Ministère de l’Enseignement Supérieur et de la Recherche Scientifique
THESE
Présentée à
L’université Hadj Lakhdar Batna
En vue de l’obtention du diplôme de
DOCTORAT EN SCIENCES
EN ELECTROTECHNIQUE
Présentée par
BOUALI KHEDIDJA
Maitre Assistant Classe A - Université de Ouargla
Magister en Electrotechnique - Université de Batna, 2006
Ingénieur d’Etat en Electrotechnique –Université de Batna, 1992
Soufiane TAIBI
Prof
Univ- Batna
Président
Fatima Zohra KADID
Prof
Univ- Batna
Rapporteur
Rachid ABDESSEMED
Prof
Univ- Batna
Co-Rapporteur
Djamel RAHEM
Prof
Univ- O.E-Bouaghi Examinateur
Lakhdar MOKRANI
Prof
Univ- Laghouat
Examinateur
Leila BENALIA
MC
Univ- M’sila
Examinateur
CONTRIBUTION A L’ETUDE
ET L’OPTIMISATION DES
CONVERTISSEURS
MAGNETOHYDRODYNAMIQUES
(MHD)
REMERCIEMENTS
Ce travail a été préparé au sein du Laboratoire d’Electrotechnique de Batna LEB, sous la direction du Professeur Fatima Zohra KADID de l’université de Batna.
Ainsi, je tiens à exprimer mes plus vifs remerciements à mon encadreur : Dr. Fatima Zohra
KADID Professeur à l’Université de Batna et mon Co-encadreur : Dr Rachid ABDESSEMED, Professeur à l’Université de Batna, de m’avoir proposé le sujet de cette
thèse et en me faisant profiter de leurs conseils judicieux. Je les remercie infiniment pour leurs qualités humaines et scientifiques.
J’adresse mes plus vifs remerciements à Monsieur Soufiane TAIBI Professeur à l’Université de Batna pour m’avoir fait l’honneur de présider le jury de ma thèse.
Mes remerciements vont de même aux autres membres de jury examinateurs qui m’ont fait l’honneur de participer au jury de ma thèse. Il s’agit, en l’occurrence de :
Djamel RAHEM Prof Univ- O.E-Bouaghi Examinateur Lakhdar MOKRANI Prof Univ- Laghouat Examinateur
Leila BENALIA MC Univ- M’sila Examinateur
Je tiens par ailleurs à remercier vivement tous les enseignants de l’université de Ouargla et en particulier ceux du département d’électrotechnique pour le respect et l’encouragement.
BOUALI
1
SOMMAIRE
Introduction générale
1. Introduction 14 2. Problématique 16 3. Objectif de la thèse 17 4. Structure de la thèse 17Chapitre un
Etat de l’art des convertisseurs MHD
1.1 Introduction 191.2 Historique de la magnétohydrodynamique 19
1.3 Apport et limites des machines tournantes 21
1.4 Les convertisseurs MHD linéaires 21
1.4.1 Les convertisseurs MHD linéaires à conduction 22
1.4.1. 1 Pompes MHD à conduction à courant continu 24
I.4.1.2 Pompes MHD à conduction à courant alternatif 26
1.4.2 Les convertisseurs MHD linéaires à induction 27
1.4.2.1 Différentes géométries de pompes à induction 28
1.4.2.1.1 Pompes à induction plates 28
1.4.2.1.2 Pompes à induction annulaires 29
1.4.2.2 Régimes de fonctionnement 30
2
1.5 Comparaison entre les pompes à conduction et à induction 31
1.6 Domaines industriels d’application de la MHD 31
1.6.1 Génération de l’électricité par la MHD 31
1.6.1.1 Générateurs à conduction 32 1.6.1.2 Générateurs à induction 33 1.6.2 Propulseurs MHD 34 1.6.2.1 Propulseurs à plasma 34 1.6.2.2 Canon électromagnétique 34 1.6.2.3 La Propulsion navale 34
1.6.3 Les Applications à la métallurgie 35
1.6.3.1 Magnétohydrodynamique des fours à induction 35 1.6.3.2 Brassage 36 1.6.3.3 Lévitation 36 1.6.3.4 Formage 36 1.6.3.5 Pulvérisation 36 1.7 Conclusion 36
Chapitre deux
Modélisation en 2D d’une pompe MHD à conduction
2.1 Introduction 372.2 Méthodes numériques 38
2.2.1 Méthodes des différences finies 38
2.2.2 Méthodes des éléments finis 38
2.2.3 Méthodes des volumes finis 39
2.3 Phénomènes électromagnétiques 40
2.4 Equations de Maxwell 40
2.4.1 Conditions aux limites et conditions d’interfaces 42
2.4.1.1 Conditions aux limites 42
2.4.1.2 Conditions d’interfaces 43
3
2.4.3 Modèle Magnétodynamique 44
2.4.4 Hypothèses simplificatrices 46
2.4.5 Formulation en coordonnées cylindriques axisymétriques 47 2.5 Mise en œuvre de la méthode des volumes finis 48 2.6 Etude du modèle électromagnétique par volume finis 49 2.7 Description du prototype MHD à conduction 51 2.8 Application et résultats de la modélisation numérique (volumes finis) 53
2.8.1 Potentiel vecteur magnétique 54
2.8.2 Présentation de l’induction magnétique 56 2.8.3 Distribution de la densité de courant 57 2.8.4 Distribution de la force électromagnétique 57 2.9 Introduction d’un noyau ferromagnétique à l’intérieur du canal 58 2.9.1 Distribution du potentiel vecteur dans la pompe MHD 58 2.9.2 Présentation de l’induction magnétique dans la pompe MHD 59 2.9.3 Distribution de la densité de courant dans la pompe MHD 60 2.9.4 Distribution de la force électromagnétique 60
2.10. Conclusion 61
Chapitre trois
Etat de l’art des méthodes d’optimisation
3.1 Introduction 62
3.2 Formulation mathématique d’un problème d’optimisation 63 3.3 Problèmes d’optimisation sans contraintes 63
3.4 Problèmes d’optimisation contraints 64
3. 5 Traitement des contraintes 65
3.5.1 Méthodes de transformation 65
3.5.1.1 Méthodes de pénalités 65
3.6 Optimisation stochastique avec contraintes 67
4
3.8 Classification des méthodes d'optimisation 68 3.8.1 Méthodes d’optimisation déterministes 68 3.8.1.1 Méthodes déterministes unidimensionnelles 69 3.8.1.2 Méthodes déterministes multidimensionnelles 70
3.8.2 Méthodes stochastiques 74
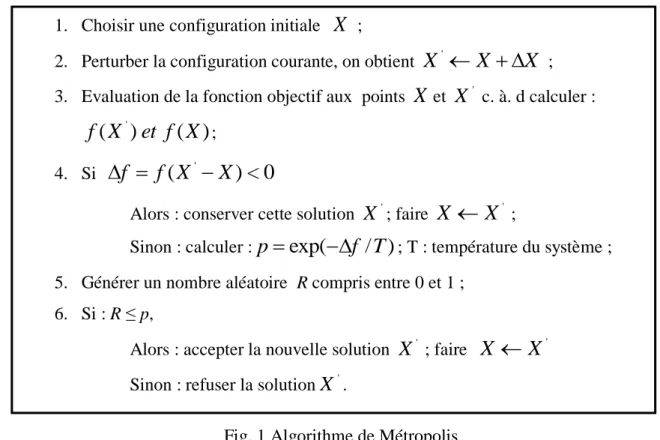
3.8.2.1 Principe d'un algorithme stochastique 74 3.8.2.2 Méthode de recuit simulé (simulated annealing SA) 75
3.8.2.3 Algorithme du recuit simulé 76
3.8.2.4 Paramètres de contrôle 77
3.8.3 Recherche Tabou (Tabu Search TS) 80
3.8.4 Les algorithmes génétiques (AG) 81
3.8.4.1 Principe de fonctionnement 81
3.8.4.2 Mise en œuvre de la procédure des Algorithmes génétiques 84
3.8.5 Méthode PSO 88
3.8.6 Méthode de colonie de fourmis 91
3.9 Méthodes hybrides 93
3.10 Conclusion 94
Chapitre quatre
Conception par optimisation de la pompe MHD à conduction
4.1 Introduction 95
