r<o> <{)> <o>- <c> <c>x YZ-x-<o> :.la>-/
t,
fi
,-.---il
Répu
bliquo Algérienne l)émocratiq
ue etPopulaire
Minstère
de I'EnseignementSupérieur
et de la RechercheScientifique
Université
de
Jijel
Faculté
des
Sciences et de Ia
Technologie
Département d'Electrotechnique
i(l
ilo ii.I;
t(t i1t i,rAiij
((^ L.ù{
t
TI
TI
Tffi'
Y\
IËLt:;t.
H6ci
f,
I'
I
il
l..
i,
tlI
t1-'
6>
(
(
i1I
È xI
oI
I
TEncadré
par
:IvIr
HADEF
Mounir
-)^.--E
Année universitaire 2017|
201 8ï
I
()I
i it
Iit
otit.l
Iit
ïl
ô>- <ô> <<)> <.ar> t>â04
fr
/az
Mémoire
de
Fin d'Etudes
Présenté en
vu
de
I'obtention
du diplôme
de
Thème
Réalisépar
: Zaroure Djaber Boucherit Amine /,3.. ii i\ iiA iÙ iiAiii
Master
en
:
Electrotechnique
Option
:
Electromécanique
g'rytrr
AVflg
uNIfl
[MAÀflN5flJCI1fl
eufl
,JKD,Éffinfusx
MODf,grEi.
rynnv*[h &ux
arngh+fr*.g
prug
cr[ERs AU
'.1
ÀdoNJDfl,
ilÀfls
TeflS
CHfi-R,S
pnryerwrs
poug
rour
tflu&
SOUTIflN NdO&At DU&ANT
9fl5
nNNÉms
D'fuuDflg
EjT
"=_d
t'AMOU&
QU'Iffi
M'ONT TOUJOU&S
r*UOlg$&,ffi
uu
pÉo[fl
cfr,
r&^nVnlu:À
+
T0u5
Mfrg r"agamg
flT
gcEU&S
A
MflS
CHfr,&g
&M[5
-.'
r ':'
A
Toug
nÆs eon^uÈ@umé
Dfl
tA
p&oMorloN
:.ii
',,,
ÉHKcr&omaeguw[gufl
g'Mgr
tuVMg
uNfl
nxÀ[ÀflNgfl
ugm
eufl
tnnÉ*,tÉxgu
ÂdoDflsrfl
rnnvnm
&ux
ÊTeflh{hEs
prus
cflflRs
eu
a
MONJDE,
TWflSTAflS
gHflRs PA&flNTg
POU&
TOUT
tfl,UR
SOUTN_ENMO-,R&t
DURJhNT
EEs
XIWT{ÉES
D'fuADf,S
ET
t'AMouR
gu,nug
M,CINTTou.Jou*g
ryÉmoi#
ffi
ue
o8o[fr
cfl
T&AVAm,À
*
TOUS
MES
P'AERES
flT
g@URs
A Mfrs
gHflBS
eiÀng
,f
A
TOUS
TÆS
EOU.I.g@Uflg
Dfl
t&
P&ONdOTTON
nuEeraomeceNxQUE
Fenwrc'iewents
En
premier
lieu,
nous
remercions
âllah qui
nous
a
procuré
cesucces'
Nous tenons
à
remercier nos
chers
parents
et
familles,
et
bien
avant
tout,
trouvent
ici
ron
de
nos
remerciement
les
plus profonds
en
reconnaissance
de
leurs
sacrifrces,
aides,
soubien
eb
encouragement
afïn de
nous
r,'1,'ur:":,':"::::':'.:":::::::"'!Ï.',;#
HADEF"
pour
ses conseils
précieux
eë
pourfutes
les
,,:,"::_"::'i:x!:I:',::,iw
président
et
les membres
de
jury
d'avoir
accepbé
d'examiner
Ïuet
d'évaluer noëre
travail.
h, 'I,u'
Nos
remerciements
s'étendent
âgalement
à
tous
nos
$
*
enseignants
durant
les
années
des
études.
$
,, *-ç
-
âùr*6a@
îan&fur"
bien
str
de
remercier
profondémen*
{
bous
ceu)(
âti
ont
conbribué de prés
ou
de
loin frla
a,b,c s,1 d,q vs Q" Qr t""
m
êaL êarQ6rêg êa2 êa,Qp iY" N1 R1 IT++l Ralt Ra^2if
MSAP Mli Pilndices correspondants aux trois phases statorigue.
lndices correspondants au stator et rotor.
Indices correspondants au référentiel de pARK Vecteur de tension statorique
Flux magnétique statorique
Flux d'excitation des aimants permanents
la matrice d'induc.tance du stator. matrice de transformation de pARK f.e.m de ta partie saine de la phase.
1.".*des phases exprimées dans te plan (o,b,c)
f.e.m de la partie dffectueuse de la phase î.e.mdes phases exprimées dans le plan
la, p) Nombre de spire par phase.
Nombre de spire de ra partie du bobinage concernée par re défaut Résistance varia ble du court-circuit intermittent
Matrice de passage (a,b,c,
f)
-
(a, F, f ,O) Résistance de la partie saine de fa phase(a)Résistance de la partie défectueuse ae U phase (al
courant de court-circuit circulant entres les spires dffectueuses
Machine synchrone à aimants permanent. modulation de largeur dimpulsion. proportionnel Intégral.
I
t
L LI
t
t
t
F'igure I.1 Figure I.2 X'igure 13 Figure I.4 Figure I.5 Figure I.6Figurell.l
Figure II.2 Figure II.3 Figure II.4 F'igure II.5 Figure II.6 Figure II.7 Figure II.8 Figure II.9 FigureIII.I
X'igureIII.2
X'igureIII.3
Liste
des
figures
Moteur à aimant permanent
Diftrentes structures rotoriques pour une MSAP
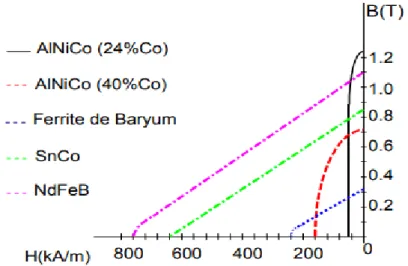
Courbe de démagnétisation des diftrents types d'aimant
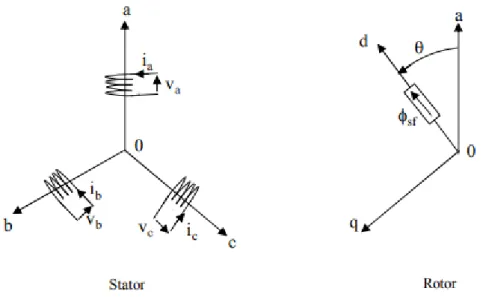
Représentation d'une machine synchrone à aimants permanents Schéma équivalent de la MSAP dans le repère (d,q)
montre le schéma d'un onduleurtriphasé avec sa charge
Schéma structurel d'une commande
DTC
appliquéeà
unMSAP
Évolution du vecteur de flux statorique dans le plan (o, B) Partition du plan complexe en six secteurs angulaires
correcteur de flux à hystérésis et selection de vectrices tensions correspondantes
Comparateur à hystérésis à trois niveaux utilises pour le réglage du couple électromagnétique 4 5 7 10 15 L5 t8 20 22 24 25
Structure générale de la commande directe de couple
(DTC)
27 Résultats de simulation démarrage àvide
2g Résultats de simulation pour une réference variable decouple
zgRésultats de simulation pour inversion de la
vitesse
30dégât de défaut
statorique
34représentation schématiqueun défaut enterspires sur une
phase
36de stator a"
schéma equivalent de la machine a aimants
avec
undéfaut
37 enter spire dans la phase a"résultats de simulation de la MSAP avec
rfi{tet p:25yo
43Figure
r,5
résultats de simulation de la MSApavec
rf:0.g5e
et p:20%oFigureIIL6
résultats de simulationde laMSAp avecrf:1.5O etp:lIyo
FigureIILT
resultats de simulation de la MSApavec
rf:1.5
e et
1t:30oÂ
Figure
III.8
résultats de simulation de la MSApavec
rf:1.5
e et
1t:50voX'igureIII.g
résultats de simulationdelaMSApavec
rf=0.4e
p:35yoFigure
III.10
résultats de simulation de la MSApavec rf:O.g
e
p:35yotr'igure
III.11
résultats de simulation de la MSApavec
rf
=1.2e
p=35yoFigure
IV.l
neurone biologiqueFigure
IV.2
Modèle d'un neurone artificielFigure
IV.3
Réseau proactif monocoucheFigure
fv'4
Réseau proactifcomplètement connecté avec une seule couche cachée 44 45 46 47 48 49 50 55 58 59 60 Figure IV.S Figure IV.6 Figure IV.7 Figure fV.8 Figure IV.9 X'igure IV.10 Figure
IV.ll
Figure IV.12 X'igure w.13 Figure w.14 Figurery.fs
Réseau récurent avec neurones cachés
schéma
bloc
de l'apprentissage superviséd,un réseau de neurone
schéma bloc de I'apprentissage non supervisé d,un
réseau de neurone
structure d'un réseau de neurones Fonctions d'activation
Architecture du réseau choisi Architecteur du réseaux
Fenêtre d'entrainement du réseau de neurones sur Matlab
Graphes de I'erreur d'apprentissage de test et de validation
Courbes de régression Sortie de RNA 6l 62 62 65 68 68 69 70 70 7l 72
Figure IV.16 Figure 1V.17 Figure
IV.l8
X'igure IV.19 X'igure W.20 Figure 1V.21 Figure n/.22 Figure 1V.23 Figure IV.24 Figure IV.25 Figure IY.26 Figure 1V.27 f igure IV.28 Figure N.29 Figure IV.30 Figure IV.31 Architecture duréseau
