Œ§mercrier[±s
gvîous tem!ns tou± d'a6ort à rernmcier oieu b tow± pwjssam et
iriséricord:jewG quj nous a domé ai fbrce et h pa,tience d'accompftr
ceModestetmaffdefimd'étude.
j4 notn encadffeur de mémoùe «®r. Ûl:flÆèngfiabi» à hfts priésem et
ûspori6b,i[aencowffagénotreiritiatj;vesa;utffa;versdèhgra;mde
a6erté sactiom qu'i[ now a auiorisé.
fl nos fiamriobs pour hws fiôb primipah, aurs encouffagemem
et bws sou;ti2n de nous a;woir gujÆés à amri:mer à ce que now
sommes maj;n±enam±.
fl tow bs ensebnamts qu'ib nous æcompagnés dum± nos
études swpériewes à [umj;merst±é de Jije[.
fl:ux:rnm6res du juq powr rintiiêt qu'iti mt portés à wtre
rechenhe en aÆcepta;m d'ex£a;rimer notre trwai[ q±± de [enrichj;r pœr
bwffs popositions.
J4 tou±es bs persomes qri orï± pa;nüpés de près ou @e tin à
h réatisa¢ion de ce tmmœi[
Nous a;mo!ris r hormew de &dier ce tmva;i[ à tous ce:uxi
<< ... 9Æeftti à tous ... >>Sor-e
Sommaire
Introduction Générale ... i
Chapitre I : Généralités
1.1. Introduction ...3I. 2.Types de conlact des solides ... 3
1. Contactparffit ... 3
2. Contact imparfait ... 3
1.3 Les modes de contact ... A 1. Mode ponctuel ... 4
2. Mode linéique ... 4
1.4. Frottement ... 5
1.5. Usure ...6
1. Usure par adhésion ... 6
2. Usure par abrasion ... 7
3. Usure par fatigue ... 8
Sorrmire
8
1.7 Déf ;orma:tion ...9
1. Types de défomation ... 9
2. Modes de défomation ... 9
a. Élastique (défomation instantanée et réversible) ... 9
b. Plastique (défomation non instantanée et irréversible) ... 10
1.8 Crüères de plasticité ... 10
1. Critère de Von mises ... 10
2. critère de Tresca ... „ ... 10
1.9 Le flux de chaleur ...1:3 1.10Lefluxgénèreparfirottement...11
1.11 Coeff icient de partage de f lux de chaleur ...11
I .11 Conclusion ... 11
Chapitre 11 .. Modélisœlion thermique et mécanique du contact Pion-Disque
11.1 Introduction ...1:2,2. Etude bibliographique sur le couplage themomécanique des contacts
glissants...1511.2 Introduction au COMSOL M ultiphysics ...+]
J. Interface utilisateur de COMSOL 3.5a ... 17Sommaire
3. La combinaison de COMSOL Multiphysics et MATLAB . . . 20
11.3 Les éléments f inis ... 20
11.1 Utilisatlon COMSOL ...2;O 11. 5 Présentation de la problémutique ...2,1 11.6 Hypothèses proposés ...2,1 11.7 Caractéristiques géométriques et maillage ...2;2, 1. Caractéristiquesgéométriques ... 22
2. Maillage ... 22
11.8 Matériaux ...Z3 1. Disque en Acier ... 2. Pion en cuivre ...
11.9 cœractéristiques thermiques et méi
... 23... 23
11.10 Implantations numériques des thermoco uples ...2A 1. Sphère-plan ... 25
2. Plan-plan ... 25
II.11 Equations physiques et conditions aux limiles ...2,S
1 . Fomulation du problème themique ... 252. En régime transitoire ... 26
3. En régime stationnaire ... 27
11.12 Formulation du problème mécanique ...2;]
1. Phénomènes mécanique dans le disque ... 27
2. Tenseur des contraintes ... 27
Sorïmire
4. Les conditions aux limites . . . .285CritèredevonMises...30
Chapitre 111 : Résultats et discussions
111.1 Introduction ... 33111.2 Régime stationnaire ...33
1. Comparaison entre modèle numérique et analytique ... 33
2. Contactdynamique ... 34
2.1 Evolution de la température avec les contours des contraintes de Von
Mises...342.2 Evolution des contours des contraintes de Von Mises: une
comparaison...35a. Sphère-plan ... 35
b. Plan-plan ... 35
2.3 Zones affectées par la température ... 36
a. Sphère-plan ...,... 36
b. Plan-plan ... 37
2.4 Evolution de la températue de surface et de la contrainte équivalente
de Von Mises pour les deux modèles sphère-plan et
plan-plan...38I
I
I
I
1
1
I
I
I
I
1
1
I
I
I
I
I
I
I
I
I
Sorr-ire
b. Evolution de la contrainte de Von Mises. . . .39
2.5 Evolution de la température selon la profondeur ... 40
2.6 Evolution de la température selon la charge ... 42
111.3 Régime transitoire ... A4
1 . Comparaison des températures des deux modèles de contact ... 44
2.Détemination des champs des contraintes de Von mises à travers le pion et
le disque en fonction du temps ... 46
111.4. Conclusion ... 4S
Liste des figmes
Liste des Pïgures
Figure. 1.1 : Lignes de flu et les champs de température à ]'interface d'un contact
parrait...3
Figiiml2 : Lignes de flu et les champs de tempémture à ]'interface d'un contact
impalïai'...4Figure.I.3:un contact ponctuel ... 4
Figure. I.4 Un contact linéique ... 4
Figure.I.5: Un contact surfacique ... 5
Figtme 1.6: Frottements secs. vue microscopique de ]a zone de contact ... 5
Fîgure l.7: Frottements visqueux, vue microscopique ... 6
Figiire l.8: Modèle de microcontact pour l'usure par adhésion ... 9
Figiire l.9: l'usure abmsive ... 10
Figure 11.1 : Contact glissant entre le demi-espace et la sphère ... 12
Figure 11.2: Variation de la température de surface en fonction de la vitesse ... 13
Figure 113: les conteurs de Von Mises pour les vitesses V=5, V=20et V=50m/s ... 14
Figi]re 11.4 : le modèle per éléments finis du contact sphère-plan ... 14
Figure 11.5 : Contrainte p]astique à un temps sans dimension correspondant à la pénétration maximale de la sphère ... 15
Figure 11.6 : Localisation de la température maximale au niveau de la surface de contact...15
Liste des figures
Figure ll.7:Evo]ution de La tempémture se]on ]a profondeur d'un contact Cuivre-Acier
pour une vitesse v=3m/s et p=10N. . . ....16
Figure ll.8:Evolution de contrainte de Von Mises selon la profondeur d'un contact CuivmAcier pour une vitesse v=3m/s et p=10N ... 17
Figure ll.9: Logicie] COMSOI^ ... „ ... 17
Figure 11.10: Ies différents éléments de l'interface utilisateur de COMSOL 3.5a ... 19
Figure ll.11: Logiciel MATLAB ... 19
Figiire ll.12:Le choix de modèle ... 20
Figure ll.13: Schema de principe d'un contact pion-disque ... 21
Figure ll.14: Maillage du pion-Disque 2D ... 23
Figure 11.15 : Positionnement des thermocouples pour ]e pion, le disque et au niveau de contact pour deux modèles sphère-plan et plan-plan ... 25
Figure ll.16. Contraintes autour du point A ... 28
Figure ll.17.Contraintes à la surface ... 28
Figure. 111.1 : Evolution de la température avec les contours de contrainte de Von Mises d'un contact sphère-plan pour une vitesse V=0.3 et P=10N ... 34
Figure 111.2 : Les contouiB de Von Mises dans le contact sphère- plan : Væ3m/s, p-10N...'...35
Figure 111.3 : Les contours de Von Mises pour ]e contact p]an- pLan : Vj).3m/s, p-10N...36
Figure.III.4 :Cartographie de la température dans le contact sphèreLp]an : Vfl.3 m/s et p-10N...''''''37
Figure 111.5 : Contours de la température dans le contact plan-plan à V=0.3 m/s et p=10N...38
Figurelll.6 : Évolution de la température du surface d'un contact cuivre-acier pour les deu modèles à v=1 m/s et p=10N ... 39
Figuplll.7 : Évolution de la contrainte de Von Mises d'un contact cuivre-acier pour ]es deux modèles à v=l m/s et p=10N ... 40
Figure 111.8 : Evo]ution de la température selon [a profondeur d'un contact pion-disque pour : (a)sphère-plan, (b) plan-plan a V=l et P=10N ... 41
Figure 111.9: Evolution de la température de surface pour V=7m/s et P=3N. P=13N: (a)Sphère-plan, (b) Plan-plan ... 43
Liste des figures
Figurelll.10 : EvoLution de la tempémture en fonction de temps à V=3m/s et P=10N
pour les deux modèles : sphère-plan et plan-plan. . . ... . . .45
Figurelll.1l:Evolution de ]a température en fonction de temps à V=7m/s et P=13N pour deui model sphère-plan et plan-plan ... 46 Fig.III.12 : Contours des contraintes de Von Mises dans le contact sphère-plan en
fonction de temps ... 47
Fig.III.13. Contours des contmintes de Von Mises dans ]e contact p]an-plan pour
t=5s...47
Liste des Tableaux
1
1ListedesTableaux
Tableau.II.l. Dimensions de la géométrie utilisée ... 25
Tableau. H2. Données thermiques et mécanique des matériaux utilisées ... 27
Tableau. II.3. Positions des the]mocouples du pion et du disque ... 27
