futmlert:":ietnents
Au
terme
[e
mon
trnait, je
ticns à
eryrimer
mes
sincères
remerciements
fzspks
proJ:on*;
tous
ta6or[
à
cD]E')
lVpftn
puissant
pour
fe
courage
et
fa
rtotonté
qu'if
nous
pro[igue,
cl'é[e r'étuite
[ans
rus
étuîes.
le
tiens
à
remercier sincèrement
g.tonsieurt{n(AEF
9WO'OMQg
quù
en
tant
qw
Qirecteur
[e
mémoire
et
enca6r'eur
professiannef,
stest
touiours montré
à
['écoute
et
très
[isyoni,fe
tout
aru
tbng
[e
fa
réafisatbn
t'[ece travaif,
ainsi
pour f'insyiration, ['ai[e
et
[e tenLps
qu'if a
6ien
pou,kt
îu
consacrer
et
sdns
qui ce
mémoire
n'aurait jamais
vu
k
jour.
Je tiens à
remzrcicr
fes
memhres
[e.iury,
qui
m'ont
llonoté
en
dcceptant
[e
juger
ce mo[este
traed'i[
le
profite
toccasian
pour
remeralzr
tous
fes enseignan:'ts
qui ont
contri|ué
à
notre
formation.
fl
tous
æu4qui" [e
près
ou
[e
[oin, ont
aryorté
hur
ca'ntriïution
à
fa
réafisation
f,e ce
trartai[,
je
vous
pric
[e trower
ùti'
f
elpression
de
ma
profo
ndb
re connais
san
c e;
L,îstle
des
a,b,c
d,q
I/" o, ëj L""Lr
P@)P(0)'
Indices correspondants aqx
mis
phases stâtoriqu€s. lndices correspondants aq stalor et rotor.hdices conespondarlts aq rgérentiel de PARK
Vecteur de tensions statorliques. Flux magnétique statoriqle
Flux d'excitation des aiminhr permanents. La matrice d'iûductance dF siator.
Inductance de fuite statorique. Matrice de traqsformatio4 de PARK.
Mahice de transformatiori in ierse de PARK.
/e.zr
des phases exprimefs dbns le plan(a
4
c)f.e.n.
delapàrtie
saine de la phase(
a)
êoz
J.e.n.delaparlie
defectu{use de la phase < a >ed,eé
/e.l,|.
des phascs expdmcçs dans lç plan(a,B)
N-
Nomhe
de spi{es en cou4-cir.cuit intermittentRr
Résistance variable du court-circuit intermittent1T,,1
Matrice de pas$age(4
b.l.f-t0.
d,p.J)
t_4 J
&,
Résistance de la partie saiire de la phase(
a DR.,
Résistance de lF partie défecoeuse de la phase < a >y"1
Tension de la partie saine de la phase(
4 ))V",
Tension de la{artie défecfuerrse de la phase < a >
r(" ,
Ç,
Gainsintigral
et proportiqnnrll du coûecteur de couranti.
Courant de cor]rt-circuit cfrcrrlant eatres les spires défectueus€sMSA?
Machine svnchrone à aimÊntri Demanents.MLI
Modulation de iargeur d'ifnpuisrons.PI
Proportionnellntégral.INTRODUCTION GENERALE
Modélisation
dela
I-1. Introduction... I-2.Définition...
I-3, Constitution... I-3-1. Stator...I-3-2-
L
Aimants en surface .. ... .,..I-3-2-2.
Aimalts
inséés... f-3-2-3. AimaDrs enrerrés...,...,...I-3-2-4. Aimants à çonceûtration de
I-4. Aimants permanents
14-1.
Aimalts
pernanents ftittes...I-4-14.
Néodyme-Fer-Bore...I-4-2Aimants tiés...
I-5, Caractéristique de désaimartation.,,. I-6.
Diftrents
types d'alimentation...I-6-1. Alimentation oar
m
I-6-2. Alimentation oer rm ondulcur I-7. Couple des machines sFchmnes à
I-7-1. Couple de dét€nte...
I-7-2. Couple reluatatc€
I-7-3. Couple mutuelle...,...,...,...,.
lJommaire
llhapitre
I
SlTchrone
ÀAimrnts
P€rmrtrents
8 9 o permanents...,...,,...,. 12 12
t2
t2
Chapitrc
II
lI-
I 0. ConclusionIII-2.
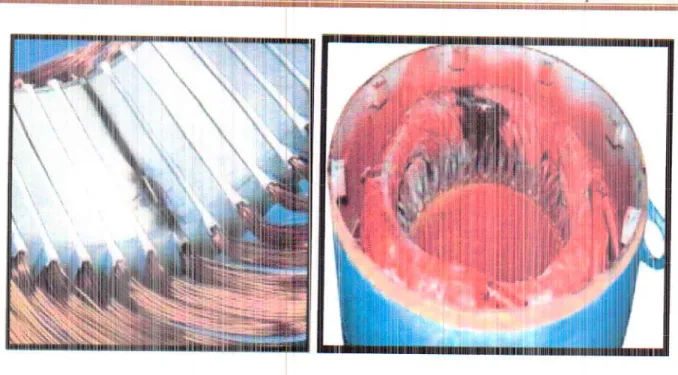
DéfaillaDces au stator desIII-3.
Défaut de ooult-circuit desIII-4-1.
Modèle de la MSAP enIII-4-2.
Modèle d'une MSAP enIV-I.
Intoduction
IV-2.
Qu'est<e que le diagnosticIV-3.
Methodes de détection de défauts les machines éIectrioues ...,...,..., 78II-5.
Dimensionneûent des régulateurs .II-5-1.
Régulateur decourant
4,....,.
II-5-2.
Régulatcur du couraDt ,Ie...43
46
II-5-3.
Régulatior de la vitessc ...II-6. Limitation
des aourants,...,...II-7.
Schéma global de simulation...II-9.
lnterDÉtation des résultats...Modélisation et
d€sdéf&ub
satoriqu€s de laMSAP
lI-
l.
Introduction ....)o
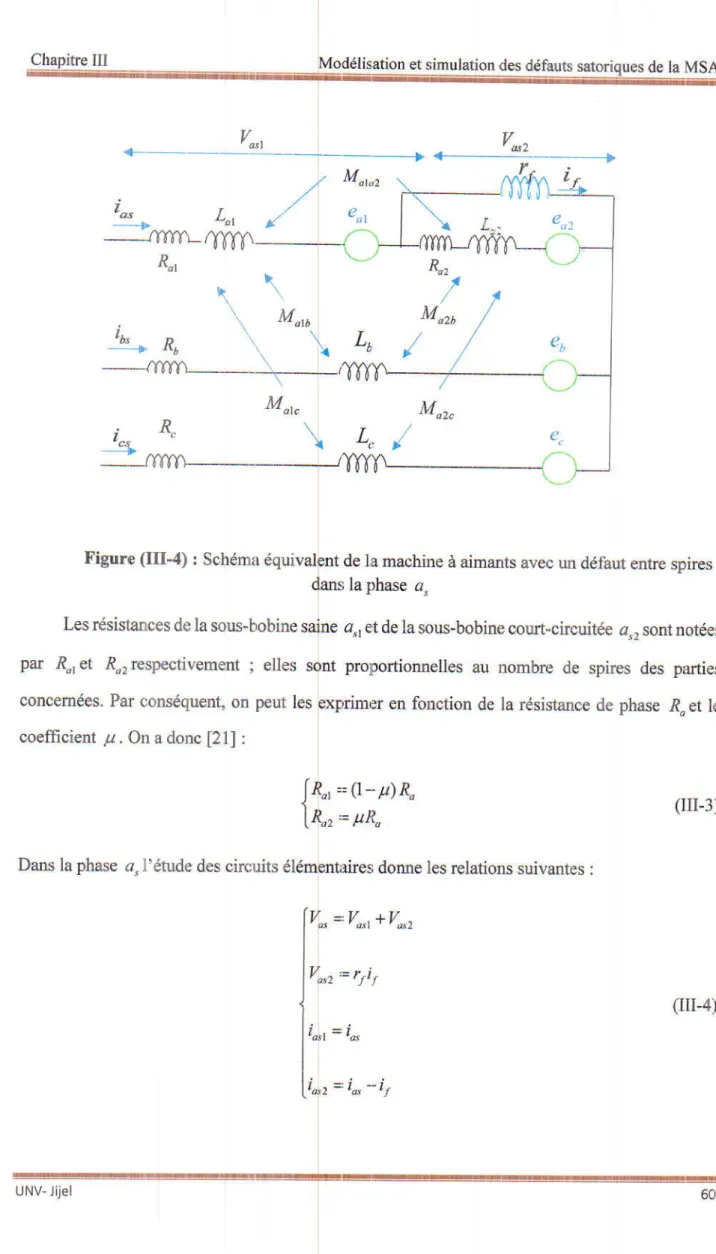
III-4.