4.2 Démarche de conception par optimisation 95
4.3 Description du dispositif à optimiser 96
4.4 Formulation des problèmes d’optimisation 97 4.4.1 Calcul de la masse totale de la pompe 98 4.5 Conception par optimisation de la pompe MHD à conduction 100
4.5.1 Méthodes stochastiques 100
4.5.1.1 Méthode du recuit simulé (SA) 100
5
4.5.1.3 Méthode des Algorithmes Génétiques 101
4.5.2 Méthodes déterministes 101
4.5.2.1 Méthode de Quasi-Newton 101
4.5.2.2 Méthode Pattern - Search 101
4.5.3 Méthodes hybrides 101
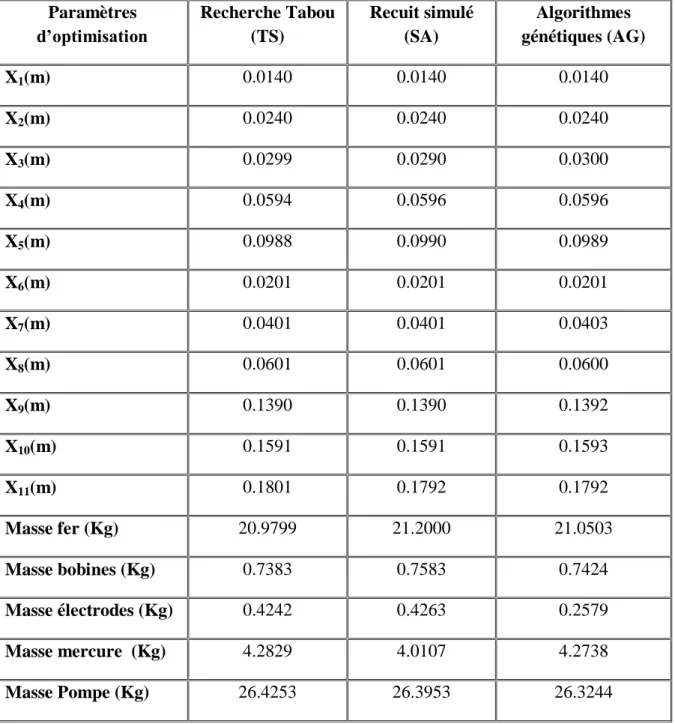
4.6 Résultats de l’optimisation 102
4.6.1 Résultats des méthodes stochastiques 102 4.6.2 Résultats des méthodes déterministes 103
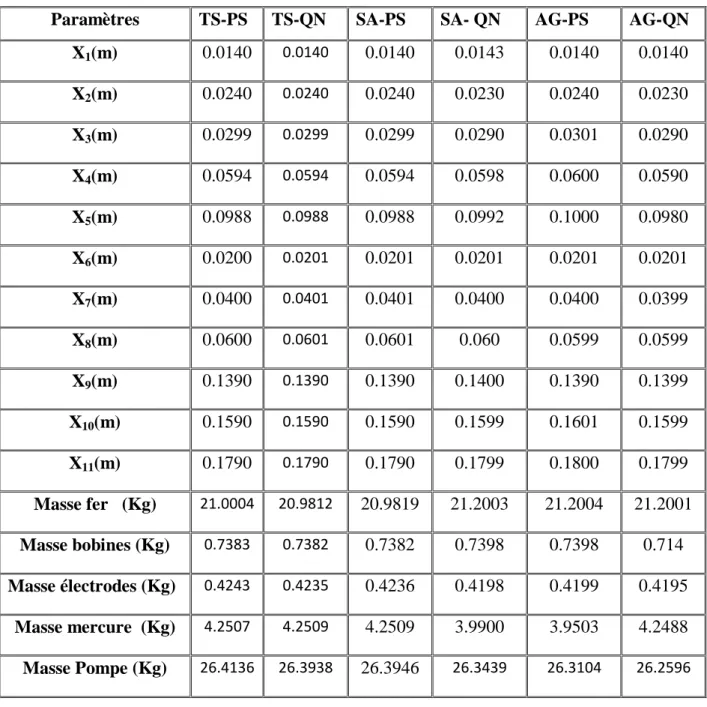
4.6.3 Résultats des méthodes hybrides 105
4.6.3.1 Hybridation (AG-QN) - (AG-PS) 106
4.6.3.2 Hybridation (SA-QN) - (SA-PS) 106
4.6.3.3 Hybridation (TS-QN) - (TS-PS) 107
4.7 Comparaison des méthodes d’optimisation 108
4.7.1 Méthodes non hybrides 108
4.7.2 Méthodes hybrides 109
4.7.2.1 Méthodes hybrides (SA-QN) - (SA-PS) 109 4.7.2.2 Méthodes hybrides (AG-QN) - (AG-PS) 109 4.7.2.3 Méthodes hybrides (TS-QN) - (TS-PS) 110 4.8 Etude des performances de la pompe à conduction par la MVF 110 4.8.1 Distribution du potentiel vecteur magnétique dans la pompe MHD 110 4.8.2 Induction magnétique dans la pompe MHD 111 4.8.3 Distribution de la densité de courant dans la pompe MHD 112 4.8.4 Distribution de la force électromagnétique dans la pompe MHD 113 4.9 Etude des performances de la pompe à conduction par la MEF 113
4.9.1 Présentation du logiciel ANSYS 114
4.9.2 Validation des résultats par ANSYS 114
4.10 Conclusion 119
Conclusion générale 120
Annexes 122
6
Notations et Symboles
Symbole
Unité
Description
A A/m Potentiel magnétique
B
Tesla Induction magnétique
D
C/m2
Induction électrique (Déplacement électrique)
E
V/m Champ électrique eleF
N/m 3Force volumique de Lorenz
H
A/m Intensité du champ magnétiqueI A Courant électrique
m/s Vitesse d’écoulementz
m/s La composante de la vitesse suivant (OZ)U V Potentiel scalaire électrique
i
J A/m2 Densité des courants induits
a
J A/m2 Densité des courants injectés dans les électrodes
ex
7
ɛ0 F/m Permittivité électrique du vide
ɛ F/m Permittivité électrique
ρ Kg/m3 Densité volumique
µr - Perméabilité relative
8
Nomenclature
Abréviation Description
MHD Magnétohydrodynamique
DC Courant continu
MEF Méthode des éléments finis MDF Méthodes des différences finies MVF Méthodes des volumes finis
SA Simulated annealing (recuit simulé)
AG Algorithmes génétiques
TS Tabu Search (recherche tabou)
QN Methode de Quasi-Newton
9
Liste des Figures
Fig. (1.1) Schéma d'une pompe MHD à conduction 23
Fig. (1.2) Pompe MHD à conduction à courant continu 25
Fig. (1.3) Principe d’un générateur MHD à l’eau de mer type hélicoïdal 25
Fig. (1.4) Schéma d’une pompe MHD AC 26
Fig. (1.5) Lignes de courant dans une pompe MHD à induction 28
Fig. (1.6) Pompe MHD à induction plate 28
Fig. (1.7) Pompe MHD annulaire à induction 29
Fig. (1.8) Générateur MHD à induction (tuyère linéaire) 32
Fig. (1.9) Générateur à induction 33 Fig. (1.10) Le Yamato 1 dans la baie de KOBE 35
Fig. (2.1) Maillage du domaine d’étude 48
Fig. (2.2) Discrétisation dans la méthode des volumes finis 49
10
Fig. (2.4) Géométrie de la pompe MHD à conduction 52
Fig. (2.5) Organigramme de la méthode des volumes finis 54
Fig. (2.6a) Lignes équipotentielles dans la pompe MHD 55
Fig. (2.6b) Distribution du potentiel vecteur magnétique dans la pompe en 3D 55
Fig. (2.7a) Induction magnétique dans la pompe MHD en 3D 56
Fig. (2.7b) Induction magnétique dans la pompe MHD 56
Fig. (2.8) Densité de courant induit dans la pompe MHD 57
Fig. (2.9) Force électromagnétique dans la pompe MHD 57
Fig. (2.10) Géométrie de la pompe MHD avec noyau ferromagnétique 58
Fig. (2.11a) Lignes équipotentielles dans la pompe MHD avec noyau ferromagnétique 58 Fig. (2.11b) Potentiel vecteur magnétique dans la pompe MHD avec noyau ferromagnétique 59 Fig. (2.12) Induction magnétique dans la pompe avec et sans noyau ferromagnétique 59 Fig. (2.13) Densité de courant induit dans la pompe MHD à conduction avec et sans noyau ferromagnétique 60 Fig. (2.14) Force électromagnétique dans la pompe MHD avec et sans noyau ferromagnétique 60 Fig. (3.1) Représentation du minimum local et global d’une fonction 68
Fig. (3.2) Principales méthodes déterministes multidimensionnelles 71
Fig. (3.3) Principales méthodes stochastiques 75
11
Fig. (3.5) Principales étapes d’un algorithme génétique 83 Fig. (3.6) Représentation d'un individu; 6a codage réel, 6b codage binaire 84
Fig. (3.7) Processus de croisement 87
Fig. (3.8) Déplacement d’une particule 90
Fig. (4.1) Procédure de conception par optimisation 96 Fig. (4.2) Résultats d’optimisation par les algorithmes génétiques 103 Fig. (4.3) Résultats d’optimisation par la méthode Quasi-Newton 104 Fig. (4.4) Résultats d’optimisation par Pattern Search 104 Fig. (4.5) Résultats d’optimisation par la méthode hybride (AG-QN) 106 Fig. (4.6) Résultats d’optimisation par la méthode hybride (AG-PS) 106 Figure (4.7 Résultats d’optimisation par la méthode hybride (SA-QN) 107 Figure (4.8) Résultats d’optimisation par la méthode hybride (SA-PS) 107 Figure (4.9) Résultats d’optimisation par la méthode hybride (TS-QN) 108 Figure (4.10) Résultats d’optimisation par la méthode hybride (TS-PS) 108 Figure (4.11a) Lignes équipotentielles dans la pompe MHD optimisée 110 Figure (4.11b) Distribution du potentiel vecteur magnétique dans la pompe MHD en 2D
111 Figure (4.11c) Distribution du potentiel vecteur magnétique dans la pompe MHD en 3D
111
Figure (4. 12a) Induction magnétique dans la pompe MHD optimisée en 3D 112 Figure (4. 12b) Induction magnétique dans la pompe MHD avec et sans
optimisation
112 Figure (4.13a) Densité de courant induit dans la pompe MHD à conduction avec
optimisation en 3D.
