."
7. Naidu, M., Boules, N., and Henry, R. "A High Efficiency High Power Generation
System for Automobiles." IEEE Transactions on Industry Applications, vol. 33, No. 6, November/December 1997.
Appendix A.
Start-up, gendesign.m
%script runs the alternator design program.
init; %makes call to init script
while desno <= n, %establishes loop management fprintf('\nBeginning Design Number %d\n',desno)
rng; %generates random numbers
sdim; assiqns random numbers to synthesizedvr cdim; %caicuiates remaining dimensions
lumpparam; ealculas lumped pa ramete a f:1ro di mensio
perf;
cost; tevaluate cost
check; saves bs.a nd lest: cst mach nes
desno=desno+l;
fprintf('\nCost = %g,Best Cost=%g\npoles=%g\n',tcost,min(savetc), 2*pp);
ri f ( ' \ncount e g , couter if saveef-=2, [rout;rbs;rsin;rrout;rbr;tthang;rtthang;L] eyn e imen end end
Appendix B. 1 Direct-Drive Initialization Script, init.m
The following is the script, init.m. It's in its MATLAB form. The percent signs means that the code is commented out. This is the version of the initialization before the refinement
initialize cnstants to be used trsSIogout
n=le6; %nuber of design iterations
rouLtmax=.15;
emaximur
alternator radius in m for drro ut1i-r 1.5 !nimum .altrnator radius C inm for de driv ..rinmnin=8.25e-2; :sminf inner radius for direct drive
desno=1; :tses des igr no
s 60 1500 6000 ; speed in rpm for direct P=[4000,3000,6000]; pp=4; spb=2; sp=6; gmin=0 .33e-3; pf=0.35; cs=0.45; cc=2.27; csm=cs*2.205; ccm=cc*2.205; sigmac=4.45e7; sd=7462; cd=8960; Nap=2; Nf=6; muzero=4*pi*10^ (-7); V1=42; Bgsat=1.8; Jmax=2e7; Jrmax=2e7; Vd=1; counter=0;
esltspe phaso bel
1
mniumr[ J ar -g ap length (m) spakin fact or
dollars per nound--cost for steel %doll rs pe kg -- tee1( etric
0' r''
-t-e .
akg per m''3--c-ppeper m'- -see nk
nUmr z f slot
ton
pe phSe.rmtu.Appendix B.2 Geared-Drive Initialization script, init.m
The following is the script, init.m. It's in its MATLAB form. The percent signs means that the code is commented out. This is the version of the initialization before the refinement.
in. it iize cons tantCs to b~~eused th roug~hout
n=le6; number of desi n. teratio s
routmax=.0825; maximm ateriato r radius i (m) for geared rive troutin=.22e-2;
eminimum
a.te~~rnator radius inm m fo~r gearea drLv rinmin=4.125e-2; innier radius (m) for geare drivedesno=1; design 4sets no
speed=2.*[600,1500,6000]; rm o e P= [4000, 3000,6000]; pp=3; spb=2; sp=6; gmin=0.33e-3; pf=0.35; cs=0.45; cc=2.27; csm=cs*2. 205; ccm=cc*2. 205; sigmac=4.45e7; sd=7462; cd=8960; Nap=2; Nf=6; spl pairsF-is slOts pr pol mi iu i - a e g h m spakin.fato JkJ per I): 1 - pe
.
muzero=4*pi*10^(-7); V1=42; Bgsat=1.8; Jmax=2e7; Jrmax=2e7; Vd=1; counter=0; per g-opr(e c ity in m fr coppero turrns per lt phase (armaturt
spereabiity
f fee sp~ace nurr t ds l in A/m'2
%counts the number of machines
A/'I