Bead Manipulation to Enable Electrically Controlled Wire
Braiding
by
Alexxis Isaac and Makai Cartman
Submitted to the Department of Mechanical Engineering
in partial fulfillment of the requirements for the degree of
Bachelor of Science in Mechanical Engineering
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
MASSACHUSETTS NSTITLITE OF rECHNOLOLGY
JUN 2
4
2015
LIBRARIES
June 2015
Massachusetts Institute of Technology 2015. All rights reserved.
Signature redacted Signature redacted
Author'.
.
Department of Mechanical Engineering
May 14, 2015
Certified by
...
Signature redacted
. . . .
Cullen R. Buie
Assistant Professor of Mechanical Engineering
Thesis Supervisor
Signature redacted
A ccepted by ...
Anette Hosoi
Undergraduate Officer, Professor of Mechanical Engineering
Bead Manipulation to Enable Electrically Controlled Wire Braiding
by
Alexxis Isaac and Makai Cartman
Submitted to the Department of Mechanical Engineering on May 14, 2015, in partial fulfillment of the
requirements for the degree of
Bachelor of Science in Mechanical Engineering
Abstract
Litz wire bundles are highly effective at enhancing the current carrying capacity and limit-ing the losses of electronic devices up to MHz frequencies due to the pattern in which the individual wires are braided in the bundle. However, the technology to fabricate Litz wire bundles at higher radio frequencies has not been developed due to current manufacturing limitations. Litz wire bundles developed to accommodate higher radio frequencies would have a tremendous impact for electronic devices because these bundles would allow for inductors to be manufactured with increased quality factors from the current range of less than 10 to a possible range of up to 1000 at frequencies of 1-10GHz. This would allow for less spectral crowding, jamming, improved power handling, and more efficient systems.
In this thesis, through collaboration with The Charles Stark Draper Laboratory, dielec-trophoretic and driven fluid flow bead manipulation methods were explored for the purpose of demonstrating the plausibility of controlled litz wire braiding at a nano-to-micro scale. Results from this thesis show that both dielectrophoresis and driven fluid flow are viable methods for bead manipulation and should be further developed to enable fabrication of "NanoLitz" wires.
Thesis Supervisor: Cullen R. Buie
Acknowledgments
We would like to thank our advisor, Prof. Cullen R. Buie, for his support in our completion of this thesis -especially at a time when we needed him most. We have both been lucky enough to have you as a professor during our time here at MIT and we appreciate the time that you took out of your schedule then and now to accommodate for our needs.
We are also especially grateful to our mentor, Amy Duwel, for being a constant source of advice for us, both academically and personally, over the time that we have been blessed enough to know her. You have done so much for us since we first interned at The Charles
Stark Draper Laboratory with you and we are so thankful for all of your generosity. Lastly, we would like to acknowledge Alisha Schor for all of her support in our un-derstanding of the material and fabrication of the demo. You created an open space for us where we felt comfortable approaching you with questions and we are very grateful for the time that you sacrificed to help us reach our goal.
Contents
1 Introduction 13
1.1 Nano-Litz Wire Bundles . . . . 13
1.2 Goals . . . . 15 1.3 Requirements . . . . 16 1.3.1 Wire Stiffness . . . . 17 1.3.2 Viscous Force . . . . 18 1.3.3 Electric Control . . . 20 1.4 Thesis Layout . . . 21
2 Dielectrophoretic Bead Manipulation 23 2.1 Physics of Dielectrophoresis . . . 23
2.1.1 Dielectrophoretic Force . . . . 24
2.1.2 Positive DEP vs. Negative DEP . . . 24
2.2 Channel Design . . . 25
2.2.1 Spoke Electrode Configuration . . . 26
2.2.2 Point Electrode Configuration . . . 27
2.3 Numerical Model . . . 28
2.3.1 Force and Dynamic Model . . . . 29
2.4 Results . . . . 30
2.4.1 DEP for Nano-wire Braiding . . . . 30
3 Bead Manipulation via Fluid Flow 33 3.1 Fluid Flow Dynamics . . . . 33
3.2 Platform Design . . . 34
3.2.1 Initial Platform Prototype . . . 34
3.2.2 Gate System . . . 35 3.2.3 Final Design . . . 36 3.3 Experimental Setup . . . 38 3.3.1 Platform Fabrication . . . 38 3.3.2 Experimentation . . . 39 3.4 Results . . . 39
3.4.1 Driven Flow for Nano-Wire Braiding . . . 41
4 Conclusions and Future Work 43 4.1 Summary of Results . . . 43
4.1.1 DEP Manipulation . . . 43
4.1.2 Driven Flow Manipulation . . . 43
4.2 Future Work . . . 44
A CAD of Platform Design 45
List of Figures
1-1 Example of a litz bundle comprised of nine wire strands (image excerpted from [5]). . . . . 1-2 Overall setup concept -independent of proposed platform geometries. . . .
1-3 Cantilevered beam undergoing a small deflection (image excerpted from [10]). . . . .
1-4 Cross-section of an open rectangular channel (image excerpted from [6]).
1-5 CD versus Reynolds number for a smooth, spherical sphere (image ex-cerpted from [3]). . . . .
1-6 Force diagram illustrating the relationship between overall force and the
viscous and bending forces. . . . .
2-1 Particle polarity for pDEP vs. nDEP (image excerpted from [14]). 2-2 Spoke electrode geometry integrated into a six-channel system...
2-3 Point electrode geometry integrated into a six-channel system... 2-4 Point electrode geometry integrated into a six-channel system (image
cerpted from [9]). . . . .
3-1 Machined version of the initial prototype. . . . .
3-2 Schematic representation of the balloon gating system. . . . .
3-3 Final platform design. . . . . 3-4 Final channel geometry. . . . .
3-5 Each type of acrylic part used and the overall platform assembly. . . . 3-6 Schematic of the electrical circuit. . . . . 3-7 Balloon gating system integrated into the platform channels. . . . . .