112 Figure (4.13b) Densité de courant induit dans la pompe MHD à conduction avec
optimisation en 2D.
113 Figure (4.14) Distribution de la force électromagnétique dans la pompe MHD à
conduction avec et sans optimisation
12
Figure (4.15a) Géométrie de la Pompe MHD 115 Figure (4.15b) Conditions aux limites appliquées 115 Figure (4.15c) Maillage de la pompe MHD 116 Figure (4.15d) Lignes équipotentielles dans la pompe MHD 116 Figure (4.16) Induction magnétique dans la pompe MHD
(a) Par ANSYS (b) Par volumes finis
117
Figure (4,17) Force électromagnétique dans la pompe MHD 118 (a) Par ANSYS
13
Liste des Tableaux
Tab. 1.1 Analogie entre un moteur à courant continu et un propulseur MHD à courant continu
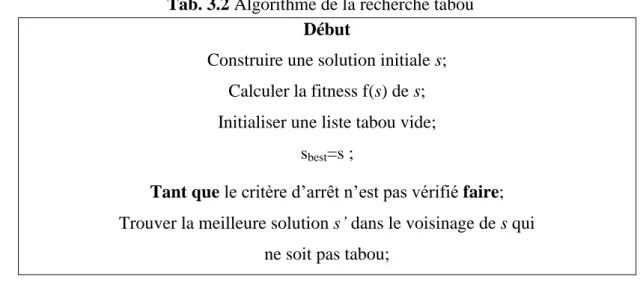
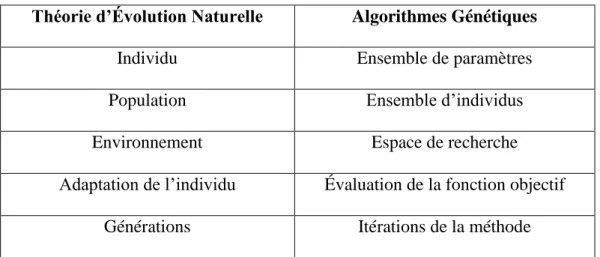
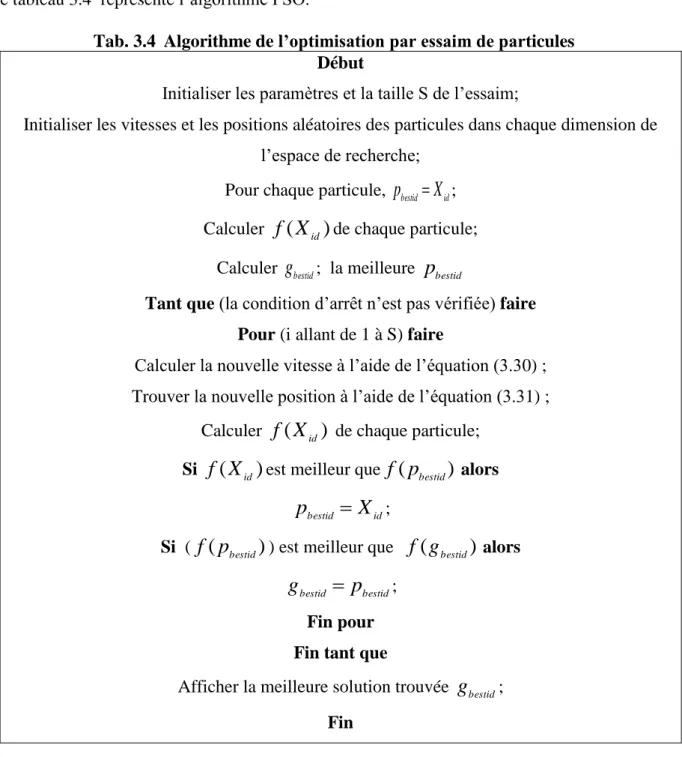
24 Tab. 3.1 Analogie entre un problème d’optimisation et le recuit 76 Tab. 3.2 Algorithme de la recherche Tabou 80 Tab. 3.3 Analogie entre les AG et la théorie d’évolution naturelle 82 Tab. 3.4 Algorithme de l’optimisation par essaim de particules 91 Tab. 3.5 L’algorithme de colonies de fourmis 93 Tab. 4.1 Résultats des méthodes stochastiques 102 Tab. 4.2 Résultats des méthodes déterministes 103 Tab. 4.3 Résultats des méthodes hybrides 105
14
La magnétohydrodynamique (MHD) est l’étude de l’interaction des champs magnétiques et des écoulements de fluide conducteurs. Cette discipline s’attache à des phénomènes très variés de l’échelle du laboratoire (pour les métaux liquides et les gaz ionisés) à l’échelle planétaire (champ magnétique terrestre). La conversion MHD est l’une des applications de cette discipline. Elle concerne la conversion de l’énergie mécanique du mouvement d’un fluide en énergie électrique. Ce mécanisme permet de transformer directement le mouvement d’un fluide en électricité sans passer par des turbines comme dans les centrales classiques. Ceci est un avantage par rapport aux machines classique connues. La conversion peut également s’effectuer en sens inverse ; on utilise l’énergie électrique pour mettre un fluide en mouvement, on obtient ainsi des pompes électromagnétiques [LEB 92a].
Ces pompes sont conçues dans le but de n’avoir aucune partie mobile et sont ainsi débarrassées de problèmes d’usure et de fatigue provoqués par la basse pression à travers les pièces mécaniques. Comparées à d’autres types de pompes non mécaniques, les pompes magnétohydrodynamiques montrent plusieurs avantages ; à savoir la simplicité de fabrication et des forces continues de pompage [BER 91], [BER 13].
L’application première des pompes électromagnétiques a été le pompage du sodium pour le refroidissement des réacteurs nucléaires. Dès les années 1970, ces pompes ont été utilisées pour le pompage des métaux liquides à haute température comme le zinc et l’aluminium. Aujourd’hui elles sont utilisées dans d’autres domaines comme le domaine médical ou la microélectronique (électrolytes, plasmas) (Baker et Tessier 1987). Elles sont l’une des applications de la magnétohydrodynamique (MHD) qui est à la frontière de deux sciences, la mécanique des fluides et l’électromagnétisme [TAW 11].
Les applications de la magnétohydrodynamique sont très larges et dans des échelles très variées, dans l’industrie métallurgique, le transport ou le pompage des métaux liquides en
15
fusion par des pompes électromagnétiques. Il existe aussi des vannes et des débitmètres électromagnétiques.
L’élaboration d’un système passe en premier lieu par la connaissance de son comportement, c’est la phase d’analyse. Celle-ci doit déboucher sur une description mathématique des phénomènes physiques qui régissent le comportement des éléments du système, c’est la phase de modélisation. Cette dernière sert de support à la conception car elle permet de prédire les performances du système en fonction de ses caractéristiques, [JAN 10].
Généralement les dispositifs électromécaniques sont dimensionnés à partir d’équations analytiques classiques avec des hypothèses simplificatrices. Ces équations ont été améliorées dans le temps par retour d’expériences sur les différents dispositifs construits. Cependant, de par son caractère limité et la diversité de plus grande des applications projetées, cette connaissance pratique ne permet pas toujours d’optimiser toutes les caractéristiques géométriques, [TAI 02].