Modèle de la MSAP en présence défaut de court-citcuit enûç spire...,...,.. 58d'un défaul entre-spiæs dans le
reÈre (abc)...59
dars le repère (d,
f
)
...-... 63'...'..',...,..',... 64
III-3-1.
Court-circuit entre phases.,...,..III-3-2.
Circuit ouvert sur une phase ....Ill-4-3.
Mise sous forme d'étal ...III-5.
Résr tats de la Simulation ..,...,...m-5-1.
lnte4netation dcs ésul1ats...iII-5-2,
lnterprétation des resultars...III-6.
Conclusion... éj|ectriques...,...,...,...,...,...,...,...,.,...,.. 57)t
57 65 69 75 Cbapitr€ fV
IV-9-4-3,
Méthodç des HauteursIV-10.
Survcillance du stato. à I'aided
IV-10-1.
Système desùveillance..,.
IV-10-2.
Fonctions d'appartenance....IV.l0-3.
règles floues des fonclionsIV-10-4.
Système d'inférence...IV- l I . Résultats et interprétation ...
IV-12.
ConclusionConclusion générale
100 108
oductio'n
,t
Intmrduction
Générale
læs machines électdques occupenl utre place importante
dan! le
nqn6e
industriel. Êllessont largement utilisées aussi bien dans le processus de la productc,n de
l'énergi€
(génératrice,Alteriateur)
que dans le processus de rsa consoûmation.cette
énergie électriquc csr consommeeen
majeue
partie par le$ moteuls électdques.Lesdéfa'ts
dans res machines érectriques peuventêtre d'origine
mécadque (excentdcité
du
rotor, défaut sur les
accouplements,uswe
desroulements,...),électrique
(cout-citcuit
du bobinage statorique, ruptujre de barre oud,a:neau,...)
ou magnétique (défaut d'isolement entre lesr tôles statodques).Ces défautssort
essentiellementdus aux
éohauffements excessifs,fatigue
causéepar
les
forces
électromagnétiqueset
les contraintes de I'environnement que doit subir. la machine pendant son usage habituel.La
swveillance
etle
diagnostic des drlfauts de fonctioûnement des machines électriques sont devenus inconloumables en raisorr des conaaint€s croissantes imposées par les exploitants.La
surveillanced'un
dispositif implique
l€
diagrostic
des défauts:
il
consiste enla
détectiond'un
changementanomal
dans le comportenent ou l,étatd'un
système et dans la localisation desa
cause.Le
but
est
de
garantir
la
sécudiéet
la
continuité
de s:rvice et
d,enregistrer les événernentsutiles
pour la
maintenance cwsLtiveou le
retour
d'exprlrience.Il
existÊ plusieurs procédures de diagnostic, le choix d'une approche est lié à la complexit(i et à la connaissance quel'on
souhaite acquérir sur le système.Ainsi
deux grandes familles sont utilisées dans ae domaineen
génieélectrique:
les
méthodesà
base cles modèlesanalyiques
reposentsur
le suivi
des paramèheset
des
grandeursde
la machine,
au
moyen d,algoritbmes d'observation
et
lesméthodes sans modèles sont basées sur l'exarrction des
infomations siglificativessur
les défautspar le biais du ûaitement des signaux mesurlis tels que les
couants,
les tensions, la vitesse, l€svibrations, la températue, . . etc.
L'utilisation
de techniques de la logiqueflouepoul
le diagnostio ,1es machines électriquespeûnet
drobtenir des résultats interprétableset
offie
une
inlbrmaticn utile pour
la
décision d'actions à etïectuer err cas de défaillance.Lçs m.rchires synchroles à aimallts permanents
(MSAP) ont
connu ces dernières annéesun
grand
essor,
C'est grâce
à
l'amélioration des
qualités
des
aimants
pemanents
plus précisémentà l'aide
des terresnres, au
développementde
l'électrorriquede
puissÉmceet
àmr.rltiples, parmi lesquels nous pouvons cit-er : rcbustesse,
faible
ite(ie,
couple mass'ique élevé, rendement élevé. vilesse ma,\imale sutDédeure etfaible cout d'entretiçn.Les
défautsd'origile
électriquecomne
la
dégladationde
1a matière isolenrtesont
desdéfauts intemes
qui
se développent claûs laMSAP
elle-même au cours du fonctionnemenl.lls
sont causés par la
commutatior
rapide desconposarts
del'électrodque
de puissatce. Dans cecas, les enroule,ments
de la
machinessonl
soumisà
des tmnsitoirelr de tensionékvés ce qui
entraine
la
dégradarion des propriétésdi(ileckiques
et
leviçilliss€inlentaccéléé de
I'isolant,
laissant place à des défauts inter-spirei.
Le
tnvail
éalisé
dansle
cadrede
ce mémoire
présente le, diagnostic des défauts du bobinage statorique (court-circuit enûe spires)dans la machine s)'nci]Ione â aimants ltermanents.Se mémoire est scindé en quaae chapitrçs ;
Dans le premier
chapite
nous présenlerons, dans une première partie des gfuéralités sul laMSAP.
La
d€uxième
partie est
consacréeà
sa
modélisation pennettant l'étude
de
soncomportemert d)'namique. Le modèle adopÉ est basé sur la transfonnation de Park'
Le
deurième chapitre est consacré àla
çoûmandevectorielk:
appliquée àla lt{SAP.
Les résultats de simu.lation sont présentés et interprétésLe
troisième chapitre
trait€
la modéliration
d'un
défaut
missant
dans
le slator
des machinessynclfoncs
à aimants permao€ntlr. Ënparticulier
il
s'apptrir: sur les défaillances inter-spires dans le stator des MSAP.Le demier chapitre haite te di4gnostic d()s défauts statodques al€s
MSAP
par la techniquede
la
logique floue.La
prcmièrepafiie
coirstil;ue unbref
état deI'at
relatif
aux techniques de diagnostic des défaillances dansles
machin€s électriquesen
padiJulier
la
logique
floue,
la
deuxième partir) est: consacrée aux r,ésultalsde
simulation dela
machineà l'état
sainet
avecdéfaut.
Une concLusi<rn générale vient clôturer les quaae chapitres de ce,
mânoire.
Une propositionC,
M
Sy
Pe
upitre
I
délisation
de
la
M
chine
chrone
à
Aimants
manents
Chapihe
I
Mod'ilisdion de la Machine Syn,:hrone à Aimanrs PermanentsI-1.
Irtroductior
L'étude de la commande d'un système est un travail qui nécessite unç bonne connaissance de son modèle dynamique afin de bien préJire son comportement
dms
les différents modes defonctionnements envisagés.
Lamodélisation d'une machine électrique €st une phase primontiale de son développement. Les progrès de l'informatique et du génie des logiciels pemettent de réaliser des modélisations
performantes et d'envisager l'optimisation cles lnachines él€ctriques.
Ainsi,
l'élaborationdu
modèle mathématique sousforme
dynamiquede
lâ
machine électrique est indispensable pour observer el analyser les différçntes é\/olutions de ses gBndeurs élechomécaniques d'une part etd'aure
part de prevoir le contrôle nécessaires'il y
a lieu pour pallier aux différents effets contraignants qui peuvent accompagner généralement les opérationsde démarrage, de freinage, de variation de charlle, etc....
Dans ce chaDitre,
la
modélisation dela
machine s)mchroneà
aimants permanents sera présentee à cet effet, le modèle triphasé ainsi que le modèle obtenu à I'aide de la ftansformation de Park seront abordés, la validation du modèle ainsi obtenu sera efiecluée par simulation [1]I-2.
Délhition
Une maohine synchrone est une machine à champ toumant qui sr) caractérise par le fait que
la vitesse de rotation €st en synçhionisaton avec le çhamp tournant.