. . . 25 . . . 26 ex. . . . 35 . . . 36 . . . 36 . . . 37 . . . 38 . . . 39 . . . 40 14 16 17 18 19 20 27 28
3-8 In-lab experimental setup. . . . 41
3-9 Soft lithography layering process. (image excerpted from [15]). . . . 42
A-1 Solidworks drawing of the top wall, where the braid wires are joined. . . . 46
A-2 Solidworks drawing of the side walls, which hold up the overall structure and the top w all. . . . 47
A-3 Solidworks drawing of the outer ring of the structure. . . . 48
A-4 Solidworks drawing of the outer ring of the structure. . . . 49
A-5 Solidworks drawing of the platform sections. . . . 50
A-6 Solidworks drawing of the base plate. . . . 51
A-7 Image of the overall structure. . . . 52
List of Tables
2.1 Factors that influence pDEP versus nDEP. . . . 25 2.2 Table displaying the time required for a 1 mm diameter bead to travel down
a 25 mm channel for various bead-medium combinations, assuming a high-frequency electric field. . . . 30
2.3 Table displaying the time required for a 1 pum diameter bead to travel down a 25 prm channel for various bead-medium combinations, assuming a high-frequency electric field. . . . 30
Chapter 1
Introduction
Litz wire is a bundle of thin individual wire strands that are braided together in a prescribed pattern [1]. These patterns typically involve several levels of braiding and twisting, which are designed to enhance the current carrying capacity and to limit losses seen at frequen-cies below the MHz range [1]. Figure 1-1 illustrates an example of a litz bundle comprised of nine wire strands. Although litz bundles would have a huge impact at higher radio frequencies, these bundles have not been pursued at those frequencies because the tech-nology to make them at the appropriate scale is not currently available [5]. The Charles Stark Draper Laboratory and a Harvard University research team are now collaborating to develop "NanoLitz" wires.
1.1
Nano-Litz Wire Bundles
The team envisions NanoLitz to be a 3D braided wire bundle that leverages nano-scale features constructed in a micron-to-millimeter scale component. The overarching goal is to achieve ultra-low loss radio-frequency (RF) performance [5]. With the technology that is currently available, typical RF inductors have a quality factor Q < 10. However, with
access to NanoLitz technology, engineers would be able to produce inductors with quality factors approaching
Q
= 1000 at 1-10 GHz [5]. The quality factor is a dimensionless number that represents the energy being stored in a circuit compared to the energy that isFigure 1-1: Example of a litz bundle comprised of nine wire strands (image excerpted from [5]). thermally dissipated: QOL Q =w0 L (1.1) RDC'
where wo is the frequency, L is the inductance and RDC is the equivalent resistance [4]. For an inductor, as the frequency of a given system increases, the equivalent resistance of the system also increases due to the skin effect [4]. The skin effect is the inclination of current to distribute more densely at the outer surface, or "skin", of a conductor as frequency increases [2]. The higher the frequency, the smaller the skin depth, which causes the effective cross-section to decrease [2].This leads to a decrease in the
Q
factor, and thus a decrease in the overall efficiency of the system [4]. NanoLitz would enable a reduction in the losses caused by the skin effect. These low loss components would provide better filters to address spectral crowding and jamming, as well as improved power handling for thermally robust portable and miniature systems [5].The NanoLitz team has proposed to fabricate wires using a nano-wire scaffold for cop-per with silica insulation. The team has anticipated two main production challenges in creating the NanoLitz wires: (1) the current approaches to conducting wire fabrication are not scaleable to the 0.6-2pm diameter size needed for radio-frequencies ranging from 1 GHz to 10 GHz, and (2) the current approaches to wire braiding leverage macro-scale machines that impose tension and bending forces that are incompatible with braiding nano-to-micro-scale wires [5].
two technologies to braid the custom nano-wires. The first method is a "Self-Assembly" approach that relies on the specific binding properties of DNA to enable controlled wire braiding [5]. The second method is a "Directed Assembly" approach where the wire ends will be attached to beads that will then be manipulated in such a way that will enable controlled wire braiding [5].
The purpose of this thesis is to explore the directed assembly method that was proposed
by the NanoLitz team at a macro scale. From this exploration at a larger scale, a
recom-mendation would then be made to the NanoLitz team to frame their efforts as they enter the first phase of the fabrication of 1-10 GHz range litz bundles.
1.2 Goals
In order to properly explore options for the directed assembly method, three main goals were identified:
1. Explore bead manipulation options that can enable wire-braiding at a micro scale.
2. Perform calculations to determine what settings are required for each option to pro-duce the required force to perform wire-braiding.
3. Create a macro-scale demo of one of the options that illustrates controlled wire
braid-ing.
The NanoLitz team proposes to develop novel assembly technologies that can be scaled to the application of low loss RF conductors. The program goals for NanoLitz will be to braid ten's of threads of approximately one prm diameter wires that are approximately one cm in length. The team would like to focus on fundamental technology development rather than engineering of fully scaled up manufacturing.
The demo that will be covered in this thesis will serve as an intuitive design tool that the NanoLitz team engineers will utilize to be able to visualize the 3D geometry of a possible platform option, as well as visualize the braiding of three wires. This will allow the design engineers to adapt the platform to manipulate ten's of threads of wires and smaller beads. This demo will serve useful as it is hard to capture the braiding mechanics in a CAD tool.
1.3
Requirements
The basic platform configuration that is considered in this thesis involves a series of radially symmetric channels. The concept behind the basic platform design is that each bead will be attached to the end of an individual wire. A collection of wires will be fixed together at one end at a prescribed height above the channel platform. This setup is shown in figure
1-2. 7 / yxx' (1)
K
(3) (2) (4)Figure 1-2: Overall setup concept -independent of proposed platform geometries.
The two bead manipulation methods that are explored in this thesis are dielectrophoretic manipulation and driven fluid flow. For both of these bead manipulation options, the plat-form is designed such that a constant fluid level can be maintained in the channels. The beads will be manipulated by an externally applied force that allows for the travel of each bead to be electronically controlled. Outlined below are the three main requirements that were identified to make wire braiding possible.
1.3.1
Wire Stiffness
In order to braid a set of wires, each wire must be deflected to a certain amount that varies as the braid grows. To understand the force required to overcome the wire stiffness and bend the wire, a wire made of certain length L, diameter D, and modulus of elasticity E can be modeled as a cantilevered beam [10]. For small deflections, a relationship between the deflection of the wire and the applied force F can be represented based on Bernoulli-Euler beam theory [10]:
3EI 2EI
F = 3 = 2 0max 0 (1.2)
where I is the moment of inertia of the beam.