Depuis quelques années, les recherches dans le domaine de conception des dispositifs électromagnétiques s’orientent vers l’optimisation par le biais de différentes approches. Ces dernières sont plus ou moins contraignantes et précises. En effet, les paramètres à optimiser sont souvent interdépendants et il est difficile de trouver la solution optimale prenant en compte les différentes interactions. En fait, trouver la solution optimale d’un problème dans un espace complexe implique un compromis entre deux objectifs : l’exploitation des meilleures solutions et l’exploration robuste de l’espace de recherche. Les méthodes d’optimisation de type grimpeur procèdent itérativement en tentant, à chaque pas, de trouver localement une solution intermédiaire meilleure que la solution courante ; ce genre de méthodes est pénalisé par son incapacité à traiter des problèmes représentant des reliefs de solutions multimodales (systèmes possédant plusieurs optimums locaux), [TAI 02].
Etant donnée l’importance de l’optimisation des structures en génie électrique, de nombreuses méthodes de résolution ont été développées. Ces méthodes peuvent être classées sommairement en deux grandes catégories : les méthodes déterministes et les méthodes stochastiques.
16
Le principe essentiel d’une méthode exacte consiste à converger vers l’optimum le plus proche du point de départ, qu’il soit local ou global ; ce sont souvent des méthodes locales. Parmi ces méthodes, on peut citer : la méthode de la plus grande pente, le gradient Conjugué, la méthode de Powell et la méthode de Quasi-Newton et les méthodes géométriques, telles que la méthode du Simplex et la méthode de Rosenbrock.
Les méthodes probabilistes constituent une alternative très intéressante pour traiter les problèmes d’optimisations de grande taille si l’optimalité n’est pas primordiale. En effet, ces méthodes sont utilisées depuis longtemps par de nombreux praticiens. On peut citer les méthodes gloutonnes et l’amélioration itérative, [KON 93].
Depuis une dizaine d’années, des progrès importants ont été réalisés avec l’apparition d’une nouvelle génération de méthodes approchées puissantes et générales, souvent appelées méta heuristiques. Les heuristiques sont représentées essentiellement par les méthodes de voisinage comme le recuit simulé, la recherche tabou et les algorithmes génétiques.
2. Problématique
Nous sommes donc confrontés à un problème de conception d'une nouvelle structure de pompe magnétohydrodynamique MHD à conduction alimentée par un courant continu. Il est donc indispensable d'effectuer sa modélisation. Actuellement, il existe deux types de modélisations :
la modélisation par calcul de champs, dite numérique, qui repose sur la résolution des équations de Maxwell;
La modélisation analytique.
Le problème de conception est un problème ouvert et souvent itératif, plus de variables que d’équations et donc n’admet pas une solution unique. A cet effet, pour une solution rationnelle, il est intéressant de formuler le problème de conception comme étant un problème d’optimisation avec contraintes [KON 93].
Cette démarche implique beaucoup de variables (les dimensions de la machine, les contraintes du cahier des charges etc. …) et donc beaucoup de calculs et la recherche de la meilleure solution nécessite plusieurs balayages sur les intervalles de variation de ces variables. Par conséquent, l’utilisation, d’un modèle de la machine basée sur la méthode
17
des élément finis, risque d’être très lourd alors, on préfère, surtout quand l’optimum n’est pas encore localisé, un modèle moins lourd par la méthode des volumes finis.
La modélisation par élément finis, reste la plus précise, cependant plus lourde et s’apprête mal pour une utilisation durant la conception. Elle est donc réservée pour des études plus fines des performances des systèmes.
3. Objectif de la thèse
L’objectif de cette thèse est donc d’étudier et de concevoir par optimisation une pompe à conduction basée sur la mise en mouvement d’un fluide conducteur. Des résultats de simulation d’un code de calcul développé à base de la méthode des volumes finis en 2D, simulant la pompe en régime statique seront présentés et validés par ceux obtenus par le logiciel de calcul ANSYS. Ensuite, le problème de conception par optimisation de la pompe considérée sera abordé par l’application de plusieurs méthodes à savoir les méthodes stochastiques et les méthodes déterministes. Des méthodes hybrides utilisant une méthode stochastique avec une méthode déterministe sont aussi utilisées. Finalement, une validation de la structure optimisée par la méthode des éléments finis (ANSYS) sera effectuée. Les résultats obtenus seront analysés et des recommandations nécessaires seront faites.
4. Structure de la thèse
Le travail exposé dans ce mémoire s’articule autour de quatre principaux chapitres : Dans le premier chapitre, nous présentons l’état de l’art de la magnétohydrodynamique. Le chapitre deux est consacré à la modélisation des phénomènes électromagnétiques. Il s’agit de développer un modèle en 2D par la méthode des volumes finis.
Le chapitre trois propose un état de l’art des méthodes d’optimisation. Deux grandes familles de méthodes seront présentées: les méthodes déterministes et les méthodes stochastiques. Nous allons montrer les caractéristiques principales de chaque famille, leurs points forts et faibles.
18
Dans le dernier chapitre nous appliquerons la procédure de conception proposée pour dimensionner une pompe magnétohydrodynamique MHD à conduction. Pour cela, nous avons retenu des méthodes stochastiques (recuit simulé, recherche tabou et les algorithmes génétiques et des méthodes déterministes Quasi-Newton et Pattern Search PS. Des méthodes hybrides utilisant une méthode stochastique avec une méthode déterministe sont aussi utilisées. Finalement, une validation de la structure optimisée par la méthode des éléments finis est réalisée.
Dans la partie finale de la thèse, nous donnerons les conclusions relatives à notre étude et les perspectives qui peuvent être envisagées dans le futur.
Chapitre un
Etat de l’Art des
19
1.1 Introduction
La magnétohydrodynamique (MHD) est à la frontière de deux sciences, la mécanique des fluides et l’électromagnétisme. Elle consiste en l’étude de l’interaction entre un écoulement de fluide conducteur et des champs magnétiques et électriques. Sa naissance remontre au 19éme siècle, lorsque Faraday écrivit les lois de l’induction magnétique (1831). Elles montrent l’existence d’une force électromotrice induite dans un écoulement soumis à un champ magnétique. Cette force est susceptible de créer des courants qui peuvent agir avec le champ magnétique pour donner naissance à des forces de Laplace.
Dans ce travail, on s’intéresse particulièrement à la machine MHD à conduction à courant continu ; mais il nous est apparu plus intéressant d’aborder l’état de l’art des convertisseurs MHD.
1.2 Historique de la magnétohydrodynamique
Les premières études sur la propulsion MHD en milieu océanique datent de la fin des années 1950 aux Etats-Unis. En 1958 l'ingénieur Stewart Way, du département R&D de Westinghouse à Pittsburgh, publie un premier rapport officiel sur le sujet. En 1961, Warren A. Rice dépose le premier brevet [RIC 61], en parallèle aux travaux des américains James B. Friauf et O. M. Philips [FRI 60], [PHI 62].
Un second rapport de Stewart Way est publié en 1964 par l'ASME (American Society of Mechanical Engineers). En 1966, S. Way teste avec succès le premier modèle réduit de sous-marin à propulsion MHD muni de deux électrodes, long de 3 mètres et pesant 400 kilos, dans la baie de Santa Barbara en Californie. Ces recherches sont stoppées durant la décennie suivante, à cause de l'impossibilité de fabriquer les bobines produisant de très forts champs magnétiques nécessaires à un rendement MHD correct. Les Soviétiques continuent cependant les recherches militaires sur la propulsion MHD des sous-marins afin de rendre ceux-ci silencieux et donc discrets.
20
La disponibilité d'électroaimants supraconducteurs, capables de produire les champs magnétiques nécessaires (plusieurs teslas), relance ensuite ces études. Aux USA, celles-ci sont destinées en priorité aux submersibles de l'US Navy. Dans les années 1990, l'Université de Pennsylvanie mène des expériences au FBNML (Francis Bitter National Magnet Laboratory) du MIT (Massachusetts Institute of Technology) en circuit fermé sur une configuration hélicoïdale et obtient des vitesses d'écoulement de 3,7 mètres par seconde et un rendement de 10 % avec un champ magnétique de 8 teslas. En parallèle à ces recherches universitaires, l'US Navy publie à la même époque plusieurs brevets décrivant des sous-marins à propulsion MHD [BEN 10].
Les Japonais mènent des recherches civiles sur la propulsion MHD depuis les années 1970. L'université de la marine marchande de Kobé réalise en 1976, sous la direction du physicien Yoshiro Saji, une première maquette suivie d'une seconde de 3,6 mètres de long pesant 700 kilos en 1979, et envisage à cette époque la future construction d’une brise glace sans hélices propulsé par MHD, [TAD 84]. Le premier véritable navire à propulsion MHD, le Yamato 1 (utilisant 12 accélérateurs linéaires de Faraday) navigue pour la première fois en 1992, [TAD 84], [BEN 10].
