CFD Based Design of a High Speed Planing Hull with
Cambered Planing Surface, V-Step and Hydrofoil
by
Calley Dawn Gray
Submitted to the Department of Mechanical Engineering
in partial fulfillment of the requirements for the degrees of
Master of Science in Mechanical Engineering
MASSACHUSElTS INSTITUTE OF TECHNOLOGY
JUL 3
0
2015
LIBRARIES
ARC-WE
and
Master of Science in Naval Architecture and Marine Engineering
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
June 2015
Massachusetts Institute of Technology 2015. All rights reserved.
A uthor ...
SI
Certified by ...
Signature redacted
Department of Mechanica Engineering
7 2
May 8, 2015
ignature redacted
Dr. Stefano Brizzolara
Research Scientist and Lecturer
The sSpervisor
Signature redacted
Accepted by...
Dr. David E. Hardt
Chairman Committee on Graduate Students
CFD Based Design of a High Speed Planing Hull with Cambered
Planing Surface, V-Step and Hydrofoil
by
Calley Dawn Gray
Submitted to the Department of Mechanical Engineering on May 8, 2015, in partial fulfillment of the
requirements for the degrees of Master of Science in Mechanical Engineering
and
Master of Science in Naval Architecture and Marine Engineering
Abstract
With emerging applications for high speed boats in commercial, military and off shore in-dustries, there is a focus in the naval architecture community to improve the efficiency and performance characteristics of planing hulls. In the 1960's, Eugene Clement showed that considerable reductions in resistance at high speeds can be obtained by converting a con-ventional planing hull to a Dynaplane stepped planing hull. A Dynaplane stepped planing hull refers to a hull configuration where the majority of lift is provided by a swept back cam-bered surface, while the remainder of the lift is provided by an aft lifting surface that also provides trim control and stability. The afterbody is fully ventilated by use of a V-shaped step positioned at the trailing edge of the cambered surface. Clement's semi-empirical conversion method was based off tests performed at the David Taylor Model Basin and is limited to boats with a deadrise of less than 15'. Since the publication of his paper, advance-ments in CFD programs have made it possible to conduct accurate simulations of planing hulls with complex geometry, allowing for further development of Clement's method. This thesis expands Clement's method to high deadrise by applying it to a notional version of the Mark V Special Operations Craft used by the United States Navy with a design speed of 55kts. CFD simulations with fixed trim were run in order to refine the cambered surface, design the step and afterbody, to position the hydrofoil and to test the low speed perfor-mance of the interceptor. Once the hull design was finalized, simulations with two degrees of freedom were run to assess the dynamic stability of the hull. Through simulations, it was found that the configuration is dynamically stable and is able to reduce hull resistance
at design speed by as much as 54% when compared with that of the original hull.
Thesis Supervisor: Dr. Stefano Brizzolara Title: Research Scientist and Lecturer
Acknowledgments
First and foremost, I would like to thank my thesis advisor, Professor Stefano Brizzolara for his patient guidance, encouragement and advice. I have been extremely lucky to have had an advisor that cared so much about my work and responded quickly to all my questions. It has been an honour to work with him and benefit from his technical expertise on planing hulls and ship design.
I am indebted to the other members of the Innovative Ship Design Lab for all their
contributing efforts in the research of planing hull design and hydrofoils. Specifically, I would like to thank Luca Bonfiglio for his guidance with LaTex and Matthew Williams for his help with Star CCM+.
I am grateful to Captain Mark Thomas, Captain Joe Harbour, Commander Jarod Ketcham
and Commander Weston Gray, for sharing their practical expertise and teaching the stu-dents of the 2N Program about naval ship design. I have been so thankful for their men-torship throughout my time at MIT. In addition, I would like to thank the Royal Canadian Navy for funding my graduate studies.
Last, by not least, I would like to thank my family and friends for their love, support and encouragement during my studies. Thank you for keeping me focused when I needed to work hard, and for providing me with an escape when I needed a break.
Contents
1
Introduction
13
1.1 Motivation. . . . . 13
1.2 T heory . . . . 15
1.2.1 Displacement vs. Planing Hulls . . . . 15
1.2.2 Design Features of a Planing Hull . . . . 17
1.2.3 Testing Methodologies . . . . 21
2 Design Procedure 23 2.1 Hull Selection . . . . 24
2.2 Cambered Surface Design . . . . 25
2.2.1 Calculation of Cambered Surface . . . . 26
2.2.2 Integration of the Cambered Surface with the Parent Hull . . . . 35
2.3 Star CCM+ Setup . . . 36
2.4 Design of the Afterbody . . . . 37
2.5 Addition of the Hydrofoil . . . 40
2.6 Interceptor . . . . 43
2.7 Preparing Rhino Model for Model Construction . . . . 44
2.7.1 Design of Spray Rails . . . 44
2.7.2 Modelling the Interceptor . . . . 45
2.7.3 Modelling the Support Platform for the Pivot . . . 47
3 Results 49 3.1 Cambered Surface Design . . . . 50
3.1.1
Validation of Clement's Method for High Deadrise Ships . . . 50
3.1.2
Effect of Change in Draft . . . 51
3.1.3
Effect of Change in Trim . . . 53
3.1.4
Modification to Camber . . . 53
3.2
Placement of Hydrofoil . . . 54
3.3
Prediction of Dynamic Stability . . . 57
3.4 Two Degrees of Freedom Simulations . . . 60
3.5
Incorporation of the Interceptor . . . 63
4 Conclusion
69
4.1
Summary . . . .. . . . 69
List of Figures
1-1 Relative Calm Water Performance of Significant Modern Motor Yachts and
N aval Vessels [4] . . . . 16
1-2 General Guidelines for Different Speed Regimes [4] . . . . 17
1-3 Model Resistance/Weight Ratio vs Speed Coefficient for Stepped and
Un-stepped Planing Hulls [12] . . . . 18
1-4 Free Surface Around Unstepped and Dynaplane Hulls- Bottom View [8] . . 19
1-5 Boundary Layer Flow Past an Interceptor with Adjustable Height h [6] . . . 20
2-1 Parent Hullform Particulars . . . . 25
2-2 Parent Hullform-Side View . . . . 25
2-3 Parent Hullform-Front View . . . . 25
2-4 Approximate Relationship Between Deadrise Angle and Design Angle of
Attack for a Cambered Planing Surface . . . . 27
2-5 Cambered Planing Surfaces- Corrections for Sweepback Angle (0) to Lift
and L aD L...3 . 30
2-6 Lift/Drag versus CLbo(exp) for Rectangular Planing Surfaces Having the
Johnson Three-Term Section and Zero Deadrise, Re = 107, AR=2 . . . . . 31
2-7 Location of Center of Pressure versus CLbo(exp) for Rectangular Planing
Surfaces Having the Johnson Three-Term Section and Zero Deadrise . . . . 32
2-8 Plan View of the Planing Surface, with Construction Lines for Determining
the Location and Length of the Mean Hydrodynamic Chord (M.H.C) . . . . 33
2-9 CL,d versus Design Trim Angle for Rectangular Planing Surfaces Having
Dimensionless Offsets of Johnson Three-Term Camber Curve . . . .