--- a
- --- max
---F
Figure 1-3: Cantilevered beam undergoing a small deflection (image excerpted from [10]).
For large deflections however, like the ones required to braid a wire, a deeper analysis
must be performed on a vertical cantilevered beam. In reference [10], a model was devel-oped to simulate a beam undergoing a large deflection. In this analysis, the bending force that is required is defined as:
a 2
EI
Fbend = 2 , (1.3)
where a is a parameter defined based on the bending angle and is described in more depth in [10]. Based on this model, the force required to bend copper wires made of length
L = 10cm and diameters D =1mm and D = lyt through a 90' turn are estimated to be
1.3.2
Viscous Force
In addition to overcoming the wire stiffness, the chosen applied force must also overcome the viscous force of the fluid that is within the platform. When a spherical particle that is submerged in a fluid medium begins to move with a certain velocity, it experiences this viscous force. In this thesis, the viscous force is explored in two different regimes: typical laminar flow and Stokes' flow. For an open channel flow like the one described in figure 1-4, the laminar flow regime applies when Re < 500 and the Stokes' flow regime refers
specifically to flows with Re < 0.1 [8] [16]. The Reynolds number, Re, is defined as
Re - u, (1.4)
where u is average velocity of the fluid traveling through the fluid, R is the hydraulic radius, and v is the kinematic viscosity of the fluid [6]. The hydraulic radius is defined as follows:
A
R = (1.5)
Pw'
where A, the cross-sectional area and Pw, the wetted perimeter, are defined as [6]:
A=WD (1.6)
Pw = W + 2D. (1.7)
Frce surface
/n
IL)
As can be inferred from equation 1.8, laminar flow occurs when the following condition is met:
500v
Ulaminar < R (1.8)
. Likewise, Stokes' flow applies when:
0.1V
Ustokes< R (1.9)
The drag on a smooth, spherical isolated particle in the laminar flow regime is defined
by
Flaminar 2 -pu247rD2CD,
2 (1.10)
where p is the density of the fluid, u is the velocity of the particle, D is the diameter of the particle, and CD is the drag coefficient or the particle [16]. The drag coefficient for a smooth, spherical particle varies with the Reynolds number.
1000-0 E 100 -c 0 E10 0 0.1 M 0. C) 1 10 102 103 101 106 10 R, = Reynolds number
Figure 1-5: CD versus Reynolds number for a smooth, spherical sphere (image excerpted from [3]).
Stokes' Law assumes that a smooth, spherical, isolated particle is moving in the Stokes'
1 104 ,.I I ! ! I !:! I -I I if 1 m ill ... ... ... .... HIM 1 11111111 11 t m Z -IM 1E-1 1111111 11 1 111111 ME
flow regime. Given these assumptions, the drag force is defined as:
Fstokes = -67rpRu (1.11)
where p is the viscosity of the medium, R is the radius of the of the particle, and u is the velocity of the particle [12].
1.3.3
Electric Control
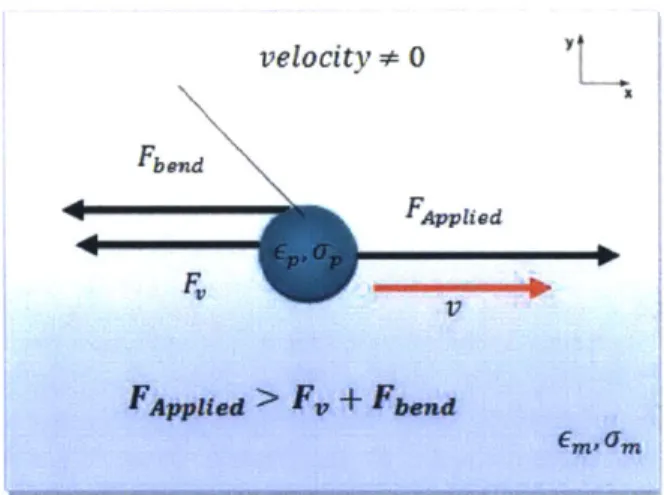
The overall force applied to the system needs to overcome both the wire stiffness and the induced drag force.
FaVVied > Fend + Fiscous (1.12)
Figure 1-6 below displays a force diagram illustrating the relevant forces. For the macro
velocity* 0
Fband
FA
V
F~ p p li d > F , +E wbe m
Figure 1-6: Force diagram illustrating the relationship between overall force and the vis-cous and bending forces.
scale exploration that will be performed in this thesis, equation 1.6 results in:
a2EI
Fapplied > a2 + +12I pu2 4rD2
CD.
For the nano-to-micron scale application of the NanoLitz team,
a2EI
Fapplied > + 67,rpRu.
(1.13)
This thesis requires that the total applied force must be able to manipulate the bead from one channel end of the platform to another channel end in such a way that path of travel can be controlled electronically. This can be achieved in two ways depending on the chosen bead manipulation approach: (1) control the applied force directly, or (2) block the channels and control when each individual channel is opened.
1.4 Thesis Layout
In this work, two possible directed assembly bead manipulation methods, dielectrophoresis and driven fluid flow, were evaluated at the macro scale. Chapter 2 discusses the physics behind dielectrophoresis, how this method could be applied to bead manipulation for wire braiding at the macro scale, two proposed channel designs, and how the dielectrophoretic force was modeled for the channel designs. Chapter 3 discusses the physics behind driven fluid flow as well as the design and fabrication of the demo driven fluidic device. Chapter 4 provides a conclusion of the two proposed braiding methods and evaluates how these methods could be applied at the micro-to-nano wire braiding scale that the NanoLitz team proposes.
Chapter 2
Dielectrophoretic Bead Manipulation
Dielectrophoresis is a well-known technique commonly utilized for the manipulation, sort-ing, and assembly of wires, cells, and micron scale components [5]. It is proposed that with proper channel geometries, dielectrophoretic manipulation of macro, or millimeter, scaled beads can be exploited to enable the controlled braiding of complex litz bundles [7].