I2l
[3] La vitesse de rotation du champ tournant est proportionnelle au norabre de pôles de la machine et à la pulsation des oourânt statoique. On note[4]
:o
=, @=6of
pp
C, : La vitesse de rotation de la machine(tr/min)
a
: La pulsation des courants stâloriqu€s(radl!,
p
: Nombre de pôles de la machine./
: Fréquence de réseau (Hz)(r-1)
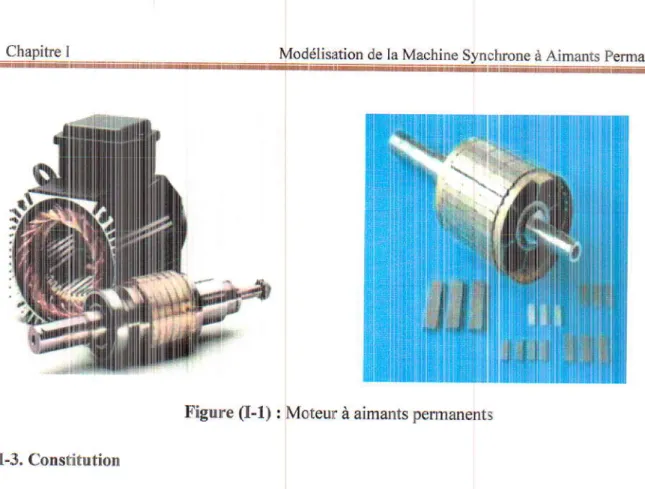
Figure
(I-1)
: Mo'teur à aimants permanentsl-3. Constitution
Le moteur s)mchrone est constitué de deux parties, une parti€
nobile
ou rotor constituantI'inducteur, et une pârtie
fixe
ou stâtor portânt des enroulements constituantI'induit,
La mince zone looalisée entre c€s deux éléments est appelée entrefer.I-3-1.
Stltor
læ stator d'une machine synchrone triphasée est constitué de trois enroulements identiques
décalés de 120' dans l'espace, logés dang les encoches du circuit magnétique fixe. Ce demier est feuilleté afin de réduire les courants de Foucilult et de limiter les p€rtes dans le fer [5].
Figure
(I-2) |
Slator d'une machine synchroneI-3-2.
Rotor
Le rctor : se compose d'aimants permalrents. Les aimants permanents présentent L,avantage
d'éliminer
les balais et les perûgs rotoriques, ainsi que la néccssite d,une source pourfbumir
lechapihe I Modélisation de lâ Machine Synchrone à Aimarts Permanents
coutant d'excilation. C€pendant, on ne peul pâÊ contrôler I'amplitudr: Cu
flux
rotorique.Il
existede nombreuses façons de disposer les aimants au rotor [6]. I-3-2-1.
Aiuants
on surfacePour
cest)TEs
de
machines,les
ajimantssont
plaçéssur
le
rotor,
ils
sont
aimantés radialement, ccmme montre sur la figure (l-3a). Cette configuration du rotor est ia plus utilisée. Le principal avantage de la machine avec des aimants en surface est sa simplicité donc faible coûtde fabrication par rapport
à
d'autre machinesà
aimants.L'incon!é[ient
est I'exposition desaimants permanent$ aux champs démagnétisants. De plus, les aimants sont soumis à des forces
cenkifuges
qui
peuvent caus€rleur
détachem€ntdu
rotor.
Parfoili,un
cylindre
exteme nonfenomagnétique
de
haute conductivitéest
ul.ilisé,Il
protégeles
aimants p€rmanentsde
ladésaimantation, de la réaction de
l'induit
et cles lbrces centrifuges. Ceo)lin&e
peut en plusfoumir
un couple de démanage âsynchrone et agir comme un amortisseur. Dans le cas des aimants du type tenes rares la réactance s)mchrone dans
I'ar€- det
l'axe- q sont, piatiquement les mêmes [6].I-3-2-2. Aimâ[Lts insérés
Comme dles rnachines avec aimants en surface, les aimants du type insérés sont aussi montés sur la surface du rolor. Toutefois, Ies ouvertures entre les aimants pelmanents sont partiellement remplies avec le fer, comme le montre la
figunl
(l-3b). Le fer entre l9s aimants permanents cÉeune saillance et donne un couple réluctant en plus du couple des aimatnts. La réactance synchrone
de I'axe- 4 est légèrement supérieue à cell€ dans
I'are-
d,
I-3-2-3.
Àimârts qrlerrés
Les machines à aimants entenés sont des machines avec des aimants intégds daûs le rotor figure(l-3c) et aimartés radialement. Du fait que la surface du pôle m€€nétique est plus petite que celle du rotor, l'inclrrction dans I'entrgfer estplus faible que I'induction dans l'aimant. La réactance
synchrone dans l'arie-
dest
plus petite que celler de l'axe- 4 Les aimants dans cette configurationsont très bien prcté€És contre les forces canfiifuges. Cette configuration du rotor est recommandée pour les applications à gnndes vitesses.
I-3-2-4. Aimants à concentratiotr de
flux
Une
autr,9làçon
de
placer
les
aimânts pemanents dansl€
rotor
est
de les
entenés profondément à l'intérieur du rotor.lci,
les aimants sont aimantés dans le sens de la ci.conlérencefigure
(l-3d).
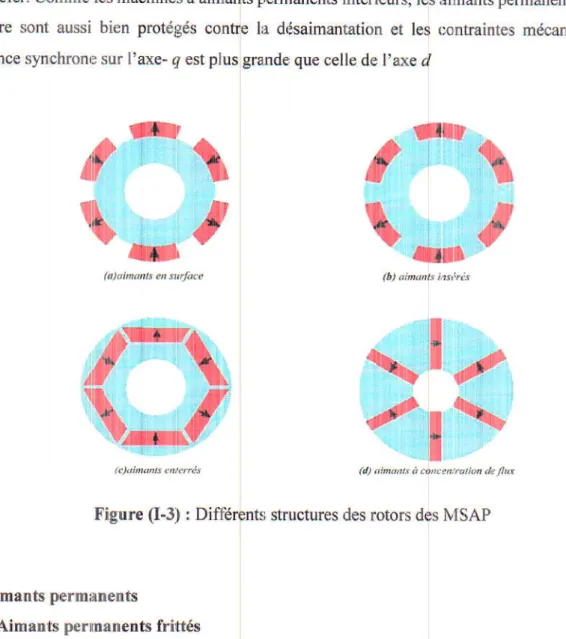
Les pôles magnétiques se fonnent alors à niveau des [,a]fties ferromagnétiques du rotor par concenùation d€flux
provenant des aillrants permanents [7] .Chapitre I Modélis.rtion de la Machine SynrlLrone à Aimants Pennânents
L'avantage de cettg configuration par râppod aux autres est la possibilité de concentrer le
flux
généré par les aimants permanents dans le rotor et d'obtenir ainsi une induction plus forte dans L'entrefer. Comme les machines à aimânts pemranents interieurs, les rtimants permanents de c€tte demière sont aussibien
protégés contrela
désaimantationet
les oontraintes mécaniques. La réaotance s),nchronÊ sur l'axe- q est plus grande que celle de I'axe/
r
It
tllf
tl
It
t\ ll
.Ifr'
t,|
,/'l
q\,
t )<tirkds .'t)'ës (d) lituù.. à c.û.ttrrqxù .t tlû\Figure
(I-3)
: Différentri structures des rotors des IvlSÀPI-4.
Aimants
permanentsI-4-1. Aimàtrts peflmânents
frittés
Les
aimants permanentssont
des
natédaux durs,
camctériséspar
une
polarisation rémanente, un chamLp coercitif d'aimantation, et une énergie spécifiqre ma,rimaleD'un
point devue macroscopique, l'état magnétique d'un aLimant est décrit par trois ./ejcteurs
[7]
:-
I'induction magnétiquer,
-
le champ magnétique 11,-
la polarisation rémanente de l'aimant JLes aimants permanimts que l'on peutrençontrer dans les machines sontprincipalement les f€nites
et les
AlNiCo
et les aimants teres rares :(Le Saûrarium-Cobalt et le Néodyme-Fer-Bore) dont les principales ca.actéristiques sont regroupées (lanlr le tableau (I- I)
de la Maohine chrone à Aimants Permanents
0,35 à0.43
à 130 180 à 400
o,2 à 0,4
Émanent très élevé, mai6 um champ coercitifùÈs faible, ce qui pose de gros problèmes de isation. Ces aimants ne peuvent êtrç sortis de leur
circuit magnetique, sous peine de les
I-4-1-2.
Ferrite
C'est le composant le plus ancien
b
moins cher. Ses perform{mces modestes le canto.nent cependaff dans leri machines de faiblerésistânt à la coraosion, Par ailleurs, ce
massique. C'est
ur
materiau Aès cassant rnaisdes aimants forûement sensibles à Iâ démagnétisation
à
basse tempérâtureet
possedent u24
à36
o,
250
I-4-1-1.
Alnico
Les aimants en Alniço ont un
tsl.
prédisposent pas aux contraintes
Imagei
d'&imantsÀnico
Figure (I-4)
:I-4-13. S.mrrium-Cobelt
est hès supérieur€ à celle des
ferites,
températue
(> 300'C) et
aux charnde la Machine à
Aimdts
PermanenbImrges
d'&im&rts ferriteg
Images
aimorts
terres-nres
même que leur
prix.
