Stationary Oldroyd model with diffusive stress: mathematical analysis of the model and vanishing diffusion process
39
0
0
Texte intégral
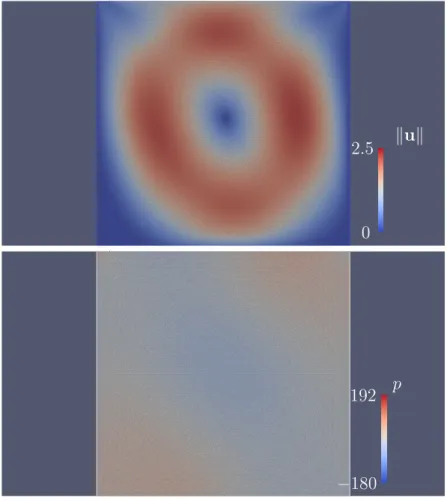
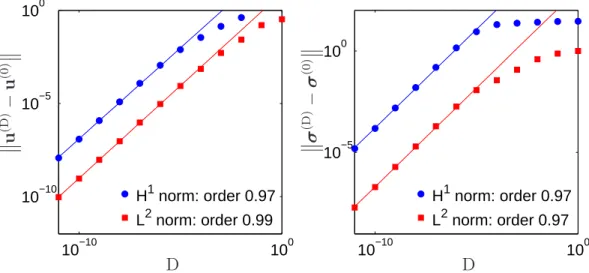
Figure



+7





Documents relatifs