Efficient Time Synchronization in a Wireless Sensor Network by Adaptive Value Tracking
Texte intégral
Figure


Documents relatifs
communicating with the Building Information Modelling) which aspires to provide a communicating reinforced concretes, thus, addresses the design and an implementation of
For example, DV-hop based algorithms need the broadcasts of position related information throughout the network leading to problems such as collisions and link
8 shows the average number of sensors detecting the target and the maximal number of outliers in the top plot, the average subpavings areas in semi- log scale in the middle plot and
Near breakdown voltage optical beam induced current (OBIC) on 4H-SiC bipolar diode.. Dominique Planson, Besar Asllani, Hassan Hamad, Marie-Laure Locatelli, Lumei Wei,
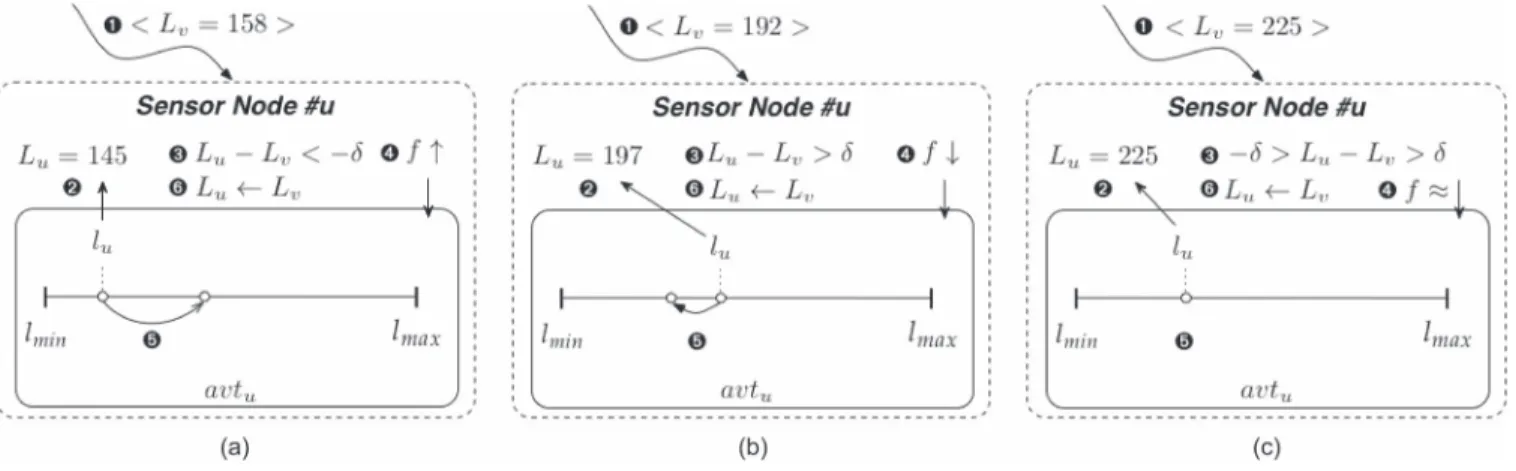
The goal of clock synchronization is to synchronize the time of all sensors because physical clocks of each sensor drift even if they have the same frequency, and these
A new species of the scelionine genus Macroteleia Westwood (Platygastridae s.l., Scelioninae) is described and figured from a female beautifully preserved in Middle Miocene amber
University of Science and Technology of China, Anhui; (b) School of Physics, Shandong University, Shandong; (c) School of Physics and Astronomy, Key Laboratory for Particle
The present study is a 2D assessment of the main real-gas methods: the cumulative-k method (CK), the statistical narrow-band model (SNB), the hybrid SNB-CK method, the grey-band
