Contribution à la Simulation Sans Maillage des Phénomènes Électromagnétiques
Texte intégral
Figure



Documents relatifs
On étudie plus particulièrement les effets de pénétration du champ magnétique dans un induit homogène en mouvement, les phénomènes liés aux
Compatibilité électromagnétique des implants médicaux actifs : contribution à la caractérisation de l’immunité des stimulateurs cardiaques aux perturbations
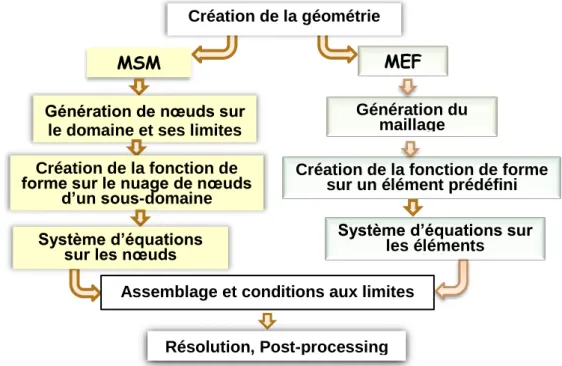
Cette première partie est dédiée aux différentes méthodes de calcul de gradient. Le calcul des gradients est une partie importante et déterminante pour la création d’un
Méthodes sans maillage de type éléments naturels pour la simulation des procédés de mise en forme.. Iciar Alfaro, Julien Yvonnet, Elías Cueto, Francisco Chinesta, Pierre Villon,
Il nous a ainsi semblé important de considérer les différentes grandeurs physiques - champs électrique et magnétique, densité de courant - existant dans les condensateurs à
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
Dans cette présente étude, une synthèse des méthodes d’identification des paramètres et des retards d’une structure de modèle à temps continu les plus utilisées dans
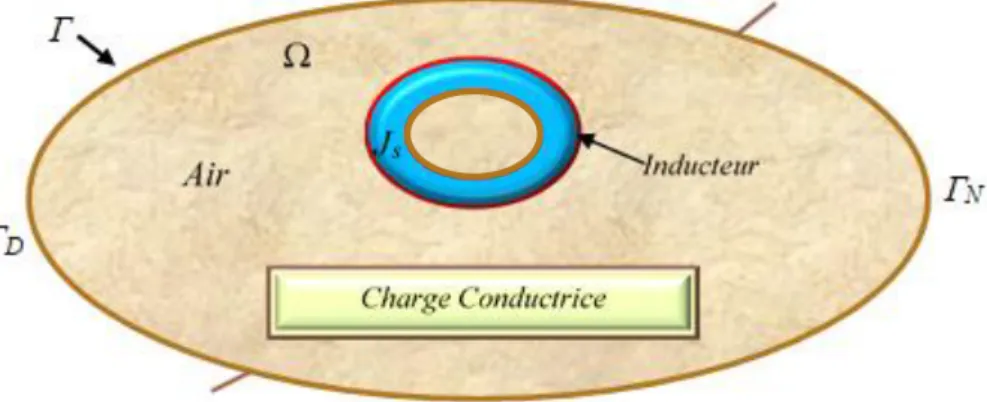
Dans ce travail, après avoir décrit les phénomènes physiques et principes mathématiques, les méthodes d'analyse numériques adaptées aux problèmes magnétodynamiques et