2.1 Physics of Dielectrophoresis
Dielectrophoresis (DEP) occurs when a dielectric particle experiences a force due to be-ing exposed to a non-uniform electric field [13]. Dielectrophoresis occurs because the non-uniformity of the electric field causes the dielectric particle to become polarized [13]. Consequently, the pole that is exposed to the stronger electric field dominates the pole that is exposed to the weaker electric field, which causes the particle to move [13]. This electric field can be generated with either AC or DC current sources, and the phenomenon occurs in a wide variety of electrode configurations [11]. All particles, even un-charged particles, exhibit some sort of dielectrophoretic response to non-uniform electric fields [11].
2.1.1
Dielectrophoretic Force
The strength of this dielectrophoretic response depends on the overall dielectrophoretic force that the particle experiences. This force is defined as
FDEP~ 27Emr3Re(KcAI)VE 2 (2.1)
for a spherical particle with radius r that is submerged in a medium with permittivity 8 that has been exposed to electric field E [8]. For this geometry, the Clausius-Mossotti factor can be defined in terms of the complex dielectric constant of the particle and of the medium
[8]:
E* E*
KCm P m (2.2)
The complex dielectric constant is defined as:
E* E + , (2.3)
where E is the permittivity of the particle or medium, o- is the conductivity of the particle or medium, and w is the angular frequency of the applied electric field [8].
2.1.2
Positive DEP vs. Negative DEP
A key aspect of DEP that is commonly exploited for the purposes of particle manipulation
is the directionality of the dielectrophoretic force. When a dielectric particle becomes po-larized in a non-uniform electric field, the particle can behave in two different ways: (1) the particle is attracted towards the direction of increasing electric field and thus is experienc-ing positive DEP (pDEP), or (2) the particle is attracted towards the direction of decreasexperienc-ing electric field and thus is experiencing negative DEP (nDEP) [11]. This phenomenon is illustrated in figure 2-1.
In order to utilize DEP as a bead manipulation for the purposes of this thesis, is im-portant to understand how to induce pDEP versus nDEP. Positive DEP occurs if the fluid medium has a higher polarizability than the particle, whereas negative DEP occurs if the
Neutral Neutral
body body
Positive N e" tive
DEP DEP
Figure 2-1: Particle polarity for pDEP vs. nDEP (image excerpted from [14]).
fluid medium has a lower polarizability than the particle [11]. The polarizability of both the fluid medium and the particle are affected by the frequency of the electric field [11]. The effect of the frequency can be understood through how frequency alters the Clausius-Mossotti factor. Table 2.1 below summarizes how frequency and relative permittivity and conductivity of the particle and fluid medium effect the Clausius-Mossotti factor and,
con-sequently, the directionality of dielectrophoresis.
- Low Frequency High Frequency
E* a dominates E dominates
K I u> m-pDEP E > Em -pDEP
C >m>p nDEP Em> EpfnDEP
Table 2.1: Factors that influence pDEP versus nDEP.
2.2
Channel Design
The main purpose of the two geometries that are proposed in this thesis is to design a platform where one-millimeter dielectric beads can be manipulated by DEP to follow a controlled pattern. The strength of the DEP force is dependent on the geometry of the electrodes, as the electrode geometry directly influences the magnitude and gradient of the electric field [7]. The basis is that each dielectric bead in the channel platform can be ma-nipulated by both positive and negative dielectrophoretic forces. These forces are induced
by the electrodes of a certain geometry that are individually connected to a
computer-controlled interface. The motion of the beads in the channel platform causes the wires to be woven into the specified braiding pattern.
2.2.1
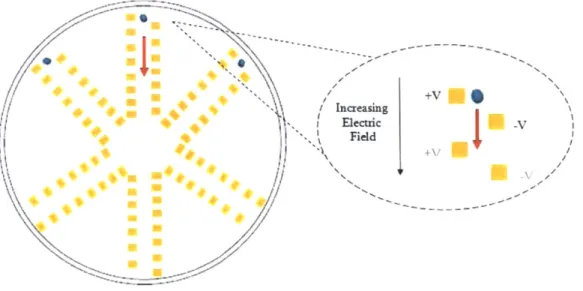
Spoke Electrode Configuration
The first geometry that was explored is composed of rectangularly-shaped electrodes that are 45 mm in length. In this geometry, the electrodes are patterned similarly to the spokes in a wheel. Figure 2-2 below illustrates the overall geometry.
Increasing i Electric Field 0 I A +V ' N N N -v /
Figure 2-2: Spoke electrode geometry integrated into a six-channel system.
The idea behind this geometry is that when a positive and negative voltage at some frequency is applied to the electrodes on either side of a suspended particle, an electric field will be generated that is greater in strength at the inner diameter than at the outer diameter [12]. In the case shown in figure 2-2 above, pDEP would need to be applied to the system in order to cause the dielectric bead to be attracted to the center of the platform. Once the bead has been attracted to the center, a positive and negative voltage at some different frequency is then applied to two different, neighboring electrodes that enclose the target location of the bead-in-movement. As shown in table 2.1 , the manipulation of frequency can result in a shift from pDEP to nDEP. This attribute of dielectrophoresis and the flexibility to easily shift from high to low frequencies are critical to the success of the
proposed spoke geometry.
2.2.2
Point Electrode Configuration
The second geometry that was explored consisted of an array of small (3-5mm), square electrodes. Each channel of this geometry is formed by two parallel lines of electrodes that are spaced three millimeters apart. Figure 2-3 below illustrates the overall geometry.
/1 *'\\ IIncreasing
j Electric
S k
FieldI
NFigure 2-3: Point electrode geometry integrated into a six-channel system.
This geometry is unique because it relies on much more precise control of the applied voltage to each electrode. The basis of this geometry is that the electrodes on either side of the channel that the bead is located in would be sequentially "activated" so that electric field strength is pulled down the channel towards the inner diameter and then out of a different channel.