Tableau 11.4. Variation du coefficient de fi.ottement en fonction de la vitesse
Œb=10N) [22] ... 34
Tableau 11.5. Variation du coefflcient de frottement en fonction de ]a charge (V=7m/s)
[23)...34
Tableau 111.1. Comparaison entre numérique (COMSOL) et amlytique ... 36
Tableau 111.2. Les températures maxima]es et ]e temps de stabiHté pour deux t)pcs de
contact sphèi.e-plan et phn-plan pour v=3m/s et p=10N ... 47
Tableau m3. Les tempémtures maximales et le temps de stabilité pour deux types de contact sphèic-plæn et p]an-plan pour v=7m/s et p=13N ... 48
1
Nomenclature
111
I
i Nomenc lature
I
11I1I1II1I1111II
Symboles
Désignations
Unités
#ii- Œ.J(~:;;;Ïi;ï , a'+,`:à_-ï,:ù,`ü,
Coefficient de dilatation themique
-; ' -;¢='ï ,
ŒM=fficient de partage
;? -Y^
Conductivité therique
?_ w.m-1.K-1P
Masse volumique
Kg.m-3 Hq'Coefficient de ffottement
-0
Contrainte normale
(`,,,Ï. Ï.m t )``<Cbntrainte tangentielle
Ïj',: "paÆOvM
14 contrainte équivalente
€ï;-`iʱ'?œÆpa C
Défor"tion
Ü .4,/`/Cbefficient de poisson
'¢Æ:``-¢g !.`Hux généré
W
¢,J,Hux de chaleur
W
qt î,;!)Hux totale
!+W
a
Rayon de contact
m
A
Surface t:',`1^ m2Cp
Chaleur spécifique :`'¥
j.Kg-1.K-lE* 1/'',
Module d'Young équivalent
N.m-2E ,iç`
Module d'Young
.t,,iJ:,;^::` N.m-2FN,1,_..dt
Fom normale
gïj.}N-ï
Nomenclature
', , .`,`r,,,::'.`:,,L,:',,'2{Z¥ffi`',_Z,&#ffiËË:}ï,".,rï/t:,`,Ï,,lx.J,._,(1Pression moyeme
' ''# #Ïv?î±'.`\ïlcïÀt¥*¥B. '`' ' Pm (,` J `` : _ j-É=` - _-.-ï---:,,R
Rayon de 1'indenteur
:#,,-JrT.,',îïï:;;Fm'`Œ.`r
Rayon
`t
Temps
T
Température
i K TccTempérature de contact
TppTempérature de pion ,;t,:r
K FTIbrce total
N
Ts
Tl'<Températuredesolide'u,Ï KTa
Température d'air
KV
Vitesse de 8lissement
+ m.s-1 vÏPChaige appliquée sur les corps
•kri t
Temps de stabilité
SP
Pion
-d
Disque
-th
Therrique
-el
élastique
-air
L'aire (surfacique)
-1
I
1
1
I
1
1
1
1
1
\ Introduetion Générale
1
I
1
1
I
1
1
I
I
I
Introduction générale
!
Introduction Générale
La tribologie est la science qui étudie les phénomènes susceptibles de se produire entre deux systèmes matériels en contact, immobiles ou animés de mouvements relatifs. Ce teme recouvre, entre autres, tous les domaines du frottement, de l'usure, de l'étude des interfaces et de la lubrification [ 1 -2] .
Les phénomènes de contact et de fiottement sont pris en compte de plus en plus souvent dans les problèmes industriels tels que les analyses du contact roue sur sol en aéronautiques, du contact roue su rail en lngénierie ferroviaire, daps la modélisation des prothèses médicales, des assemblages mécaniques, des procédés de mi\se en fome, etc. Ceci nécessite d'avoir à disposition des outils de résolution et d'analyse efficaces, robustes, fiables
et précis [3].
Le fi.ottement devient une source de génération de chaleur qui provoque une élévation locale de la température au niveau de l'interface des deux matériaux. L'augmentation qui en résulte est capable d'affecter les propriétés des matériaux en regard
caractéristiques des éléments inter faciaux et de modifier, dans certaines
structure superficielle.
La themomécanique est une partie de la tribologie. C'est une Science
qui traite des relations entre les phénomènes themiques et mécanique. Elle s'intéresse aux relations entre les composés et la quantité de chaleur que ces réactions mettent en jeu et les défomations résultantes.
L'objectif de notre travail est la détemination numérique de la distribution de la température et de champ des contraintes équivalentes lors du couplage thermomécanique d'un contact dynamique pion-disque pour deux types de contact : ponctuel et sufacique. Pour ce faire, notre travail est rédigé de la marière suivante:
Le premier chapitre présente une recherche bibliographique sur la tribologie. On a définit des généralités su le frottement et les effets de ce demier sur les matériaux, usure, contrainte et déformation. On a cité les différents types et modes de contact, le flux de chaleur généré à l'interface d'un contact dynamique.
Introduction générale
1
Le deuxième chapitre comporte la détemination des différents paramètres thermique et mécanique en utilisant des données expérimentales, les étapes à suivre pour la résolution de notre problème su le code de calcul COMSOL et la présentation des équations physiques utilisées pour la résolution.
Le troisième chapitre consiste à une présentation des résultats obtenus, en régime stationnaire et transitoire, lors de la simulation avec le code de calcul COMSOL en couplage avec MATLAB pour les deux types de géométries, avec des analyses, comparaisons et discussions concemant la variation des températures et des contraintes de Von Mises d'un contact dynamique cuivre-Acier suivie d'une conclusion générale. \`\
Chapitre l s Génémlités
1.1 Introduction
La tribolorie est la brmche de la mécanique qui étudie le fiDttement, l'usure et la lubrification des surfaœs de contact entre de" solides. Le ffottement se produit à la surface
entre deux solides en contact. C'est me interaction qui s'oppose au mouvement relatif entre detK systèmes en contact. C'est un processus très complexe qui est lié à plusieus facteurs
(mécariques, themriques, physico-chimiques, métallugiques... ). n engendre la détérioration
des surfaces en contact. La themomécanique est la branche de la tribologie qui associe ces phénomènes décrits par la mécanique et la thermique des matériaux.
NotB présentons dans ce chapitre des définitions su les fiottements entre deux solides
et les différentes phases d'usures. Ensuite, nous exposons les diffërentes définitions
concemant les contraintes et les déformations engendrées et à la fin, quelques notions su l'aspect thermique du ffottement.
1.2 Types de contact des so]ides
1. Contact parfait
Le contact se fàit sans présence d'un troisième cops avec la participation de tous les éléments de deux surfaces, alors l'élévation de température reste en continuité sans perturbation des mécanismes d'échange à l'interface. [4]
.J
I+l)the].ltle`
'J--\,
Figure.1.1LignesdefltKetleschampsdetempératureàl'interfaced'uncontactparfrit.
2. Contact imparfait :
Lorsque deu corps sont pressés l'm contre l'autre, en raison de l'imperfection
Chapitre l i Généralités
JJJ+JJJJJ
11 I
J
1 so,ide , T'Œiapitre l 8 .tés
> Mode surfacique :
lE==
Figure. 1.5 Un contact surfacique.1.4. Frottement [5)
Le fi.ottement est me `résistance' fi.einant tout mouvement relatif entre detK solides
qui sont en contact. L'effori qui tend à ralentir ce mouvement est appelé `effort de
fi.ottement', il est de sens opposé au déplacement. 11 se manifeste par me dissipation d'énergie thermique entre les deux corps en contact glissant.
• Le fiottement sec, mis en évidence par Coulomb appamît lorsque deu surfaces
physiquement distinctes sont en contact et sont enclines à glisser l'une contre l'autre. Ce fi.ottement est dû à l'encastrement des petites irrégularités positives d'une des surfaces dans les inégularités négatives de l'autre surface
Figure.I.6 Frottements secs, vue microscopique de la zone de contact.
• Le ffottement visqueux apparaît lorsqu'un fluide sépare les surfaces en contact. Le ffottement visque" est généralement moins important que le fiottement sec. 11 est dû à la viscosité du fluide.
chapitpell , . ,
' - , ~ t - ` . -- `` ~.
Figu re.I.7 ffottement visqueux
1.5 Usure [6]
Le fiottement de deux surfaces entraîne un échauffement des corps, me détérioration des états de surface et m enlèvement de matière d'm ou deu de ces surfaces. Cela dome la
naissance d'un phénomène tribologique appelé : l'usue. Elle est un ensemble complexe de
phénomènes, amenant une émission de débris avec perte de rnasse, de côtes, de fome, et ammpagnépaDdesœansformationsphysiquesetchimiquesdessurfaces.