Cor4ple tenu de sa bonne tenue eninverses élçvés,
ce
comgo$rmt €st propic€à
c€rtaines formes des aimants pçnnanentsCeux sont l€s Dremiers aimants rares apparus sur le mpnrhé. Leur énergie spécifique
applications
(militaire,
nucleaire...)Ils
dans ce contexte le meilleur compromis enterme de Derformançe face â un envi thermique swère
iel
qucI'on
frouve dans desapplications aéronautiqucs
[l]
14.1-4.
Néodymq'Fer-BoreC'est la version la plus Les progrès constants n3alisés c€s demières années
dans
leur élaboruion,
et
leur
coût exclusivite pour un grmd nombred'
aux
Samarium-Cobah,leur
assurent unequasi-UNV-Jûel
Chapitre
I
Mo,lélisation de la Machine Svùchrone à Aimants PennanentsTechniques recentes de traiûement tendent à. dirninuer fortement I'usurer. Cependant ils sont encore
défavorisés par leur tenue
à
la température élevéeet
dansle
cas dela
haute vitesse Dar une conduQtivité pénâlisante [7].La figure (l-5) donne les courbes de désainrantation des principaux q/F,es d,aimant
tst
i'ti
1.0 o.8
o,'l
o.2
trEutrc
(I-5)
: courbes deI](H)
de différents aimants [7]I-,t2.
Aimânts liésActuellement, les aimants
frittés
sorLfflentd'une forte
sensibilitéà
Ia t€mpératu(eet
decaracteristiques mécanliquÈs déficientes pour certains t'?es d'applicatic,ns (probième de collage et de résistanca aux
sollici&tions
mécaûiqueri). I)ans ce contexte, les aimants liés presentent desatouts en partie dus à leur faciliter d'utilisation et de manipulation, Ces aimants liés oblenus par mélange homogène de pondres d'aimants
et
de matériaux polymèr'es, se distinguent par trois proédés de fabrication domant lieu ?r des rnat{iriaux injectés, comprr}sses ou calandrés. Pour cesdeux demières catégories, le produit final isohope ou anisotrope peut a uoir des formes complexes
grâce à un usinage direct rnoyennant quelqùLes précautions (arrosage pour
limiter
l'échauffement, protection contre la c(,nosion des surfàces uLsinées) [7].I-5.
Càrâctéristiq ue de drésaimrntâtiorLes aimants pemanents sont prinçipalement caractérisés par l€ll| cycle d'hystérésis et plus
particuliàem€nt par
h
couLrbe de désaimantation du deuxième quadrant du plan (figiurel-
6) [8].ffi$
G\__-/.,7
Chapitre
I
Modëlisation de la Machine Synchrone à Aimants Permanentsùoite tu
chane
I
Figure O-6)
:
Courbe,le désaimantation [8]A
partir de cette courbe, on retrouve la valeur de[9]
:r'
L'induction remanente4,
concspondant à I'induction résiduelle en circuit fermé.Ilpeut
êne représenré à la force
d
atraction./
Le
chafip coercitif de I'induction
,I/,.,
qui
est
ie
champ démagnetisant annulantI'induotion, Une valeur élevée indique
u
aimant plus stable et plus résistant./
Le produit d'énetgie volumique 811** . I'lus la valeur est élevée, plus l'aimant est puissantLes valeurs 11.
et
B,
du point de fonctionn€meff optimalM
conespondantà
BI1.*.
I-6. Difffuents tlpes d'alimentation
La m?rchine synchrone peut être alimentée en tension ou en courant. La source
doit
être reversible pour un fonctionnementdù$
Ies quatre quadrants (moteur/ générateu dans les deuxsens de rotation). Les convefiisseurs ahematif/continu de l'électroniqur: ,le puissance, sont utilisés
dans des domain€s d'application varié$, donl le plus connu est sans dcùte celui de la variation de
vitesse des machines à courants altematifs. l,a forte évolution de cette lonction s'est apPuyée sur
le
développement des composantsà
semiconducteurs entièrement commandables, puissads, robustes et rapides[0].
I-6-1.
Alimentation par
utr commutateur dlecourant
L'alimentation de la machinrr doit êffe adaptée aux caractâistiqu€s de celle-ci. Ainsi,
il
sera pÉféré une alimentation en créneaux de courant dans le cas d'une machine qui, lorsque deux de ses phases sont alimentées en série
par
uncourul
constant, possèCe une courbe de couple électromagrrétique C.(d, )de
forme
fpezoïdale
(moteul
synchrot3
à âimants
sans piècesoolaires).
Châpitr€ I Modél isation de lq l4achine
Syncl!r"e34@!lP_99!9g!l
Cette alimentation minimise les ondulations de couple (la superpositicrn des courbes de C'" (9,
)
lors
dcs différentes sfuuencesde
fonctionngmont donne une çourbede
couple pratiquement constant).l-6-2.
Alimetrtation par
un ondrtleur ile teDsiortLa commande d'un moteur slrrchrone p eut se faire aussi à partir d'un convertisseur statlque
alimenté
par
une source de tension continuLe constante. Les onduleurs de tension permettent d'imposer aux enroulements statoriques de lû machine des t€nsionsd'anplinrde
et de fréquenceréglables
en
agissantsur
la
commanded3s
inteffupteursdu
coN/€rtisseur statique (GTO, transistors bipolaire, MOSFET, IGBT, i:tc.),Dans les années 90, le transistor
IGBI
a complètement relancéla
coilstruction des onduleus nécessairesii
l'alimentation des moteurs à ccurant altemâtif as)'nchrones et synchrones. Facile àcommander, sa
grille
étant assimilable à un circuit de charge d'un conrlensal€ur,il
présente lesprincipaux avantages d'un transistor bipolain3, et
il
se prête aussi particulièrement bien à la miseen parallèle,
Pour réaliser un onduleur triphase classique rllimenté par une source de tension continue (munie
d'un filtrage capacitif;, et dont le récepleur est urd€ charge altemative qui se comporle comme une source de courant
(le
stator d'une maohine à courant altematif estindùctif),
on a besoin de 6intenupteurs bidirectionnels
en
courtlnt.
ll
faut
aussi disposer dc,ncde
diodes rapides et performantes, montées en paxallèle inverse aYeo les lransistors IGBT.Cette configuration
pemet
d'imposer aux moteurs des courantsprése
ant une faible distorsion harmonique et conduit ainsi à l'élaboration des systèmes d'entraltements à base de moteurs àcourant
altematif
à
hautes perfomrances.Les
techniquesdites
0\4odulationde
Largeurd'lmpulsions,
Mr4
ou (Pulse Width lvbdulation, Ply.{d dans lejargon an,glo-saxon) sont ùtilisées. Ces stratégies de commande des onduleurs s'.lppuientsul
les perfc,rmances en fréquence de découpage permises par les composânts électron iques utilisés.Chapite I Modél i sarion de la Machine Sf
!q!9l"l4lllqg1g:!!l
I-7. Couple des machiDes synchroDe! à &iDrarts permaneDts On distingue trois typ€s de couple :
I-7-1. Couple de détente
Quand les aimants toument avec le rotcr et passent devant les dentr du stator, ils iencontrent
une reluctance vaxiable qui entralne un coupl3 de
valeu
moyenne nulle que I'on appelle couple de détente ; pour tefter de I'annuler, les en,locher; peuvent être inclinées d'urL pas d'encoche, mais celarend plus
difiicile
I'opération de bobinage,il
est préfé|able d'incliner l3s aimants plutôt que lesencoches [5].
I-7-2. Couple de reluctance
Appelé aussi couple de saillance,
il
est dû aux variations des indu,ttances des emoulements statorique çn fonçtion de la position du rotor.Il
fàut noter que dans lec$
d€s aimants montés ensurface, le
flux
d'induit rencontre la m(ime réluctance quelle que soit lê position du rctor,.il
n'y apas donc pour ces moteurs do çouple de reluçtançe à prendre en compte'
I-7-3. Couple
mutuel
II
est dû à I'intefaction des deux champs statorique et rotorique [8].I-8. Avantages de la
MSAP
Les machines synchrones à aimants pemanents prés€ntent
plusieus
avantag€s par rapport auxautres types de maahines L6l i
)
Puissances massiques importantÊs et élevécs.>
Absence de conlâcts glissants.)
Pas des pertes résistives au rotor ; ce quifacilile
l'évaluation de la chaleur due âux pertesdans la machine. Ainsi,
il
y a strppression d'équipement de refroidissement au lotor.>
Supprcssion des bagues et des ballais, ce qui réduit les problèmes de maintenance.)
Possibilité de supporter des surchar€es lransitoires importante,s et un bon compodement dlnarnique en accélération et enÈeirage->
Crande fiabilité.>
Fonctionnement en survitesse.I-9. Inconvénients de la
MSÀP
Comme inconvénients de la machine sylchrone à aimants permaretts on cite :
Chapitre
I
Morlélisation de la Machine Syrchrone à Aimants Perrnanênts--..i.---)
Coût élevé des aimants.>
Interaction magnétique due au changement de structurg.>
Influence des vibrations et des chocs sur Ia structure de la machine.)