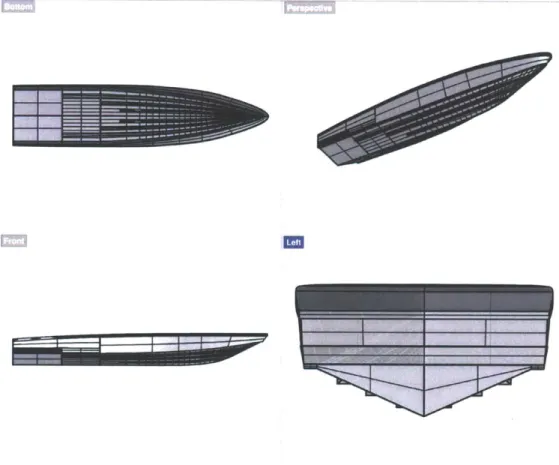
Top, Perspective, Front and Left Views of the Parent Hull . . . .
Top, Perspective, Front and Left Views of the Cambered Planing Surface
2-10
2-11
2-12
2-13
2-14
2-152-16
2-17
2-18
2-19
2-20
2-21
2-22 2-23 2-242-25
2-26 2-27 2-28 2-29 2-30 2-31 2-32 3-1 3-2 3-3of
35
36
Integrated with the Parent Hullform . . . .
Scene of Fluid Domain and Meshing . . . .
Back View of the Step . . . .
Back View of the Free Surface . . . .
Top View of the Free Surface . . . .
Perspective Views of the Afterbody and Step . . . . .
Perspective Views of the Boat in Worst Case Scenario
Position of Hydrofoils on Previous Thesis . . . .
Surface Piercing Hydrofoil . . . .
Side View of Interceptor . . . .
Perspective View of Bevelled Interceptor . . . .
Bottom View of Original Spray Rails on Original Hull
Bottom View of New Spray Rails on Converted Hull
Interceptor Device as Proposed by USNA . . . .
4/16" Gap Intended to House Interceptor . . . .
View of the Interceptor from the Inside of the Hull
View of the Interceptor from the Outside of the Hull .
Perspective View of the Interceptor Housing . . . . .
Tow Post Pivot . . . .
Side View of the Interceptor Housing, Center of Gravity and Pivot Support.
Perspective View of the Interceptor Housing, Center of Gravity and Pivot
Support. ...
Pressure Coefficient of Water over Clement's Predicted Planing Surface . .
Volume of Fluid Diagram over Clement's Predicted Planing Surface
. .
. .
Effect of Change in Draft on Pressure Coefficient and VoF Diagrams
. .
. .
48
48
50
50
52. . . 37
. . . 38
. . . 39
. . . . 39. . . 40
. . . 41
2 degrees Pitch . . 41. . . 42
. . . 42
. . . 43
. . . 43
. . . 45
. . . 45
. . . 46
. . . 46
. . . 46
. . . 47
. . . 47
. . . 47
3-4 Table of Effect of Change in Draft on Forces and Pitching Moment for the
H alf M odel . . . .
3-5 Effect of Change in Trim on Pressure Coefficient and VoF Diagrams . . . .
3-6 Table of Effect of Change in Trim on Forces and Pitching Moment for the
H alf M odel . . . .
3-7 Effect of Change in Trim on Pressure Coefficient and VoF Diagrams for
M odified Camber . . . .
3-8 Table of Effect of Change in Trim on Forces and Moment for Modified
Camber . . . . 5 5 3-9 3-10 3-11 3-12 3-13
Pressure Coefficient Diagram for the Modified Planing Surface .
Volume of Fluid Diagram for the Modified Planing Surface . . .
Volume Fraction of Water Diagram of Full Ship with Hydrofoil .
Volume Fraction of Water Diagram of Hydrofoil-Side View . . .
Volume Fraction of Water Diagram of Hydrofoil-Top View . . .
3-14 Depiction of Two Sections Analysed . . . .
3-15 Pitching Moment vs Trim Angle . . . .
3-16 Lifting Force vs Trim Angle . . . . 3-17 Submerged Length of Hydrofoil vs Trim Angle .
3-18 Trim Monitor Plot . . . .
3-19 Bottom view of Free Surface . . . .
3-20 Table of Lift Data for the Half Model . . . .
3-21 Drag Comparison of Dynaplane with Parent Hull
3-22 Trim Monitor Plot for Hull Without Interceptor
3-23 Trim Monitor Plot for Hull With Interceptor . . .
. . . . 55 . . . . 56 . . . . 56 . . . . 57 . . . 57 . . . 58 . . . 58 . . . 59 . . . 60 . . . 60 . . . 61 . . . 61 . . . 62 . . . 64 . . . 64 3-24 Bottom View: Pressure Coefficient Over Cambered Surface With Interceptor
3-25 Bottom View: Pressure Coefficient Over Cambered Surface Without
Inter-ceptor . . . .
3-26 Pressure Coefficient Distribution Over Cambered Surface at 0.02m from
C enterline . . . . 53 54 54 55 65 65 66
3-27 Pressure Coefficient Distribution Over Cambered Surface at 0.1m from
Centerline . . . 66
3-28 Pressure Coefficient Distribution Over Flat of Chine at 0.165m from
Cen-terline . . . 66
4-1
Top View of New Interceptor Design (Top) Compared With Old Interceptor
Design (Bottom) . . . 71
4-2
Back View of New Interceptor Design (Left) Compared With Old
Chapter 1
Introduction
1.1 Motivation
The ever-increasing demand for additional speed in ships has expanded the interest in ves-sels having a portion of their weight supported by dynamic forces [5]. High speed ma-rine craft have applications in the military, coast guard, recreational boating and offshore industries[18]. Modifications to traditional hull designs, additions of appendages and the development of low weight/high powered engines have all resulted in increases in perfor-mance and efficiency of high speed ships. Besides the operational gains, an efficiently designed ship will also require less horsepower to achieve design speed. Therefore, ad-ditional cost savings and positive environmental impacts can be achieved by improving
efficiency of ships.