11 existe quatre types d'usue:
1. Usure par adhésion
La manifestation première de l'usue adhésive est le transfert du matériau d'une des detK surfaces en contact, su la surface du cops antagoniste. Parmi les cas typiques, les plus comusdescouplesoùonpeutavoirdel'usueadhésivesont:lespaliers,lepiston-cylindre,
les segments - cylindre, etc.
Le principe de base de l'usue par adhésion est la fomation des micros soudues entre les aspérités en contact et le transfert de matière au moment de leu séparation dû aux
mouvements relatifs des pièces en contact ou à des agents extérieus. Ce transfert de matière peut être observé même en pratique et en général ce sont les particules du matériau le plus
tendre qui sont tmsfërées. Ce processus se manifeste à des intensités diffërentes. Le
cisaillement des nricrocontacts, suivi par le transfert du matériau le plus tendre et associé à m
Cmapitre l s Généraütés
températues très élevées dans tout le volume et le transfert intense de matière du matériau le plu tendre vers celui le plus du et inversement.
'T->ale, ,a,J :-j'_J,
rT:a.,eriail ..er]dre
Figure.I.8 Modèle de microcontact pou l'usure par adhésion
2. Usure par abrasion
On définit par usure par abrasion l'action de l'enlèvement de la matière par ffottement. 11 existe deux types d'usue abrasive : à deux corps et à trois corps. Dans le cas de l'usue abrasive à deux corps, il s'agit des interactions entre les aspérités des sufaces antagonistes qui provoquent le départ des matériaux à l'interface.
L'usure par adhésion et l'usue par abrasion ont beaucoup d'éléments en commun, pami lesquels, le fait qu'elles sont toutes les deux dépendantes du contact entre les deux surfaces. Le processus d'usue est progressif et a lieu le temps que les deux surfaces sont en contact et en mouvement relatif.
Si, entre les deux surfaces, un film de fluide se forme, le processus d'usue par adhésion ou par abrasion, prend fin.
ChapitEe l i Généralités
L`-_ _L1_`l
l..`'l'c ,,l''é'`'\c „ ( -``tlc.`'',.,`'`,c ;'
`1.''1`.`'].`. ',.`l`...ul,`
Figure.I.9 L'usure abrasive
3. Usure par fatigue
L'usue par fatigue est spécifique aLK surfaces lubrifiées, en mouvement de glissement ou roulement.
Suite à des sollicitations variables, la sollicitation maKimale dépasse la résistance limite en fatigue et des fissures se produisent dans le matériau. C'est la raison pou laquelle,
ce type d.tLsue frit son apparition après me assez longue période de fonctiomement sans
usure. Avec le temps ces fissues évoluent vers la surface et me fois arrivées à la surface, très rapidement on observe des petits détachements de matière.
4. Usure par corrosion
L'usue par corrosion est l'usue entre deux surfaces, en mouvement de glissement, daLns m cmviromement agressif (corrosiD. Une des conditions pou que œ phénomène se
manifeste est que l'oxyde doit avoir une résistance mécanique fàible. Le phénomène de corrosion est complexe et se manifeste sous diffërentes fomes : chimique, électrochimique,
biœhimique et mécano chimique.
1.6 Contraintes
Une contrainte correspond à la tendance d'un matériau à se défomer sous l'effet de forces extemes su lui. Elle décrit l'effet des forces exercées su un matériau. Elle est appliquée de manière parallèle ou tangentielle à me face d'un matériau, par opposition au
contraintes nomales qui sont appliquées de manière peipendiculaire. C'est le rapport d'me
force à me surface, qui possède donc la dimension d'me pression, exprimée en pascals ou
Chapitre l s Généralités
1.7 Déformation
La défomation est m terine générique qui décrit les changements de fome,
d'orientation ou de position d'un corps (roche, portion de la croûte tenestre) soumis à des contraintes. Lorsque ce corps est une roche, la défomation conceme essentiellement la transfomation géométrique qui affecte l'aspect, la texture ou les propriétés de cette roche.
1. Types de déformation
La défomation peut être :
Continue (variation progressive de la transfomation) ou discontinue, homogène (lignes initialement parallèles le restant après la défomation) ou hétérogène (cas le plus fi.équent), finie (conceme la forme de l'objet fmal) ou incrémentale.
2. Modes de déformation :
La déformation peut se traduire de manière :
a. Élastique (déformation instantanée et réversible) [7]
En physique, l'élasticité est la propriété d'un matériau solide à retrouver sa fome d'origine après avoir été défomé. La défomation élastique est une défomation réversible. Un matériau solide se déforme lorsque des forces lui sont appliquées. Un matériau élastique retrouve sa forme et sa taille initiales quand ces forces ne s'exercent plus, jusqu'à me certaine limite de la valeu de ces forces. Les tissus biologiques sont également plus ou moins élastiques.
I+es raisons physiques du comportement élastique diffèrent d'un matériau à un autre. Pou les métaux, le treillis atomique change de taille et de forme quand des forces leur sont appliquées (ajout d'énergie au système). Quand les forces sont supprimées, le système retoume à son état original où l'énergie est la plus faible.
La notion d'élasticité n'est pas spécifique à la mécanique des milieux continus et en physique, d'une manière générale, on parle d'interaction élastique lorsqu'il y a la conservation d'une grandeu. Dms Le cas de l'interaction d'un atome avec un rayomement
Chapitre l i Généralités
électromagnétique, on parle de diffiision élastique lorsque le rayonnement conserve la même longueu d'onde (diffiision Rayleigh).
b. Plastique (déformation non instintanée et irréversible)
La défomation plastique est la déformation inéversible d'un objet. Elle se produit par un réarrangement de la position relative des atomes, ou plus généralement des éléments constitutifs du matériau.
Lorsque l'on sollicite une pièce, u objet (on le tire, on le comprime, on le tord...), celui-ci cornmence par se défomer de manière réversible (déformation élastique), c'est-à-dire que ses dimensions chmgent, mais il reprend sa forme initiale lorsque la sollicitation s'arrête. Certains matériaux, dits ffagiles, cassent dans ce mode de défomation si la sollicitation est trop forte.
Pou les matériaux dits ductiles, lorsque l'on augmente la sollicitation, on déforme de manière définitive la pièce ; lorsque l'on anête la sollicitation, la pièce reste déformée.
1.8 Critères de plasticité
Un critère pemettant de savoir, sous des sollicitations domées, si une pièce se défome plastiquement ou si elle reste dans le domaine élastique. De nombreux essais ont montré que l'on pouvait utiliser deux critères principaux : le critère de Tresca le critère de Von
Mises.
1. Critère de von mises [8]
Le critère de Von Mises a été établi en considérant que le seuil de plasticité est lie à l'énergie élastique de cisaillement, qui est une fonction du produit tensoriel contracte su deux indices du déviateur des contraintes
2. Critère de Tresca
Le critère de Tresca relie le seuil de plasticité a la contrainte de Tresca, qui est la contrainte tmgentielle maximale. En égalant la contrainte tangentielle maximale d'un état de contrainte quelconque avec celle d'une traction uni-axiale correspondamt à l'obtention de la limite élastique.
Chapitre l f Généràlités
Da[m notre cas, noŒ utiliserons le critère de Von Mises. En effet, ce demier possède l'avantage de ne pas présenter de discontinuité su sa ftontière, ce qui est très commode d'un point de vue numérique.
1.9 Le flux de chaleur [9]
La chaleu s'écoule sous l'influence d'un gradient de température par conduction des hautes vers les basses températues. La quantité de chaleur transmise par unité de temps et par unité d'aire de la surface isotherine est appelée densité de flux de chaleu.
q>= (do/dc)*(1/S)
Où S est l'aire de la surface (m2).
On appelle flux de chaleu, la quamtité de chaleu transmise su la surface S par unité de temps, elle est exprimée en Watt :
¢--dQ/d±
1.10 Le flux généré par frottement
La puissance dissipée correspond au travail de la force Ft et s'exprime par la relation suivante :
¢ - Ft.V
¢.. est le f l:ux de chalewr (W)
V : la vitesse de glissement (m/s)
Ft : force Total
I .11 Conclusion
Dans ce chapitre nous avons présenté quelques définitions liées avec l'étude thermomécanique des contacts glissants. Nous avons définis le fi.ottement et l'usue ainsi que les différents types, les contraintes et les défomations et l'aspect themique du fiiottement.
I
I
I
I
I
1
1
I
I
I
I
1
1
I
I
I
I
1
1
I
I
Cho,pitrell
Modélisation thermique et mécanique du
contact Pion-Disque
aiÉÏpjbpe11iModé]isaiimtheqmjqtzeetmécarLiqtzedtiocm:factmuL-msqize
H.l lntroduction
L'objectif de notre travail consiste à la détemination des contraintes et des déformations liées à la variation de la températue d'm contact dynarique pion-disque pou deux types de contact : ponctuel et surfacique. Le choix de ces cas revient à la fome de
contact rencontrée dans les roulements et les de fi.eins.
