Pyramid wavefront sensor Optical Gains compensation using a convolutional model
10
0
0
Texte intégral
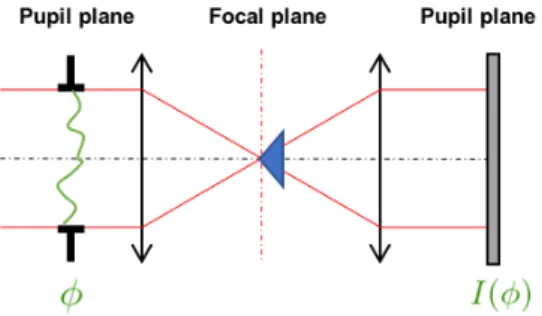
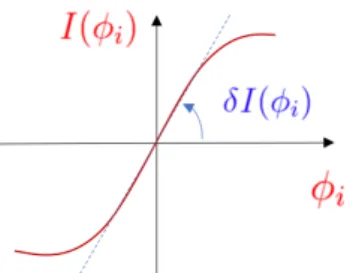
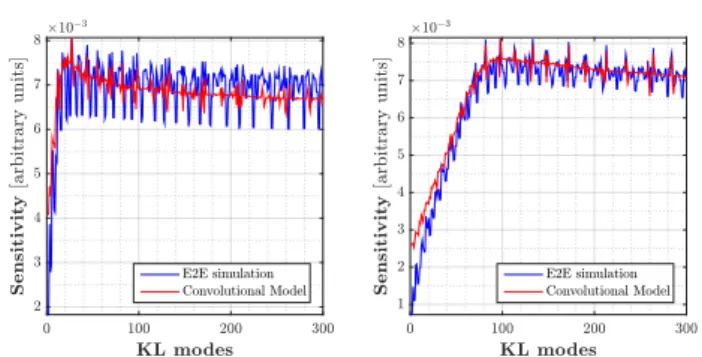
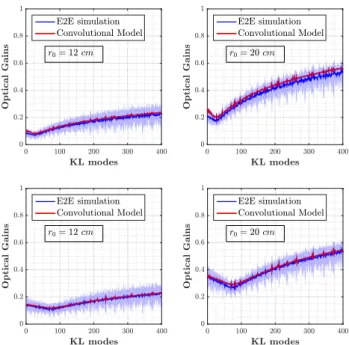
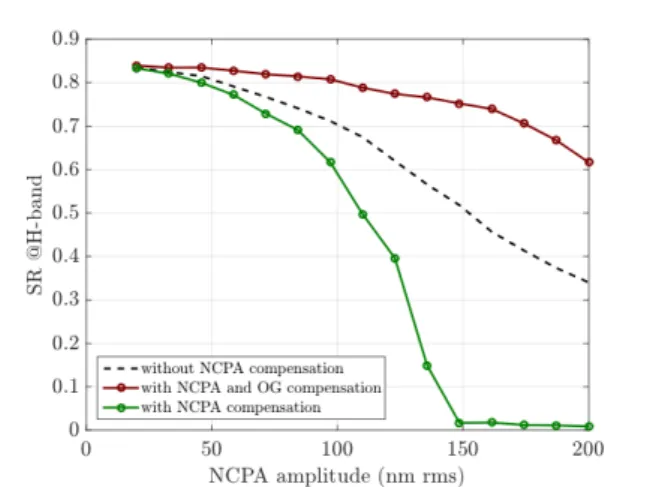
Figure
+5

Documents relatifs