This DEP approach, known as traveling wave dielectrophoresis (TWD), occurs when high-frequency traveling electric fields cause a particle that is suspended in a low conduc-tivity fluid to move. Similar to the DEP force described, the TWD force experienced by the particle is dependent on the particle volume, the polarizability of the particle and the medium, and the strength of the electric field [9]. Additionally, however, the force caused
by TWD only occurs in high-frequency fields and also depends on the wavelength of the
traveling electric field:
FTWD =-47r 2s7 r3Im(Kc3 1)E2 (2.4)
A
where A is the wavelength of the traveling electric field and In(Kc) is the imaginary component of the Mosotti factor [9]. The imaginary component of the Clausius-Mosotti factor is evaluated because this component corresponds to the out-of-phase part of the dipole moment [9]. The phase lag causes an induced motive force on the particle and
Direction of M iclectric Sphere travel of field
E
electrodes
Figure 2-4: Point electrode geometry integrated into a six-channel system (image excerpted from [9]).
the low conductivity of the fluid with respect to the medium leads to nDEP which causes the particle to levitate above the electrodes [9].
2.3
Numerical Model
The feasibility of each geometry is evaluated based on the time it would take for a bead to travel down one channel of the platform. In order to evaluate the feasibility of DEP manipulation of the millimeter sized beads in the proposed setup, a model was developed using MATLAB software. The main goal of the MATLAB simulation is to model the dynamics of a one-millimeter diameter bead of some material submerged in some medium and to determine how long it would take that bead to travel down one of the channels in each of our proposed channel geometries.
2.3.1
Force and Dynamic Model
The first stage of the MATLAB model is to accurately calculate the forces that the bead would experience in each of the two geometries. The main forces that are considered in the model are the DEP force experienced by the bead, the viscous force caused by the bead's movement in the fluid medium, and the bending force caused by the wire's stiffness.
From equation 2.1, we know that the DEP force is directly affected by the permittivity of the medium, the radius of the particle, the gradient of the electric field surrounding the particle, and the real component of the Clausius-Mossotti factor. Since the manipulation of one-millimeter diameter beads at an applied voltage of I OOV is being specifically explored, the model was developed with four main factors that influence the overall DEP force in mind: the bead material, the liquid medium, the electrode configuration, and the frequency of the applied electric field. Through the model, these factors were varied to determine optimal DEP setting for each of the geometries.
Once the overall DEP force was determined numerically, the viscous force was then modeled. Equations 1.10 and 1.11 demonstrates that the viscous force is directly propor-tional to the velocity of the fluid. This fluid velocity is directly influenced by the DEP force that the particle experiences. Assuming that body forces are negligible and the particle is stable, velocity can be determined through sum of forces:
EF = FDEP - Fdrag - Fbend = 0 (2.5)
Ulaminar FDEP - Fbend (2.6)
2\ p4,rD2CD
FDEP - Fend (2.7)
UStokes 6ir y R(.7
The calculated velocity was then used to determine how long it would take the one-millimeter diameter bead to travel down a channel of a specified length.
2.4
Results
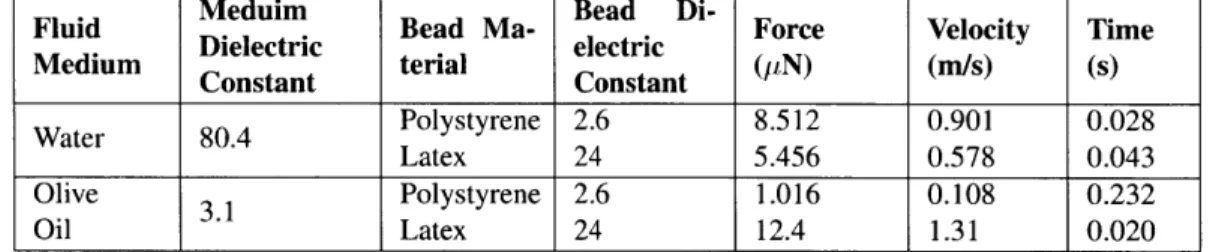
Several bead and fluid medium combinations were simulated for the point electrode ge-ometry to braid a copper wire. The results of the simulation are summarized in table 2.2 below, however the bending force is not included in these results.
Fluid Meduim Bead Ma- Bead Di- Force Velocity Time
Medium Constant terial ecnstant Cntn (/N) (m/s) (s)
Water 80.4 Polystyrene 2.6 8.512 0.901 0.028
Latex 24 5.456 0.578 0.043 Olive 3.1 Polystyrene 2.6 1.016 0.108 0.232
Oil Latex 24 12.4 1.31 0.020
Table 2.2: Table displaying the time required for a 1 mm diameter bead to travel down a 25 mm channel for various bead-medium combinations, assuming a high-frequency electric field.
As mentioned in Chapter 1.3.1, the bending force for the macro scale simulation was on the order of 2pN. This reveals that the Olive Oil -Polystyrene fluid-bead combination would not provide a sufficient enough DEP force to manipulate the particle, however the other three fluid-bead combinations do provide sufficient DEP force.
2.4.1
DEP for Nano-wire Braiding
The MATLAB model was further developed to identify what would be the optimal ap-plied voltage, bead material, fluid medium, and electric field frequency combinations for micro-scale bead manipulation to enable nano-wire braiding of a copper wire. For these simulations, the bead diameter was held at a constant of value of one micrometer.
The results of these simulations are summarized in table 2.3 below.
Fluid Meduim Bead Ma- Bead Di- Velocity Time
Medium Dielectric Constant terial electric Constant Force (fN) (pm/s) (s)
Water 80.4 Polystyrene 2.6 8.512 0.901 27.7
Latex 24 5.456 0.578 43.3 Olive 3.1 Polystyrene 2.6 1.016 0.108 232.4
Oil Latex 24 12.4 1.31 19.1
Table 2.3: Table displaying the time required for a 1 pm diameter bead to travel down a
25 pim channel for various bead-medium combinations, assuming a high-frequency electric
The bending force for the micro scale simulation was on the order of 100 pN. This bending force is approximately three orders of magnitude larger than the modeled DEP force. This suggests that at the micro scale modifications would have to be made to the current electrode configuration as well as modifications to experimental parameters such as the applied voltage. Note that the above tables display the magnitude of the DEP force, not the directionality.
Chapter 3
Bead Manipulation via Fluid Flow
The second method that was explored for the controlled manipulation of beads is based on a driven fluid flow system that is integrated with an automated channel gate system.
3.1 Fluid Flow Dynamics
For this bead manipulation method, as shown in equation 1.12, the force applied by the mass flow of the fluid will need to be greater than both the bending force and the drag force that the bead experiences.