Dirninution de l'aimantation s€lon la loi logarithmique en fono:ion du temps.I-10. Domaires
d'applicâtion
de leMSAP
C'est aiosi que la MSAP peut être
t
ès ûtile dans de nombreus€s applications, comme[6]
:.
Propulsion des véhicules électriqu€s et la propulsion des sous-marins,.
Equipements de technologie del'inlbrmation (DVD
drives),.
Applications de l'énergie de l'éolierure,.
Equipements domestiques (machine à laver le linge),.
Automobiles,.
Outils électriques,jouets, système d,r vision et ses equipem€nts..
Equipements de soins médicaux et de santé (ftaise de dentiste),.
Servomoteu6,.
ApplicationsrobotiquesProduction C'électicité,.
Machines-outils,Rétigérateur
tr.-ffi]
riË-
l,-lf
ï" !r
:?()
,
ls
t_"
#
ffiËITffi
(*:"}
f\t{Ppffi-l
I irtaqùe direcle I lnnclùpe à laver I(a) Compresseur réfrigérateur
et moteul machine à laver
UNV-Jijel
Modélisation de la Machine Sytchrone à Aimants Pennanerts
{c): Lecù;urs ÇD,'DvD cr disqLrc dur dc P('
(e) : Sécat€urs électroniques.
(f): systè
€ éolien.À'iôchinc
(g) :
Nouvdle
génération deslavelinge
(h) : Prototype de générateur à âimantsFigure
(I-'D
:
Principales applications des machines synchrones à aimants permanents Ull,[l2]
(d t : I-cctùtr' vidéo. VCR
I-ll.
Modélisation de la machine synchrone àaimarts permanenk
La mise spus forme d'un modèle mathématique d'une MSAP es: nécassaire pour l'étude de
sa commande qans les différents regimes de fonctionnements transitoire et permaneft.
Afin
de modéliser laM|AP,
on adopte l€s h)?othèses sirnplificatrices usuelles donnees dans la majoritédes références [13].
I-11-1. H]pothJèses
Simplilicrtrices
r'
Lcs
hypiothèses simplificatrices usuelles adoptees dansla
modélisation dela
machine, dorné€s dans la majorité des références, sont :r'
Lelr circFits magnetiques nesoff
pas saturés, oequi
permet d'exprimerle
flux
commefonction linéaire des courants
y'
Lelr pents par courants de Foucault et pæ hystérésis sont négligeesy'
Les couslages capacitifs entre les enroulernents ainsi que l'elTet de peau sont négligés."
La
distribution
de la
force
magnétomotrice crééepar
les enroulementsau
stator estsin usoidple.
r'
Le systètne de tension estéquilibÉ
(:composante homopolaire nulle) [14].I-ll-2. RepÉsqnhtion
de la MSAP dans le système d'axe triphasés a, b, cFidure
(I-8)
: Représentation de ia maahine synchrone à ajmants permanentsdans le repère triphasé (a-b-c)
Modélisation de la Machine Synchrcne à Aimants Permanenls
Le nr odè14 mathématique de la MSAP est similaire à celui de la rnachine synchrone classique
en considérant lps conditions simplificaùices cité€s précéd€mment [ 1].
!!æ!
-!!!!-!-r-!---!!!--!=
iques dans un repère
l,^1
fi
l=ln'1,[,'*]=li
lv.)
Ltd'un enroulement
des phases statoriques its par les phas€s des phas€s shtonques
magn&iques
flux
et courants s'lr:=
1r:=
[?- =
ielle ces équstions
)Eq
Les équationsR"
:RésistanceR,llî,."*f**1a".*)
(r-3)I
f'^l
fr"
o
o1
llo".*1=1r"1;[e]=l
o
n.
o
I)
Lç^)
Lo
o
&l
isation de la Mâchinefixe lié au stator sont décrit€s par :
à Aimants Peflnanents
(r-2)
(r4)
(r-5)4:
Lesp,
: Lesflux
4:
L€s tensi>
Éqo
Lês relations Sous forme respectivement a, ô, cvent sous forme matricielle c{mme suit :
î*
+Lûi,,
+L""i*
+ik
+Lhi,i
+ Lb"i* +ëft
+Lh.i"b+L-i*+Ok
être exprimées par
1t,"11i,,")+lo,*f
lL*
L^
L*l
l=lt*
r"
t'"1
lL-
L*
L*)
lisation de
l.
Machine à Airnaîts PermanentsEn désignant par :
[I""]
: l.a matrice d'induçt4nce du stator avec la position durobr.
[{.-]
: Le matrice Cuflux
de tuiûe dû à 'aimant permanent.L-.Lu
,L,"
: Les inductances propres phases statoriques.L"ù,
L^,
Lb,, Lb,,L*, L,biLesi
rnutuelles enhephases statodques.Dans les équations
(I-4) 0-6),
on que les inductances mutuelles sont syméûies de sorte ). .La valeur de chaque inductange varie en fonction deqne i
(Lù=
Lb"),(L*=L*),
(Lb,=
L"bla Dosition électrique du
rotor,
Lgsi
par phasesL-,Lu,L*
sont maximums loNque I'axe4
esten ligne
avec chaqueL)s
inductancesmrtuelles
L6,L.'L6"
so
à
valeurentre les phases [15] - [16].
maximale lorsque I'axe 4 est à
La matrice des inductances
[l-]
estlr
""1= L"t + L"o-
L,
c^,s(20)-1r""-r,*<ze-?1t
-)L"-
t,cos<ze+4t
L"i-
L,@s(20)
1",)- L,cas(20++')
L,t-
L,crls(2o-+)
f,4"-r,"o"<ze-!t
)r""-t,cos<za)
Ir",-t,*xze*2lr
-- t ,cos(20-!)
-
t,"o"{ze
*!)
-lu"-r,*"<n*!t
-1r""-
r,,cos<ze)4,+
f
",-
t"
cas(20-!)
_l
20-7)
(r-8) (r-e) UNV-Jiel I!I,
7 L.o-
L,î^s(28
rygrgldela]4eghings)mgge!e_44!se4!r&rrye4r
où,
d,
: lnductance de frrite statorique ;,"0
: Terme constant de I'inductance propre dl'une phase du stator !I,:
Amplitude du premier harmonique de I'irrductânce propre d'ùne phatie ;Les
flux
de fuitedt
à l'aimant permanent, vadables avec la position du rotor sont donnés par ;f,
=It
cos(21) dr" =ù
cos(o -2A3)
$,
=/,
cos(g+4,
)
(r-r0)
(r- r
l)
Sous forme
maticielle
on a :la,
",1=
o,cos(d)
co96-+)
cos{e+!)
felle
que[{,*]
: Lamatice
des inductânces mutuelles stator-rotor.>
Equatioû
mécanique :L'Euation
mécanique de lâ machine s',écrit :)f-r
J
+=
c.,-
c,-fo
(I.12)AI
OùL
o=3à
p
C-
: Couple él€clromagnétique (coupl€ moteur).Ç
: Couple de charge (coupleÉsist
nt)./
: Coefficient de frottement.Chapit e
I
Modélisâtion de la Machine Synchrone à Aimants PermanentsJ:
Moment d'inertie,p
: Nombre de paires de pôles.O
: Vitesse de rotation mécanique d€ la MSAP.a,
: Vitess€ électrique du rotor.I-12. Représentation de Ia MSAP dans le s'/stème draxes d,
q
Pour
supprimer
la
non
linéarité
du
système d'équationsdiflërentielles,
on
fait
des ohangements de variables qui réduisent la çomplexité de ce sysême. Danri les machines électriques lriphasées, ce changement de variable consilite à transformer leslrois
€inroulements relatifs aux deux phases à des enroulements orthogonâux (d,q), toumant à une vitesse ar,[],
La transformation la plus connue par les électrotechniciens cst calle de Park. l,€ repère
(d,4)
peut êtle fixé au stator, au rotor ou au champ toumant, selonl'objectifde
l'application[l7].
l-12-1. Modèle dePsrk
Fignre (1-9)
|
Schéma équivalent de la MSAP dans le repère (d,q).tr-12-l-1. Passage
direci
(triphaÉ
au dipha$é)L'Euation
qui traduit le passage dù système lriphasé au système biphasé(dq)
est donneç par :(r-13)
UNV-Jijel
lx*"1=lnretllx*,1
[/d)]
: La mptrice de passage dir€ct deX
: Représentq les variables considéÉ€sXo
: La comppsarte homopolaire, ajde la Machine à Aimants Pennanents
la maclfne (tensions, courants ou
flux),
pour rendre la transformatiol éversible, elle est nulle
(r-
l4)
elle est déIinie
(r-15) (r_
l6)
t:iphasees,,l
'l
'l
lorsque le systÈn€ est en equilibre,
La matrice de Park
[p(d)]est
donnee souJh
forme suivante :_i-,,
-?_T)
_,(,_+)l
Irran=/Jl -srna
:"^('-T)
-"'(,-ij
I
lrr',-'l
LJ2
.12
JZ
JI-12-l-2.
