Active vibration cancellation of tonal disturbance using orthogonal eigenstructure control
Texte intégral
Figure
Documents relatifs
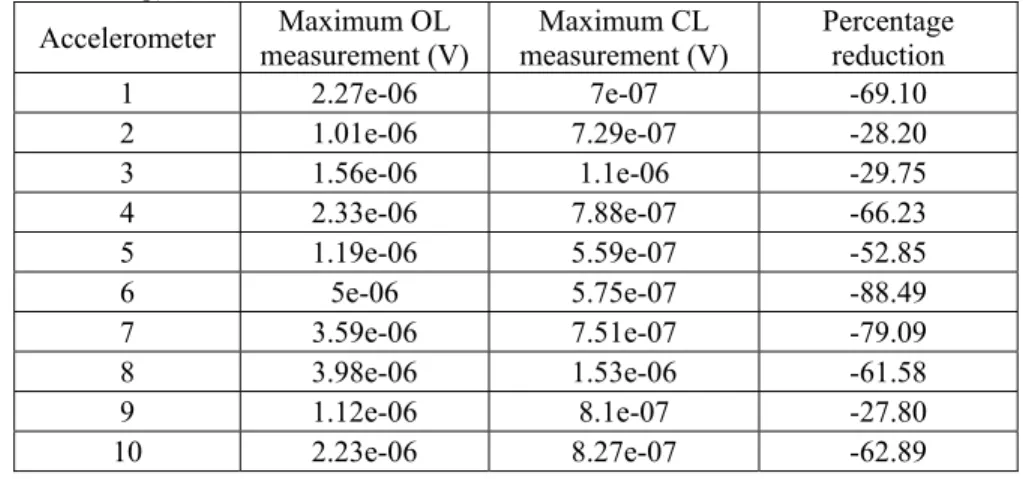
one max sensor c 2 1i (48) It equals to the output energy measured from the sensors for the ith mode divided by the maximal value of output energy obtained if the ith mode is
Lee, Optimal placement of piezoelectric sensors and actuators for vibration control of a composite plate using genetic algorithms, Smart Materials and Structures 8 (1999) 257–267.
Email address: [email protected] (M.N.. phase and gain control policies incorporate necessary weighting functions and determine them in a rational and systematic way; on
Unfortunately, this circumstance may generate a possible increment of the vibration level at other location not managed within the control algorithm; see, in example what has
In order toimprove, the power factor of the supply network, an advanced control approach based on amultivariable filter is adopted. The novelty of the proposed control
In order to improve, the power factor of the supply network, an advanced control approach based on a multivariable filter is adopted. The novelty of the
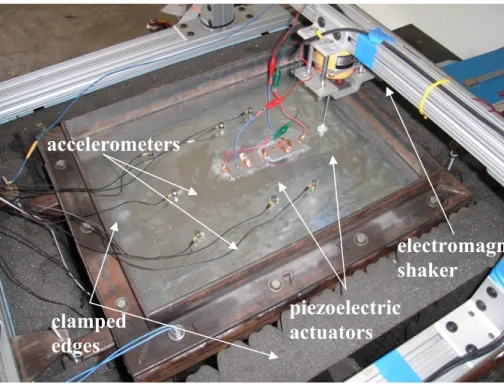
Our objective is therefore to determine a feedback controller allowing to significantly reduce the vibration energy in the central zone of the experimental beam when this beam
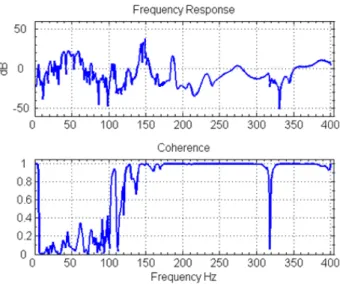
Therefore, a low-order model should refer to a model whose frequency response is close, which means the correspondence around both resonance responses and anti-resonance responses,