72Fenête d'entrainement du réseau de neurones sur
Matlab
73matrice de
confusion
73Courbes de
régression
74Entrée du
RNA
74Sortie du
RNA
75Fenêtre d'entrainement du réseau de neurones sur
Matlab
76Sortie de
RNA
77Courbes de
régression
77Fenêtre d'entrainement du réseau de neurones sur
Matlab
82Courbes de
régression
82Evaluation de I'erreur
quadratique
83(a) Fenêtre d'entrainement du réseau. (b) Courbes de
régression
83(a) Evaluation de l'erreur quadratique. (b) Graphes de
I'erreur
84 (a) Fenêtre d'entrainement du réseau. (b) Courbes derégression
85Tableau I.1 Tableau II.1 Tableau II.2 Tableru
II3
TableaufV,l
Tebleau W.2 TebleauIV3
Tablenu IV.4 Tableau fV.5Liste
des'fableaux
Propriétés Physiques et magnétiques de quelques
aimants
7 peflnanentsTable de commutation sans
vecteurnuls
26Table de commutation avec vecteur
nuls
26 Table de coiiiiilûatidii Séldn TAKAHASHI âvec Compaitâteufà
27tois niveaux du Couple
Table de fonctions d'activation (décision) les plus
utilisées
63 Essais pour le choix de l'archilecteur du réseau deneurones
67Préparation de I'ensemble de données
cibles
69 Préparation de I'ensemble de donneescibles
72 Préparalion de I'ensemble de donnéescibles
76I!-l
tI:
ii
Introduction générale
chapitre
|
:Modélisation
de
la mochine synchrone ù
oimants
permanents
l-2. Constitution de la MSAp...
l-3. Structure des aimants de la machine...
l-3-1. Aimants montés en surface (machine à pôles lisses) l-3-2 .Aimants insérés (machine à pôles saillants)... l-3-3. Aimants enterrés {machine à pôles saillants}...
f-3-4. Aimants à concentration de ffux (machine à pôtes saiilants)
14. Les aimants permanents
l-4-1. Aimants utilisés dans les MSAP...
l-5. Principe de fonctionnement de la MSAp. l-5. Avantages de la MSAP
l-7. Inconvénients de la MSAp
l-8. Les domaines d'application de la MSAP
l-9. Modélisation de la machine svnchrone à aimants permanents l-9-1. Mise en équation de la MSAp.
l-9-2. Application de la transformation de park...
l-9-3. Transformation de Clarke....
l-9-3-1. Passage direct : triphasé au diphasé..
t-9-3-2. Passage inverse : diphasé au triphasé. l-9-4. Mise sous forme d'équation d,état...
l-9-4-I. Représentation d,état....
l-9-4-2. Représentation d'état du modèle de ra MASp dans le repère d-q...
l-10. Modélisation de l'association MSAp-onduleur de tension.. l-10-1. Onduleur de tension..
l-10-2. Modélisation de I'onduleur de tension...
f-11. Conclusion..
Chapitre ll: Commande
directe
de couple
de
la
MSAP
ll-1.
Introduction...
.... j.g
ll-2. Principes généraux du contrôre direct du
coupre...
...1g
ll-3. Contrôle du flux statorique et du couple
électromagnétique...
... j.9 3 3 4 4 5 5 5 5 6 8 8 8 9 9 9 LL 12 13 13 t4 T4 !4 15 15 16 17
ll-3-1. Contrôle du vecteur flux statorique
ll-3-1. Contrôle du couple electromagnetique...
ll-4.Choix du vecteur de tension..
ll-5. Les Estimateurs du flux et du coupl.
ll-5-1. Estimation du flux statorique...
ll-5-2. Estimation du couple électromagnétique...
ll-6. Correction de flux en utilisant un comparateur à hystérésis à deux niveaux
ll-7. Correction de couple en utilisant un comparateur à hystérise à trois niveaux...
ll-8. Elaboration de la table de commande...
lf-9. Structure générale de la DTC appliqué au MSAP...
ll-10. Résultats de la simulation et interprétation...
ll-10-1. Test de robustesse pour une variation de la charge
ll-10-2. Test de robustesse pour l'inversion du sens de rotation de la machine... ll-11. Conclusion
Chapitre
lll:
Modélisation et simulation
des
défauts
statorique
des
MSAP
lll-1. Introduction ...
lll-2. Les défaillances dans les machines électriques lll-3. Le défaut dans les machines électriques....
I ll-3-7. Défauts stotoriques.
lll-3-1-1. Défauts d'isolant dans un enroulement..
ll l-3-1-2. Court-circu jt entre spires...
lll-3-1-3. Court-circuit entre phases
lll-3-2. Défauts rotoriques lll-3-z-L. Défauts des aimants..
lll-3-2-2. Défauts d'excentricité
lll-4. Modèle circuit électrique d'une MSAP en présence de défaut...
lll-4-1. Modèle (abc) de la MSAP en présence d'un défaut entre-spires...
llt-4-2. Modèle (a, Fl d'une MSAP en présence de défaut de court-circuit
lll-4-3. Mise sous forme d'état lll-5. Résultant de la simulatio....
m-5-1. Résultats de Simulation de défaut de court-circuit entre spires avec variation de Cr...
lll-5-2. Résultats de Simulation de défaut de court-circuit entre spires avec variation de la
L9 20 2t 22 22 23 24 24 26 27 28 29 30 31 32 32 32 32 33 33 33 35 35 35 35 36 40 4L 42 42 vitesse.
trI-5-3. Interprétation des résultats (cas I et cas
2)....'
45III-54. Influence de la gravite du défaut p sur la conduite de la machine..
'...
45m-5-5. Influence de la variation de la résistance de défaut sur la machine ...'...'... 48
lll-5-5. Interprétation des
résultats...
50Chapitre lV
:
Diagnostic
des
defaults
de la
MASP
par reseaux neurones
tV-3. Méthodes de diagnostic des machinesé1ectriques...
...'..'. 52lV-3-1. Méthode de diagnostic avec
modèle...
52lV-3-2. Méthode de diagnostic sans
modèle...
53tV-3-2-7. Methode por troitement de
si9no1...
53tV-3-2-2. Diaqnostic por mesure des vibrations mécaniques
...
53lV-3-2-3. Diagnostic par I'analyse des tensions statoriques
induites----
54lV-3-2-4. Diagnostic par mesure du couple
électromagnétique...
54lV-3-2-5. Diagnostic par mesure du courant
statorique...
54lV-3-2-6.Diagnosticparana|yseduvecteurdePark... tV-3-3. Diognostic por utilisotion des techniques d'intelligence
artificielle...
55lV-3-4. Réseaux de neurones
...
55lV-3-4-1.
Définition....
55lV-3-4-2. Neurone
Biologique..
55lV-3-4-3. Réseaux de neurones
artificiels..
..
56lV-3-4-4.
Historique...
56lV-3-4-5. Modélisation mathématique du réseau
neurone...
57lV-3-4-5. Différents types de réseaux de
neurones...
58lV-3-4-5-1. Réseaux
proactifs
...'... 59lV-3-4-6-1-1. Réseaux proactifs
monocouches...'...
... 59lV-3-4-6-1-2 .Réseaux proactifs
mu1ticouches...
60lV-3-4-6-2. Réseaux
récurrents..
... 61lV-3-4-7. Apprentissage dans les réseaux de
neurones...
52lv-3-4-7-2. Apprentissage semi supervisé ou apprentissage par renforcement... 62
lV-3-4-7-3. Apprentissage non
supervisé
62lV-3-4-8. Fonction
d'activation
63lV-3-4-9. Avantage des réseaux de
neurones...
ælV-3-4-10. Inconvénient des réseaux de
neurones...'..""'