This paper explores improvements that can be made to the hullform of a high speed ship. Starting from Eugene Clement's method of converting a prismatic hull to a Dynaplane, this thesis aims to extend it and show that hull resistance can be decreased by using a swept back stepped hull with a cambered planing surface, a fully ventilated afterbody, a surface piercing hydrofoil and an inceptor. The purposes of the thesis can be broken down into the list below:
1. Extend Clement's method for high deadrise hulls: Eugene Clement provides the only
systematic approach to optimize the design of a swept back stepped planing hull[8].
His semi-empirical method was derived from tests performed at the Taylor Model
Basin in which he showed that a Dynaplane configuration can result in significant
resistance savings. However, Clement's design procedure is based on a given range
of hull parameters. Clement specified that his procedure was only valid for low
deadrise ships and cautioned that his method should not be applied to ships with a
deadrise greater than 150
[12].
The baseline ship used for this thesis has a deadrise
of 22.090. This thesis attempts to prove that Clement's method, when opportunely
revised, can be applied to a wider range of hull parameters.
2. Show that a Dynaplane configuration can reduce resistance at high speeds: Clement's
method, when revised and complemented by means of targeted CFD simulations,
will be used to convert an existing high speed ship to a Dynaplane configuration.
The United States Naval Academy assisted in the selection of the baseline ship and
provided resistance data for the baseline hull at its full scale design speed of
55
kts.
This resistance data will be compared to the resistance data collected from
simula-tions in Star CCM+ that mimic the testing condisimula-tions used for the baseline ship. It
is expected that the conversion will result in resistance savings. However, the
base-line ship is already designed to be efficient at high speeds, so it will be interesting to
observe the amount of resultant resistance savings.
3. Devise a dynamically stable design in calm water: The converted ship will be tested
using CFD analysis in Star CCM+ to evaluate its dynamic stability in calm water
through a range of speeds. Simulations will be run for Volume Froude numbers
ranging from
3.5
to
5.5
in order to assess the ship's stability at lower speeds, as well
as at design speed. The simulations will allow for two degrees of freedom, in that
the ship will be free to heave and pitch. The trim monitor will be used to determine
if the ship is able to achieve steady state.
Once a suitable design is developed, a model will be constructed. The intent is to
conduct further testing of the model at the United States Naval Academy Hydromechanics
Laboratory.
1.2
Theory
Before explaining the design procedure, theory concerning planing hulls must be discussed. This theory will provide the background necessary to understand the design decisions and the testing methodology.
1.2.1 Displacement vs. Planing Hulls
The traditional form of a hull is a displacement hull, which is characterized by a rounded bilge. Its buoyancy, or lift, is generated by the amount of water it displaces and it moves by pushing its way through the water. Wave-making resistance, resulting from the formation of a bow wave, is the dominant form of drag for displacement hulls. As the speed of the vessel increases, the length, height and speed of the generated bow wave increase as well. This wave-making resistance increases exponentially until the wavelength of the bow wave is equal to the waterline length of the ship. This occurs at a speed-length ratio (speed in knots divided by square root of length in feet) of approximately 1.34 [3]. At this point, the ship will be trapped climbing the trough of its own large bow wave. The negative pressures generated by the rounded bilge shape result in a virtual barrier to speed increase [16].
Conversely, planing hulls are designed to overcome displacement hull speed by skim-ming across the surface of the water. At low speeds, wave-making resistance is still the dominant form of drag, however, planing hulls are designed to generate hydrodynamic lift forces proportional to the speed of the vessel. The total lift felt by the hull is a combination of the hydrodynamic lift, caused by the water passing over the planing surface, and hydro-static lift, which is a function of the underwater volume of the hull. At low speeds, planing hulls are primarily supported by buoyant, hydrostatic forces. As speed increases, hydrody-namic lift is generated and hydrostatic forces acting on the hull gradually decrease. As the ship transitions into the planing regime, it "rises above its static flotation level and trims up by the bow, thereby reducing the wetted surface significantly" [17]. Hydrodynamic lift
continues to increase until the hydrostatic force felt by the hull is negligible, and the ship
is fully planing.
Figure 1-1 illustrates the relationship between resistance and speed for four hulls of equal displacement: two displacement hulls (round bilges) and two planing hulls (hard chines). At low speeds, the displacement hulls have less resistance than the planing hulls. However, the resistance of the displacement hulls increases exponentially with the Froude number. At around Froude number 1.10, the resistance of the planing hulls is approximately equal to that of the displacement hulls. After this point, the planing hulls show far less resistance than the displacement hulls. It is clear from this graph that planing hulls should be considered for high-speed operations.
MIt ITARY LOA Max CVN-77 (BUSH) 333.0 0.40 L CS-1 11. 0.74 MK- PB ;i i --- HA 0.57ROUND BILGE 1.27 PLAN SPE 0 50 0 75 100 1.25 FnL ARD C ING 1 EDS 1 50 (--- --- -4668-13 -- -4669-8 ... 100 B . - 100Z 2013 175 200 225
Figure 1-1: Relative Calm Water Performance of Significant Modern Motor Yachts and Naval Vessels [4]
For planing hulls, there is no set speed or dimensionless coefficient that predicts when ship transitions from the displacement regime, where hydrostatic forces dominate, to planing regime, where hydrodynamic forces dominate. The transition is gradual and is
1.62 0.84 YACHTS Ermis, Lazy Me For-una Predatr Silver Destriero LOA m 37.5 41.0 46.0 73.0 73.-68. 0 175 0 150 0.125 0 100 0.075 0.050
I
I DISPLACEMENTI SPEEDS I I-( 0 - V W 0 2 0 25 0025 F-0.000 L-0 L-0L-0 the the flNE I Thighly dependent on hull geometry and loading. Figure 1-2 shows how determination of
speed regimes can change with hull loading, however, it should be noted that it does not take into account variations in hull geometry.
3 200 100 70 50 30 20 0 5 3 2 1 5 10 L for LIV = 20 6.0 30 50 80 100 150 m h F 3.0 F 0.65 F, 040 1 10 100 1,000 10,000 100,000 1,000,000 ft 0 1 10 10 100 1000 1000 m V
Figure 1-2: General Guidelines for Different Speed Regimes[4]
It is interesting to note from Figure 1-2, that Froude number (FlL) was used to define
speed regimes at lower speeds and that Volume Froude number (Fnv or Fv) was used to
define the beginning of the planing regime. At planing speeds, wave-making resistance is no longer significant and therefore, the Volume Froude number is a more meaningful way to describe the performance of planing craft[ 12]. Volume Froude is given by the following
formula where W is displacement in lbs and VK is the vessel speed in knots:
F~ .595 )VK (1.1)
1.2.2
Design Features of a Planing Hull
There are many considerations that go into the design of a planing hull. A naval architect must create a hullform that is able to efficiently meet design speed, while balancing other
-V I I
-
-:
~
~~1
__G_
user requirements such as seakeeping, available re-arrangeable area, fuel consumption and pollution effects. The employment of a stepped hull, spray rails, interceptors, hydrofoils, and innovative planing surfaces have all contributed to improvements in planing ship per-formance.