Pasiqge itrvense (diphrsé aut+hâsé)
La aansformée de Park inverse est nécessaire pour revenir aux grândeurs
t:il
par :
Ix*l7ïptrlf'Lx*l
Et la matrice da passage inverse dc
park
[](A)]-'est
donnee par :I
_l :1.r,
_sind
1Ip@)].
=,El."d
e-?+)
-"n(
e-!)
r
trl
\
r./
\
5)
r-de la Machine à Aimants Permânents
I-12-2.
Application
dela
de Pa à laMSAP
En appliquan la transformation de PaIk système équations, on p€ut $xprime. tous les vççteurs
dans un repère lié au rotor.
ApÈs
equations, on obtient un sysême d'équationsimplilie
de la machine synchrone. où lesD
Équations électriques ;de t€nsion sont données Dar :
, dô, _wéo
dt
(r- r7)t';
.
. dû,o- *
rrh
>
f,,quatiotrs magnétiqu€c :Et les
flux
étant donnés par :électromagnélique
pe
rapport à I angle(r-18)
(r-r9)
par
la
dérivée panielle
de
l'énergie rotqtion du rotor comme suit[5]
:(r-20)
I,
,Z,
: lnductances d'axes direct €t en qEn remplaçant les expressions des
flux
/,
et iq le système (I-17) nous obtenons :fn"
=
^.,,*
lY"
=
n"i"*
:rio
-a,
Loinoio+Qt)
> EquatioDs de la
puissmc€ etdu
ple
Le
couple
électromagnâiquec,_
=
.{i-_--.1+,tt
dvtdo,,-
d0
la suivante :Selon Park, I'expression de la puissance
UNV-Jû€l
En remplaçsLnt
V'
V,
par leurs exprcssiqns onaurf
: ,a1r; = 116"
1;,' + ;", )*
<!,ii
t,'
ff
t;
*
ff
<,p,t "-
c"ù\)
*
1p,,(ir'
+ir')
: représente la puissanræ dissipee en pertes Joules dans les enroulements du(t-22)
(I-23)
(r-24)
0-25)
$ator, enroulements du stâtor,*
lqoio-
Ooio) : représente la puissance éledrqmagnétique.Sachant que :
Il
vient :tfu:,"*4,"1:
'dt
représ€nt€ la varirrtiondl
l'energie magnétiqu€ emmagasinee dans les "1=
c-"rY"
cn =:p\.pdtz i
patd)
z'
L'expression du couple électromagnétique en fonctlbn des couranls est comme suit :
c_
=inlrt,,
-
r")1"i,, ûri,)
>
Eqùrtion
du mouvement :Y. r--
(t:26)
Lâ représentation fonctionnelle du modèle de Pârk 4e la MSAP est illustrée sur la Figure
(l-10)
-da
r"
v.
V"
dc la Machirc à Aimants Pelrsnerts
Q-2'1) de la
lr$AP
Figuc
(1-10) :I-13. Schémr
forctionlGl
d€ laMSAP
D'après les équations (I-19), (I-25) et le slstème d'fquations suivant
n8l:
di" |
.-.
ù
Lo'
'
di-
r--!
=--(Y
&
L""
.dn
dt'
Lqrq)d-@@r\
+ûi"f
&Io
+PI
+
-
Lq')i,va+
de Ia MachiûelBllrl
DlIt'l
à Aimants Permanents (r-28) uaFigure
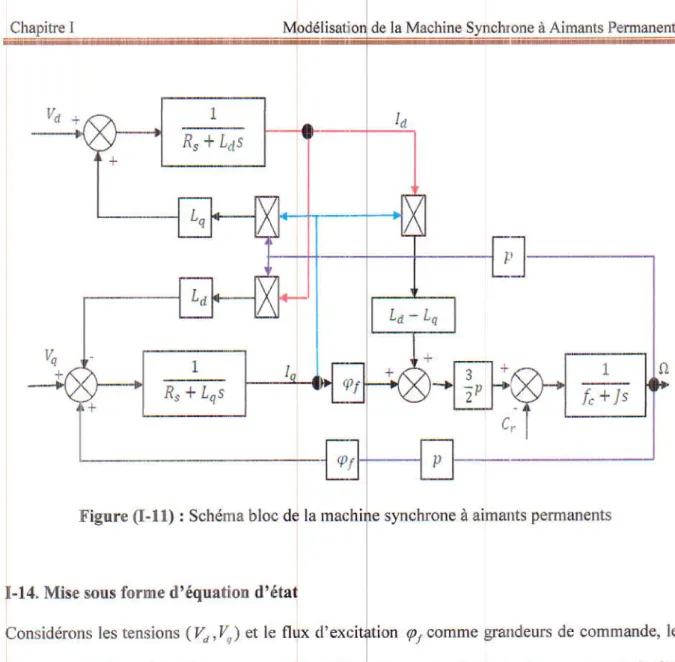
(I-ll)
: Schéma bloc de la machi synchrone à aimants permanentsI-14, Mis€ sous forme
d'équrtioD
d'état
Considércns les tensions (yd,V,t) et le
flux
d'excip/
comme grardeurs de commande, lescourants statoriques ( Id, /a ) comme variable d'état le coupl€ resistant C. comme pertubation.
A partir des équations (l- | 4) on peut écrire l€ sy d'équation suivant
[1]
:txl
tvl
IA]
tBl
tcl
tDl
Jf"l=r,'tr"t
[1r1=
1c11x1.
Vecteur d'état. Vocteur de commande,Matrice fondamcntelç qui caractérise le Matrice d'entrée.
Matrice de sortie.
Matrice de transfert direct.
de la Machine S
Sous forme matricielle on peut ecrire le me
d'
uation (I-27) comme suit :à Aimants Permanents Posons :
t,'ltxl lBllvl
l=lt"
t,lno'"
'rl'
d
Irl
dtL"
t
(I-2e)
t.
TVI
(r-30) (r-31) EtIt:r
]',",
.
'ï",1
t
,llv"
I1-ilLû)
I
ol
,l
"ql
(r32)
(r-33) (r-34) (r-35)'l
4"1---l
'il
LqLl
|
.n.loo
It
t-;4,
L""
l;l
0I
L,
llt;
L;
I n'
L"l
''=l-1,':;l
L
L4
Lq]
On peut écrire la matrice[A]
comme suit :f&
vr=l
t"
L'
Eto
ol
o
-ll'
Lq)
.].;;
0 1 I'qf+
- _
tL,
tBt=l
"LO
UNV-Jijelde la Machine à Aimants Permânents
I-15. Modélisation de
I'a$ociation
convenrsseuAprès avoir présente
lc
modèle dela
machi on présenterale
systèrne d'entrainementcomplet où la machine syûchrone est associee un onduleur de tension lriphase. La figure
(l-121 illusrre le schéma de principe de c€ne as convertisseur-MsAP I I 7].
Ir'o
MSAP
Figure (I-12)
: Schéma de I'a.sso,ciationM
-
Onduleur triphasé de tensionL'onduleur est un converlisseur statiqurl de trarsformer
l
énergie électrique d une sourcedetension continue en une énergie éleclrique t)?e altemative. L'utilisation des onduleursde vitesse pour les moteurs triphasés, les
est très vaste dans I'industrie, tels que les
alimentations de secours...etc.
Gr.âce
au
développement technologique deset
l'apparition
des nouvelles techniqùes de commandes les onduleurs sont plus performants. D'autre part la ft nne de tension de sortied'un
onduleurdoit
être plusd'une
sinusoidepour Ia
ouelle le taux d'harmoniques soit le plus faible possible, c{:tteçommande utilisée
ière dépend largement de la æchrrique de
On distingue plusieurs types d'onduleurs
Il
:.!.
Selon la source : 1llo
2Couurrande de
I'o
UNV-lijelde Ia Mschine à Aimants Permanents
r'
Onduleurs de tension,r'
Onduleurs de courant..!
Selon le nombre de phases (monophe#,.:.
Selon le nombre de niveaur< (2.3. eæ. ..etc.),
I-15-1. Modélisation de
l'ondûleur ttiphsst
de PouI modéliserlonduleur
de tension, onparfaite, supposée d'être de deux générateurs de F
point noté
4,
.M
égaleà
uof2
connectés enh€ eux par unLa
machinea
é1é modéliseeà
partir
des tensions simplesqu'on
note Y,,,L'onduleur est commatdé à partir des $andeurs I transistors (supposée des interupteurs idéaui.), on
S,(i=a,b,c).