æfV-3-4-11. Applications des réseaux de
nuerons'
"'-'""""'
ælV-4. Application des RN au diagnostic de la
MSAP.
"""""""""
55IV4-1. Conception du
réseau
"
65lV4-2.Résultat de
simulation
69I\14-3. Utilisation de I'outil dAjustement de Réseau de
Neurones
78IV-5
Conclusion...
86Introduction générale
Page 1
INTRODUCTION GENERALE
Les machines synchrones à aimants permanents (MSAP), avec ses différentes structures selon la nuance et la disposition des aimants sur le rotor, sont des actionneurs électriques très robustes, elles sont caractérisées par un couple massique et un couple volumique important comparativement aux autres machines classiques. Ces machines présentent de faibles moments d’inerties ce qui leur confère une dynamique caractérisée par de très faibles constantes de temps et permet de concevoir des commandes de la vitesse, du couple et de la position avec une précision et des performances dynamiques très intéressantes surtout dans les applications sensibles tels que la robotique, l’aéronautique, usage spatial et la traction électrique…etc. La sureté de fonctionnement de ce type d’actionneurs devient cependant un problème critique pour certaines applications industrielles car, à cause de la présence d’une excitation permanente des aimants au rotor, un défaut de court-circuit (CC) au stator de la machine est entretenu tant que la machine est en rotation. La détection de ce type de défaillance doit donc être réalisée au plus tôt avec un bon taux de confiance pour permettre une sécurisation rapide afin d’éviter la propagation de défaut aux autres composants du système.
Pour certaines applications, le diagnostic des défaillances des machines s’est largement développé dans le monde industriel car la volonté d’obtenir une chaîne de production de plus en plus sûre devient indispensable pour contribuer à obtenir un meilleur gain de productivité. Les chaînes de production doivent être dotées des systèmes de protections fiables car une quelconque défaillance, même la plus anodine, peut mener à un dommage matériel ou corporel inévitable sans oublier la perte de production et le coût non négligeable de réparation.
C’est pour éviter ces problèmes que la recherche, sur le plan international, s’emploie depuis plusieurs dizaines d’années à élaborer des méthodes de diagnostic. Celles-ci ont pour objectif principal de prévenir les utilisateurs d’un risque possible pouvant apparaître en un point particulier du système. Le diagnostic industriel est devenu une discipline incontournable dans le domaine de la sûreté de fonctionnement. Il existe plusieurs
Introduction générale
Page 2
procédures de diagnostic, le choix d’une approche est lié à la complexité et à la connaissance que l’on souhaite acquérir sur le système.
L’utilisation de la technique des réseaux de neurone pour le diagnostic des machines électriques permet d’obtenir des résultats interprétables et offre une information utile pour la décision d’actions à effectuer en cas de défaillance.
Le travail réalisé dans le cadre de ce mémoire présente le diagnostic des défauts de court-circuit entre spires du bobinage statorique dans la machine synchrone a aimants permanents. Ce mémoire est scindé en quatre chapitres :
Le premier chapitre fera l’objectif de deux parties : la première partie sera consacrée à des généralités sur la MSAP et la deuxième partie traitera la modélisation de la machine objet de notre étude, afin de bien étudier son comportement dynamique. Le modèle adopté est basé sur la transformation de Park
Le deuxième chapitre sera consacré à la commande directe du couple (DTC) appliquée à la MSAP. Les résultants de simulation seront présentés et interprétés
Le troisième chapitre est réservé à la modélisation et la simulation du modèle de défaut de court-circuit entre spires d’une MSAP. Après un bref rappel sur les défauts qui peuvent affecter les machines électriques, une modélisation des défauts de CC dans le repère abc et
le repère β sera validée par simulation numérique.
Dans le dernier chapitre on rappellera les différentes méthodes de diagnostic et de détection des défauts des machines électriques dans un premier temps, ensuite en se basant sur l’une des techniques les plus utilisées dans le secteur industriel appelée réseaux de neurones (RN), des tests d’apprentissage par RN sur les défauts de CC d’une MSAP seront faits par simulation afin de montrer l’efficacité des RN dans le diagnostic, la détection et la classification des défauts des machines électriques.
Finalement, une conclusion générale résumant les travaux effectués dans ce mémoire sera présentée. Nous proposerons en perspectives quelques axes de recherche.
Chapitre I Modélisation de la machine synchrone à aimants permanents
Page 3
I-1. Introduction
Le terme de machine synchrone regroupe toutes les machines dont la vitesse de rotation du rotor est égale à la vitesse de rotation du champ tournant du stator. Pour obtenir un tel fonctionnement, le champ magnétique rotorique est généré soit par des aimants, soit par un circuit d’excitation. La position du champ magnétique rotorique est alors fixe par rapport au rotor, ce qui impose le synchronisme entre le champ tournant statorique et le rotor ; d’où le nom de machine synchrone [1]. Les machines électriques sont, en général, modélisées par des équations non linéaires. Cette non linéarité est due aux inductances et coefficients des équations dynamiques qui dépendent de la position rotorique, donc du temps. Un changement de variable est souvent utilisé afin de diminuer la complexité de ce modèle dynamique, par la réduction du nombre de variables et l’élimination de la position du rotor dans les coefficients des équations différentielles. Dans ce cas, les conditions du régime permanent peuvent être déterminées beaucoup plus facilement et l’analyse de stabilité se fait plus aisément, ainsi que la synthèse de la commande [2], [3]. Ce premier chapitre contient d’abord des généralités sur la MSAP. Il présente ensuite une modélisation de l’ensemble MSAP-onduleur de tension.
I-2. Constitution de la MSAP
Comme toutes les autres machines électriques, les Machines Synchrones à Aimants Permanents (MSAP) sont composées d’un rotor et d’un stator. Alors que le stator des MSAP est toujours constitué de bobinages électriques, la particularité de ce type de machine concerne l’utilisation d’aimants permanents liés au rotor de la machine afin de créer un champ magnétique tournant.
A- Stator:
Représente la partie fixe de la machine synchrone à aimants permanents (MSAP), il est identique à celui d’une machine asynchrone, il est constitué d’un empilage de tôles magnétiques qui contient des encoches dans lesquelles sont logés trois enroulements identiques décalés entre eux de 2 π /3 [4].
B- Rotor :
Représente la partie mobile de la MSAP, formée d’un assemblage de tôles et d'aimants créant le flux d’inducteur, il est généralement de deux types [4] :
• Rotor possédant des pièces polaires servent à la concentration du flux d’induction dans lequel les aimants sont orientés soit parallèlement, soit perpendiculairement à
Chapitre I Modélisation de la machine synchrone à aimants permanents
Page 4
l’entrefer ou de manière plus complexe. Dans ce type de machine, l’inducteur est à pôles saillants.
• Rotor sans pièces polaires donc à entrefer constante, dans lequel l’aimantation des aimants est généralement perpendiculaire à l’entrefer.
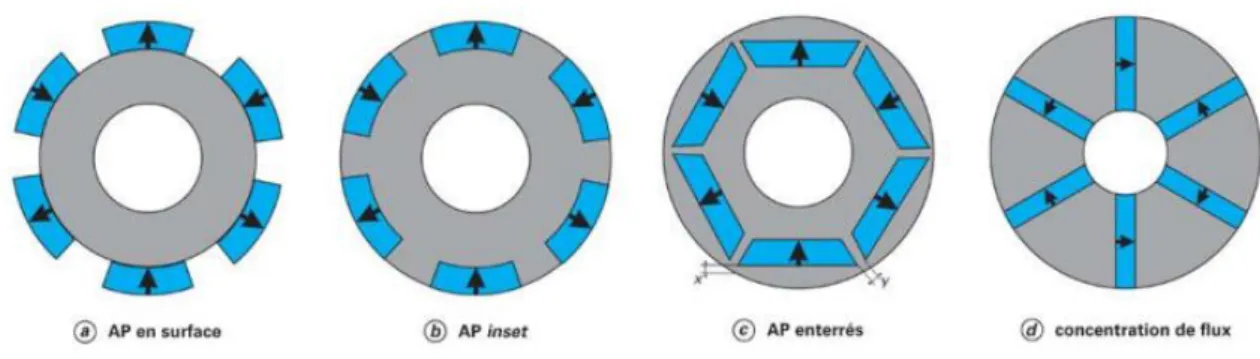
I-3. Structure des aimants de la machine :
Les machines à aimants permanents peuvent être construites avec plusieurs configurations rotoriques. Leur classification globale en termes de placement des aimants est la suivante [4]:
• Aimants en surface (Figure I-2-a), • Aimants insérés (Figure I-2-b), • Aimants enterrés (Figure I-2-c),
• Aimants à concentration de flux (Figure I-2-d)
I-3-1. Aimants montés en surface (machine à pôles lisses)
Dans ce type de machine (Figure I-2-a), les aimants sont collés directement à la surface du rotor. La perméabilité des aimants étant proche de celle de l’air, l’entrefer de la machine peut être considérée comme constante. Ainsi, la machine est à pôles lisses. Cette structure est souvent utilisée pour sa simplicité de fabrication et de commande mais aussi en raison de son rapport poids-puissance avantageux, ce qui rend cette solution très adaptée aux applications embarquées. Cependant, les aimants placés en surface sont susceptibles de se décoller à haute vitesse car ils sont soumis directement aux forces centrifuges. Une solution pour remédier à ce problème est de consolider le collage des aimants avec un tube de matériau amagnétique [5].