A stepped hull is considered an essential feature in any planing hull design because
of it's proven drag reduction at high speeds. The inclusion of a step forces the separation of water flow over the aft hull. It facilitates afterbody ventilation by allowing air to be sucked into the channel created by the step, from the opening above the free surface at the chines [8]. Since a large portion of the afterbody remains dry, there is a considerable reduction in wetted surface area and hence water resistance. Also, since less material is used to construct the hull, a stepped hull will be lighter than an unstepped hull with similar hullform characteristics. Figure 1-3 compares the resistance/weight ratios of two stepped hulls to two unstepped hulls at varying Volume Froude numbers. As shown in Fig 1-2, planing boats tend operate at Volume Froude numbers of 3 and above. At these speed coefficients, the hull drag (at equal weight) for the stepped hull is significantly better than the unstepped hull.
Model N.27.Drs-22 de 4 44
o.3 - DTM33 Ser 62, Mode No 4667-1
* ad"is N Nde.
-D
oSe Tno elNo . 46-A
Fixed~ Dedi
~ ~
~
Uneboy d.5dgFigure 1-3: Model Resistance/Weight Ratio vs Speed Coefficient for Stepped and Un-stepped Planing Hulls [12]
There are many different types of stepped boat configurations including single step, multi step, catamaran, canard and V-stepped [12]. Studies preformed by Eugene Clement suggest that a Dynaplane, which uses a transverse V-stepped hull, offers superior perfor-mance by optimizing the shape of the lifting surface and reducing wetting surface area. Dynaplane refers to a configuration where approximately 90% of the lift is generated by a V-shaped cambered planing surface, while the remaining 10% of the lift is provided by a lifting surface at the transom, intended for trim control and stability. Clement introduced a semi-empirical method, based off experimental tow tank tests made at the David Taylor Model Basin, to design a planing surface that resembles a swept planar trapezoidal wing of an airplane[8]. The resulting planing surface increases hydrodynamic lift, reduces hull drag and minimizes wetted surface area at high speeds. Fig 1-3 compares the performance
of DTMB Model 5115 (a Dynaplane planing boat) to the Swedish Tank Model No. 468-A
with a single step. From the figure, one can see that at high speeds, the Dynaplane config-uration results in reduced resistance for ships of equal weight. Fig 1-4 compares the free surface of an unstepped planing hull to that of a Dynaplane from the bottom view. You can see that there is a significant amount of reduced wetted surface area.
Unstepped Hull Dynaplane Hull
Figure 1-4: Free Surface Around Unstepped and Dynaplane Hulls- Bottom View [8]
Hydrofoils and interceptors are examples of lifting surface appendages that can be used in conjunction with a cambered planing surface to increase stability and decrease resistance.
A hydrofoil can be used as the aft lifting surface, supporting 10% of the ship's weight. Its
cross section is cambered, resembling that of an airfoil. As speed is increased, the lift generated by the hydrofoil helps lift the hull out of the water, thereby decreasing wetted surface area and drag. Interceptors are useful in helping decrease the drag experienced by a planing hull at low speeds. Fig 1-3 showed that stepped hulls exhibit increased resistance
at low speeds. Interceptors consist of an adjustable flat plate with a beveled end that can be lowered vertically at low speeds. They serve to increase the dynamic pressure on the bottom surface upstream, and hence create a dynamic force normal to the surface. At Froude numbers greater than 0.4, the presence of the interceptor causes a pressure peak at the plate. This results in separation of the boundary layer from the hull and allows ventilation aft of the interceptor [14]. The additional drag created by the interceptor is negligible, however, the moment generated results in additional lift and also reduces the trim angle of the ship. Figure 1-5 shows the boundary layer flow past the interceptor, the high pressure area created at its interception to the hull and the hollow left aft of the plate. Most often it is positioned on the transom and is used for trim control and stability. However, it can also be used on the trailing edge of the planing surface in order to increase the size of the planing surface. On newer planing hulls, an integrated control system automatically raises and lowers the interceptor depending on the speed of the vessel.
N~h
Figure 1-5: Boundary Layer Flow Past an Interceptor with Adjustable Height h [6]
Early planing hulls were designed for efficiency at high speeds in calm waters. Modern planing hulls, however, are designed to balance the requirements of seakeeping and speed. In order to perform well in waves, the hullform must minimize hull slamming and allow for flow separation at the step and the sides[4]. This prevents negative pressures areas on the bottom of the hull. In the past, high speed V-bottom boats with low deadrise were used because the shape of the hull provides good flow separation and lift. However, these boats can not be used for offshore operations due to their poor seakeeping and hull slamming. Deep V hulls are now the hullform of choice in waves. Although they are not as efficient in
calm water, the high deadrise at the bow reduces hull slamming and rough water resistance at high speeds. Longitudinal spray rails and hard chines are typically used in conjunction with deep V planing hulls to facilitate the flow separation [17]. When positioned properly, spray rails help separate the flow of water at the boundaries of the planing surface. A hard chine can also help with flow separation at the side. A hard chine refers to a sharp angle in the hull where the hull bottom meets the topside. The flat of chine refers to a wide flat areas on either side of the hull before the chine. The sharp angle in the hull reduces drag
by directing spray out the sides and preventing water from rising up the hull sides. The flat
of chine also helps generate lift while the ship is moving.
1.2.3
Testing Methodologies
In the past, it was necessary to build a full-scale ship in order to verify its functionality. This was time consuming and expensive. In the 1860's, William Froude showed that small-scale tests could be used to predict the behaviour of full-sized hulls. This ushered in an era of tow tank testing of model hulls [15]. In recent years, advancements in CFD software have allowed for CFD to transition from a research tool, to a design tool naval architects can use for a final design.
Although CFD analysis is a well established tool for displacement ship design, it is particularly difficult to predict the hydrodynamic characteristics of high speed planing hulls due to the complex shape of the hull which causes its viscous and pressure components to be non-linearly related to the dynamic lift and trim moments [9]. Therefore, naval architects commonly use semi-empirical methods based of series of large scale systematic tow tank tests. Predictions on the hydrodynamic characteristics of planing hulls are drawn from these tests and are able to be applied to planing hulls with simple geometry.
