Numerical solution of the Monge-Kantorovich problem by Picard iterations
Texte intégral
Figure


Documents relatifs
The Monge-Kantorovich problem is revisited by means of a variant of the saddle-point method without appealing to cyclical c -monotonicity and c -conjugates.. One gives new proofs of
We present a general method, based on conjugate duality, for solving a con- vex minimization problem without assuming unnecessary topological restrictions on the constraint set..
As regards the most basic issue, namely (DG) pertaining to the question whether duality makes sense at all, this is analyzed in detail — building on a lot of previous literature —
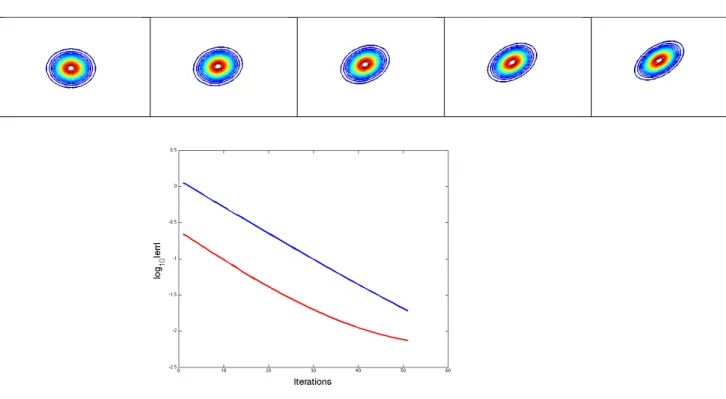
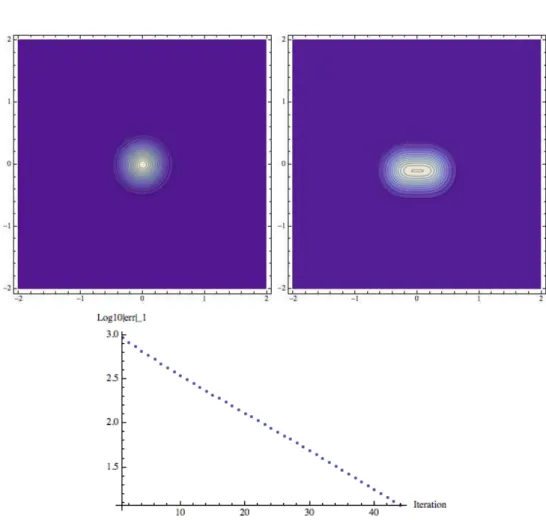
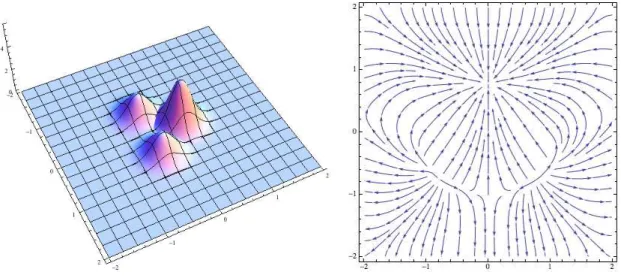
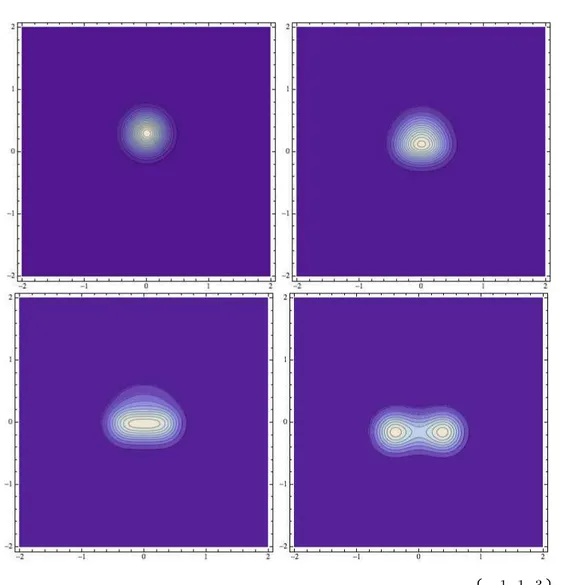
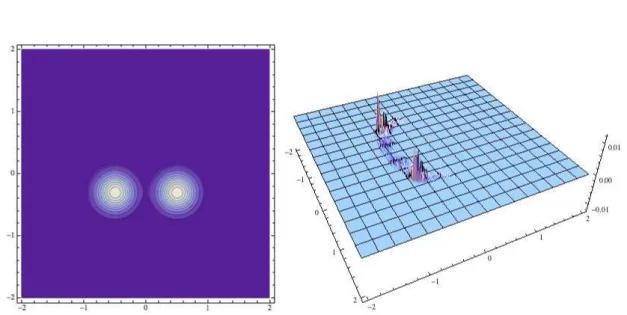
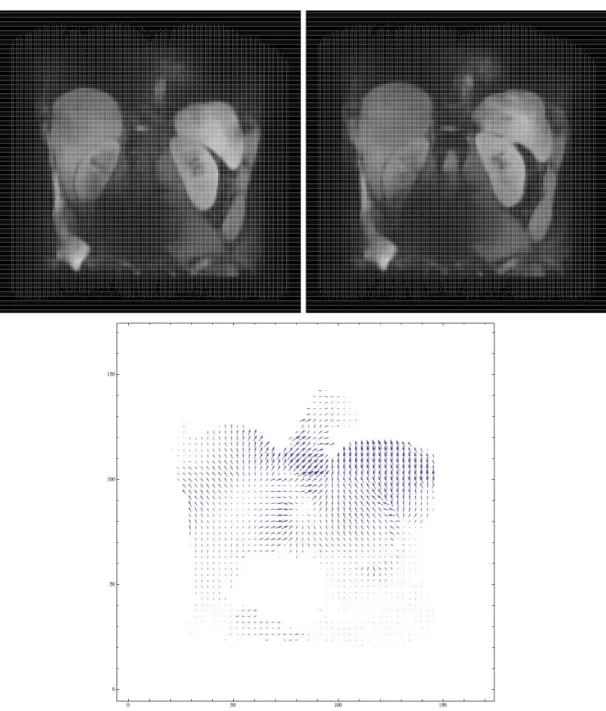
We first present the level set method, and then we derive from the previous analysis an iterative scheme which converges provided that the initial guess is not too far from
Consider the unsteady axisymmetric mixed convection boundary layer flow over a vertical permeable slender cylinder of radius R placed in a non-Newtonian power law fluid with power
xplanations. Others will simply drop out on the grounds that your class doesn't meet their needs.. There are several ways of dealing with this situation. It makes good pedagogical
A new abstract characterization of the optimal plans is obtained in the case where the cost function takes infinite values.. It leads us to new explicit sufficient and
A new abstract characterization of the optimal plans is obtained in the case where the cost function takes infinite values.. It leads us to new explicit sufficient and necessary