On propose me étude numérique en utilisant un code de calcul COMSOL
Multiphysics par éléments finis pou résoudre notre problème du contact dynamique
pion-disque.
2. Etude bib]iogmphique sur le coup]age thermomécanique des contacts
glissanœ.
Noùeétudebibliographiqueseraorientéesudestravauréalisésdansmbutsimilaire. Des auteus se sont intéressés à ce sujet. On peut citer quelques travaux, en commençant par:
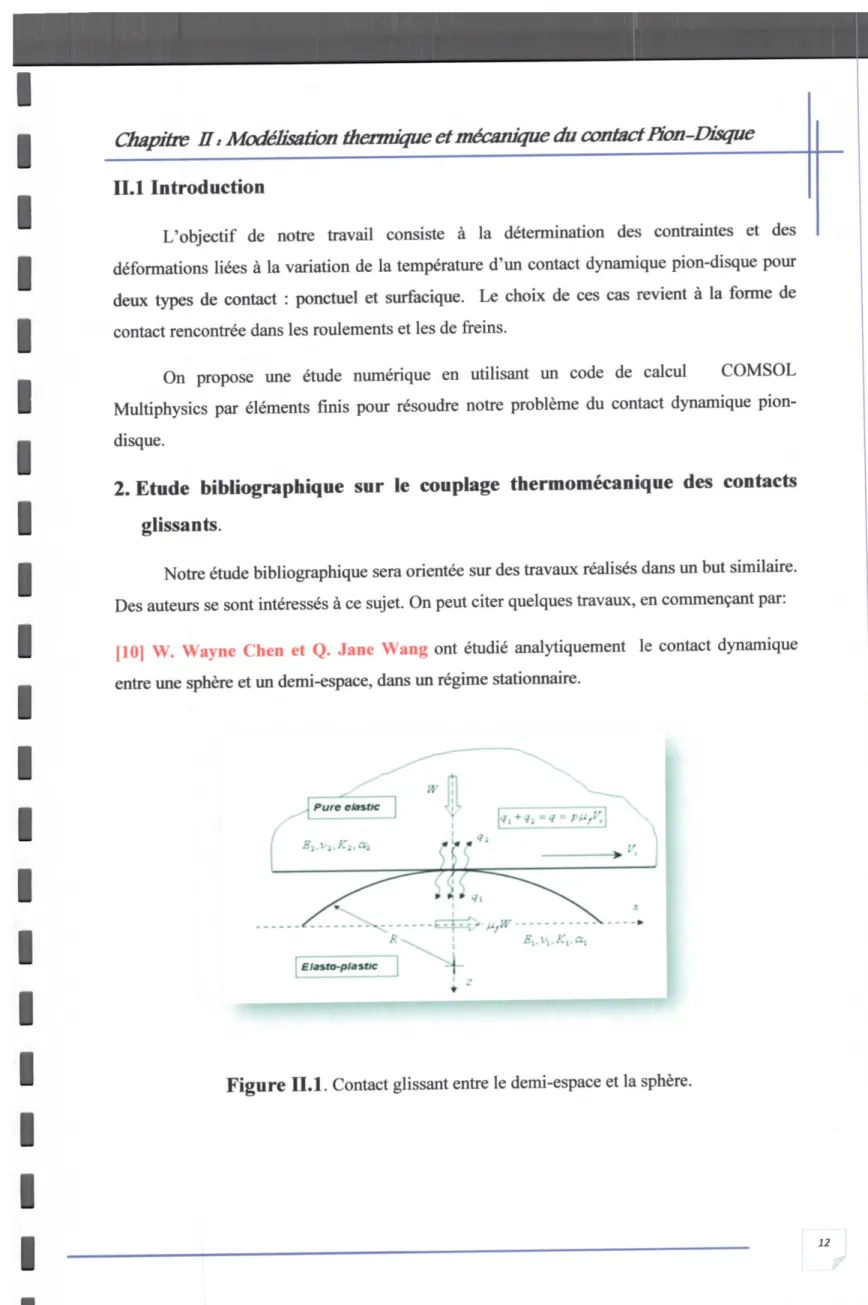
[10] W. Wayne Chen et Q. Jane Wang ont étudié analytiquement le contact dynamique entre Lme sphèoe et un demicspace, dans un régime stationnaire.
Figure 11.1. Contact glissant entre le demi-espace et la sphère.
ChÉtpifre 11 t Modélissttioi:L themiqiie ct mècaniqize dti ocmÉact Picm-msqize
Ils ont trouvé que la température augmente avec l'augmentation de la vitesse de déplacement et la température maximale atteinte à la surface de contact, pou une vitesse qui change de 5 m/s à 50 m/s, la température augmente avec un écart de 500k.
-U\.inq F.'.! §ul\c. Si.ioinq b.r«hon
«.
É:i-_ . . .
/,
Ji jo -1i .1Û 101 Oa Oi 1. 1i }0 ?i
•.`,'
Figure ll.2.Variation de la température de surface en fonction de la vitesse.
Pou les contraintes de Von Mises la figue 11.3 représente les contours des contraintes adimensiomelles Von Mises au plan y=O pour des différentes vitesses. Ils ont conclu que les contraintes diminuent avec l'augmentation de la vitesse à cause de la réduction de la surface de contact.
aizïpjÉre11sModéljsafjonthcmmjqtzeeÉmècaniqtzeduccm:factHm:msqi)e
'\`:`.-:ë-ëï,!î!.!,•.\1
05z/ao\1ç1 `` \\-Ü5z/aol151 7'11 (o) `- -. `i,Qo ` ,0, `,'C:( (c) Figure113.LescontousdeVonMisespoulesvitesses:(a)V=5,@)V=20et(c)V=50m/s.[11] A. Ovcharenko et al ont développé un modèle themomécanique par éléments finis
poumcontactglissantentreunesphèreavecmevitesseverticaleetunplmélasto-plastique en mouvement.
Figure 11.4. Le modèle par éléments finis du contact sphère-plm.
Œphte11iModéüsÉziimüDcmmjqizeetmécaiiiqtzeduoom:mctPïm:msque
bs résultats obtenus paD la méthode des éléments finis ont montré que:
1. La pénétration de la matière commencée à l'entrée de la zone de contact ou la
EfiEH
aizzpibre11iModdisÉzfimthemiquectm6caniqtzediic"t:tactHmL-msqu_
[12|A.BoufatitetS.Laibontétudiénumériquementlecomportementthermomécaniqued'un contact dynamique pion-disque.
ChÉzpïbre11sModé]isalionthemiqizeetmècaniqtzeduocmtactnon-Djsqize
-V_--V--E=v=-V--
6(n~sl3Im/s]1[rrvs'0.3(m/s] 1( l.60E +0081Jor+008-,®
--- v =0 lrrl/s 1 !111!11 i# l=OE+OO80=1.00I+008=8.00E+007£6.00E+00?g E 4,00E+00?Ë=,ooE+oo700o.ool+ooo .o.ooio .o.ooos 0.0000 X(m] o.ooos o.ooioFigureIL8.EvolutiondecontraintedeVonMisesselonlaprofondeud'mcontact
Cuivre-Acier pou une vitesse V=3m/s et P= 10N
11.2 Introduction au COMSOL Multiphysics [13]
COMSOL Multiphysics est m logiciel de simulation numérique basé su la méthode
des éléments finis. Ce logiciel pemet de simuler de nombreuses phénomènes physiques et applications en ingénierie, et tout particulièrement les phénomènes couplés ou simùation multi-physiques.
EOM50L
MULTIPHtJ5lc=5\{
Figure H.9. Logiciel COMSOL
œpiÉre 11 s Modéljsatim:L üiezmiqiie ct mécaniqtie du confact Pïon-msqtze
11 possède aussi l'interface MATLAB, pou frire une association entre les deux logiciels COMSOL"ATLAB.
L'utilisateu définit ses couplages ou sélectionne les interfaces prédéfinies. Les différentes étapes du processus de modélisation sont:
> Definer la géométrie. > Les proprieties matériaux. > Le maillage.
> résoudre et afficher les résultats.
1. Interface utilisateur de COMSOL 3.5a
L'interface de COMSOL version 3.5a constituée de quatre grandes parties. On retrouve comme la première partie c'est la barre de menu (en noir) où il est possible de définir des variables et autres paramètres du problème (Paramètres), le modèle (Model) où se retrouvent la géométrie (Géométrie), les propriétés des matériaux fomamt la géométrie, le ou les modèles de physique s'appliquant au problème étudié et les paramètres de maillage (Mesh). k Model Builder comporte aussi le type de problèmes et les paramètres de solveu (Study) et les options d'affichage et de post traitement des domées (Résultats). La colome (en bleu) à droit comporte des options relatives à ce qui est sélectionné dans la baiTe de menu, par exemple, les dimensions d'un objet qui vient d'être créé dans Géométrie. C'est aussi à cet endroit que les paramètres initiaux de la simulation et les modèles physiques nécessaires sont
choisis.