In recent years, with the expanding applications of planing hulls, naval architects have made great advances to improve the accuracy of CFD analysis. Studies performed by Brizzolara have shown that CFD analysis can be used to predict the hydrodynamic char-acteristics of a planing hull with complex geometry with the same level of accuracy as
using model hulls [10][7]. "Results obtained, in terms of drag/lift forces and longitudinal
trimming moments, are compared with available experimental model tests made at
Hydro-nautics towing tanks and the semi-empirical theories of Savitsky, Shuford, etc. commonly
used by naval architects for the prediction of planing surface hydrodynamic performance"
[9]. Thus, CFD analysis is a faster and more affordable alternative to model testing.
CFD software allows the user to model a real world environment computationally, by
allowing the user to create a virtual tow tank. The MIT iShip Laboratory uses Star CCM+
for CFD analysis. A discretized fluid domain is first created with user-defined
bound-ary conditions. The unsteady Reynolds-Averaged Navier-Stokes Equations (RANSE) are
solved in each cell, for each time step and data is passed between cells to ensure
conti-nuity [19]. Boundaries that define the size of the virtual tow tank are created and given
initial conditions so that a fluid inlet, pressure outlet and symmetry planes are assigned.
The virtual tow tank model is designed to split the boat in half longitudinally, exploiting
the symmetry condition, in order to be computationally less expensive. Star CCM+ uses a
Volume of Fluid (VOF) multiphase model to allow for the two immiscible fluids and derive
the interface between the two. Two fluids are defined (air and water) and their properties
are input automatically into the program. Volume Fraction value is used to define the
spa-tial distribution between the fluids so that it is easy to read the fraction of water contained
in a cell.
An STL, STEP or IGES model must be imported into Star CCM+ as a basis for defining
the shape of the hull. The model is then re-meshed in CFD to create cells that serve as the
boundary of the hullform [19]. A mesh is also created when the fluid domain is defined.
Defining the proper mesh density for the simulation is extremely important as it allows the
user to accurately determine the fluid interaction between cells. If the meshing is too dense,
the user will have needlessly created more cells, making the simulation more
computation-ally expensive and slower. Mesh density is a function of the velocity of the fluid flow and
the time step (the time it takes for the fluid to pass through one cell). The mesh should be
refined around the hull in order to create a boundary layer, on the free surface to monitor
the shape of the resulting wake and over the lifting surfaces due to their precise geometry.
Chapter 2
Design Procedure
The design of the high speed planing hull was a multi-step, iterative process. A parent hullform was first chosen and then converted in stages by integrating a cambered planing surface, V-Step and Hydrofoil to the original hull. Clement's method was used to obtain a first design of the cambered surface, which was integrated to the parent hullform and imported into Star CCM+ for simulation purposes. Each successive feature of the design was driven by the results of fixed trim CFD simulations. The original bow of the parent hull was left untouched, however, everything aft of the cambered surface was redesigned. Simulations were used to refine the cambered surface and adjust the design trim angle. The wake generated by the final cambered surface was referenced in order to construct the step and afterbody. A surface piercing hydrofoil was added slightly aft of the transom and simulations were used to adjust its vertical position. Once a completed design was establish, more complex simulations with two degrees of freedom were run to assess the dynamic stability of the vessel at both low speeds and at design speed. An interceptor was then incorporated to the design to decrease resistance at low speeds. The last part of the design process saw minor amendments added to the Rhino model so that a foam model could be constructed for tow tank testing.
2.1 Hull Selection
The parent hullform was chosen based on recommendations from the United States Naval
Academy (USNA) meant to address stability issues with an earlier iShip Dynaplane design.
Leon Faison, a previous graduate student, had chosen a parent hullform named Model 5631
from the David Taylor Model Basin (DTMB) database to convert to a Dynaplane [13]. This
design had a deeply submerged and relatively full bow, which created a dynamic suction
force when submerged at high speed. As a result, the ship would pitch bow down when
going into a wave. The radius of curvature at the stem of the newly suggested parent
hullform is very small, therefore, it is anticipated that it will develop less suction force at
the bow.
The new parent hullform is based off the British Belle and is a notional version of the
Mark V Special Operations Craft used by the United States Navy. It is a deep V hull with a
deadrise of 22.090 at midship. It has three longitudinal spray rails, a flat transom, constant
deadrise aft of midships and a significant flat of chine [1].
The USNA has used this model in their stepped-hull high speed model boat tests.
Dur-ing these tests, different step configurations were tested usDur-ing various trim control
tech-niques. It was found that the presence of a step will reduce drag but result in increased
vertical accelerations felt by the crew as a result of a larger trim angle. Useful to this
re-port, is the baseline resistance data collected for the original hull at 55kts, because it gives a
point of reference with which to compare the converted high speed planing hull. Resistance
data is given for the original hull with a trim angle of 5.2' and for the original hull along
with trim tabs that limited the trim angle to 2.50 at 55 kts.
The parameters of the full scale parent hull are given in Figure 2-1. The model is scaled
down from the full scale hull by a factor of 10 (X
=
10). The front and sides views are
shown in Figure 2-2 and Figure 2-3. The dimensions for the model in Rhino are given in
feet.
Characteristics Parent Hullform
Displacement
42810 lbs
Chine Beam
11.86 ft
Deadrise
22.09 deg
LCG fwd of AP
16.11 ft
Design Speed
55 kts
Figure 2-1: Parent Hullform Particulars
Figure 2-2: Parent Hullform-Side View
1.20
Figure 2-3: Parent Hullform-Front View
2.2
Cambered Surface Design
Eugene Clement's 24 step method was used to obtain a first design of the cambered planing surface. Before embarking on this conversion it was understood that the application of Clement's method was limited to low deadrise ships (i.e. having a deadrise of less than
150). The intent was to find a possible broader application of the method by evaluating
its validity with a high deadrise hullform. Clement's method uses the hull parameters and design conditions to determine the boundaries and location of the cambered surface,
before using the Johnson Three Term Equation to determine the required camber. Once the
dimensions of the cambered surface were calculated, the surface was built in Rhino and
integrated to the parent hullform.
2.2.1
Calculation of Cambered Surface
The following steps were taken to calculate the dimensions of the cambered surface.
In order to determine the non dimensional Volume Froude number, the displacement
and design speed were used.
S.595
(
Fv = VK (2.1) WI=
59
) 55kts
(2.2)
- 428101bs6=5.5
(2.3)
The non-dimensional lift coefficient of a deadrise planing surface is given by the
fol-lowing formula where b is the chine beam, p is the density of salt water and v is the design
speed in ft/s.