La Chine teste également à la fin des années 1990 un prototype de bateau à propulseur MHD hélicoïdal muni d'un électroaimant de 5 teslas, le HEMS-1 et entreprend un partenariat avec le Japon pour tester la propulsion MHD en laboratoire avec des champs magnétiques de grande intensité (15 teslas), [BEN 10].
En France, la MHD est restée longtemps associée à la production de l’énergie électrique en utilisant le mouvement des gaz ionisés soumis à un champ magnétique. A partir de 1969, date à laquelle cette activité a été mise en sommeil et définitivement arrêter car la rentabilité à l’échelle industrielle fut estimée trop faible vu les problèmes plutôt technologiques rencontrés (tenue et qualité des matériaux) que dans les principes mis en jeu [BER 91], [KAD04], [BEN 10].
21
1.3 Apport et limites des machines tournantes
Les machines électriques rotatives ont occupé une grande place dans l’industrie depuis bien longtemps, mais ces dernières ne peuvent pas régler tous les problèmes, comme le transport des métaux liquides, le pompage, etc… Beaucoup de progrès et développements ont été réalisés dans le domaine des machines linéaires dont les applications sont relativement nouvelles. Plusieurs revues et documents techniques se sont penchés sur ce sujet durant ces deux dernières décennies. Ainsi la technologie a évolué et les pompes MHD ont pris places dans différents domaines comme la métallurgie et dans les centrales nucléaires.
Le pompage des métaux liquides par des convertisseurs MHD qui sont entrain de concurrencer les pompes hydrauliques conventionnelles à cause des problèmes tels que [BOL 85], [KAD 06] :
L’usure à haute température ;
L’étanchéité contre les fuites du métal liquide.
I.4 Les convertisseurs MHD linéaires
La Magnétohydrodynamique est la manière d'agir sur un fluide, liquide ou gaz, en faisant agir sur lui des forces électromagnétiques, à condition qu'il soit suffisamment conducteur de l'électricité. On parlera alors d'accélérateur MHD. C'est également l'art de transformer l'énergie cinétique d'un fluide en énergie électrique. On parlera alors de générateur MHD. Plus généralement, dans la mesure où s'opère une conversion directe d'une forme d'énergie en une autre forme d'énergie (cinétique, électromagnétique) on parlera de convertisseur MHD, [KAD 04], [BER 13].
Le système le plus simple est celui du convertisseur à induction. Il est constitué d’un canal dans lequel s’écoule un fluide électriquement conducteur à la vitesse V. Le fluide traverse un champ magnétique B qui induit un courant J collecté par des électrodes en contact avec le fluide, [LEB 92b].
La première expérience de la conversion MHD avec un liquide comme fluide a été réalisée par Arago qui eut l’idée d’utiliser les propriétés conductrices d’un fluide en mouvement dans
22
un champ d’induction magnétique, après le découverte par faraday des lois de l’induction. Ce n’est qu’en 1955 qu’une application industrielle a été envisagée mais dans laquelle le liquide fut remplacé par un gaz conducteur. L’étude fut alors qualifiée de magnétohydrodynamique ce qui parut de prime abord surprenant. Mais le paradoxe n’est qu’apparent, cette appellation était légitime puisque les recherches menées au début sur ces milieux (plasma) faisant intervenir des équations semblables à celles de l’hydrodynamique [BER 91], [LEB 92b], [BOR 97].
La magnétohydrodynamique des plasmas a fait l’objet de travaux conséquents, mais cela n’empêche pas d’évoquer la MHD des métaux liquides dont les avantages ne sont pas négligeables. En effet, à cause des problèmes associés à la température élevée des plasmas, plusieurs approches sont apparues utilisant le métal liquide comme fluide conducteur. Les systèmes à métaux liquides semblent être particulièrement très demandés et beaucoup de travaux ont été élaborés aux USA et en URSS et un grand programme est établi en France [LEB 92], [KAD 01].
Les convertisseurs MHD sont principalement utilisés dans l’industrie sous forme de pompes électromagnétiques, dans les aspects propulsifs de véhicules de haute technologie ainsi que pour certains types d’armes militaires.
En général, il existe deux catégories de machines MHD linéaires : convertisseurs MHD linéaires à conduction ;
convertisseurs MHD linéaires à induction.
1.4.1 Les convertisseurs MHD linéaires à conduction
Les machines MHD linéaires à conduction peuvent fonctionnent principalement comme moteur pompe. Dans ce type de pompe, le courant électrique est fourni par une source extérieure et le champ magnétique est imposé. Une limitation essentielle est le manque d’adhérence du métal sur les parois, ce qui augmente les pertes.
Il existe plusieurs formes de pompes à conduction, parmi lesquelles on peut citer [BER 91], [BOL85] :
23
Les pompes à conduction à alimentation continue ; Les pompes à conduction à courant alternatif.
La différence entre ces deux types de pompes se situe au niveau de l’alimentation bobinage qui peut être soit en courant continu soit en courant alternatif.
Les pompes magnétohydrodynamiques à conduction sont constituées d’un canal dans lequel s’écoule un fluide électriquement conducteur à la vitesse . La figure (1.1) représente le schéma d’une telle pompe. L’interaction entre l’induction magnétique B et le courant I injecté
par les électrodes donne naissance à une force de Laplace
L
F .
Les différentes parties qui constituent la pompe magnétohydrodynamique à conduction sont : le circuit magnétique : il est destiné à créer et canaliser les lignes de champ
magnétique dans le canal ;
le canal dans lequel s’écoule le fluide électriquement conducteur ;
les deux électrodes en contact avec le fluide conducteur : elles servent à injecter le courant I à l’intérieur du canal. Elles sont réalisées avec un matériau bon conducteur d’électricité ;
l’alimentation électrique généralement avec un fort courant et une basse tension
Alimentation courant DC Canal Électrodes Circuit Magnétique I FL B
Fig.1.1 Schéma d'une pompe MHD à conduction Canal
Électrodes Circuit Magnétique
Fig. (1.1) Schéma d'une pompe MHD à conduction B
I FL
24
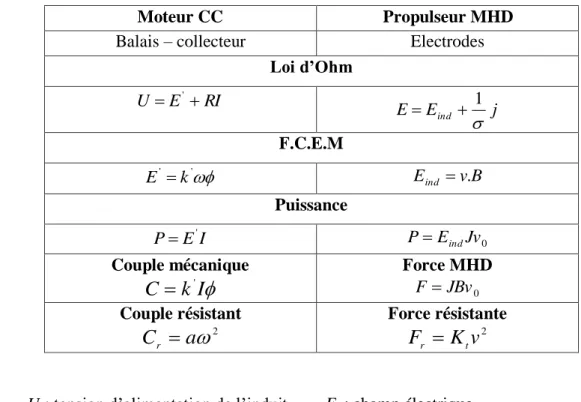
L’analogie entre un moteur à courant continu et un propulseur MHD à courant continu peut se résumer comme suit :
Tab. 1.1 Analogie entre un moteur à courant continu et un propulseur
MHD à courant continu
Moteur CC Propulseur MHD
Balais – collecteur Electrodes
Loi d’Ohm RI E U ' j E E ind 1 F.C.E.M ' ' k E Eind v.B Puissance I E P ' PEindJv0 Couple mécanique
I
k
C
' Force MHD 0 JBv F Couple résistant 2
a
C
r
Force résistante 2v
K
F
r
t oùU : tension d’alimentation de l’induit E : champ électrique
E’ : F.C.E.M. du rotor Eind : champ électrique induit
R : résistance totale de l’induit σ : Conductivité électrique
I : courant traversant l’induit J : densité de courant électrique ω : vitesse de rotation rd/s v : vitesse du fluide en m/s
'
k
;a
constantes : flux d’excitationv
K
t;
constante et vitesse du fluideB : induction magnétique
1.4.1. 1 Pompes MHD à conduction à courant continu
La pompe magnétohydrodynamique à conduction à courant continu (MHD DC) est le modèle le plus simple de pompe MHD. Les courants dans le canal et dans le bobinage inducteur (cas d’un électroaimant) sont continus. Pour créer le champ magnétique, nous pouvons aussi utiliser un aimant permanent. Le circuit magnétique peut être refermé par un
25
barreau de fer pour éviter les fuites magnétiques vers l’extérieur et obtenir une induction élevée. La figure 1.2 représente le schéma d’une pompe MHD à courant continu avec un canal rectangulaire et dont l’induction magnétique est créée par des électroaimants.
La figure (1.3) montre le schéma d’une nouvelle génératrice magnétohydrodynamique à l’eau de mer avec un aimant supraconducteur de 7 T, [TAK 05].