Chapitre I Modélisation de la machine synchrone à aimants permanents
Page 5
I-3-2 .Aimants insérés (machine à pôles saillants)
Cette structure (Figure I-2-b) est analogue à celle des aimants montés en surface. Cependant, les ouvertures entre les aimants sont remplies de fer pour créer une saillance. Cette machine à pôles saillants présente également un bon rapport poids-puissance et le collage des aimants ne nécessite plus d’être consolidé.
I-3-3. Aimants enterrés (machine à pôles saillants)
Dans ce type de machine (Figure I-2-c), les aimants permanents sont directement enterrés dans le rotor. Cette structure présente un rapport de saillance plus élevée que celle à aimants insérés. Le risque de décollement des aimants est nul cependant, le rapport poids puissance est réduit. Ainsi, cette topologie est adaptée pour des fonctionnements à haute vitesse où l’encombrement n’est pas une contrainte.
I-3-4. Aimants à concentration de flux (machine à pôles saillants)
Cette structure (Figure I-2-d) utilise une distribution tangentielle de l’aimantation (au lieu d’une distribution radiale dans les structures précédentes), ce qui implique une forte concentration du flux magnétique dans le rotor. Cela permet d’augmenter sensiblement l’induction dans l’entrefer. Cette topologie utilise principalement des aimants de type « Ferrite » pour éviter la saturation magnétique de l’acier et s’applique donc pour des applications où le volume n’est pas une contrainte [1].
I-4. Les aimants permanents
Les aimants permanents sont des matériaux durs, caractérisés par une polarisation rémanente, un champ coercitif d’aimantation, et une énergie spécifique maximale d’un point de vue macroscopique, l’état magnétique d’un aimant est décrit par trois vecteurs :
Chapitre I Modélisation de la machine synchrone à aimants permanents
Page 6
• l’induction magnétique β • le champ magnétique𝐻
• la polarisation rémanente de l’aimant 𝐽
I-4-1. Aimants utilisés dans les MSAP
Les matériaux pour aimants sont généralement classés en trois familles :
➢ Aimants métalliques : Les plus utilisés dans les machines sont les ALINCO qui ont
une induction rémanente Br relativement élevée, cependant la faible valeur de leur
champ coercitif rend difficile leur utilisation au niveau des machines électriques. En effet, un incident sérieux en cours de fonctionnement nécessite généralement une re-aimantation
➢ Ferrites : ils possèdent une induction rémanente Br faible. Toutefois leur champ
coercitif assez élevé leur confère une certaine résistance à la démagnétisation ce qui permet de les utiliser comme inducteurs des machines tournantes. Pour le dimensionnement d’une machine synchrone à aimants, la connaissance de la plage de variation de l’aimantation en fonction de la température est très utile. Les ferrites ont un point de Curie plus faible que celui des AlNiCo, leur induction diminue assez vite avec la température. Ils sont d’excellents isolants électriques, les courants de Foucault y sont négligeables.
➢ Terre-rares : les deux types des matériaux rencontrés généralement sont le SmCo et le NdFeB, ils sont durs, ont une densité d’énergie très importante et leur cycle d’hystérésis est relativement large (Figure I-3). Leur champ coercitif est supérieur à celui des ferrites. Ils ont également une aimantation suffisamment rigide pour considérer que leur perméabilité magnétique est très voisine de celle de l’aire. Leur induction rémanente est très proche de celle des AlNiCo. Toutes ces caractéristiques, font que les terres-rares sont recommandés pour les structures de machines électriques de puissances moyennes de très haute performances.
Chapitre I Modélisation de la machine synchrone à aimants permanents
Page 7
Un détail des propriétés des différents aimants permanents utilisés dans les machines électriques à aimants est donné au tableau I. 1.
Type Année D’appar. B𝐻𝑚𝑎𝑥 Kj/𝑚3 𝐵𝑟 à 25𝑜𝑐(𝑇) 𝐻𝑐𝑗 Ka/m Coeff B %/K Coeff 𝐻𝑐𝑗%/K 𝑇𝑚𝑎𝑥 Prix approx. F/kg NdFeB 1983 200-380 1,2 a1.5 900 a2000 -0,1 -0,4 a -0,6 140 à 210 500 à 1000 SmC𝑜5 1966 140-200 1 2000 -0,04 -0,25 250 1500 S𝑚2 𝐶𝑜17 180-240 1,05 2000 -0,03 350 2000 Alnico 1932 50-85 1,1 à 1;3 130 -0,02 +0,01 500 300 Ferrites Strontium 1950 27-35 0,3 à 0,4 250 -0,2 +0;4 250 40 Ferrites barium 8 à 30 0,2 à 0,4 170 -0,2 30
Tableau 𝐈. 1 : Propriétés Physiques et magnétiques de quelques aimants permanents
I-5. Principe de fonctionnement de la MSAP
Le fonctionnement de la machine synchrone à aimants permanents est beaucoup plus simple que celui du moteur à courant continu: le stator muni d’un enroulement polyphasé, triphasé dans la plus part des cas, est alimenté par un système de tentions et courants créant
Chapitre I Modélisation de la machine synchrone à aimants permanents
Page 8
dans l’entrefer un champ d’induction tournante 𝐵𝑠. Le champ d’induction 𝐵𝑠 a tendance à
attirer le rotor, lequel est muni d’aimants permanents produisant le champ d’induction 𝐵𝑟𝑖 .
De ce fait, les champs d’induction créés par le stator et le rotor ont tendance à s’aligner, raison pour laquelle un couple d’origine électromagnétique prend naissance. Comparativement à la machine à courant continu, on voit que c’est le rotor qui joue le rôle d’inducteur (excitation),
l’induit étant alors au stator. Le rotor se met à tourner à une vitesse angulaire 𝜔𝑟
correspondant à la pulsation 𝜔𝑠 de l’alimentation triphasée, ce que justifie la désignation du
moteur synchrone [4].
I-6. Avantages de la MSAP
Les machines synchrones à aimants permanents présentent plusieurs avantages par rapport aux autres types de machines [1] :
➢ Puissances massiques importantes et élevées. ➢ Absence de contacts glissants.
➢ Pas des pertes résistives au rotor ; ce qui facilite l’évaluation de la chaleur due aux pertes dans la machine. Ainsi, il y a suppression d’équipement de refroidissement au rotor.
➢ Suppression des bagues et des balais, ce qui réduit les problèmes de maintenance. ➢ Possibilité de supporter des surcharges transitoires importantes et un bon
comportement dynamique en accélération et en freinage. ➢ Grande fiabilité.
➢ Fonctionnement en survitesse.
I-7. Inconvénients de la MSAP
Comme inconvénients de la MSAP on cite [1] : ➢ Coût élevé des aimants.
➢ Interaction magnétique due au changement de structure.
➢ Influence des vibrations et des chocs sur la structure de la machine. ➢ Diminution de l’aimantation selon loi logarithmique en fonction du temps.
I-8. Les domaines d’application de la MSAP
C’est ainsi que le moteur synchrone peut être très utile dans de nombreuses applications, comme [1] :
Chapitre I Modélisation de la machine synchrone à aimants permanents
Page 9
➢ Les équipements domestiques (machine à laver le linge), ➢ Les automobiles,
➢ Les équipements de technologie de l’information (DVD drives), ➢ Les outils électriques, jouets, système de vision et ses équipements, ➢ Les équipements de soins médicaux et de santé (fraise de dentiste), ➢ Les servomoteurs,
➢ Les applications robotiques, ➢ La production d’électricité,
➢ La propulsion des véhicules électriques et la propulsion des sous-marins, ➢ Les machines-outils,
➢ Les applications de l’énergie de l’éolienne,
I-9. Modélisation de la machine synchrone à aimants permanents
La mise sous forme d’un modèle mathématique d’une MSAP est nécessaire pour l'étude de sa commande dans les différents régimes de fonctionnements transitoire et permanent. Avant d'établir le modèle mathématique nous devons nous imposer quelques hypothèses [6] :
• Le circuit magnétique de la machine n'est pas saturé, • Les f.é.m. sont à répartition sinusoïdale,
• L’effet de la température sur les résistances est négligeable, • L’hystérésis et les courants de Foucault sont négligeables,
• L’effet de peau qui augmente les résistances et réduit les inductances est négligeable, • L’entrefer est d’épaisseur uniforme.