For an incompressible flow with a uniform velocity, the mass flow rate simplifies to:
rh J pudA = pAu, (3.1)
JCS
where p is the density of the fluid, A is the cross-sectional area and u is the velocity [16]. In this thesis, a pump was used to induce a flow within the platform that was designed. Rearranging of equation 3.1 shows that if the flow rate of the pump, the platform channel geometry, and the viscosity of the fluid medium are known, the velocity of the flow can be determined [16]:
fr
U = . (3.2)
pA
velocity as the fluid flow.
Ffo h rh x u (3.3)
Ff10, > Fdrag + Fbend (3.4)
Once the bead velocity is determined, the braiding rate can be established:
tturn= 2 x Lchannel (3.5)
U
Here, the braiding rate is defined as the amount of time to travel from an end of one channel to the end of another channel, otherwise known as the amount of time to make one turn of the braid.
3.2
Platform Design
The platform for this method was designed with two main considerations in mind: (1) a channel system that can accommodate a minimized-number of pump sources to drive continuous fluid flow and (2) an automated gate system that can enable controlled braiding
by isolating which channels are open.
3.2.1
Initial Platform Prototype
The first platform prototype was designed and manufactured with solely consideration (1) in mind. The goal of this prototype was to begin to understand how a millimeter-scaled bead would move within the system when driven by the chosen pump source and to get a feel for what manufacturing method would be the most reasonable for creating future platform iterations. Figure 3-1 below displays a machined version of the initial prototype design.
Key features of this design are: a center hole (for inlet flow), the two drains on the outer ring (for outlet flow), the outer channel that "connects" all channels at the outer diameter, and the individual channel geometry. With this prototype the overall flow of the fluid was observed based on various pump outlet positions.
Figure 3-1: Machined version of the initial prototype.
3.2.2
Gate System
The choice of gating system is critical for this bead manipulation method. Since this method is based on pumps that are constantly driving the fluid flow, it became necessary to design a gating system that controls when a bead is exposed to the driven flow. It follows that the gating system needed to have a normal state or position of blocking the bead from passing both through the outer and inner end of a channel.
The main factors that were considered when evaluating gating options were: (1) the simplicity of integrating the system within the scope of this thesis, (2) the bulkiness of the system, and (3) the reliability of the system. The gating system that was selected for inte-gration and experimentation was a pneumatic valve control system. The idea behind this system is that a small balloon will protrude from the base of each channel of the platform in such a way that when the balloon is deflated the flow will cause it to lay flatter along the bottom of the channel and when the balloon is inflated it will block the bead from passing through the channel. Each balloon is connected to a to a pipe whose air flow is controlled
by a 3-way electronic valve. The electronic valves allow for the individual manipulation of
Air Tank
Inlet
Vle Vave vae V~ave vave Valve
S
'
.
I
O
S.@
Figure 3-2: Schematic representation of the balloon gating system.
3.2.3
Final Design
The chosen valve-actuated gating system led to several key platform design changes. In order to reduce the number of valves required, a balloon is lined at each inner-diameter channel opening, however at each outer edge the channels are simply narrowed to a width smaller than the bead diameter so that the bead can not escape the channel without the gate being actuated. Additionally, the original platform prototype was modified so that the tubing and ballon component would be physically embedded into the platform base. Figure
3-3 below illustrates a top and side view of the final platform design.
Figure 3-3: Final platform design.
The balloons proved to be a limiting factor for the platform assembly since we were performing a rapid prototyping process on a limited budget and could not order custom balloons at a smaller size. Due to this the overall platform channel geometry was scaled-up to accommodate the resources available to us. Figure 3-4 below illustrates the dimensions of the final channel geometry.
L.g=70.44 mm L=62.44mm
h=15.08mm
w=14.5mm
Figure 3-4: Final channel geometry.
The water pump used in the final demo design has a flow rate of 1.26 x 10-1 m3/S.
Given the channel dimensions described in figure 3-4 and the fact that water has a density
p = 1000 kg/m3, using equation 3.2 it can be determined that u = 5.77 x 10-Im/s and
the braiding rate is determined to be ttu = 0.245s. For simplicity, the cross-sectional
area of the channel was assumed to be a constant rectangle over a total effective length of
70.66mm.
From equations 1.5, 1.6, and 1.7 the hydraulic radius of the channel is found to be 4.896
mm. Consequently, the Reynolds number equation can be solved given that the kinematic viscosity, v of water is 1.004 x 10- 6m2
/s:
Re = 2.81, (3.6)
0.1 < Re < 500. (3.7)
From this it is clear that on the macro-scale we are working in the non-Stokes' laminar flow regime.
3.3 Experimental Setup
3.3.1
Platform Fabrication
Given the resource and time constraint of this thesis, laser cutting was chosen as the rapid prototyping fabrication method. Each layer of the platform was designed and laser cut out of acrylic of various thickness.
Figure 3-5: Each type of acrylic part used and the overall platform assembly.
Appendix B includes dimensioned drawings of each part that was laser cut. The layers were adhered together with hot glue and coated with a water-tight sealant to secure the platform assembly.
The balloon gating system was assembled following the schematic shown in figure 3-2. Tubing of inner diameter 1/16 in and outer diameter 3/16 in are used for the valve-balloon connection. Each of the valves shown in the figure was connected to an electrical circuit that consisted of a Mosfet switch, a resistor and an Arduino board. This schematic is shown in figure 3-6.
The gating system and the platform assembly were integrating by inserting each balloon-tubing pair into the each of the radially symmetric holes that lie within the inner radius of each channel, as shown in figure 3-7
Modfet
Power Supply
-V +V
Figure 3-6: Schematic of the electrical circuit.
3.3.2 Experimentation
The main objective of the physical model is to demonstrate that a bead can be manipulated from one channel to another through the use of electronic controls on a macro-scale. We tested this objective by creating an Arduino valve code that timed the opening of the gates so that the braiding pattern that was chosen could be executed. With the given limitation of two uni-directional pumps, we manually directed the flow based on which channel gates were programmed to be opened. Figure 3-8 displays the overall experimental setup in lab.