Un des principaux avantages des pompes DC MHD est la simplicité de leur géométrie. Leur coût de fabrication est relativement faible devant les autres types de pompes MHD. En
Bobinage Circuit magnétique
Electrodes
Ecoulement du fluide
Fig. (1.2) : Pompe MHD à conduction à courant continu [TAW11]
I
B
Fig. (1.3) Principe d’un générateur MHD à l’eau de mer type hélicoïdal [TAK 05] Résistance externe Ecoulement de l’eau de mer Aimant supraconducteur Mur hélicoïdal Cathode Anode Cathode Anode
26
revanche ce type de pompe présente plusieurs défauts. En effet, les électrodes peuvent subir une érosion à cause du frottement avec le fluide, et les pertes ohmiques peuvent provoquer un échauffement, il peut également exister une résistance de contact non négligeable entre le fluide et les électrodes. Ceci provoque donc des pertes thermiques supplémentaires. Par le passé, de nombreuses pompes MHD à conduction DC ont étés fabriquées avec différents types de fluides conducteurs (plasmas, électrolytes, sels fondus et métaux liquides).
I.4.1.2 Pompes MHD à conduction à courant alternatif
Dans le cas des pompes magnétohydrodynamiques à courant alternatif (MHD AC), les courants dans le fluide et dans le bobinage sont sinusoïdaux. Le courant I traversant le canal de pompage peut donc être fourni en sortie d’un transformateur, et le champ magnétique par un électro-aimant (figure (1.4)).
L’utilisation d’un transformateur permet d’avoir une alimentation des électrodes très simple car il est assez complexe d’obtenir des alimentations DC à fort courant et faible tension ayant un bon rendement. Par contre, pour des courants élevés, un refroidissement des transformateurs est nécessaire. Le champ magnétique et le courant dans le fluide doivent avoir
Circuit magnétique Transformateur Electrodes Transformateu r Canal Ecoulement du fluide
27
la même fréquence. La force de pompage est maximale si le champ magnétique et le courant sont en phase d’où l’idée d’avoir la même alimentation pour le courant I et l’induction magnétique, [LAB 92a], [BER 91] et [TAW 11].
La circulation du fluide est toujours basée sur la force de Laplace où nous avons une variation temporelle du courant et du champ.
Un des principaux avantages des pompes MHD DC est la simplicité de leur géométrie. Leur coût de fabrication est relativement faible devant les autres types MHD. En revanche ce type de pompe présente plusieurs défauts. En effet, les électrodes peuvent subir une érosion à cause du frottement avec le fluide, et les pertes ohmiques peuvent provoquer un échauffement ; il peut également exister une résistance de contact non négligeable entre le fluide et les électrodes. Ceci provoque donc des pertes thermiques supplémentaires,[TAW11].
L’étude qui sera faite dans les chapitres suivants portera sur les pompes à conduction à courant continu à métal liquide destinées à la propulsion ou au transport des métaux liquides.
1.4.2 Les convertisseurs MHD linéaires à induction
Le principe général d’une pompe à induction consiste à créer un champ magnétique glissant avec des enroulements polyphasés (en général triphasés). Ce dernier induit des courants dans le fluide conducteur qui crée à leur tour une force de Laplace tendant à le mettre en mouvement. Ce fonctionnement est très proche de celui de la machine asynchrone, mais ici le champ créé est glissant, et l’induit est constitué par le fluide conducteur. La figure (1.5) montre les courants induits dans les pompes à induction [TAW 11].
Les différentes parties d’une pompe à induction sont :
l’inducteur : constitué d’un circuit magnétique créant un champ glissant grâce à un bobinage polyphasé ;
l’induit : constitué par un fluide conducteur ; l’entrefer
28
Il existe plusieurs types de pompes à induction. Les plus utilisées dans l’industrie sont les pompes plates et les pompes annulaires. La différence entre ces deux types apparait au niveau de leurs géométries.
1.4.2.1 Différentes géométries de pompes à induction
1.4.2.1.1 Pompes à induction plates
L’idée de base du fonctionnement des pompes plates est la même que précédemment. Elles ressemblent beaucoup au moteur linéaire ; le rail est remplacé par le fluide. Le canal a une section rectangulaire. Des enroulements inducteurs alimentés par des courants alternatifs triphasés génèrent une induction magnétique sinusoïdale glissante. La figure (1.6) montre le schéma d’une pompe MHD à induction plate. Le liquide circule dans un canal rectangulaire.
Fig. (1.5) Lignes de courant dans une pompe MHD à induction [TAW11]
Induction magnétique crée par des inducteurs
Fig. (1.6) Pompe MHD à induction plate [BER 91]
Entrée du fluide
Circuit magnétique
Bobinage polyphasé
29
Le refroidissement se fait par circulation forcée d’air dans les inducteurs. Les problèmes technologiques portent surtout sur la réalisation de conduits en tôle d’acier inox mince (pour diminuer les pertes) résistant longtemps à la corrosion et d’une étanchéité absolue [BER 91].
1.4.2.1.2 Pompes à induction annulaires
Le principe de fonctionnement de ces pompes ne diffère pas des moteurs classiques. Le courant des enroulements primaires produit un champ magnétique de déplacement qui produit à son tour un courant induit dans le métal liquide. L’interaction entre le champ principal et le courant induit donne naissance à des forces appliquées au niveau du liquide. Les pompes à induction présentées dans la littérature ont en général une taille assez conséquente. En effet, leurs circuits magnétiques et leurs bobinages assez complexes ne permettent une miniaturisation que dans le cas des pompes à conduction, [TAW 11].
La figure (1.7) montre le schéma d’une pompe MHD à induction annulaire. Le type annulaire est plus performant que le type rectangulaire car les courants induits sont toujours perpendiculaires à la direction de l’écoulement. Ainsi, la force de Laplace a partout la même direction que celle de l’écoulement. Par contre, dans le cas d’une machine de section rectangulaire, les courants induits se referment d’une façon moins favorable aux échanges d’énergie mécanique en énergie électrique et provoquent d’avantage des pertes par effet Joule, [DUD 68].
30
Les avantages de ces pompes sont les suivants, [BEN 99]:
Les courants électriques se referment dans la masse du fluide, ce qui rend inutile l’adhérence de celui- ci sur la paroi ;
La forme est simple et l’encombrement est économique ; Le démontage est facile.
1.4.2.2 Régimes de fonctionnement
La machine MHD fonctionne en pompe si le champ magnétique se déplace plus vite que le fluide. Le fluide est entrainé par le champ qui crée une force de Laplace dans le sens l’écoulement. L’énergie électrique des sources de courant est transformée en énergie mécanique dans le fluide. Si au contraire le champ se déplace moins vite que le fluide, la MHD fonctionne en générateur. Le fluide est freiné par le champ magnétique et le travail des forces électromagnétiques est transformé en énergie électrique dans les bobinages et en pertes joules dans le fluide. Dans ce cas, le générateur peut être connecté à un réseau électrique auquel il fournira une certaine puissance, [LEB 92].
1.4.3 Choix du fluide conducteur
Les métaux liquides fonctionnement à des températures plus basses que celles des plasmas et par conséquent n’entrainent pas d’usure des électrodes. C’est pour cette raison qu’on choisit les métaux liquides à point de fusion bas tels que (Hg, K, Ca, Sn, Zn, NaK), [LEB92b], [CON 95] et [BER 13].
Dans le cas des convertisseurs linéaires à induction, on choisit généralement le mercure ; c’est un métal liquide à température ordinaire. C’était le milieu le plus pratique pour effectuer les premières expériences de MHD (Hartmann et Lazarus 1937), [BER 91]. Cependant un autre métal a suscité de grandes recherches, le sodium fondu, pur ou allié au potassium. En effet, ce liquide est utilisé pour le refroidissement et l’exploitation de certains réacteurs nucléaires. Le mélange sodium potassium rend le composé liquide à la température ambiante, [KAD 04].
31
1.5 Comparaison entre les pompes à conduction et à induction
La description des pompes de façon générale, montre que chaque type de pompes présente ses propres avantages et inconvénients [BOR 98].
La fabrication des pompes MHD DC a un coût relativement faible par rapport aux autres types. De plus, elles fonctionnent avec des aimants permanents ce qui simplifie leur réalisation. Les principaux inconvénients sont l’alimentation électrique qui est complexe et la présence d’électrodes.
La pompe MHD à conduction à courant alternatif peut être plus facilement alimentée mais demande la présence d’un électro-aimant. De plus, le courant alternatif entraine la présence de courant de Foucault.
L’avantage principal des pompes à induction réside dans l’absence d’électrodes contrairement aux pompes MHD à conduction.