I-9-1. Mise en équation de la MSAP
La Figure I-4 illustre la représentation des enroulements pour une machine synchrone triphasée à aimants permanents.
➢ Equations des tensions statoriques :
Les équations des tensions statoriques sont données par : [Vs] = [Rs][is] + d
Chapitre I Modélisation de la machine synchrone à aimants permanents
Page 10
➢ Expression des flux statoriques
Les équations des flux statoriques sont données par :
[ϕs] = [Lss][is] + [ϕf] (I .2) Avec:
[Vs] = [Va Vb Vc]T: Vecteur tensions statoriques
[𝑖𝑠] = [𝑖𝑎 𝑖𝑏 𝑖𝑐]𝑇 : Vecteur courants statoriques [ϕs] = [ϕa ϕb ϕ c]T : Vecteur flux statoriques
[𝑅𝑠] = [
𝑅𝑠 0 0
0 𝑅𝑠 0
0 0 𝑅𝑠
] : Matrice des résistances du stator
[Lss] = [
La Mab Mac
Mab Lb Mbc
Mac Mbc Lc
] : Matrice des inductances du stator
[ϕf] = [ϕaf ϕbf ϕcf]T: Vecteur flux créé par l’aimant à travers l’enroulement statorique.
L’étude analytique du comportement des équations (I.1) et (I.2) est relativement laborieuse, vu le grand nombre de coefficients variables. On utilise alors des transformations mathématiques qui permettent de décrire le comportement du moteur à l’aide d’équations
Chapitre I Modélisation de la machine synchrone à aimants permanents
Page 11
différentielles à coefficients constants. L’une de ces transformations est la transformation de Park
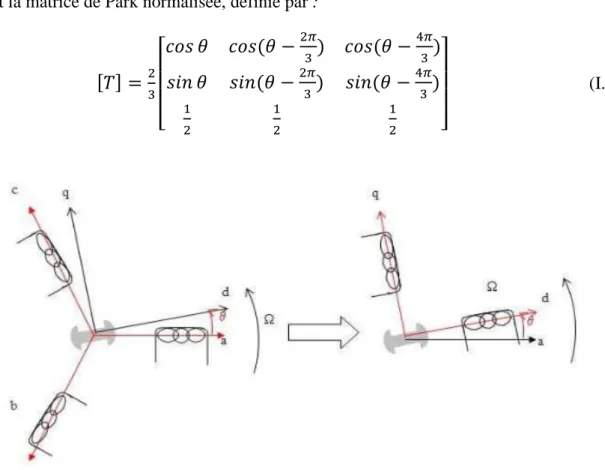
I-9-2. Application de la transformation de Park
La transformation de Park est souvent appelée transformation à deux axes. Physiquement, l’application de cette transformation à la MSAP correspond à une transformation des trois bobines (statoriques) à deux bobines équivalentes reprenant les mêmes considérations ou aspects en termes de f.m.m, de flux, de couple ou du moins une image qui leur sera parfaitement proportionnelle (Figure I-5). On définit une matrice unique de transformation pour les courants, les tensions et les flux. Elle conserve l’invariance de la puissance et est orthogonale. De plus, où fait l’hypothèse que toutes les grandeurs homopolaires sont nulles. La transformation qui traduit ce passage du système triphasé (a, b, c) au système biphasé (d, q) est donnée par [3], [7] :
{
[𝑉𝑑𝑞𝑜] = [𝑇][𝑉𝑎𝑏𝑐]
[𝑖𝑑𝑞𝑜] = [𝑇][𝑖𝑎𝑏𝑐]
[∅𝑑𝑞𝑜] = [𝑇][∅𝑎𝑏𝑐]
(I .3)
[T] : est la matrice de Park normalisée, définie par :
[𝑇] =2 3 [ 𝑐𝑜𝑠 𝜃 𝑐𝑜𝑠(𝜃 −2𝜋3) 𝑐𝑜𝑠(𝜃 − 4𝜋 3) 𝑠𝑖𝑛 𝜃 𝑠𝑖𝑛(𝜃 −2𝜋 3) 𝑠𝑖𝑛(𝜃 − 4𝜋 3) 1 2 1 2 1 2 ] (I.4)
Chapitre I Modélisation de la machine synchrone à aimants permanents
Page 12
• Equations des tensions statoriques
{𝑉𝑑 = 𝑅𝑠𝐼𝑑+ 𝑑𝜙𝑑 𝑑𝑡 − 𝜔𝑟𝜙𝑞 𝑉𝑞 = 𝑅𝑠𝐼𝑞+ 𝑑𝜙𝑞 𝑑𝑡 + 𝜔𝑟𝜙𝑑 (I.5)
• Equations des flux statoriques
{𝜙𝑑 = 𝐿𝑑𝑖𝑑+ 𝜙𝑓
𝜙𝑞 = 𝐿𝑞𝑖𝑞 (I.6)
ϕf: Flux total dû aux aimants et qui se ferme sur le stator
Le couple électromagnétique dans le référentiel (d,q) est donné par l’expression suivante:
Ce =p[(Ld− Lq)idiq+ϕfiq] (I.7)
• Equation mécanique :
𝐽𝑑Ω
𝑑𝑡 + f.Ω= 𝐶𝑒− 𝐶𝑟 (I.8)
Avec :
J : Moment d'inertie de la partie tournante (kg.m2 )
f : Coefficient de frottement visqueux (N.m.s/rad).
Cr: Couple résistant (N.m).
Ω : Vitesse mécanique (rad/s).
I-9-3. Transformation de Clarke
La transformation directe de Clarke est déterminée par une matrice [C], elle correspond les vecteurs des axes (a,b,c) aux vecteurs des axes (α, β, o) ,elle est appliquée aux tensions, aux courants, et aux flux, [Vabc] , [Iabc] , [ϕabc] aux [Vαβo] , [Iαβo] , [φαβo] respectivement. Le
vecteur X0 représente la composante homopolaire.
I-9-3-1. Passage direct : triphasé au diphasé
Si on pose θ = 0 dans l’équation (I.4), les matrices de Park deviennent les matrices de Clarke :
Chapitre I Modélisation de la machine synchrone à aimants permanents
Page 13
[Xαβo] =[C] [Xabc] (I.9)
Avec :
[Xαβo] : Représente le vecteur diphasé qui correspond au vecteur[Xabc].
[C] : La Matrice directe de Clarke, donnée par :
[C]=2 3
[
1
−
12−
1 20
√3 2−
√3 2 1 2 1 2 1 2]
(I.10)I-9-3-2. Passage inverse : diphasé au triphasé
Le passage inverse de la transformation de Clarke est définit par les relations suivantes : [𝑋𝑎𝑏𝑐]= [𝐶]−1[𝑋𝛼𝛽𝑜] (I.11)
Avec :
[𝐶]−1: La matrice inverse de Clarke.
[𝐶]
−1=
2 3[
1
0
1
−
1 2 √3 21
−
1 2−
√3 21]
(I.12)On a choisi le coefficient pour les matrices de Park et Clarke afin de conserver l’amplitude pendant le passage entre les deux référentiels.
➢ Passage du repère (α, β) au repère (d,q)
Le passage des composantes (α, β) aux composantes (d, q) est donné par une matrice de rotation exprimée par :
[Xdq] = [R] [Xαβ] (I.13)
Avec:
[R] : Matrice de passage (α, β) au (d, q)
[R]=[ 𝑐𝑜𝑠(𝜃) 𝑠𝑖𝑛(𝜃)
Chapitre I Modélisation de la machine synchrone à aimants permanents
Page 14
I-9-4. Mise sous forme d’équation d’état I-9-4-1. Représentation d’état
On cherche à obtenir un système d’équations s’écrit sous forme d’équations d’état de type :
{
𝑑𝑋(𝑡) 𝑑𝑡= 𝐴𝑋(𝑡) + 𝐵𝑈(𝑡)
𝑌(𝑡) = 𝐶(𝑡)
(I.15) X : Vecteur d’état. U : Vecteur de commande.A : Matrice fondamentale qui caractérise le système. B : Matrice d’application de la commande.
C : Matrice de sortie.
I-9-4-2. Représentation d’état du modèle de la MASP dans le repère d-q
Plusieurs façons sont possibles pour le choix du vecteur d’état, cela dépendra de l’objectif trace .Pour la MSAP alimentée en tension on choisit le vecteur d’état comme suit :
• Variable de Commande : les tensions statoriques Vd, Vq et le flux permanent
• Variable d’état : les courants id, iq.
• Variable de sortie : les courants id, iq.
