Commande des machines à induction
70
0
0
Texte intégral
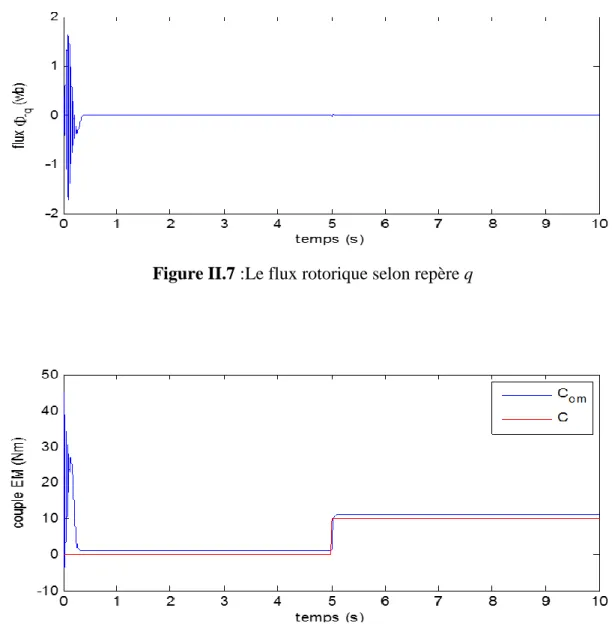
Figure
+7
Documents relatifs