La troisième partie (en rouge) est la fenêtre d'affichage graphique (Graphics) permet de visualiser la géométrie, le maillage ou les résultats. Juste à droite de cette fenêtre se retrouve diverses options perinettant de changer le grossissement de l'affichage, l' orientation d'ui objet tridimensiomel, etc. Les options pemettant de sélectionner des objets, des domaines, des ffontières ou des points se retrouvent aussi à droit de cette fenêtre.
Finalement, directement audessous de la fenêtre d'affichage graphique, il y a une fenêtre (en vert) pemettant de visualiser les messages d'erreus, 1e progrès des simulations, la liste des opérations effectuées lors du calcul de la solution ainsi que des résultats numériques calculés une fois la simulation teminée.
CmpïfreHsModélisaiimthemjq!zeetm6camiqzedizcorftzctPïm-Djsqtze
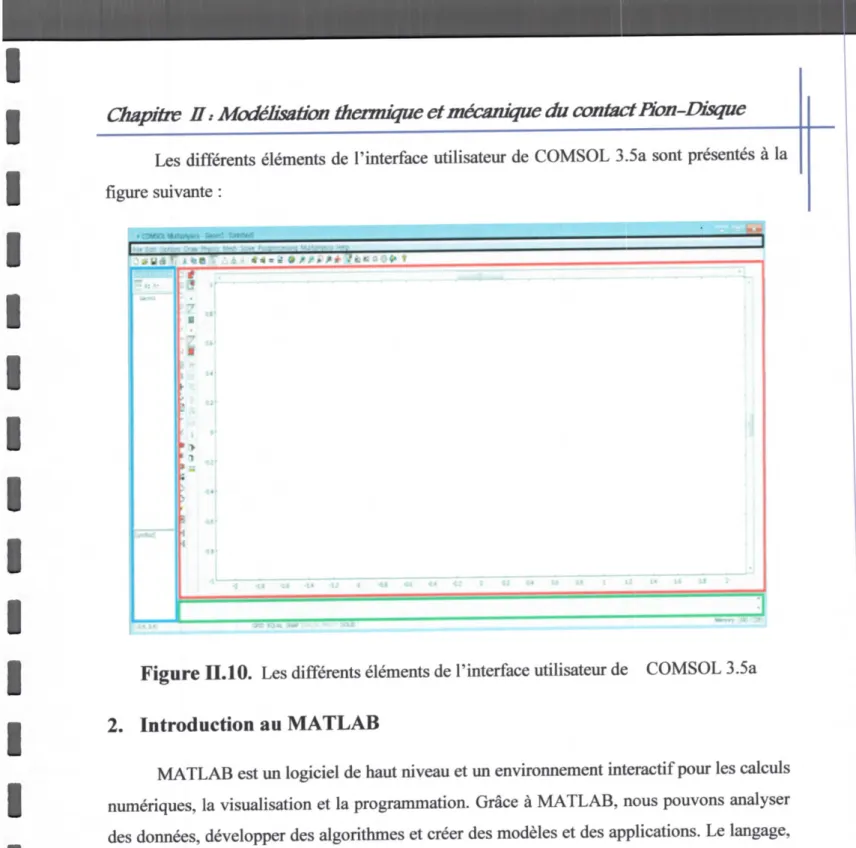
Les diffërents éléments de l'interfaœ utilisateu de COMSOL 3.5a sont présentés à la
figue suivamte :
Figure ll.10. Les diffërents éléments de l'interface utilisateu de COMSOL 3.5a
2. Introduction au MATLAB
MATLABestmlogicieldehautniveauetunenvironnementinteractifpoulescalculs
nunériques, la visualisation et la programmation. Œâce à MATLAB, nous pouvons analyser des domées, développer des algorithmes et créer des modèles et des applications. Le langage,
les outils et les fonctions mathématiques intégrées nous permettent d'explorer diverses approches et d'arriver à me solution plus rapidement qu'en utilisant des feuilles de càlcul ou
des langages de programmation traditionnels.
MATLAB
SIMULINK
Figure ll.11 :I,oriciel MATLAB
aœpÉfml1iModé]jsatim:Lthemmiqtzeetmécaniqtiedizcotttactncm-msqtze
3. La combinaison de coMSOL Multiphysics et MATLAB [13]
Nous pouvons combiner les forces de COMSOL Multiphysics et MATLAB en temps réel pou résoudre des simulations d'ingénierie, et c'est ce que nous avons adopté pour résoudre notre problème.
113 Les éléments finis
La méthode des éléments finis est la méthode numérique de référence pou le càlcul
des solutions de problèmes atK limites. Le principe de la méthode est directement issu de l'approche variatiomelle.
11.4 Utilisation COMSOL
Premièrement, nous choisissons le type de simulation comme le montre la figure suivante:
NÊw..4epeiL±.Çr¥TÉ=Êi~_tË?=i5l_ç*£rJ__Sæ^ Sp.ce Èiii.-Esiea: 2D
-M"
RF Pkxft
i - Ji; StructuraJ Medhancs "d`Je +ï . Planestrcss
+ . Planestrar`
+, , -P'ae
+ . In"aneELJerBedm
+. . Ir`fl.ne Trœs
ÏPtezoek" Eff ects
Ak:ou5tx:-Struct`.re lnt®®ctm
Tr-alflectrt-Stn.ct`rd IJ*®~
FIJd-Struct`)re lnt®actx}n Themnal-Structural lntcractm
;.-.t . Pldiw Stress wth Tt`emal Expa"5km
T,a-LJ
§tructural Me{hanics Module
Dependentvariabb: uvpTJ AppEc.t]on mode n-ne: sfrps htgh
Ele~: Leqr-W -U2 T) J] ,
20 Descrtm:
|Fredefned ;ettings fcNr planc stress wth i thermal expans.on. Corntmes pldne stress
l#:x:=*#*,dT#
usino the terrperature f". Stæmary anatysÉ.
lL
` __( _ __ __ ---,---.- y --- \
±FïïË]L-ËËÏ=ii
CmpÉÉre H s Modélisalim themiqtze ct mécanjque dLz ccmbact ncuL-msqtie
Deuxièment, nous définissons le matériau de notre problème, nous avons choisi le pion en Cuiwe et le disque en Acier
Troisièment, nous définissons les conditions aux limites imposées su les surfaces de la
strLmttlre.
Quatrièment, le choix de maillage de la géométrie et le solveu qui correspond au problème poser.
Demièrement, affichage des résultats.
11.5 Présentation de la problématique
Nous avons développé m modèle numérique qui détemine les contraintes et les
défomations liées à la variation de la température d'm contact dynamique piondisque pou
deux types de contact : ponctuel et surfacique.
Pou ce fàire, nous considérons un disque en acier et un pion en cuivre. Le disque est
d'm rayon rd et d'épaisseu d toumant autou de son axe avec une vitesse constante V. Une charge mécanique est ppliquée à la face supérieure d'Lm pion de fome cylindrique de rayon rpetdehauteuH.Ledisqueestchaufféparlachaleugénéréeparffottementavecpion.
Figure 11.13. Schéma de Principe d'm contact pion-disque
aiapifm 11 , Modélisa[tiœL üqcmiqiie et m6caniqiie dii œfttact Plm-msqtie
11.6 Hypothèses proposes
On a proposé quelques hypothèses pou résoudre notre problème:
> Le contact entre la surface du pion et celle du disque est considérer parfàit. > les matériaux du pion et du disque sont isotropes et homogènes.
> Le coefficient de convection est constant.
> La charge est appliquée en un point en surface supérieu du pion.
> La pression est répartie uniformément l'interface de contact du pion et du disque. > La température de référence T=300K
> Le rayonnement est négligé.
> Les calculs numériques sont effectués sans tenir compte de l'usue.
11.7 Caractéristiques géométriques et maillage
1. Caractéristiques géométriques
Pou la réalisation de la géométrie du pion et du disque, nous avons utilisé un disque de fome cylindrique en Acier et m pion de forme cylindrique en Cuivre avec une tête sphérique pou le contact ponctuel et me tête plate pou le contact surfacique. Les calculs ont été effectués en 2D. Les dimensions des deux géométries sont représenté dans le tableau suivant :
Contact sphère-plan
Contact Plan-plan
Rayon[m] Hauteu[m] Rayon[m] Hauteu[m]
Disque 0.1 0.01 0.1 0.01
Pion 0.0003 0.02 0.001 0.02
Tableau 11.1 Dimensions des deux géométries utilisées.
2. Maillage
Cette étape sert à définir les volumes élémentaires pou permette la discrétisation du système continu. La dimension de la maille peut être modifiée afin de diminuer le nombre d'élément et de réduire l'utilisation de la mémoire et augmenter la vitesse de calcul. Dans notre travail, le maillage contient 13963.Ce nombre d'élement a été choisi après plusieus essais menés jusqu'à ce que l'on est arrivé a ce stade où les températures ne dépendent plus du maillage.