En utilisant l’équation (I.5) et après arrangement le système prend la forme suivante :
{
𝑑𝑖𝑑 𝑑𝑡=
𝑅𝑠 𝐿𝑑𝑖
𝑑+
𝐿𝑞 𝐿𝑑𝑝Ω𝑖
𝑞+
1 𝐿𝑑𝑉
𝑑 𝑑𝑖𝑑 𝑑𝑡=
𝑅𝑠 𝐿𝑞𝑖
𝑞+
𝐿𝑑 𝐿𝑞𝑝Ω𝑖
𝑑+
1 𝐿𝑞𝑉
𝑞(I.16)
Les vecteurs d’état de commande et de sortie sont donnés par:
X=[𝑖𝑑 𝑖𝑑] u=[ 𝑣𝑑 𝑣𝑞 𝜙𝑓 ] y=[𝑖𝑖𝑑 𝑞] (I.17)
Chapitre I Modélisation de la machine synchrone à aimants permanents
Page 15
𝐴 = [
−
𝑅𝑠 𝐿𝑑 𝐿𝑞 𝐿𝑑𝑝Ω
−
𝐿𝑑 𝐿𝑞𝑝Ω
−
𝑅𝑠 𝐿𝑞] B= [
1 𝐿𝑑0
0
0
1 𝐿𝑞−
1 𝐿𝑞𝑝Ω
]
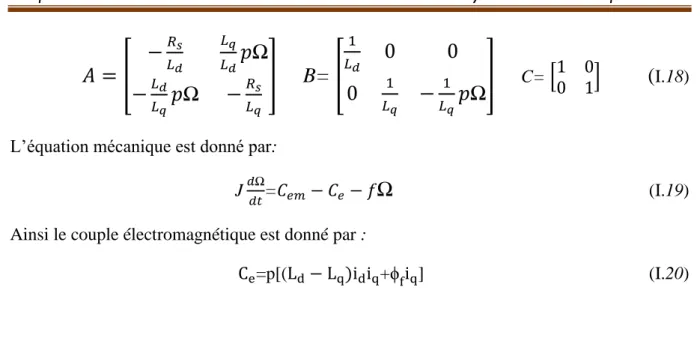
C= [1 0 0 1](
I.18)L’équation mécanique est donné par:
J𝑑Ω
𝑑𝑡=𝐶𝑒𝑚− 𝐶𝑒− 𝑓
Ω
(I.19)Ainsi le couple électromagnétique est donné par :
Ce=p[(Ld− Lq)idiq+ϕfiq] (I.20)
I-10. Modélisation de l’association MSAP-Onduleur de tension
Apres avoir présenté le modèle de la machine, on présentera le système d’entrainement complet où la machine synchrone est associée à deux convertisseurs en cascade, le convertisseur coté réseau est constitué d’un redresseur triphasé à diode et d’un filtre, et le convertisseur coté machine, un onduleur de tension triphasé la figure (I.6), illustre le schéma de principe de cette association [3].
I-10-1. Onduleur de tension
L’onduleur est un convertisseur statique assurant la conversion continu alternatif il permet d’imposer aux bornes de la machine des tensions d’amplitude et de fréquence réglable par la commande il est constitué de trois bras chaque bras est constitué de deux transistors dont la commande est complémentaire les transistors sont shuntés par des diodes de
Chapitre I Modélisation de la machine synchrone à aimants permanents
Page 16
récupération celui-ci est schématisé dans la figure chaque bras de l’onduleur peut être présenté par un interrupteur à deux positions. On distingue plusieurs types d’onduleur :
➢ Selon la source :
• Onduleurs de tension, • Onduleurs de courant,
➢ Selon le nombre de phases (monophasé, triphasé… etc.), ➢ Selon le nombre de niveaux (2,3,… etc.)
I-10-2. Modélisation de l’onduleur de tension
Pour un onduleur triphasé, les commandes des interrupteurs d’un bras sont complémentaires. Pour chaque bras, il y a donc deux états indépendants. Ces deux états peuvent être considérés comme une grandeur booléenne
• S1a,b,c =1 : Interrupteur du demi-bras haut (a, b ou c) fermé.
• S0 a,b,c = 0: Interrupteur du demi-bras bas (a, b ou c) fermé.
Pour simplifier l’étude, on supposera que :
• La commutation des interrupteurs est instantanée,
• La chute de tension aux bornes des interrupteurs est négligeable
• La charge triphasée, est équilibrée et couplée en étoile avec neutre isolé
Pour les tensions composées Uab, Ubc et Uca on a :
{
Uab = Uao + Uob = Uao− Ubo
Ubc = Ubo + Uoc = Ubo − Uco
Uca = Uco+ Uoa = Uco− Uao
(I. 21)
Uao, Ubo, Uco Peuvent être considérées comme des tensions d'entrée à l'onduleur (tensions
continues).
Soit " n" l'indice du point neutre du coté alternatif. On a:
{
Uao = Uan+ Uno
Ubo = Ubn+ Uno
Uco = Ucn + Uno
(I. 22)
Uan, Ubn, Ucn Sont les tensions simples de la machine et Uno est la tension fictive entre le
Chapitre I Modélisation de la machine synchrone à aimants permanents
Page 17
Sachant que la charge est équilibrée et le neutre isolé alors:
Uan+ Ubn+ Ucn = 0 (I. 23) La substitution de (I. 22) dans (I. 23) aboutit à:
U
no=
13
(U
ao+ U
bo+ U
co)
(I. 24)En remplaçant (I. 22) dans (I. 24), on obtient :
{ Uan = 2 3Uao− 1 3Ubo− 1 3Uco Ubn = −1 3Uao+ 2 3Ubo− 1 3Uco Ucn= −1 3Uao− 1 3Ubo+ 2 3Uco (I. 25)
D’où le système d’équations suivant :
{ Uan = Uo 3 (2Sa− Sb− Sc) Ubn= Uo 3 (−Sa+ 2Sb− Sc) Ucn= Uo 3 (Sa− Sb+ 2Sc) (I. 26) I-11. Conclusion
Dans ce chapitre, nous avons présenté dans un premier temps la structure de la machine synchrone à aimants permanents, le principe fonctionnement, ces avantages et inconvénients ainsi que ses domaines d’application, ensuite on a présenté la modélisation de la machine synchrone à aimants permanents dans le référentiel de Park. Dans ce référentiel, les équations électromagnétiques de la MSAP ont considérablement simplifiés. On a également présenté la modélisation de l'onduleur de tension.
Chapitre II Contrôle direct du couple de la machine synchrone à aimants permanents
Page 18
II-1. Introduction
Le contrôle direct du couple (DTC, ou DTFC) venu de la nomination anglo-saxonne «Direct Torque (and Flux) Control», et basé sur l’orientation du flux statorique, a été développé par des chercheurs Allemands et Japonais en 1971 pour l'usage dans la commande de couple des servomoteurs de puissances élevées. Récemment, il est de plus en plus utilisé dans l’industrie en remplaçant la stratégie de commande par le flux orienté (FOC Field Oriente Control). La DTC est une technique de commande exploitant la possibilité d’imposer un couple et un flux aux machines à courants alternatifs d’une manière découplée, une fois alimenté par un onduleur de tension sans régulation de courant faite par une boucle de retour, en atteignant l'exécution semblable à celui obtenu à partir d'une commande vectorielle [10]. Ce deuxième chapitre sera consacré au principe de la Commande DTC d’une MSAP. Les résultats de simulation seront présentés et interprétés.
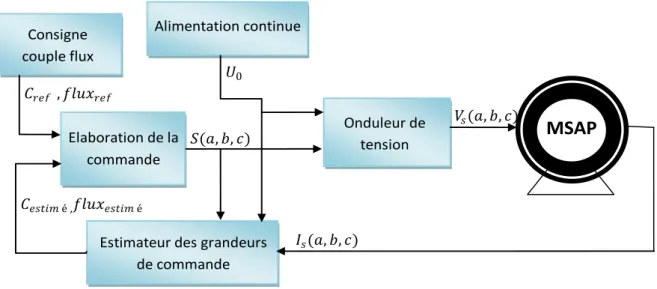
II-2. Principes généraux du contrôle direct du couple
Le principe de la commande directe de couple (DTC) est basé sur le choix des vecteurs de tension selon la différence entre la référence et la valeur réelle du couple et du flux. Des erreurs de couple et de flux sont comparées dans des comparateurs d'hystérésis. Selon les comparateurs un vecteur de tension est choisi parmi une table.