.9W
CLbP .5pv2b2 (2.4).9
x 428 l0lbs
(2.5)
.5 x 1.936slugs
x (92.62ft)2 x(1.86ft)2
ft3 =0.033 (2.6)Clement recommends using a tip-chord wetted length to beam ratio
(L)
of 0.2 and a
root-chord wetted length to beam ratio
(r)
of 0.8. Using these values, the aspect ratio
2 AR = (2.7) bb 2 0.2+0.8 (2.8) =2 (2.9)
Next, the design trim angle, t, was selected. Clement's method is not recommended for
a deadrise angle of more than 150, therefore, it was necessary to extrapolate from the graph
below to find the recommended design trim for a deadrise of 22.090.
30
20. t
10 50 100 150
Deadrise angle
Figure 2-4: Approximate Relationship Between Deadrise Angle and Design Angle of At-tack for a Cambered Planing Surface
By assuming a linear relationship between deadrise angle and recommended trim angle,
t was found to be 4.9'. This is a relatively large trim angle and would not provide a
comfortable ride for the user. The United States Naval Academy set the target running trim
of the parent hull to be 2.50 during their tests. This value was chosen after discussions with
military operators of similar high performance planing boats, who would always aim for a trim angle of 2.5'. For this project, the average of these two trims was taken and used as the design trim angle.
4.9+2.5 (2.10)
2
The average trim angle and the given deadrise angle were used to find
yprismatic,which
represents the angle between the spray-root line and the centreline for a prismatic surface.
A correction factor of 5 was then added to account for use on a cambered surface. The
resulting angle y is the angle of the forward boundary of the wetted planing surface.
7 Yprismatic + 5 (2.12) (x
tant
=arctan
-
x+5
(2.13)
(2 tan$) 7Ctan 3.7
0=arctan - x
+5
(2.14)
(2
tan22.090
= 19.05' (2.15)The root chord length, 1r, and tip chord length, 1t, were found using the chine beam and
the above mentioned root and tip chord wetted length to beam ratios.
1r = i x b (2.16)
b
=0.8 x 11.86ft
(2.17)
=9.48ft
(2.18)
it
=
- xb
(2.19)
b
=0.2 x 11.86ft
(2.20)
=2.37ft
(2.21)
At this point, the planing surface was fully determined. The angles $ and 0 were
calcu-lated as confirmation and were verified when the diagram of the planing surface was drawn
in Rhino (Figure 2-8). $ is the angle of sweep of the 50% chord line and 0 is the sweepback
angle of the step.
I -tany x ( 'r ') Q~arctan
(
tanyxb
b))(2.22)
1 - tan 19.05' x (0.8 - 0.2)arctan
tan 19.05'
(2.23)
=66.46' (2.24) 0 = arctan 2tan$ - t ) (2.25) =arctan 2 tan 66.46' - 1 0(2.26) tan 19.05 =59.470 (2.27)Having calculated the dimensions of the cambered planing surface, it was then neces-sary to locate the planing surface on the hull. To this end, the center of pressure of the cambered surface was determined using the following equations:
First, CLbp was corrected to the lift coefficient for a flat planing plate, CLbo, using the following formula:
CLbP = CLbo-.0065 Lbo
(2.28)
CLbo = .059 (2.29)
This new term was used to find the ratio (CLbI
-CLbp (
0.033
.033
(2.30)
CLbO DL .059
Using the graph below and $, the ratio of experimental values to the values determined at Davidson Laboratory were found for the lift, and the lift to drag ratio.
0i t
0 37 4-4 5 70 7 +04
0.9
Sweepback of 500 chord line (0), dog
Figure 2-5: Cambered Planing Surfaces- Corrections for Sweepback Angle ($) to Lift and
L D CL> CLIo / Exp 0.646 (2.32) CLb>O CLI)( ) DL
(D
)Exp (Lj= 0.692 (2.33)From this, the following values can be calculated:
(Lb)p 0.646 x 0.556 (2.34) Cibo )exp =0.36 (2.35) 0.033 CLbo(exp) = 0.36 (2.36) =0.092 (2.37)
With CLbo(exp) and the design trim angle t of 3.7', (L)i can be found using the following
graph:
18
014
-10
-4 ' 0.02 0.04 0.08 0.08 '0;0.10 0.12 0.14
C1 0 0
Figure 2-6: Lift/Drag versus CLbo(exp) for Rectangular Planing Surfaces Having the Johnson Three-Term Section and Zero Deadrise, Re = 107, AR=2
(L)
D2J = 10.5
(2.38)
With
(i)'
and D), (~e it was possible to calculate (L)exp.)Jp ()D J x )exp ()J exp =10.5 x 0.692 -7.27
This value was multiplied by a correction factor of 0.925, to account for the stern sta-bilizer and air drag.
(2.39)
(2.40) (2.41)
- = 7.27 x .925 (2.42)
Dex
=6.72 (2.43)
At this point, the following graph was used to find . This number represents the
the fraction of the length of the Mean Hydrodynamic Chord (M.H.C) which the center of pressure lies on.
0.7 AR- 21 CL, .0 1 2 1 0 \ .- 1 0.6 .30 0.4 * .02 .04 .06 .08 012.10 .1j . 4 CLb0
Figure 2-7: Location of Center of Pressure versus CLbo(exp) for Rectangular Planing Sur-faces Having the Johnson Three-Term Section and Zero Deadrise
Therefore:
p
'cP = 0.528 (2.44)
ln
(2.45)
In Rhino, the plan view of the planing surface was drawn and is shown in Figure
determine the length and location of the M.H.C. The calculated angles for 0 and $ were also verified with this drawing and are labelled on the figure. The Rhino model was been scaled down from the parent hullforrn by a factor of 10. It was found that the length of the
M.H.C was 6.63ft. With this information and the longitudinal location of the center of
pressure on the wing was found. Since the cambered surface is symmetrical about the keel, the center of pressure is vertically located on the keel, at centerline.
CP = M.H.C x -c (2.46) im17 =6.63 x 0.528 (2.47) =3.5 (2.48) 0.24 0.95 0.66 M.H.C 035 0.35 0.24 1 0.95
Figure 2-8: Plan View of the Planing Surface, with Construction Lines for Determining the Location and Length of the Mean Hydrodynamic Chord (M.H.C)
In order to find the longitudinal center of pressure relative to the transom, the moments about the transom were taken assuming that the cambered surface would support 90% of the weight of the boat, while the hydrofoil on the transom would support the remaining
0.9Wx = W x (16.108ft) (2.49)
x = 17.90ft (2.50)
With this value, x, the cambered surface was located on the hull with the center of pressure of the cambered surface placed 17.90 ft forward of the transom.
After the location and boundaries of the cambered surface were calculated, the actual camber had to be determined. The graphs given by Clement in Reference [I I] for high deadrise ships were used to find a relationship between the design trim angle and Ctd given a CLbo(exp) of 0.092. Clement's graphs gave results for trim angles ranging from 1 to 3
degrees for ships having a deadrise from 5' to 22.50. The values for CLd were plotted
vs design trim angle. It was shown that they have an approximate linear relationship. Therefore, the best fit line between the points was plotted and the equation of the line was used to predict the CLd for a design trim angle of 3.7'.