Cha[pilre H i Modé]jsatim mcHniqtie cÉ mécaniqtze du ocm[bact mm.msqtze
c-N--_,---.-.--ï--t
' . L * ~ 1 c
-:,Û,E `,?Léi''.Î ,,,, ,+`''3S.,¥t`'---
Ï,üéæ--Figure 11.14. Maillage du Pion-Disque 2D.
11.8 Matériaux
La simulation a été ftite pou le couple tribolodque : Cuivre/Acier
1. Disque en Acier
Le disque est en acier AISI 4340.Cet acier allié au nickel-chrome-molybdène comu pou sa ténacité et sa capacité à atteindre des forces élevées dans l'état traité thermiquement. 11 a une très bonne résistance à la fatigue.
Cet alliage peut être trai¢é thermiquement à des niveauK de résistance élevés, tout en maintenmt une bonne résistance à l'usure et à la fatigue, combinée à une bonne résistance à la corrosion atmosphérique et à une résistance jusqu'à environ 600 ° F (315 ° C). [14]
2. Pion en cuivre
11 est en cuivre pu a 99.99%.11 peut être déffi comme m métal rougeâtre, malléable et ductile, qui conduit bien la chaleu et l'électricité. [14]
CliÉïpitre 11 , Modélisalim thcmiqtie ct mécaniqtie dti cx}rtfact non-msqiie
11.9 camctéristiques thermiques et mécaniques
Le tableau suivamt représente les propriétés themiques et mécaniques :
1[W/m.k) p[kg/m3] CptiÆü.k] E[Pa] V Œ [1«]
Pion
400
8700
385
110e9 0.35 17e-6disque
44.5
7850
475
205e9
0.28 12.3e-6Tableau 11.2 Domées theriniques et mécaniques des matériau utilisés
11.10 Implantations numériques des thermocouples
La réalisation des mesures numériques de température à différentes profondeus du disque, du pion et au centre de la surface de contact est effectué à l'aide des themocouples implantes numériquement. Le tableau suivant représente les positions des themocouples du pion, du disque et a l'interface.
Tpt3 Tpt2 Tpt4
Z[m] 0.00025 0.00 -0.00025
Tableau 11.3 Positions des thermocouples.
aiÉïpifm 11 t Modélisa[tio4:L fl"mLique et mècaniqize diz œfttact Plon-Djsque
1- Sphère-p]an
2- Plan-plan
Figure 11.15. Positiomement des themocouples pou le pion, le disque et au niveau de contact pou deux modèles sphère-plan et plan-plan.
11.11 Equations physiques et conditions aux limites
1. Formu[ation du prob]ème thermique
En défini l'équation de l'énergie dans les coordonnées cartésiennes comme suit:
aœpifm 11 s Modé]isatiorL flacnniqtie et mécanique du coitÉact Hon-msqtie
pcp(dE) -_ v(hvTn s + d#+ p¢ (ii.i)
D' après les hypothèses considérées préalablement
Les matériaux sont isotropes.
La dissipation visqueuse et l'effet de compressibilité sont négligeables.
L'éqution (11.1 ) devient :
PCp(#+WT)=À72T
(//. 2)2. En régime transitoire
Résoudre notre problème revient à résoudre l 'équation de chaleu dans les coordonnées cartésienne avec présence d'une source de chaleur surfacique .Elle prend la forme suivante:
Pou le disque : Pou le pion:
ÀdATd=Pdcbd(#+WTd)
kpüTp - ppCpp3. En régime stationnaire
#=o
('J. 3)(''. 4)
(''. 5)L'équation qui régit les transferts de chaleu dans le disque est :
hdHTd = Pd.CpdwTd (''. 6)
ŒPÉœ11iModélistÉatLtheamiqizectmècaniqueduoomhctHm-msqtze
Et dms le pion:
bNlp --0 (II.T)
I.es conditions aLix limites sont spécifiées comme suit :
Au contact, on a un flux de chaleu généré par ftottement entre le pion et le disque, il est noté par qt. En dehors du contact, on a la convection, elle est caractérisée par le coefficient d'échange de chaleu haiT suppose constant.
11.12 FormuLation du prob]ème mécanique
1. Phénomènes mécanique dans ]e disque
Lesphénomènesmécaniquespeuventêtreclassésentroiscatégories: > le chargement et les conditions aux limites.
> le contact eme le disque et le pion.
> l,usue.
2. Tenseur des contraintes
L'état de contrainte en m point A Œigure 11.16) est caDactérisé par le tenseu des
contraintes. C'est ui tenseu du second ordre symétrique. Dans une base orthonomée, il est
rçprésenté par la matrice des contraintes, noté oij qui s'écrit :
Oij-Criiori20-i3
a.2|o22cr23 dr3i032a33
(11.8)
Chapim H , Modéliszïtim themique et mécanjque dti coHfact Plm-msque
3. Vecteur de contrainte
Soit un point A d'un solide, et une direction repérée par un vecteu 7t- (nomale
extérieue à la matière). Soit une facette infiniment petite d'aire ds de nomale 7r. I.e vecteu
contrainte au point A suivant la direction n- s'écrit :
-T(M,næ)=Ô(M)h
(11.9)
4. Les conditions aux limites
Les conditions aux limites mécaniques correspondent soit à un déplacement, soit à une contrainte nomale ou tmgentielle imposée su différentes zones. 11 existe trois degrés de liberté en déplacement, il y a donc trois équations à résoudre simultanément pou déteminer les conditions aux limites. Les trois contraintes imposées su la surface supérieue de massif (nomale suivamt x) sont arxx , oxy et oxz, oxx est appelée contrainte normale ou pression et oxy et oxz contrainte tangentielles.
Figure ll.17.Contraintes à la surface [15].
Pou les expressions des tenseurs des contraintes en tout point du plan, nous utilisons la fomulation domée par Mc Ewen [16]. Pou obtenir les équations des contraintes nomales en chaque point du matériau on utilise :
• coordonnés cartésiennes :
a„=#[m-2z+2H(x-Mm#+Hn#]
ayy=Ë[m-z+H(r-n)](ii.i3)
(11.10)
Chzïpift l1 s Modéliséttim:L diemique et mècanjqtzc dti oorrnct Plan-Disquc
ozz=#[m -m# + pn:22-+:] (11.| |)
Trz= # [2u(m -2Z) + »::=:: + Hm==:::] (//.12)
Où o„ o-yy,azz sont les contraintes normales dans les directions nomales x, y, z et 7;rz la contrainte tangentielle.
Avec :
Avec a est le rayon de contact donné par :
a-cÏ:fl3
(11.15)Avec E* est le module d'Young équivalent définit par l'expression :
(11.16)
(11.14)
P: charge nomale N].
R: est le rayon de l'indenteu.
5. Critère de von Mises [17|
Est u critère pemettant de savoir, sous des sollicitations domées, si une pièce se défome plastiquement ou si elle reste dans le domaine élastique. La limite élastique entre le domaine élastique et le domaine plastique n'est pas clairement apparent, aussi doit-nous fixons m seuil pou la limite élastique : nous choisissons souvent la contrainte qui entraîne un
certain pourcentage de défomation, dans le cas des métaux nous tenons souvent 0,2 % La
formulation de la contrainte équivalente est exprimée par :
Chapifm H i Mdélisa;fim di£rmique et mécanique dii confact PÉon-msque
oW =±[(arx-ori)2+(a.Ï-azz)2+(Oïy-azz)2]ï/2 (||.|7)
6. Elasticité isotrope [18]
Une grande part des matériaux « industriels » sont des polycristaux, c.à.d. des arrangements plus ou moins aléatoires de cristaux. La réponse élastique des polycristaux sera une réponse moyenne de celles des cristaux, indépendantes de la direction de sollicitation.
Dans le cas d'ui état de contrainte quelconque, les défomations élastiques sont liées aux contraintes par la loi de Hooke complète.
s£[ = £ [oÏ -V(oy + az]
•;' - : [oy - „(ar + oz]
•g' - f [oz - „(a+ o,]
£Î,=ZÏoxy
£;Zz=2Ï2oyz
£Î! -2Ïoxz
(11.18)
7. Déformation thermique et thermo-élasticité isotrope
Des déformations peuvent êtres causées également par un changement de température. Dans le cas isotrope et en l'absence de contrainte, on a :
€txh = etyh--£tzh =cL AT (11.19)
Où : Œ représente le cœfficient de dilatation thermique linéaire et AT correspond au changement de température.