Cette technique possède généralement d’excellentes caractéristiques dynamiques qui s’étendent à des larges plages de fonctionnement couple/vitesse, et une plage de fonctionnement sans capteur mécanique avec une fréquence minimale de fonctionnement [11]. Consigne couple flux Alimentation continue Elaboration de la commande Onduleur de tension
Estimateur des grandeurs de commande 𝑉𝑠(𝑎, 𝑏, 𝑐) 𝑈0 𝑆(𝑎, 𝑏, 𝑐) 𝐼𝑠(𝑎, 𝑏, 𝑐) 𝐶𝑟𝑒𝑓 , 𝑓𝑙𝑢𝑥𝑟𝑒𝑓 𝐶𝑒𝑠𝑡𝑖𝑚 é ,𝑓𝑙𝑢𝑥𝑒𝑠𝑡𝑖𝑚 é MSAP
Chapitre II Contrôle direct du couple de la machine synchrone à aimants permanents
Page 19
En plus :
la stratégie de contrôle par DTC est insensible, dans sa version de base, aux variations des paramètres du rotor de la machine ;
l’estimation de flux statorique ne dépend que de la résistance du stator (intégration en boucle ouverte de la force électromotrice du stator) ;
le découplage entre les grandeurs de contrôle étant naturellement assuré par la commande directe, et le fonctionnement à flux variable n’affecte pas le réglage du couple ;
la mise en œuvre des commandes de type DTC se démarque sensiblement des commandes à flux orienté classiques; elles ne nécessitent généralement pas de transformation de coordonnées (Park) dans des axes tournants ;
elles correspondent le plus souvent à des stratégies de contrôle simples à des faibles coûts de calcul.
II-3. Contrôle du flux statorique et du couple électromagnétique II-3-1. Contrôle du vecteur flux statorique
On se place dans le repère fixe (α, β) lié au stator de la machine. Le flux statorique du MSAP est obtenu à partir de l’équation suivante :
Vs = rsis+dϕs
dt (II.1)
On obtient :
ϕs = ϕso+ ∫ (V0t s− rsis)dt (II.2)
La chute de tension due à la résistance du stator peut être négligée (pour les grandes vitesses), on trouve alors :
ϕs = ϕso+ ∫ (V0t s)dt (II.3)
Pendant une période d'échantillonnage, le vecteur de tension appliqué à la MSAP reste constant, on peut écrire alors :
ϕs(k + 1) = ϕs(k) + VsTe (II.4)
Chapitre II Contrôle direct du couple de la machine synchrone à aimants permanents
Page 20
Δϕs = VsTe (II.5)
Avec :
𝜙𝑠(𝑘): c′est le vecteur de flux statorique au pas d′échantillonnage actuel ;
𝜙𝑠(𝑘 + 1): c'est le vecteur du flux statorique au pas d'échantillonnage suivant ;
𝛥𝜙𝑠 : c'est la variation du vecteur flux statorique (ϕs(k + 1) − ϕs(k)) ;
𝑇𝑒 : c'est la période d'échantillonnage.
Dans le cas d’une machine synchrone à aimants permanents, le flux statorique changera même si on applique des vecteurs de tension nuls, puisque l’aimant tourne avec le rotor. Par conséquent, les vecteurs de tension nuls ne sont pas utilisés pour contrôler le flux statorique.
En d’autres termes, 𝜙𝑠 devrait être toujours en mouvement par rapport au flux rotorique. Pour
une période d'échantillonnage constante, 𝛥𝜙𝑠 est proportionnel au vecteur de tension
appliqué au stator de la MSAP. La figure (II.2) montre l'évolution du vecteur de flux statorique dans le plan (α, β)[10].
Donc pour augmenter le flux statorique, il suffit d’appliquer un vecteur de tension qui lui est colinéaire et dans sa direction, et vice versa.
II-3-2. Contrôle du couple électromagnétique
Le couple électromagnétique est proportionnel au produit vectoriel entre les vecteurs des flux statorique et rotorique selon l'expression suivante :
Ce = k(ϕs∗ ϕr) = k|ϕs||ϕr| sin(δ) (II.6) 𝝓𝒔(𝒌 + 𝟏) 𝛥 𝝓𝒔 Sens de rotation 𝝓𝒔(𝒌) α β
Chapitre II Contrôle direct du couple de la machine synchrone à aimants permanents
Page 21
Avec :
𝜙𝑠 : c'est le vecteur de flux statorique ;
𝜙𝑟 : c’est le vecteur de flux rotorique ramené au stator ;
𝛿 : c'est l'angle entre les vecteurs des flux statorique et rotorique.
Le couple dépend donc de l’amplitude des deux vecteurs 𝜑𝑠 et 𝜙𝑟 et de leur position relative.
Si l’on parvient à contrôler parfaitement le flux 𝜑𝑠(à partir de Vs ) en module et en position,
on peut donc contrôler l’amplitude de 𝜙𝑠 , et le couple électromagnétique de façon
découplée.
II-4. Choix du vecteur de tension
Le choix du vecteur de tension statorique 𝑉𝑠 dépend de la variation souhaitée pour le
module de flux statorique 𝜙𝑠 , du sens de rotation de 𝜙𝑠 et également de l’évolution souhaitée
pour le couple. En se plaçant dans le repère statorique (𝛼, 𝛽 ), on peut délimiter l’espace de
𝜙𝑠 en le décomposant en six zones appelées secteurs ; déterminées à partir des composantes
de flux suivant les axes (α) et (β). L’axe (α) et choisi confondu avec l’axe (a) de l’enroulement triphasé (𝑎, 𝑏, 𝑐 ).
Lorsque le flux 𝜙𝑠 se trouve dans une zone 𝑖 (𝑖 = 6, . . .1 ), le contrôle du flux et du couple peut être assuré en sélectionnant l'un des huit vectrices tensions suivantes :
si 𝑉𝑖+1 est sélectionne alors 𝜙𝑠 croit et 𝐶𝑒 croit ; si 𝑉𝑖−1 est sélectionné alors 𝜙𝑠 croit et 𝐶𝑒 décroit ;
si 𝑉𝑖+2 est sélectionne alors 𝜙𝑠 décroit et 𝐶𝑒 croit ; si 𝑉𝑖−2 est sélectionne alors 𝜙𝑠 décroit et 𝐶𝑒 décroit ;
si 𝑉0 au 𝑉7 sont sélectionné, alors la rotation du flux 𝜙𝑠 et arrêtée, d’où une
décroissance du couple alors que le module de flux 𝜙𝑠 reste inchangé.
Le niveau d'efficacité des vecteurs de tension appliqués dépend également de la position du vecteur de flux statorique dans la zone 𝑖.
En effet, au début de la zone, les vecteurs 𝑉𝑖+1 et 𝑉𝑖+2 sont perpendiculaires à 𝜙𝑠d'où une
évolution rapide du couple mais une évolution lente de l'amplitude du flux, alors qu'à la fin de la zone, l'évolution est inverse.
Chapitre II Contrôle direct du couple de la machine synchrone à aimants permanents
Page 22
Alors aux vecteurs 𝑉𝑖−1 et 𝑉𝑖−2, il correspond une évolution lente du couple et rapide de
l'amplitude de 𝜙𝑠, au début de la zone, alors qu'à la fin de zone c'est le contraire. Quel que soit
le sens d'évolution du couple ou du flux, dans la zone 𝑖, les deux vecteurs 𝑉𝑖 et 𝑉𝑖+3 ne sont
j’amis utilisés. En effet, ceux-ci génèrent la composante de flux la plus forte (évolution très
rapide de 𝜙𝑠 ) mais l'effet sur le couple lui, dépend de la position de 𝜙𝑠 dans la zone, avec un
effet nul au milieu de la zone.
Le vecteur de tension statorique 𝑉𝑠 à la sortie de l'onduleur à appliquer au moteur, est déduit
des écarts de couple et de flux estimés par rapport à leur référence, ainsi que de la position du
vecteur 𝜙𝑠 . Un estimateur de module 𝜙𝑠 de et de sa position ainsi qu'un estimateur de couple
est donc nécessaire pour une commande DTC [11] [12].