1.6 Domaines industriels d’application de la MHD
1.6.1 Génération de l’électricité par la MHD
Les recherches approfondies de génération d'électricité par MHD ont débuté au XXe siècle, tout d'abord avec le physicien Bela Karlovitz pour le compte de la société Westinghouse de 1938 à 1944. Ce générateur MHD était de type "Hall annulaire" et utilisait un plasma issu de la combustion du gaz naturel ionisé par faisceaux d'électrons. Cette expérience ne fut pas convaincante car la conductivité électrique du gaz était aussi limitée que les connaissances de l'époque en physique des plasmas. Une seconde expérience menée en 1961 au même laboratoire, utilisant un liquide composé d'un combustible fossile enrichi en potassium, fut elle un succès avec une puissance générée excédent 10 kW. La même année, une puissance identique fut générée aux laboratoires Avco Everett par le docteur Richard Rosa, en utilisant de l'argon enrichi par pulvérisation d'une poudre de carbonate de potassium (substance donnant facilement des électrons libres, ce qui augmente la conductivité électrique du plasma) et ionisé par arcs électriques à 3000°K, [BER 06]. Les années 1960 virent un effort international très important en vue de créer les premières centrales MHD électriques industrielles, avec un gaz ionisé à très haute vitesse comme fluide conducteur.
32
En 2007, un ensemble d'expériences concluantes réalisées aux États-Unis pour le compte de l'armée américaine, avec un fluide simulant une sortie de tuyère d'un avion hypersonique a permis d'obtenir une puissance générée supérieure à 1 MW. Ce type d'expérience est susceptible de relancer l'intérêt (notamment militaire) de la MHD, après une "mise en sommeil" de cette technique pendant de nombreuses années. Cette expérience est susceptible d'avoir également un impact sur la fusion contrôlée.
1.6.1.1 Générateurs à conduction
Un générateur MHD (magnétohydrodynamique) est un convertisseur MHD qui transforme l'énergie cinétique d'un fluide conducteur directement en électricité. Le principe de base est fondamentalement le même que pour n'importe quel générateur électrique. Les deux types de générateurs utilisent un inducteur (électroaimant ou aimant permanent) générant un champ magnétique dans un induit ou canal.
Dans le cas d'un générateur conventionnel, cet induit est solide : c'est une pièce métallique portant des bobines en cuivre.
Dans le cas d'un générateur MHD, cet induit est fluide : liquide conducteur (eau salée, métal liquide) ou gaz ionisé (plasma).Les générateurs MHD n'utilisent donc pas de pièce mécanique mobile, contrairement aux générateurs électriques traditionnels. Le fluide est mis en mouvement dans le champ magnétique, ce qui génère un courant électrique, recueilli aux bornes d'électrodes immergées et connectées à une charge, [BER 13], [GOF 65].
Fig. (1.8) Générateur MHD à Conduction (tuyère linéaire)
Entrée Electrodes
segmentées Solénoïdes
33
1.6.1.2 Générateurs à induction
Le générateur à induction ne comporte pas d’électrodes car le courant est produit par un champ magnétique induit par le couplage champ- vitesse. C’est un premier avantage. De plus, le courant produit est alternatif, ce qui élimine le besoin d’un convertisseur comme dans le cas des générateurs à conduction [KAD 04].
Ce générateur MHD fonctionne sans électrodes avec des champs magnétiques variables. Classiquement, une "onde magnétique" se déplace dans le fluide, émise par des courants électriques alternatifs circulant dans plusieurs électroaimants successifs, avec la même amplitude mais en déphasage. La variation du champ magnétique génère des courants induits dans le gaz, qui eux-mêmes génèrent des champs magnétiques induits dont les lignes de champ coupent les enroulements en spires des bobines. Si la vitesse du gaz est supérieure à la vitesse de déplacement de l'onde magnétique, les courants induits seront tels que les forces de Lorentz générées auront tendance à ralentir l'écoulement et à générer par induction un courant dans les bobinages triphasés analogue à celui des moteurs asynchrones ou linéaires. (Figure (1.9) [ALE 10], [GOF 65], [BER 13].
34
1.6.2 Propulseurs MHD
1.6.2.1 Propulseurs à plasma
Ces dispositifs également appelés MPD (Magneto Plasma Dynamic) utilisent des gaz tels que Argon Comme propergol. Pour des puissances développées de 4 à 10 MW, les rendements de ces appareils sont de l’ordre de 30% à 40%. Ce type de propulseur, bien adapté aux changements d’orbites, offre l’avantage chimique de consommer 3 à 10 fois moins de propergol qu’un propulseur chimique habituel [BER 91]. L’inconvénient majeur est du à l’érosion des surfaces isolantes par le fluide chaud, comme pour le générateur MHD. Il en résulte une perte de masse qui limite la durée de vie du matériel.
Leur principe de fonctionnement est le suivant : le propergol est injecté entre les électrodes et traversé par un courant électrique. Celui-ci induit dans le plasma un champ magnétique qui par couplage avec le courant électrique produit une force de Laplace qui accélère le plasma.
1.6.2.2 Canon électromagnétique
Le canon électromagnétique est tout à fait analogue à un moteur linéaire à courant continu, le plasma joue le rôle de l’armature et les rails celui d’enroulement. Il a comme caractéristique principale de garder une pression à peu près constante pendant l’accélération du projectile.
Ce dispositif inventé par le géophysicien K. Birkeland a des applications variées, [BER 91]. Lancement de charges spatiales ; déchets nucléaires ;
Armes militaires ; destruction de missiles en vol ;
Fusion nucléaire ; initiation des réactions par impact (150 Km/s).
1.6.2.3 La Propulsion navale
Ces dernières années la MHD a connu un regain d’intérêt dans le domaine de la propulsion des bateaux dont le fluide conducteur (eau de mer) utilisé est de conductivité électrique basse. Ceci est du à l’avènement des supraconducteurs qui a engendré le renouveau des recherches sur cette technique. Et avec l’augmentation des inductions magnétiques au environ de 10 Teslas, les rendements ont nettement augmenté en passant de 8% à 60%. Des systèmes à induction et à conduction sont à envisager, [BER 91].
Le principe de base de la propulsion MHD navale est simple. Il consiste à utiliser des forces électromagnétiques pour propulser des navires. Ces forces de Laplace sont issues de
35
l’interaction entre un champ magnétique, crée par des bobines supraconductrices et des courants électriques circulant dans l’eau de mer. Ainsi, l’énergie électrique, fournie par des groupes électrogènes embarqués à bord, est directement transformée en énergie mécanique, [TRO 95].
La magnétohydrodynamique (MHD) permet une propulsion directe des navires par réaction en supprimant l’hélice et toute pièce mécanique mobile d’entraînement. L’action combinée dans l’eau de mer, d’un champ magnétique et d’un champ électrique développe un champ de forces électromagnétiques volumiques que l’on appellera force MHD.
Le Yamato 1 est un démonstrateur technologique civil japonais de navire à propulsion électromagnétique (utilisant les principes de la magnétohydrodynamique) conçu à partir de 1985 et réalisé au début des années 1990. Il se déplace silencieusement jusqu'à une vitesse de 8 nœuds (15 Km/h) par réaction et sans hélice, grâce à un accélérateur MHD aspirant à l'avant l'eau de mer, naturellement conductrice de l'électricité, et la rejetant à l'arrière, [MOT 91], [BEN 11] (fig. 1.10).
1.6.3 Les Applications à la métallurgie
1.6.3.1 Magnétohydrodynamique des fours à induction
Les fours à induction se composent essentiellement d’une bobine inductrice refroidie par circulation d’eau, entourant un creuset dans lequel se trouve la masse métallique à fondre et a traiter [SAA 06]. L’utilisation des champs magnétiques alternatifs dans les fours à induction
36
s’est considérablement développée ces dernières années dans les domaines de l’élaboration et le traitement des métaux. En effet, ce type de champ magnétique offre la possibilité d’agir à distance et de façon contrôlée sur un fluide électroconducteur, [KAD 04].
1.6.3.2 Brassage électromagnétique
Les brasseurs électromagnétiques, tout comme les pompes électromagnétiques, ont la particularité de ne pas posséder de parties mobiles. Par brassage, ils entraînent l’élimination de bulles, de saletés et aussi l’accélération du mélange (par turbulence) lors de réactions métallurgiques (fabrication d’alliages).
1.6.3.3
Lévitation
Parmi les procédés de lévitation utilisés en physique ; le procède MHD permet de résoudre trois problèmes à la fois :
L’absence de contact entre la charge et le creuset évite la contamination du métal par la paroi ;
L’échauffement de la charge par effet Joule peut en causer la fusion ;
Le brassage interne du fluide formé produit un mélange efficace des constituants, [BER13].
1.6.3.4 Formage
Le formage électromagnétique consiste à façonner des masses métalliques en lévitation magnétique par l’action de champs magnétiques qui modèlent la surface libre désirée. Cette technique a l’avantage d’éviter le chauffage et le reformage après solidification, [BEN10].