On appelle{
S,
-
-1.
alors4
est passantet
{
esr ouven ,9,=-1,alors
4
est ouvertet
4
astDans ces conditions on peut écrire les tensions I/.0 fonction des signaux de commande
S, (i=a ,b ,c) et en t€nant compte du point
fiotif
/l0 sur la figure.l-12 [17].0-36)
. le point neutre du colé ahematif (MASP). alors les tlois ûensiorls comDosées :
si
si
,
/.,
sont définies par les relations suison alimentrtion comme une source
et
l,
les(r-37)
+V^+V^
=Q,p.11;walsnç '
Itt
.-t/
t"^-'*
)rt
--t/
Ilu*'=v"
I,ê charge constituée par la machine estéquilihée
Soit"z
" Vor'Yx
u*1
u'tl
1r*
= ..llu*
t-Yu,=.iLU',
t-,",
=:;tr."
UNV-Jijel0-38)
:
isâtion de la Machine
En faisant apparaltre le point n zo
',, les slons entre phases peuvent aussi s'ecrire :
l';]=:
LV*)
'
*
= V-o -Yo,o*
=V*o'Y^o
=V*+V*o
=4,+V*o
=V^+V.n
[rz-" +rz*"+tz_"]
(r-3e) En .emplaçant(l-38)
dans(l-39)
onDes relations suivantes :
On peut deduire le potentiel enùe les
q40)
-'lf"-"1
-t
llq*o
I 2)Lr-")
q4r)
(1142)L'utilisation
de l'expression(l-36)
d'établir les eqÙations instaffenées deB tensionssimples en
ônction
des $andeuls del',
L_i
(t+3)
L'onduleur a pour objectif de gén à sa sortie, des tensiotls le plus sinusoTdal possiblg à cet effet, differentes st atégi€s de p€rmettant de détcrminer les trois fonctions logiqlres
-1
-'lls.l
2
-1lls,l
-r
2lls.J
de la Machine à Aimants I-15-2.
Commalde
parmodnlatior
s-triangle
La
M.L.l
sinus-niangle est réali par comparaison d,une onde modulant€ basse fidquence (lension de réference) à une onde haute fit4uencede forme triangulaire. L€s mstants de commutation sont détermines par les d'intersection
entre la porteus€ et la modulante. résumé par l'algorithme suivant I
I4
:Donc le principe de cette stratégie peut
Si
V,-1.>Vp =
S,
=
I
Les tensions d€ référenc€s sinusoi.dales
L'équation de la porteùs€ hiangulaire est
Cette technique est caracterisée par
>
L'indic€
de modulationzr
égal fréquence de référencæ-f,
(n
=fo
on
,9,=
O,
l=4
!,
ç, exprimées par :=I/"sin(@t)
-,
J.i
In*,
t:
t
Tp(;
"(^(
^l'
/_ stnt@t-
-l
3Y,sinl.,t++)
J(144)
(i4s)
si
0<r<1
2 T.si-!<t
<Tedeux paramètes suivants :
rapport de
la
fréquence demodulatiot
4
sur
la,f
)tu.
)
Le
coefficient de Églage en/
égal au rapport de l'amplitude de la ûension deréférence
f^
àk
valeur crËte del,
de modulationlz*,Q
=f,/y*).
isaton de la Machine
O tdc
portcr.:
o.oo2 0.oo4
0.()06
0,o.ol
o.o12
0-014 1 -o,a F I 1I
I 1I
I
I
0.018
0.o2tl
.
I 0.8|
0.6 o.4 Io..l
l"[i
o.zI
l'oi
-o.Eo
0.002
0.004
o.(mÊigral MLI .ésuttar
l--
--T--rl
li
i-,
o.qo8
0.0.1
oo12 o.otrr
o.ot6Figur€
(I-13)
: Illustralfon de laMLI
triangulo-sinusoidalesalion de Ia Machine S),nchrone â Aimanrs Permanenrs
è
250r-
-200r
150'
1oo -Or -50 --100 -150 -200 -2æ o.03 Temps(s)Figure
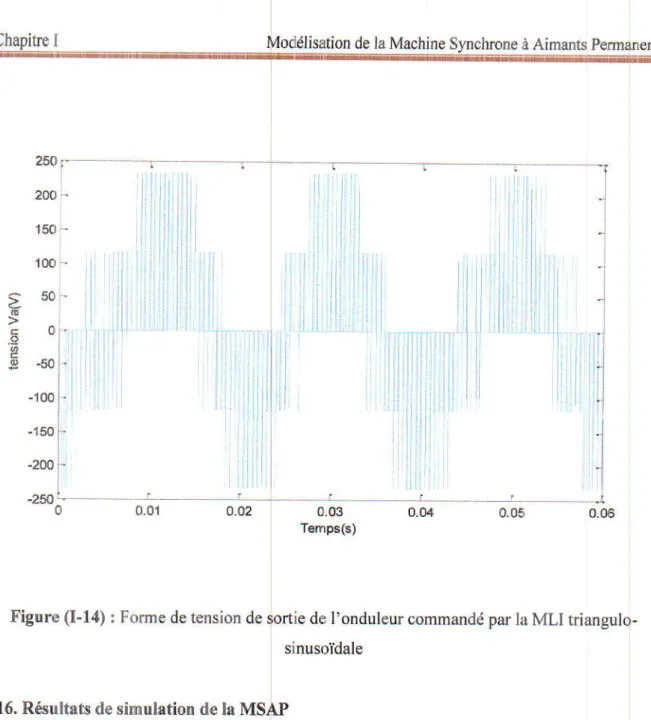
(I-14)
: Forme de tension de sortie de l'onduleur oommandé par laMLI
triangulo-sinusoidaleI-16.
Rêultats
desimulâtion
de la MS-APPour compléter
l'étude
théorique présentée précédemmenqla
première application, du modèle de la machine synchrong à aim4nts permanents est sa mise en æuvre dans un bloc de simulation numérique pour un démarrage direct sur le réseau (220l380V) rriphasééquilibÉ
de ftéquence fixe 50H2,La simulation a été effectuée sous lf environnement
MATLAB/SMULINK.
Les Daramètresde la machine sont indiqùés au niyeau de I'alrnexe
A,
La Figure (l-15) pésente le schéma bloc de la simùlâtion de la machine synchrone à aimants pennanenls,
0_et o.(n
0.01
de la Machine
Figure (I-15)
: Schéma bloc dela
(machine synchrone à aimants peûnaneats)>
Démerpage àvido
En
première étape, ona
simulé lecouple de charge). La
Figue
(I. I 6)de la
MSAP à vide
(sans application du les lésùltats de la simulatioa[5]
[15].--I
il
:-il
de lE Machine à Aimantr Vitess€
-h
-illr
^
r6oti irÉ
-È.ll;r€
"liltrÈ
.ll
t€Nlps(t a) vit€sse de mtatiot Couatrt ld tarys(9c) coùrant i,/ d) cou.ant ie
Figure
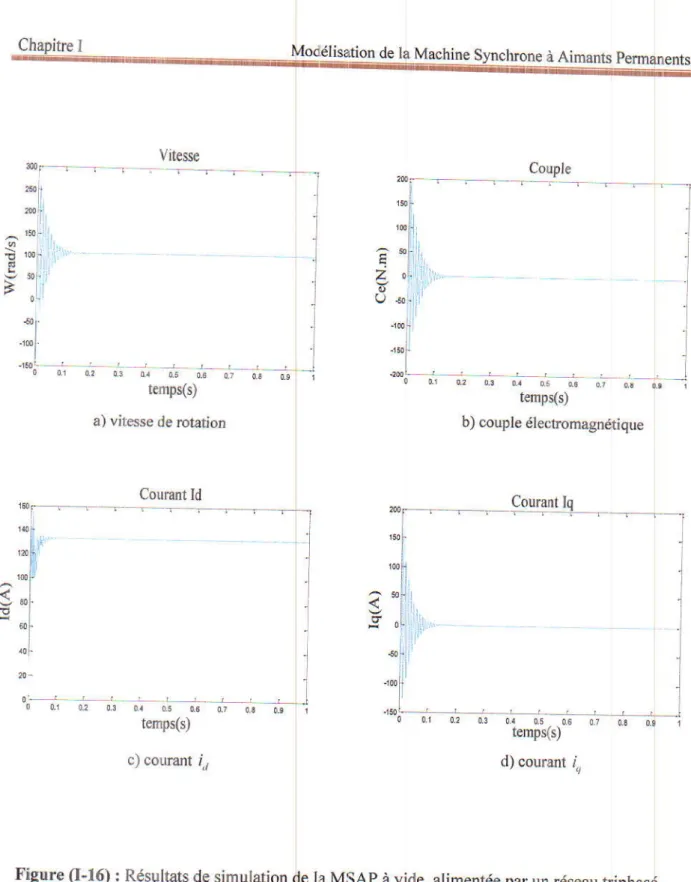
g-16)
: Résultsts de simulation la MSAP à vide,alimentê
par un réseautri
équilibré, (a) : viress€ de mtarion, (b) : électrorng#tique, (c) : coursrt
t
, d) : coùrdru ,,e
O-Ïl
fl
l
___-
ùû3Mùa4,t
l
I t€rtrps(s) r. 15 r! à-7 M hmps(ù UNV-.Jij€lModélisation de la Machine à Aimants Pemaûents
>
Démarrrge
en chnrgeEn deuxième étape, on a simulé
d'un
couple de charge(Cr=10 N.m)
simulation
[
5].Vitess€
de la MSAP en chatge (avec application
(t=o.s
s)).L1 Figure (I.17) illustre les
résultats dela
Couple
t€rnps(s.)