II-5. Les Estimateurs du flux et du couple II-5-1. Estimation du flux statorique
L'estimation du flux peut être réalisée à partir des mesures des grandeurs statoriques courant et tension de la machine. A partir de l'équation :
ϕs = ∫ (V0t s− rsis)dt (II.7)
On obtient les composantes α et β du vecteur 𝜙𝑠 :
ϕs = ϕsα+ jϕsβ (II.8) 𝑉2(110) 𝑉1(100) 𝑉3(010) 𝑉4(011) 𝑉5(001) 𝑉6(101) 𝑉0(000) et 𝑉7(111) α β
Chapitre II Contrôle direct du couple de la machine synchrone à aimants permanents Page 23 {ϕsα= ∫ (Vsα− rsisα)dt t 0 ϕsβ = ∫ (V0t sβ− rsisβ)dt (II.9)
On obtient les tensions et à partir des commandes ( 𝑆1, 𝑆2, 𝑆3), de la mesure de la tension 𝑈0
et en appliquant la transformée de Concordia:
Vs = Vsα+ jVsβ (II.10)
{
𝑉𝑠𝛼 = √23𝑈0(𝑆1−12(𝑆2+ 𝑆3))
𝑉𝑠𝛽 = √12𝑈0(𝑆2− 𝑆3)
(II.11)
De même les courants 𝑖𝑠αet 𝑖𝑠β sont obtenus à partir de la mesure des courants réels 𝑖𝑠a, 𝑖𝑠b et
𝑖𝑠c et par application de la transformation de Concordia:
𝑖𝑠 = 𝑖𝑠α+ 𝑗𝑖𝑠β (II.12)
{
𝑖𝑠α = √32𝑖𝑎
𝑖𝑠β= √12 (𝑖b− 𝑖c)
(II.13)
Le module du flux statorique s'écrit :
ϕs = √(ϕsα)2+(ϕ
sβ)2 (II.14)
La zone 𝑍𝑖 dans laquelle se situe le vecteur 𝜙𝑠est déterminée à partir des composantes 𝜙𝑠α et
𝜙𝑠β . L'angle 𝜃𝑠 est égal à :
θs = arctgϕsα
ϕsβ (II.15)
II-5-2. Estimation du couple électromagnétique
Le couple électromagnétique peut être estimer à partir des grandeurs estimées du flux 𝜙𝑠α
et 𝜙𝑠β et les grandeurs mesurées du courant 𝑖𝑠α et 𝑖𝑠β. Le couple peut se mettre sous la forme :
Chapitre II Contrôle direct du couple de la machine synchrone à aimants permanents
Page 24
II-6. Correction de flux en utilisant un comparateur à hystérésis à deux niveaux
Ce correcteur est simple dans son application. Son but est de maintenir l’extrémité du
vecteur de flux statorique 𝜙𝑠 dans une couronne circulaire comme le montre la figure (II.4).
Figure II-4 : Correcteur de flux à hystérésis et sélection de vectrices tensions
correspondantes
On peut écrire ainsi :𝜀𝜙
{ Si Δϕs > εϕ alors Kϕ= 1 Si 0 ≤ Δϕs ≤ εϕ et dΔϕ dt > 0 ⁄ alors Kϕ= 0 Si 0 ≤ Δϕs ≤ εϕ et dΔϕ dt < 0 ⁄ alors Kϕ= 1 Si Δϕs < −εϕ alors Kϕ= 0 (II.17)
En effet, si on introduit l'écart 𝛥𝜙𝑠 entre le flux de référence 𝜙𝑠∗ et le flux estimé 𝜙𝑠^ ,
dans un comparateur à hystérésis à deux niveaux, celui-ci génère à sa sortie la valeur 𝐾𝜙 = 1
pour augmenter le flux et 𝐾𝜙 = 0 pour le réduire; cela permet de plus d’obtenir une très
bonne performance dynamique du flux. Ainsi, seul les vecteurs𝑉𝑖+1ou 𝑉𝑖+2 peuvent être
sélectionnés pour faire évoluer le vecteur de flux statorique 𝜙𝑠 . Par contre, ce correcteur ne
permet pas l’inversion du sens de rotation du vecteur de flux 𝜙𝑠 Ainsi, pour aller en «marche
arrière», on s’impose un croisement d’un bras du convertisseur [10].
II-7. Correction de couple en utilisant un comparateur à hystérise à trois niveaux
Un comparateur à hystérésis à trois niveaux (-1, 0, 1), permet de contrôler le moteur dans les deux sens de rotation, en générant soit un couple positif, ou un couple négatif, ce
comparateur est modélisé par l’algorithme (II.18), tels que 𝐾𝑐 représente l'état de sortie du
comparateur et 𝜀𝐶𝑒 la limite de la bande d’hystérésis ( figure II.5).
𝐾𝜙 0 +1 𝛥𝜙 𝑠 = 𝜙𝑠∗− 𝜙𝑠^ 𝜀𝜙 𝛥𝜙𝑠 𝜙𝑠 -𝜀𝜙 𝑣4 𝑣5 𝑣4 1 2 3 4 5 6 𝑣4 𝑣3 𝑣5 𝑣3 𝑣2 𝑣6 𝑣5 𝑣6 𝑣3 𝑣2 𝑣1 𝑣2 𝑣1 𝑣6 𝑣1
Chapitre II Contrôle direct du couple de la machine synchrone à aimants permanents
Page 25
On peut écrire alors
{ si ΔCe > εCe alors Kc = 1 si 0 ≤ ΔCe ≤ εCe et dΔCe⁄dt > 0 alors Kc = 0 si 0 ≤ ΔCe ≤ εCe et dΔCe⁄dt < 0 alors Kc = 1 si ΔCe < − εCe alors Kc = −1 si −εCe ≤ ΔCe < 0 𝑒𝑡 dΔCe⁄dt > 0 alors Kc = 0 si − εCe ≤ ΔCe < 0 𝑒𝑡 dΔCe⁄dt < 0 alors Kc = −1 (II.18)
En Introduisant l'écart𝐶𝑒, entre le couple électromagnétique de référence 𝐶𝑒∗ et celui estimé
𝐶𝑒^ dans un comparateur à hystérésis à trois niveaux (figure II.5), celui-ci génère la valeur
𝐾𝑐=1 pour augmenter le couple, 𝐾𝑐= -1 pour le réduire et 𝐾𝑐= 0 pour le maintenir constant
dans une bande 𝜀𝐶𝑒 autour de sa référence. Ce choix d'augmenter le nombre de niveaux est
proposé afin de minimiser la fréquence de commutation moyenne des interrupteurs, car la dynamique du couple est généralement plus rapide que celle du flux. De plus, ce correcteur autorise une décroissance rapide du couple, en effet, pour diminuer la valeur de celui-ci, en
plus des vecteurs nuls (arrêt de la rotation de 𝜙𝑠 ), par exemple on peut appliquer les
vecteurs 𝑉𝑖−1ou 𝑉𝑖−2, si l’on choisit un sens de rotation positif (sens trigonométrique). Dans ce
cas, le flux 𝜙𝑟 rattrapera d’autant plus vite le flux𝜙𝑠 [10]. 𝐶𝑒
1
-1
−∆𝐶𝑒
∆𝐶𝑒 𝜀 = 𝐶𝑟𝑒𝑓.𝐶𝑒
Figure II-5 : Comparateur à hystérésis à trois niveaux utilisés pour le réglage du couple
électromagnétique. Kc
𝛥𝐶𝑒=𝐶𝑒∗− 𝐶𝑒^
εCe
Chapitre II Contrôle direct du couple de la machine synchrone à aimants permanents
Page 26
II-8. Elaboration de la table de commande
La table de commande est construite en fonction de l’état des variables des sorties du
correcteur à hystérésis du flux (Kφ ) et du correcteur à hystérésis du couple 𝐾𝑐 , et de la zone
de position de 𝜙𝑠 elle se présente donc sous la forme suivante :
Flux Couple 𝑆1 𝑆2 𝑆3 𝑆4 𝑆5 𝑆6 Kφ =1 Kc=1 𝑉2 𝑉3 𝑉4 𝑉5 𝑉6 𝑉1 Kc =0 𝑉6 𝑉1 𝑉2 𝑉3 𝑉4 𝑉5 Kφ =0 Kc =1 𝑉3 𝑉4 𝑉5 𝑉6 𝑉1 𝑉2 Kc =0 𝑉5 𝑉6 𝑉1 𝑉2 𝑉3 𝑉4
Table (II.1) : Table de commutation sans vecteur nuls
Dans ce cas, si 𝛥𝜙𝑠 et 𝛥𝐶𝑒 sont égales à 1 (erreurs positives) alors, on exige une augmentation
du (flux/couple) et si elles sont égales à 0 (erreurs négatives) alors on applique une diminution du (flux/couple).
L'utilisation des séquences nulles des tensions permet de diminuer la fréquence de commutation moyenne du variateur, en particulier, lorsque la vitesse de rotation reste faible [11]. Flux Couple 𝑆1 𝑆2 𝑆3 𝑆4 𝑆5 𝑆6 Kφ =1 Kc =1 𝑉2 𝑉3 𝑉4 𝑉5 𝑉6 𝑉1 Kc =0 𝑉7 𝑉0 𝑉7 𝑉0 𝑉7 𝑉0 Kφ =0 Kc =1 𝑉3 𝑉4 𝑉5 𝑉6 𝑉1 𝑉2 Kc =0 𝑉0 𝑉7 𝑉0 𝑉7 𝑉0 𝑉7
Table (II.2) : Table de commutation avec vecteur nuls
Les séquences nulles 𝑉0 et𝑉7, sont indépendantes de l'état du flux, elles sont liées uniquement
à l’écart 𝛥𝐶𝑒. Ces séquences sont appliquées lorsqu'on souhaite maintenir le couple dans sa
bande :