Lorsque sont imposés à la fois une contrainte et un changement de température, la
défomation totale :
t£th) + t€el) - t€C.t)
€th,€ci sont resFtivement les défomations thermiques et élastiques [19].
gx=Œ AT + È [ox - v(oy + oz]
(11.20)
Cliapiœ l1 s Modélisa[tim:L themiquc ct mécaniqize dii cofttact non-Disque
€y"AT +È[oy-v(ox+oz] (ii.2i)
€z" AT + : [oz - v(ox + oy]
11.13 Données expérimentales uti]isées
Les résultats expérimentaux des detK couples tribologiques utilisés dans le modèle numérique sont illustrés dans les tableaux suivants :
ètrescouple
Vitesse [m/s] Coeffic ient de Charge appliquée PV]
tribologique fi.ottement Cuivre/Acier 0.3 0.54 10 1 0.6 10 3 0.55 10 6 0.4 10
Tableau 11.4. Variation du coefficient de frottement en fonction de la vitesse (Fn=10N) [20]
ParamètresleTribologiq
Charge appliquée DV] Coefficient de fi.ottement Vitesse [m/s]
Cuivre/Acier
3 0.54 7
13 0.59 7
Tableau 11.5 Variation du coefficient de frottement en fonction de la charge (V=7m/s) [20]
CliÉtpifm l1 i Modélisstim theimiquc ct mècaniqtzc du contact Pion-msqize
11.14 Conc]usion
Dans ce chapitre, nous avons commencé par une présentation de quelques travaux sur le couplage thermomécanique. Par la suite, on présenté le logiciel COMSOL Multiphysiques qu'on utilisé dams cette étude, la géométrie de notre problématique et les caractéristiques du couple tribologique Cuivre-Acier, les conditions aux limites du couplage themomécanique. A la fin, on a présenté les équations physique qui traite le problème de notre étude, les résultats expérimenta" utilisés dams le model développer telle que la vitesse de glissement, le coefficient de fi.ottement et la charge.
1
I
I
I
I
1
1
1
I
I
I
I
I
1
1
I
I
I
1
1
I
Chapitre iiis Résultats et discussions
111.1 lntroductionCechapitreconsiste à une représentation et interprétation des résultats obtenus
numériquement par le logiciel de calcul COMSOL MULTIPHYSICS en couplage avec MATLAB pou les deux types de contact : ponctuel et surfacique. Ce modèle numérique pemet la détermination des contraintes de Von Mises et le champ de température dues à la chaleur générée par fiottement d'un contact glissant entre un pion en Cuivre et disque en Acier.
Nous avons calculé le flux de chaleu généré par ffottement à l'interface et nous avons étudié la variation de la température en fonction du temps. Cela nous a perris de déteminer le temps d'établissement pou notre couple Cuivre-Acier selon les conditions fixées. Les contraintes résultantes du couplage des deux phénomènes : themique et mécarique ont été étudiées et analyser dans cette partie pou différentes valeus de vitesses, charge et daLns les deux régimes stationnaire et transitoire. Une comparaison a été faite entre les résultats obtenus des deux géométries.
111.2 Régime stationnaire
1. Comparaison entre modè]e numérique et ana]ytique
La comparaison a été effectuée entre un modèle numérique réalisé par COMSOL et une étude analytique de la référence [10] en gardant les mêmes conditions et la même géométrie. Nous avons calculé la température de surface maximale en régime statiomaire pou une vitesse V=5m/s et une charge P=65N, le résultat obtenu est représenté dans le tableau suivant :
Méthode amalytique Méthode numérique
Erreu [%]
En statiomaire [ 1 0] En stationnaire [notre modélisation]
Températue [K] 400 397.72 0.57
Tableau 111.1 : Comparaison entre numérique (COMSOL) et analytique [10].
I
1
1
1
I
1
1
1
1
1
I
I
I
1
1
I
1
1
1
I
1
Chapitre ms Résultats et discussims
I,a comparaison des deux méthodes montre qu'il y a un écart d'environ 2.28°C. Cette diffërence est due probablement à la méflode utilisée pou la résolution : numérique et anàlytique.
2. Contact dynamique
2.1 Evo]ution de la température avec les contours des contraintes de Von
Mises.
Pou bien suivre l'évolution de la température avec les contraintes, on à essayé de
présenter les cartographies thermique avec les contous de contrainte de Von Mises pou m contact sphère-plan en phase stationnaire avec une vitesse Vj).3m/s et une charge
P=10N, comme le montre la figure (111.1). L'observation de cette figure dome que
l'évolution des contraintes de Von Mises est liée directement au variations de la
température. Elles sont maximales à la sortie de la surface de contact.
Figure. IH.l. Evolution de la température avec les contours de contrainte de Von Mises d'm contact sphèie-plan pou une vitesse V@.3 et P=10N.
Chapitre m. Résultats et.
2.2Evolution des contours des contraintes de Von Mises: une
comparaison
a-Sphère-plan
La figure. 111.2 représente les contours des contraintes de Von Mises d'un contact sphère-plan. Pou une vitesse V=0.3m/s et une charge P=10N, on observe qu'au niveau de
contact, les contours se concement à la interface. A la sortie de la souice de chaleu, la
répartition des contraintes équivalentes de Von Mises suivent les zones affectées par le passage de la source de chaleu. La valeur maximale de contrainte de Von Mises est
afteinte au niveau de contact ou l'effet de charge apparaitre.
Figure 111.2. Les contours de Von Mises dans le contact sphère-plam : Vj).3m/s,
P-10N
b-Plan-p]an
Chapitre mi Résultats et.
La figue 111.3 donne les contours des contraintes de Von Mises d'un contact plam-plan. On remarque que les contours se distribuent su toute la surface de contact et se
concentrent précisément aux bords du pion .Elles arrivent à une valeu maximale à la
sortie de la source.
Figure 111.3. Les contours de Von Mises pou le contact plan-plan :V=0.3m/s, P=10N
La comparaison des figures 111.2 et 111.3 montre que l'aire de contact a une influence significative su la distribution des contraintes de Von Mises.
2.3 Zones affectées par la température
a-Sphère-pLan
La figue 111.4 représente la cartographie themique pou un contact sphère-plan.Elle
pemet de mettre en évidence le développement et pénétration de la chaleu générée par ffottement à l'interface de contact après le passage de la souce de chaleu. On observe su
1
I
I
I
I
1
1
1
I
I
1
1
1
I
1
1
I
I
1
1
I
Chapitre mf Résultats et.
cette figue que la température est importante à l'interface de contact. Elle devient moins importante en se pénétrant dans le disque. Cela revient à la nature de la souce de chaleu
qui est superficielle.
Figure.HI.4.Cartographie de la températue dans le contact sphère-plan : V@.3 m/s et
P-10N
b-Plan-plan
Figue 111.5 représente la cartographie themique pou un contact
plan-plan.L'examen de cette figure montre que la chaleu se repartie su toute la surface de contact. Elle atteint une vàleu maximàle égale 303K. Pou la même vitesse et charge, la températue est plus importante dans le cas d'un contact sphère-plan et atteint une valeu
maximale de 335K. Cette élévation est due à la surface de contact qui est inversement
I
I
I
I
I
I
I
I
I
1
1
1
1
1
I
I
I
1
1
I
I
Chapitre m RésultaJs et discussicms
Figure 111.5. Contous de la température dans le contact plan-plan à V=0.3 m/s et p-10N
2.4Evo]ution de ]a température de surface et des contraintes
équiva]entes de Von Mises pour ]es deux modèles sphère-plan et
plan-plan
a- Température de surface
Pou la comparaison entre les deux types de contact: sphère-plan et plan-plan, nous
avons effectué des calculs qui nous ont permis de tracer des coubes identifiants la
températue à l'interface. Ces identifications sont réalisés en phase stationnaire pou les
mêmes vitesses et charge q/=l m/s et P=10N). Les coubes de la figure(III.6) montrent
l'évolution de la températue de surface en fonction de la position de la source de chaleu pou les deux cas. On observe que la température pou le modèle sphère-plan est plus importante et afteint me valeu 382K par rapport à l'autre modèle qui atteint une valeu de
306.5 K a l'interface de contact. Ces résultats confiment ce qui est trouvé précédemment.
Cmapitre
m. Résultait§ et .
-r,l,,l,,'',l,',',','',',ll',',I''l'I'Ir-_
IJ-
-danPa,_sP-dmI
Figurelll.6. Évolution de la température du surface d'un contact cuivre-acier pou les
deux modèles à V=l m/s et p=10N
b- Evo]ution de la contrainte de Von Mises
La figue 111.7 représente l'évolution des contraintes de Von Mises de contact pion-disque daiis un régime stationnaire pou deux modèles sphère-plan et plan-plan a la même
vitesse et charge. Le mouvement de la source de chaleu engendre une dissymétrie pou la
conœntration des contraintes de Von Mises à la surface entre les deux extrémités.
Pou le premier modèle on observe que dans la zone de concentration située à la
droite la valeu de contrainte est maximale peut atteint une valeu oiw =3.65esMpa et dams l'autDe zone qui située à gauche la vàleu atteint une vàleu avM = 3.8 es Mpa.
Pou le deuxième modèle, on remarque que dans la zone de concentration située à la
droite la valeu de contrainte est maximàle peut atteint une valeu oiw =3.9 e7Mpa et dans l'autre zone la vàleu des contrainte afteint une vàleu av„ = 4.6 e7Mpa.