3.4 Results
The demo served to be useful in providing a visualization for what a braiding platform architecture consists of, however several improvements need to be made in order for an acceptable braiding rate and braiding reliability to occur.
The flow rate provided by the pump was sufficient enough to manipulate the bead's movement, however was not sufficient enough to deflect the balloon in each channel enough to let the bead pass when the valve for that channel has been closed. A pump with a higher flow rate would allow for an increased reliability in the braiding reliability.
In the experiment performed in this thesis the pump inlet was manually manipulated to match each channel that was switched open or closed. This mechanism proved to be a bit unreliable and caused the braiding consistency to decrease. A timing-linked water and air
Figure 3-7: Balloon gating system integrated into the platform channels.
valve for each channel would greatly improve the braiding reliability lost through manually manipulating the inlet source.
The drains also served to reduce the braiding reliability. The rate that the platform was draining was greater than the rate that the platform was filling. This prevented the balloons from ever being fully submerged in the fluid which greatly hindered the amount of pressure that could be applied to the balloons to cause them to deflect and let the bead pass through the channel.
The beads used in the experiment had a density that was too low for effective braiding. When a flow was applied to the channel, the bead in that channel floated to the top of the channel which caused it to not be constrained. This led to ineffective braiding, as the beads did not follow the desired path. A platform cover with narrow slit that centrally aligned in each channel could solve this problem. This would keep the bead constrained within the channel even if it floats at the surface level, yet still allow for braiding to occur. Another
Figure 3-8: In-lab experimental setup.
Otherwise, the balloons were able to fully block the channel from bead passage with an applied pressure ranging from 10-15 psi. In this pressure range, the beads would grow until they reached a certain equilibrium size and remain at that size due to the fact that there were several exhausts left open while the system was pressurized.
3.4.1
Driven Flow for Nano-Wire Braiding
The channel constricting concept that the demo illustrates on a macro scale can be applied at the micro scale through application of soft lithography. Soft lithography is a process in which an elastomer is patterned with a micro machined mold in order to manufacture a micro-fluidic device [15]. This type of micro-fabrication is attractive because of the low equipment costs and the short process cycle time -new devices can be created in one day
[15]. A valve-actuated micro system could be created through multilayer soft lithography.
In this process, multiple elastomers, such as PDMS, are cured together to create a layered fluidic device [15].
Figure 3-9: Soft lithography layering process. (image excerpted from [15]).
Typically, in a cross-channeled two-layer device pressure is applied to the top channel, which causes the elastomer to deflect downwards to effectively close the lower channel and block the flow through the channel [15]. For NanoLitz, this design could be modified to enable the pressure to be applied from the bottom flow channel and thus cause the elastomer to deflect upwards to block the channel.
Chapter 4
Conclusions and Future Work
Access to NanoLitz technology would enable engineers to produce inductors with very low losses at very high frequencies. In this work we explored two directed assembly methods, dielectrophoresis and driven fluid flow, for litz wire braiding at a macro scale. Each method was explored to gain intuition on how the method could be applied to NanoLitz fabrication.
4.1
Summary of Results
4.1.1
DEP Manipulation
Under the exploration of this thesis, DEP proved to not be a viable method to pursue as a macro scale demo for controlled wire braiding due to results obtained for the magnitude of the micro scale forces. At the macro scale the DEP force against the drag force was simulated to be on the same order of magnitude as the bending force required to bend a copper wire. At the micro scale, however, the DEP force against the drag force was simulated to be three orders of magnitude less than the bending force required to bend a copper wire.
4.1.2
Driven Flow Manipulation
The driven fluid flow bead manipulation method proved to be a viable method for controlled wire braiding on the macro scale once proper modifications to the final platform design
were tested. In subsequent testing an additional pump source was added to double the flow rate, two of the six drains designed into the system were plugged, and a prototype of a platform cover was created to test whether braiding would improve or not with these modifications. These modifications proved to greatly increase the braiding reliability of the system.
If we were to continue to develop a macro scale demo, we would investigate the use of
smaller balloons, or other elastic materials,that could be attached at the end of the tubing so that the final channel and platform geometry could be based on the bead diameter rather than the balloon dimensions. This would allow for a much cleaner demo and allow for more insight on the applicability of this method on a micro scale.
4.2
Future Work
The work of this thesis has led to the conclusion that controlled wire braiding on a micro scale is a feasible pursuit for the NanoLitz team. Although DEP bead manipulation was not pursued for the macro scale demo created in this thesis, DEP bead manipulation could be further investigated to successfully perform controlled wire braiding. Wire braiding could be achieved if a combination of a higher voltage is applied, a softer metal wire material is used, and/or a more efficient electrode geometry is designed. Likewise, the soft lithography method described in Chapter 2.4.1 is worth pursuit for micro-scale braiding as higher forces could be applied to bead in this case in the form of an air or liquid driven fluid source, for example. Compared to DEP, however, this system would be a bit bulkier due to the necessity for valve control.