b) couple élecaomsgnétique
èo
È
'"à
;i., ,fi
d-ôir
i,
*.
o! or d! rt
:\$
zol
,,
I'l
iool 1"1Îl
renps(s) a) vitess€ do rotation Counnt Id tenps(t c, counrnt rr' temps(s) d) couranti{
Figure (I-17)
: Résultats de siéquilibré
(Application
d'un couple dei'
de la MSAP à ]vide, alimentée par un réseau triphssé
harge
CFIO
Nl,m), (a) ; virÊss€ de rotatioD, O) : coqple, (c) : coulallt id , d) : couEnt L
_c#4'sg9!
d"_!c1499!!9!Egs!9è_Ar'ry!E
!eg3se{l.
I-17.
Interprétation
d€sresultah
>
Démarrage àvide
On remalque que :
Pendant
le
régime transitoire,la
vitesse est fortement pulsatoire, présentant au premier instant de démârrage des oscillations impoftantes, et atteiût sa valeur 104 mdlsec est égale à la vitesse dç synchronisme puisqu€ le moteur possède 3 pôles.L'allure de la courbe du couple présgntr aùssi au démar.age d€s oscillations importantes dans un intervalle de temps court, puis se stabilisé à zéro puisque la machine est à vide.
Pou. les courants
ià
et
ia
av début de démanage onvoit
des pics de courant assezimportânt et cela s'explique par la F.E.M qui est due à une faibl€ vitesse de démarrage, ensuite
ils
se stabilisent à leurs valeurs nominales après un temps assez court,>
I)éErrrage
en chargeon remarque que l'application de 1ê charge entrain€ une variation de vitesse pendantun
bref
de temps, puis elle se stabilise à Ia mêm€ vâleur qu'avant, alors que le couple électromagnétique
augmente pour compenser la charge appliquée et se stabilise finalement à la valeur du couple de charge.
I-18. Conclusioù
Dâns c€ chapihe, on a modélisé la machine synchrone à aimants permanents en utilisant le
modèle de Park, le modèle devient plus simple et les non linéarités sont réduits. Ensuile on a
modélisé le convertisseur statique et sa çomrnande. Et en demièrc parti€, on a simulé le modèl€ de la MSAP alimenté par une source parfaitp à vide puis en charge.
D'apês les résuhats de simulation obtenus, les réponses sont très rapides et stables mais on
remarque
que
les performancesne
sont pas bonncs surtoùt au démarrage. Pourobtcnt
des performances statiques et dynamiques élevées on s'intéresse dans le chapitre suivant au principe de la commande vectori€Ile.Ch
pitr
il
vectorielle
ela
achi
e
Synchrone
\€ctorielle de la Machiûe S
II-1. Introduction
Comme le modèle de la machine sl,nchrone que nous avons présenté au chapitr€
(l)
est un
sysieme multi-væiable, non linéaire et en pius il est fortement couplé entre les variables d,enhées
(tension, fréquence), les variables d9 sorties (couple, vilesse) et les variables internes de Ia machine
comme Ie
flux,
la commande donc de lamachine est di{frcile.Pour contrecarer cette
di{Iiculté
et
pour obtenir une situationEuivalente à
celle de la rTtachincà
courant continuà
cxcitation séparée, Blaschkect
Hassecn
1972, onr proposc unctechnique de commande dite commande yectorielle appelée aussi commande pa.
orieffation
deflux
FOC(Field
Orienred Control).L'idéÈ
fondarnentale de cette stratégie est d,assimiler lecomportement dc la machine synchrone à celui d,une machine à courant continu.
c,€sÎ-à_dire un
modèle linéaire et découplé ce qui permet d,améliorcr son compo.tement dynamique [19]. Ce chapitre donc presente la commande vectorielle appliquée
à
la machine synchrone àalmants permaneûts. Les boucles des côwants et la boucle d€ vitesse sont
régulées à l,aide de correcteurs classique PI.
II-2.
Principe de la commande vectorielleLa
commande vectorielle, consiste à régler leflux
par une composante du courantet
le couple par l'auhe cohposânte.Il
faut donc, choisir un système d,axe d, q et une loi de commande qui assurc le découplage duflux
et du couple.La straûegie de commande laplus souvent utiiisée est celle qui consiste à maintenù le cou.ant 1,
à
une valeur nulle.
Cette stratégie pemtetde simplifier
la
commande
du
cor.rpleoar
lalinéarisâtion de la relation entre le couple et l,: courant [19].
lI-3.
Strategie de commâDde vectorielle de laMSAP
Le modèle de la maching synchrone à aimants permanents alimentée en tension est donné par les équations suivantes [6] :
vectorielle de Ia Machine
.li
1=G"Iq+
L4:)+
@tLqrd+pr)
v,, = \R" rq+ L4;)
+ @(L,rd+c
",, =!
<zl,-
r."1r,r,*
6,t"r
(Ir-l)
Vo=iaLnl"
v" =',p.".t.*'dl
t.!t
*.6,
c".
+tpil"
t
ff=c".-c,-to
Commo le
flux(r/
est constant, le coupl$ électromagnétique est dircctemeût proportionnelà
Ia
V"=6"I"po$1-ot"r"
dl
Donc :
La figurÊ suivant€ rcprésentc te principe
ile la commande vectorielle
(rr-2)
(rr-3)
t
ff=c"4-c,-ro
Commande \ectorielle de la Machine S
Nous pouvons femarquer, que le couple est proportionnel au courant, donc le modère de la machine se réduit à celui d'une machine à courant continu à excitation indépendante :
[6]
Rs +
re,s
,f+./.s
-Fignre
0I-2)
:
Modèle de la MSAP lorsque{
nulDonc, L'avantage de cette commartde lorsque nous imposant i7 nul, est que le modèle de lâ
machine synchrone à aimants permanenb elit devenu linéaire et monovariable et ceci rend cette stratégie
de
comnandetres
attrayantepour les
concepteurs industrielsqui
sont
habitués à cornmander des MCC [19].II-3-1.
Decouplage par compensationLes
lois
de commande vectorielle des machines alimentées en ten$ion présentent des couplages entre les actions sur les axes << d n et(
q),
On a les equations suivantes ;lq
iPta
:Li
(
4)
La
commande d'un courant est donc liensibreà la
variation de I'autr€,.ce
couprage quiconstitue lrune des difficultés de la command€ vectorielle peut être éliminé par une méfhode de
comp€nsalion classique. Celle-ci consiste à faire réguler les deux courants
{
et d en négligeant les termes de couplage, ces dçmiers çtant rajoutés à la sortie des correcteurs atin dbbtenir les tensions de commande [ 1].DéIinissant deux nouvelles variables de commandes ( fdt )) et
(
%r D comme suit :fv"
=
e"
t" *
t,
*4>
-..t".t"
lr,
=e".i"
+ z"ffl
* @e:id
+ô)
veotorielle de
(rr-s)
r
lv"
t"
t-, Les courans <|
Et
f>et<1>sonr
eue de
{
. Leurscxpr$sionr
s'écriventf.
sorlt elors t€nsions fdel
ia.er
]---+l
Les suivante :Yre(tr-3):
Vo=l/^-eo
Yn=for+"0
=z"fr+4.r"
=t"ft*4.r"
= ot,Lnln = a.(Ldld+i)
Le courad .lr ae dépend que de
Z,
etdne
la façon suiyanûe :
It'=
'*
)
l,
"
n,+L'
v.,
t'"=&-""
à partir d€s
tasions
(
Y^> et<1tt> Fela
i - --
![Figure O-6) : Courbe,le désaimantation [8]](https://thumb-eu.123doks.com/thumbv2/123doknet/14676979.742618/23.892.127.801.30.472/figure-courbe-désaimantation.webp)