Chapitrie mf Résultats et discussims
Ces résultat montre que les contraintes de Von Mises dans modèle sphère-plan et maximale par rapport le modèle plan-plan dans les deux zones .car l'effet de la charge est
plus importmt dans la contact ponctuel (sphère-plan) ou cefte effet est concentré a un point par contre dans contact surfacique ®lan-plan) cetee effét est distribué a la long de surface
de contact et car l'effet de la variation de la température à l'interface.
Figurelll.7. Évolution de la contrainte de Von Mises d'un contact cuivre-acier pou les
deux modèles à V=1 m/s et P=10N
2.5 Evo]ution de la température se]on ]a profondeur
Les coubes qui sont présentées dans la figure 111.8 montrent l'évolution de la
température avec la profondeu pou les deux modèles sphère-plan et plan-plan à même
vitesse et charge. L'observation des coubes de cette figuœ montre que :
I.a tempéiatue maximale est à la sortie de la surface de contact. Elle commence à
diminuer en s'éloignant de l'interface jusque elle atteint la température ambiante (300K).Pou le premier modèle, la température de disque atteintla température ambiante a
une profondeu zF=:0.0004 m. Pou le deuxième modèle, la profondeu devicmt zÜ.0006m.
Chapitre ms Résultats et.
Ce résultat revient à la surface de contact qui a un effet direct su la pénétration de la
chaleu.
(a)
Chapitiie iiis Résultats et discussforLs
Figure 111.8. Evolution de la température selon la profondeu d'un contact pion-disque pou : (a)sphère-plan, (b) plan-plan à V=1 et P=10N
2.6 Evolution de ]a température selon ]a charge
Pou bien suivre l'effet de la charge sur l'évolution de la températue des deux corps en contact pou les deux géométries, nous avons présenté les coubes de la figure 111.9 qui doment la variation de la température selon la charge pou les deux types de contact sphère-plan et plan-plam. On observe que la températue augmente avec la charge pou les deux cas, car le flux généré par frottement à l'interface de contact dépend de la charge appliquée.
Pou le contact sphère-plan :
P=3N, V=7 m/s la température maximale atteint une valeu de 360 K. P= 13N, V=7 m/s la température maximale atteint une valeu de 580K. Pou le deuxième contact plan-plan, on a trouvé
P= 3N, V=7 m/s la température maximale atteint la valeu 305K P= 13N, V=7 m/s la température maximale atteint une valeu 323K
Cmapitpe
mi Résulta[ts et .
EE
(a)
1
I
I
1
1
I
I
I
I
I
1
1
I
1
1
I
1
1
I
I
I
Chapitrie m Résultats et discussions
Figure 111.9. Evolution de la température de surface pou V=7m/s et P=3N. P=13N: (a)Sphère-plm, (b) Plan-plan
111.3 Régime transitoire
Dams cette partie, nous avons présenté les coubes en fonction de temps pou bien suivre l'évolution des températues à travers le contact pion-disque. Pou déterminer ces températues, nous avons choisie des points dans le pion, le disque et a l'interface de contact.
1. Comparaison des températures des deux modèles de contact
l.es coube de la figue 111.10 montrent l'évolution des températues en régime transitoire pou une vitesse de déplacementv=3 m/s et une charge P=10N. On observe deux zones pou la variation des températures, la première correspond à la phase transitoire et la deuxième à la phase stationnaire. La température de t)pe de contact plan-plan se stabilise plus rapide que celle du contact sphère-plan-plan. Ce résultat revient à la surface de contact.
Contact Plan-plan CoDtact sphère-p]an
V-3m/s, P-10N Tcc=308.89 K ts-1.7s Tcc=316.9 l K ts-3s
Tableau 111.2 Les températures maximales et le temps de stabilité pou deux types de contact sphère-plan et plan-plan pou V=3m/s et P=10N.
Cmapitre mf RésultaJs et discuss
lons
i ' :L .i;,,r-Î,;,;Ïr'ï*; -,
' 1 '
I
`3i,syFigurelll.10. Evolution de la température en fonction de temps à V=3m/s et P=10N
pour les deux modèles : sphère-plan et plan-plan.
Les coubes de la figure 111.11 représentent l'évolution de la température en
fonction de temps pou les deux géométries. En comparant avec les résultats de la figue m.10 on remarque que l'augmentation de la vitesse et le charge provoque une élévation
des températures (Tcc, Tpp, Tdd) et une diminution au temps de stabilité dans les deux cas.
Contact P]an-p]an Contact sphère-plan
V=7m/s, P= 13N Tcc=318.65 K ts-1s Tcc=335.32K ts-1.4s
Tableau H13 les températures maximales et le temps de stabilité pou deux types de
contact sphère-plan et plan-plan pou V=7m/s et P=13N.
Chapitre mi Résultats et discusstms
Fîgurelll.11.Evolution de la températue en fonction de temps à V=7m/s et P=13N pou deux model phèie-plan et plan-plan.
2. Détermination des champs des contraintes de Von mises à travers le
pion et ]e disque en fonction du temps
La figure 111.12 représente l'évolution des contraintes équivalentes pou deux instants t = 0.5s et 5s pou le contact sphère-plam, pou une vitesse V=7m/s et charge
P=13N. On reinarque qui'il y a une progression pou l'apparition des contraintes en
fonction du temps.
Chapitre mi Résulfats et discussims
i-"ï--#Ë----Ï
Iun
iJ_.= -_i H¥ _._ .`-^..` ..-. ij-=Ë...ï.`..-. S .... =.:==`..t.:;.-- `.-. `.t.:`:-. i-`.t-0.5s
t-5s
Fig.III.12. Contous des contraintes de Von Mises dans le contact sphère-plan en
fonction de temps.
La comparaison des contours des deux géométries pou le même instant t=5s montre que l'effet de la vitesse su le développement des contraintes apparait dans le cas plam-plam d'où on observe des contraintes en dehors de la zone de contact (Figure 111.13). Dans le cas sphère-plan les contraintes sont encore au niveau de contact ce qui explique la diffërence entDe le temps de stabilité des deux géométries.
Chapitpe iii: Résultats et .
Fig.III.13. Contous des contraintes de Von Mises dans le contact plan-plam pou t=5s111.4.Conclusion
Dans ce chapitre, nous avons présenté et interpréter les résultats trouvés d'un contact Cuivre-Acier pour deux géométries : sphère-plan et plan-plan. Nous avons effectué une comparaison entre les paramètres themique et mécanique des deux géométries.
Pou les deux modèles de contact ; sphère-plan et plan-plan ; la température maximale se situe au voisinage de la sortie du contact même chose pou les contraintes de Von Mises.Cela montre que la variation des contraintes de Von Mises est liée directement à la distribution de la température.
Les variations de la température et des contraintes de Von Mises sont liéesà la surface de contact. Elles deviennent plus importantes quand la surface de contact est réduite.
Le temps de stabilité des températures est inversement proportionnel à la surface de contact.
I
I
I
1
I
1
1
1
I
1
1
I
1
1
1
1
1
1
1
1
1
1
1
1
Conclusion Générale
Conc]usion générale
Dans ce travail, nous avons déterminé numériquement les contraintes de Von Mises et les températures d'un contact dynamique pion-disque pou deux types de contact : ponctuel et surfaci que.
Pou résoudre ce problème, on a utilisé le logiciel COMSOL en couplage avec MATLAB, en régime permanent et transitoire, afm d'estimer les paramètres themique et mécamique à l'interface d'un contact Cuivre-Acier. L'utilisation d'un code de calcul est un moyen qui nous pemet d'accéder à l'interface, de bien suivre les défomations après le passage de la sotirce mobile et de déteiminer les paramètres demandés.
Nous avons choisie des points dans le pion, le disque et au riveau du contact pour suivre la variation de la température en fonction du temps.
Les résultats obtenus par le logiciel COMSOL montre que :
Les températues et les contraintes surfaciques sont maximales à la sortie de la source et moins importamte à l'entrée pou les deux modèLes de contact : sphère-plan et plan-pLan.
La variation de température à l'interface est plus importante dans le contact sphère-plan que le contact sphère-plan-sphère-plan ce qui montre que la surface de contact est inversement proportionnelle à la variation de température.
Les contraintes de Von Mises sont plus importantes dans le contact sphère-plan, par contre dans le contact plan-plan elles sont moins importantes.
L'augmentation de la charge implique une augmentation de la température dans les deu modèles de contact, cette augmentation est très importante lorsque la surface de contact est réduite.
Le temps d'établissement varie avec la surface de contact. 11 est minimale quand l'aire de contact est important et vice-versa.
![Tableau 11.5. Variation du coefflcient de frottement en fonction de ]a charge (V=7m/s)](https://thumb-eu.123doks.com/thumbv2/123doknet/14677379.742698/12.892.15.876.31.1225/tableau-variation-coefflcient-frottement-fonction-charge-m.webp)