Figure 2-9: CL,d versus Design Trim Angle for Rectangular Planing Surfaces Having the
Johnson Three-Term Section and Zero Deadrise,CLb(xp)0.092
CLd= -0.03-c+ .2506 (2.51)
= - 0.03 x 3.7 +.2506 (2.52)
=0.14 (2.53)
of the camber. The equation for the camber is given below where the values of X range from 0 to 1.
Y 3 + 8O2
CL_= (-20X 80X2 - 64X ) x - (2.54)
CL,d .5
The resulting camber curve is given in Figure 2-10:
Figure 2-10: Dimensionless Offsets of Johnson Three-Term Camber Curve
The cambered surface was then built in Rhino and integrated into the parent huliform. The following section will describe the construction of the cambered surface in Rhino.
2.2.2
Integration of the Cambered Surface with the Parent Hull
A 3D Rhino model of the parent hullform was provided by the United States Naval Academy and is given in the figure below.
Due to inconsistencies between surfaces, many of the surfaces had to be rebuilt us-ing the original construction lines. The bow from the original parent hull was conserved, because the spray rails fitted to the original model would not fit over any rebuilt surface.
In order to build the cambered planing surface in Rhino, the dimensions found by ap-plying Clement's method were used. Figure 2-8 and the location of the longitudinal center of pressure relative to the transom were used to located and define the boundaries of the cambered surface on the parent hull. The 2D boundaries given in Figure 2-8 were projected onto the parent hull. The camber given in Figure 2-10 was then scaled and positioned at
centerline, and at the inboard and outboard sides of the flat of chine. These cross sections were used, along with the leading edge of the projected cambered surface outline, to create
I I
Figure 2-11: Top, Perspective, Front and Left Views of the Parent Hull
the cambered planing surface. The trim function was used to remove the hull aft of the cambered planing surface and the join function was used to integrate the cambered surface onto the remaining parent hull. The model was then fully closed and the spray rails tem-porarily removed so that the model could be easily exported to Star CCM+ for preliminary
analysis. Figure 2-12 shows the cambered planing surface in blue. Everything after of the
planing surface has been trimmed.
2.3
Star CCM+ Setup
After importing the Rhino model into Star CCM+, the model was remeshed and the surface edited. Then, a virtual tow tank or fluid domain was created. The fluid domain was rectan-gular and extended 10.6ft aft of the transom and came out 5.3ft from the sides and bow of the ship. The fluid domain cut the model in half longitudinally. Due to the symmetry of the
Figure 2-12: Top, Perspective, Front and Left Views of the Cambered Planing Surface Integrated with the Parent Hullform
ship, only half the hull needed to be analysed, which reduced the computational expense of the simulation. The mesh was refined around the boundary layer, the free surface, the cambered surface and the hydrofoil. Simulations were first run with fixed trim. When the ship was allowed to heave and pitch, an overset mesh was created since it could translate and rotate with the ship. The fluid domain and meshing are illustrated in Figure 2-13.
2.4
Design of the Afterbody
While designing the afterbody, there were two main considerations; the step height and the angle between the forebody and afterbody keel lines. One design goal is to leave the afterbody out of the water. Therefore., the step must be large enough to allow full ventilation with additional allowance to account for the effect of a change in dynamic trim and sinkage
Figure 2-13: Scene of Fluid Domain and Meshing
at lower speeds, or pitching at lower sea states. However, in order to keep drag at low speeds to a minimum, the afterbody clearance from the water should be kept to a minimum
[12].
The first set of simulations were used to refine the design of the cambered surface and the design trim angle. The Results Section of this thesis details why the camber had to be reduced and the design trim angle increased. The simulation results from the analysis of the redesigned cambered surface were used in order to design the afterbody of the boat. Using the simulation data for the new design trim angle and cambered surface, a mesh of the generated free surface was exported from Star CCM+ and imported into Rhino. The shape of the generated wake was used in order to design the afterbody of the hull. It was assumed that the maximum the ship would pitch at design speed was 20, therefore, the free surface was rotated 2' clockwise, with respect to the design trim angle, in order to simulate the free surface at this worst case condition.
Clement recommends using a step height of approximately 1% of the chine beam. How-ever, a greater step height is required for deep V hulls [161. Using the free surface mesh, it was found that a much larger step height was necessary near the flat of chine to ensure the outboard edges of the step remained fully out of the water at 2' pitch. The middle
third of the hull has a constant step height of 4% of the chine beam. Then the step height gradually increases until it reaches a value of 8% at the flat of chine. In Figure 2-14, the step is coloured blue and the dimensions in feet are labelled on the back view of the hull.
1I~s<
1. iP0
Figure 2-14: Back View of the Step
Clement also recommends that the afterbody be tilted up approximately 2.5' with
re-spect to the forebody and that the afterbody be a simple prismatic surface. This direction was disregarded, and instead, the rotated free surface was used to determine the angle be-tween the forebody and afterbody keel, as well as the shape of the afterbody.
The wake profile at the position of the original transom was used to design a new transom. The wake had an interesting shape, in that there was a small peak at centerline. Figure 2-15 and Figure 2-16 show the back and top views of the generated free surface respectively.
I I a
-t i I -p 1 1
~
~I
I I I -i I -f i it 1 -a a aFigure 2-16: Top View of the Free Surface
A new transom was designed with a W shape to accommodate the peak at the centerline
of the wake. It was also thought that the W shape would decrease the stresses on the hull caused by slamming. Once the new transom was built, it was connected to the top of the step so that the W shape gradually tapered back to a V hull at the step.
Another interesting design feature of the transom was the decision to use a reverse chine. The flat of chine actually turns downward toward the water surface. A reverse chine is typically employed to redirect spray coming from the center of the hull back downwards. This helps generate lift and also reduces spray felt by passengers. It was thought that the reverse chine could also provide extra stability in roll if needed. Figure 2-17 shows the final design of the afterbody and step.