1.6.3.5 Pulvérisation
La technique électromagnétique permet la fabrication de poudres et grenailles de tailles moyennes (environ 100µm) avec un débit massique élevé, [BEN 10].
1.7 Conclusion
Une description générale des convertisseurs MHD ainsi que leurs principes de fonctionnement ont été donnés dans ce chapitre. Les phénomènes magnétiques sont régis par les équations de Maxwell.
Dans ce cas, la mise en équations de ces phénomènes et la modélisation numérique de la machine MHD à conduction retenue est l’objet du chapitre suivant.
Chapitre deux
Modélisation en 2D de la
MHD à Conduction
37
2.1 Introduction
La modélisation de la MHD repose respectivement sur les équations de Maxwell et les équations de Navier Stokes. En utilisant les équations de Maxwell et les lois constitutives du milieu, on détermine les paramètres électromagnétiques relatifs à chaque problème.
Ce chapitre s'intéresse à la modélisation de la pompe MHD à conduction. Cette dernière est effectuée dans l'objectif de l'utiliser dans une procédure de conception par optimisation. Il existe à l’heure actuelle trois niveaux de modélisations :
La modélisation par calcul de champs qui repose sur la résolution des équations de Maxwell. C’est une modélisation qui fait intervenir les grandeurs locales B et
H.
La modélisation par circuit magnétique équivalent. Cette modélisation est dite intégrale puisque elle fait intervenir des grandeurs obtenues par intégration des variables
B et
H et la différence de potentiel magnétique scalaire.
La modélisation par circuit électrique équivalent. Dans ce type de modélisation, on ne fait intervenir que des grandeurs électriques globales (tension et courant). La modélisation par circuit électrique équivalent est la moins précise du fait qu’elle ne peut prendre en considération la saturation que d’une manière globale. Cependant, elle reste le modèle le moins lourd et par conséquent le plus intéressant lorsqu’il est question de la conception ou de la commande des systèmes électromagnétiques.
La modélisation par calcul de champs reste la plus précise, cependant la plus lourde. Elle est donc réservée pour des études plus fines des performances des systèmes électromagnétiques.
Ce dernier type de modélisation dit aussi numérique et avec le développement des ordinateurs, a trouvé un large champ d’utilisation. Les méthodes les plus couramment
38
utilisées, sont les méthodes des éléments finis, des volumes finis ainsi que celles des différences finis.
Ce chapitre est consacré à la modélisation basée sur le calcul des champs par la méthode des volumes finis et son application à l'étude des performances d’une pompe à conduction avec et sans noyau ferromagnétique dans le canal de la pompe à concevoir.
2.2 Méthodes numériques
Les méthodes numériques sont utilisées avec succès dans la plupart des problèmes de la physique. Néanmoins chacune d’elles a son domaine d’application privilégié.
Une description rapide de ces méthodes numériques va nous permettre de déterminer les liens qui existent entre les caractéristiques de ces dernières. C’est sur cette base que s’est effectué notre choix des méthodes numériques pour la modélisation des phénomènes MHD.
2.2.1 Méthodes des différences finies
La MDF est basée sur la discrétisation du domaine d’étude. Elle consiste à décomposer ce dernier en série de Taylor et à ne conserver qu’un nombre restreint de termes.
Ces méthodes sont très utilisées car elles allient une grande simplicité à la possibilité d’obtenir plusieurs schémas de discrétisation selon la précision ou la stabilité désirée.
2.2.2 Méthodes des éléments finis
La méthode des éléments finis est un outil très puissant pour résoudre beaucoup de problèmes en électromagnétisme. Elle a été proposée en 1940. Sa première application en électromagnétisme a été effectuée par Sylvester.
La méthode des éléments finis repose sur la recherche d’une fonction globale représentant les phénomènes étudiés en tout point du domaine analysé. Elle repose sur une approximation nodale du domaine de calcul décomposé en un ensemble d’éléments de
39
géométrie variée (triangle, tétraèdres, hexaèdres). La discrétisation des équations aux dérivées partielles est réalisée à partir de la méthode des résidus pondérés dite de Galerkine qui est la plus utilisée.
La structure de la matrice obtenue après discrétisation est creuse c'est-à-dire qu’elle contient beaucoup de termes nuls [SAD 92], [DHA 84].
Parmi les avantages de cette méthode, on peut citer le traitement possible des géométries complexes ; cependant elle présente une complexité de mise en œuvre et un grand coût en temps de calcul et en mémoire.
2.2.3 Méthodes des volumes finis
La méthode des volumes finis (MVF) est très appliquée pour les problèmes de la mécanique des fluides. La discrétisation des équations aux dérivées partielles s’opère à partir d’une forme conservative pour chaque volume de contrôle par une technique qui ressemble à la méthode des différences finies. Donc le principe de conservation est imposé au niveau de chaque volume de contrôle contrairement à la méthode des éléments finis où les principes de conservation sont vérifiés uniquement de manière globale. Cette méthode est simple à développer et moins coûteuse que la méthode des éléments finis, [PAN 80], [TRI 08].
Le domaine d’étude dans cette méthode est subdivisé en volumes élémentaires de telle manière que chaque volume entoure un nœud du maillage. L’équation est intégrée sur chacun des volumes élémentaires. Pour calculer l’intégrale dans ce volume élémentaire, la fonction inconnue est représentée à l’aide d’une fonction d’approximation entre deux nœuds consécutifs. Ensuite, la forme intégrale est discrétisée dans le domaine d’étude. Cela conduit à une solution plus précise que la méthode des différences finis (MDF). Ces méthodes sont particulièrement bien adaptées à la discrétisation spatiale des lois de conservation [PAN 80], [SHA 11].
40
2.3 Phénomènes électromagnétiques
L’effet du champ électrique ou magnétique (ou de leur combinaison) détermine le fonctionnement des machines tournantes, des pompes et des transformateurs. La connaissance de ces champs permet, dans tout système électromagnétique, d’avoir accès au calcul de ses performances globales et au détail des conditions de son fonctionnement, soit en régime permanent, soit en régime transitoire. En effet, on peut déduire du champ magnétique les valeurs des flux, des forces électromotrices (dans les générateurs), des couples d’entrainement (dans les moteurs) et des forces d’évacuation du fluide dans les pompes [BLO 00], [FLE 06], [KUN 02].
Dans ce qui va suivre, nous présentons les formulations mathématiques modélisant la pompe MHD à conduction et qui expriment les phénomènes électromagnétiques dans la pompe (équations de Maxwell) ainsi que certaines hypothèses permettant de simplifier ces équations.
2.4 Equations de Maxwell
L’ensemble des phénomènes électromagnétiques est régi par les équations de Maxwell. Celles-ci constituent un système d’´equations aux dérivées partielles qui lient les phénomènes magnétiques aux phénomènes électriques unifiant ainsi tous les principes de l´électromagnétisme, [RAP10], [FAR 98].
Les équations de Maxwell représentent la base de l'électromagnétisme; c'est-à-dire que ces équations permettent de décrire les évolutions spatio-temporelles du champ électrique et du champ magnétique. Ces équations locales relient le champ électrique E et le champ magnétique H à leurs sources : densité de charge ρ et densité de courant électrique
J
, [GIE 82], [ABD98] et [SAB 85]:
D
div (équation de Maxwell-Gauss) (2.1)
Une charge électrique est source d’un champ électrique ; autrement dit, les lignes de champs électriques commencent et se terminent autour des charges électriques.
41
0
B
div (équation de conservation du flux magnétique)
(2.2)
Cette relation traduit mathématiquement le fait que les seules sources de champ magnétique sont les courants électriques et il n’existe pas de charge magnétique ; c’est pourquoi les lignes du champ sont toujours fermées sur elles-mêmes. Elles forment des boucles. Ces boucles n’ont ni point de départ, ni point d’arrivée, ni point de convergence, d’où la nomination d’induction conservative (champ conservatif).
t B E rot (équation de Maxwell-Faraday) (2.3) Cette équation exprime le couplage électrique- magnétique en régime dynamique et la
variation temporelle de B. t D J H rot (équation de Maxwell-Ampère) (2.4) En tenant compte des relations constitutives de milieu
H B
et
E
D
dans ces équations, nous pouvons leur ajouter la loi d’Ohm: Jin Jex J (2.5) avec : ( ) E V B Jin (2.6)
Dans cette dernière équation, le premier terme représente la densité de courant induit par conduction tandis que le second terme représente la densité de courant induit par les vitesses dans la décharge.
avec :
in
J : la densité de courant induit et
ex
J la densité de courant source [A/m2] ;
B: l’induction magnétique [T] ;
ρ : la densité volumique de la charge électrique [C/m3
] ;
D: le déplacement électrique ou l’induction électrique [A.s/m2] ; μ : la perméabilité magnétique (dans le vide µ=µ0=4π.10-7[H/m]) ;