Appendix A
-I -___________ 01 4.76- ii-244.761LLJ cn 0 K) -0 Co -I
J
0 Figure A-1: Solidworks drawing of the top wall, where the braid wires are joined. 46~1A7ri
N
00 0 0 0-J-r
0
w 0 r:80 0 ___ ___ C) 0
Y710
0 5 5 1 CA,QL
~~1~~ >1 * 0 0 0 Fn 00 4.76 0 Figure A-2: Solidworks drawing of the side walls, which hold up the overall structure and the top wall. 47 84.76 -0 mw
~
!1 -C 16.67 0 Figure A-3: Solidworks drawing of the outer ring of the structure. 48 0225 z z m 0 m C N) N) U'2 3 4 5 6
AB
U- LO 0O
CN (Y)
UNLESS OTHERWISE SPECIFIED: FINISH:
DIMENSIONS ARE IN MILUIMETERS SURFACE FINISH: TOLERANCES: LINEAR: ANGULAR: 0LOr DEBUR AND BREAK SHARP EDGES
NAME SIGNATURE DATE I_ _
IDRAWN CHK'D
DO NOT SCALE DRAWING REVISION
TITLE:
MFG
MATERIAL:
GQA ____ DW
""'Bottom
Support
^A
WEIGHT: SCALE:1:3 SHEET I OF I0 Q0 -- I C '- . 3 4 6 2 5
A
* * -245 *240.24 9.76 5 n I0. T-0i Li.. M52 -M I> 10 0 CD -U
CDi
1
7
1~
0 0 0 M 0 62.44 600 200 0 Figure A-5: Solidworks drawing of the platform sections. 50 ~5.08 ----I Mto
2 3 00
VY
40 * 0 4.76 0o *0 10 B c Dj 0 '40 CN c DEBUR AND BREAK SHARF EDGESNAME SIGNATURE DATE
DRAWN CHKD APPVD IGQA 2 MATERIAL: 1 -t !WBGHT:
DO NOT SCALE DRAWING REVISION
TITLE:
Base Plate
SCALE:1:3 SHEET I OF 1
2
UNLESS OTHERWISE SPECIIED: FINISH:
DIMENSIONS ARE IN MILUIMEERS SURFACE FINISH: TOLERANCES: UINEAR: FANGULAR: NM INTR 3 4 56 B 0 to 0
Appendix B
const int valvel
const int valve2
const int valve3
void setup() {
// initialize digital pin
pi nMode(valvel, OUTPUT); pinMode(valve2, OUTPUT); pinMode(valve3, OUTPUT); } 13 as an output. //white //green //purple void loopo {
//Valves are always open, so by turning output to high, it closes valve
dgiitalWrite(valve2, delay(5000); digitolWrite(valve2, //delay(3000); digitalWrite(valvel, delay(5000); digltalWrite(valvel, //delay(3000); digitalWrite(valve3, delay(5000); digitalWrite(valve3, //delay(3000);
HIGH); // close valve 2
// wait for 5 seconds
LOW); // open valve 2
// wait for 3 second
HIGH); // close valve 1
// wait for 5 seconds
LOW); // open valve 1
// wait for 3 second
HIGH); // close valve 3
// wait for 5 seconds
LOW); // open valve 3
// wait for 3 second
Figure B-1: Arduino code for gate release to enable braiding.
13; 12;
11;
Bibliography
[1] M. Bartoli, N. Noferi, A. Reatti, and M.K. Kazimierczuk. Modeling Litz-wire
wind-ing losses in high-frequency power inductors. In Power Electronics Specialists
Con-ference, 1996. PESC '96 Record., 27th Annual IEEE, volume 2, pages 1690-1696
vol.2, Jun 1996.
[2] M.V.K. Chari and Z.J. Csendes. Finite element analysis of the skin effect in current carrying conductors. Magnetics, IEEE Transactions on, 13(5):1125-1127, Sep 1977.
[3] Stuart Churchill. Viscous Flow: The Practical Use of Theory (Fluid Flow). Springer
Wien New York, 2011.
[4] David Cory and Manos Chaniotakis. Frequency Response: Resonance, Bandwidth,
Q
Factor. MIT OCW 6.071, 2006.[5] Amy Duwel. Nano-Litz: Braided nano-wires for high performance RF components.
November 2014.
[6] Shreeram Inamdar. Open Channel Flow. April 2012.
[7] Thomas B. Jones. Electromechanics of Particles. Cambridge University Press, 1995. [8] Mohamed Kharboutly, Micha8l Gauthier, and Nicolas Chaillet. Modeling the
Trajec-tory of a Microparticle in a Dielectrophoresis Device. Journal Of Applied Physics,
2009.
[9] H Morgan, N Green, M Hughes, W Monaghan, and T Tan. Large-area
travelling-wave dielectrophoresis particle separator. journal of micromechanics and microengi-neering. Journal of Micromechanicas and Microengineering, 7, June 1997.
[10] Joshua C. Nation. Fabrication of Chip-Scale Radio Frequency Inductors. Master of
Science in Mechanical Engineering, Massachusetts Institute of Technology, Depart-ment of Mechanical Engineering, Jun 2014.
[11] Adrian Neculae, Claudia G. Biris, Madalin Bunoiu, and Mihail Lungu. Numerical
Analysis of Nanoparticle Behavior in a Microfluidic Channel Under Dielectrophore-sis. 2012.
[12] N. Phansiri and B. Techaumnat. Study on the electromechanics of a conducting par-ticle under nonuniform electric field. Dielectrics and Electrical Insulation, IEEE
[13] Ant6nio Ramos. Electrokinetics And Electrohydrodynamics In Microsystems.
Springer Wien New York, 2011.
[14] Jong Ming Sung. Dielectrophoresis and Optoelectronic Tweezers for Nanomanipula-tion. Stanford Physics 210, 2007.
[15] Marc A. Unger, Hou-Pu Chou, Todd Thorsen, Axel Scherer, and Stephen R. Quake.
Monolithic Microfabricated Valves and Pumps by Multilayer Soft Lithography.
Sci-ence, (5463):113, 2000.
![Figure 1-1: Example of a litz bundle comprised of nine wire strands (image excerpted from [5]).](https://thumb-eu.123doks.com/thumbv2/123doknet/14148018.471451/14.918.277.616.111.326/figure-example-litz-bundle-comprised-strands-image-excerpted.webp)

![Figure 1-4: Cross-section of an open rectangular channel (image excerpted from [6]).](https://thumb-eu.123doks.com/thumbv2/123doknet/14148018.471451/18.918.299.605.695.1034/figure-cross-section-open-rectangular-channel-image-excerpted.webp)
![Figure 1-5: CD versus Reynolds number for a smooth, spherical sphere (image excerpted from [3]).](https://thumb-eu.123doks.com/thumbv2/123doknet/14148018.471451/19.918.257.643.671.947/figure-versus-reynolds-number-smooth-spherical-sphere-excerpted.webp)
![Figure 2-1: Particle polarity for pDEP vs. nDEP (image excerpted from [14]).](https://thumb-eu.123doks.com/thumbv2/123doknet/14148018.471451/25.918.289.599.131.372/figure-particle-polarity-pdep-vs-ndep-image-excerpted.webp)

![Figure 2-4: Point electrode geometry integrated into a six-channel system (image excerpted from [9]).](https://thumb-eu.123doks.com/thumbv2/123doknet/14148018.471451/28.918.244.642.361.559/figure-point-electrode-geometry-integrated-channel-image-excerpted.webp)