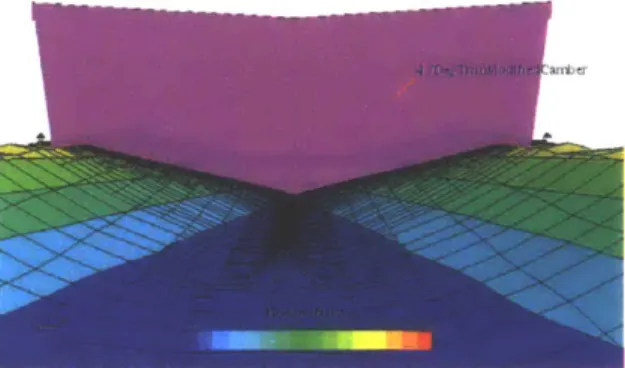
Figure 2-18 shows the complete hull with the free surface rotated 6.65' (4.65' to ac-count for the design trim of the boat + 2' pitch for the worst case scenario). Looking up from below the waterline, you can see that only the cambered surface pierces the free surface. This is exactly what we want to see because only the cambered surface and the hydrofoil should be submerged at the design condition.
2.5
Addition of the Hydrofoil
A surface piercing hydrofoil designed by Dr. Stefano Brizzolara was used as the aft lifting
Figure 2-17: Perspective Views of the Afterbody and Step
Figure 2-18: Perspective Views of the Boat in Worst Case Scenario of 2 degrees Pitch
thesis. The previous graduate thesis had used two surface piercing, super cavitating hydro-foils, which extended outboard close to the transom on his planing hull. This configuration, unfortunately, was not able to produce the desired lift per given change in trim angle. The free surface, at the location where the hydrofoils pierced the water, was nearly vertical.
Therefore, the underwater submerged area of the hydrofoil barely changed with the ship's pitch. Figure 2-19 shows the placement of the hydrofoils used in a previous thesis.
Figure 2-19: Position of Hydrofoils on Previous Thesis
The V shape of Dr. Brizzolara's newly designed surface piercing hydrofoil eliminates this problem. Using the wake profile seen in Figure 2-15, it is clear that where the hy-drofoil pierces the water, the free surface is nearly horizontal. Therefore, the underwater submerged area will change more with pitch than the previous design.
A Rhino model was provided and imported into Star CCM+. The mesh of the hydrofoil
is shown in Figure 2-20. The hydrofoil was positioned at zero angle of attack, slightly aft of the transom to accommodate a device that will be used to adjust its vertical position. It is intended that a mechanism designed by Matthew Williams, a graduate student at the iShip laboratory, will be used to raise and lower the hydrofoil during tow tank tests.
Figure 2-20: Surface Piercing Hydrofoil
A series of simulations were run in order to determine the ideal vertical position of the
configuration of the planing hull was established, two degrees of freedom simulations were performed to evaluate the dynamic stability of the boat.
2.6
Interceptor
An interceptor consists of an adjustable flat plate with a beveled end that can be lowered vertically at low speeds to provide an additional lifting surface. An interceptor was posi-tioned at the trailing edge of the cambered surface in hopes of generating more lift at lower speeds and thereby decreasing the low speed resistance. In order to model and interceptor, the trailing edge of the cambered surface was duplicated and then extruded a vertical dis-tance of 0.02ft from the trailing edge. This disdis-tance was used because it was the vertical height of the cambered surface. Figure 2-21 shows the dimensions used on a side view of ship with the interceptor in pink. Using this surface, a thin solid of rectangular
cross-section was created. The lower end of the object was bevelled at an angle of 35'. Figure
2-22 shows the bevelled edge of the interceptor.
Figure 2-21: Side View of Interceptor
2.7
Preparing Rhino Model for Model Construction
After CFD simulations were completed on the electronic model, final amendments were
made to the Rhino model to prepare it for construction. The intention is to test the model
at the United States Naval Academy's Hydromechanics Laboratory. The tow tank is 380ft
long, 26 ft wide and 16 ft deep. It has a high speed towing carriage and is able to
gen-erate long crested regular or irregular waves [1]. In order to prepare the hull for model
construction, the spray rails, the interceptor, the inceptor adjustment device and the support
platform for the pivot had to be added to the interior layout.
2.7.1
Design of Spray Rails
The original hull had three longitudinal spray rails which were removed during the CFD
simulations. Since the bow was completely out of the water during the simulations, the
inclusion of spray rails would have had a negligible impact on the results. However, during
tow tank testing, the ship will begin at 0' trim and transition to a steady state trim angle
as it begins to plane. Therefore, during tow tank testing, the spray rails will be very useful
in ensuring separation of flow. The original spray rails had to be shortened since they
extended over the area of the cambered surface. The spray rails were shortened so that they
ended 0.26 ft before the leading edge of the cambered surface. The ends were angled in
the opposite direction as the swept back V shape of the cambered surface in order to direct
more flow onto the cambered surface while underway. Figure 2-23 and Figure 2-24 show
the bottom views of both the original and new spray rails.
Figure 2-23: Bottom View of Original Spray Rails on Original Hull
Figure 2-24: Bottom View of New Spray Rails on Converted Hull
2.7.2
Modelling the Interceptor
The interceptor was originally modelled in Rhino as a additional solid extending from the trailing edge of the cambered surface. The solid was then joined to the hull and imported to Star CCM+ for simulations. In reality, however, the height of the interceptor must be adjustable. The staff at the USNA Hydromechanics Laboratory have created a device that allows for quick, easy and measurable vertical adjustments to the height of the interceptor. The device uses threaded rods with two knurled threaded discs atop to accurately move the rod up or down and help prevent any play in the interceptor plate. Oversized slots are drilled near the bottom of the plate so that machine screws can be used to secure the plate to the aft surface of the step. The interceptor plate itself is a 3/16" stainless steal plate 121.
A depiction of the inside of the interceptor device is shown in Figure 2-25.
To incorporate this design into the model, an interceptor housing was designcd and integrated to the Rhino model of the ship. The housing is designed to help locate the steel plate and also support the threaded discs on top. Through its center, there is 4/16" opening
Figure 2-25: Interceptor Device as Proposed by USNA
to allow for the passage of the interceptor with an additional 1/16" for clearance. The lower edge of interceptor follows the contours of the cambered surface and is long enough that it is able to extend at least 0.02ft. The upper edge is completely vertical to aide in the calibrated raising the lowering of the interceptor. The following figures show the design of the interceptor and interceptor housing in stages. First, a 4/16" opening was cut into the hull. Then an interceptor was created. An interceptor housing was then built around the interceptor.
Figure 2-26: 4/16" Gap Intended to House Interceptor

![Figure 1-2: General Guidelines for Different Speed Regimes[4]](https://thumb-eu.123doks.com/thumbv2/123doknet/14220225.483553/17.918.226.660.266.567/figure-general-guidelines-for-different-speed-regimes.webp)
![Figure 1-3: Model Resistance/Weight Ratio vs Speed Coefficient for Stepped and Un- Un-stepped Planing Hulls [12]](https://thumb-eu.123doks.com/thumbv2/123doknet/14220225.483553/18.918.301.592.674.999/figure-model-resistance-weight-coefficient-stepped-stepped-planing.webp)