Publisher’s version / Version de l'éditeur:
Vous avez des questions? Nous pouvons vous aider. Pour communiquer directement avec un auteur, consultez la
première page de la revue dans laquelle son article a été publié afin de trouver ses coordonnées. Si vous n’arrivez pas à les repérer, communiquez avec nous à [email protected].
Questions? Contact the NRC Publications Archive team at
[email protected]. If you wish to email the authors directly, please see the first page of the publication for their contact information.
https://publications-cnrc.canada.ca/fra/droits
L’accès à ce site Web et l’utilisation de son contenu sont assujettis aux conditions présentées dans le site LISEZ CES CONDITIONS ATTENTIVEMENT AVANT D’UTILISER CE SITE WEB.
Advances in Artificial Intelligence, Lecture Notes in Computer Science; Volume
6657, pp. 50-55, 2011-05-27
READ THESE TERMS AND CONDITIONS CAREFULLY BEFORE USING THIS WEBSITE.
https://nrc-publications.canada.ca/eng/copyright
NRC Publications Archive Record / Notice des Archives des publications du CNRC :
https://nrc-publications.canada.ca/eng/view/object/?id=6fd74685-5084-4263-be3e-6b38afe3a70e
https://publications-cnrc.canada.ca/fra/voir/objet/?id=6fd74685-5084-4263-be3e-6b38afe3a70e
NRC Publications Archive
Archives des publications du CNRC
This publication could be one of several versions: author’s original, accepted manuscript or the publisher’s version. / La version de cette publication peut être l’une des suivantes : la version prépublication de l’auteur, la version acceptée du manuscrit ou la version de l’éditeur.
For the publisher’s version, please access the DOI link below./ Pour consulter la version de l’éditeur, utilisez le lien DOI ci-dessous.
https://doi.org/10.1007/978-3-642-21043-3-6
Access and use of this website and the material on it are subject to the Terms and Conditions set forth at
Utility estimation in large preference graphs using A* search
Using A* Search
Henry Bediako-Asare1
, Scott Buffett2
, and Michael W. Fleming1
1
University of New Brunswick, Fredericton, NB, E3B 5A3 {o3igd, mwf}@unb.ca
2
National Research Council Canada, Fredericton, NB, E3B 9W4 [email protected]
Abstract. Existing preference prediction techniques can require that an entire preference structure be constructed for a user. These struc-tures, such as Conditional Outcome Preference Networks (COP-nets), can however grow exponentially in the number of attributes that de-scribe the outcomes. In this paper, a different approach for constructing COP-nets, using A* search, is introduced. Using this new approach, par-tial COP-nets can be constructed dynamically or on demand as opposed to the current process of generating the entire structure. Experimen-tal results show that the new method yields enormous savings in time and memory requirements, with only a modest reduction in prediction accuracy. One such large example shows only a 5% decrease in the suc-cess rate, while reducing computation time from over 3 hours to just 2 seconds.
1
Introduction
In recent years, the idea of autonomous agents representing users in some form of automated negotiation has gained a significant amount of interest [6–8]. This has inspired research in finding effective techniques for modeling user preferences and also eliciting preferences from a user [2, 3, 11].
Preference networks have been developed to graphically represent models of user preferences over a set of outcomes. One such preference network is Boutilier et al.’s Conditional Preference Network or CP-net [1]. Another example is the Conditional Outcome Preference Network, also known as a COP-net, developed by Chen et al. [5]. Using preference elicitation techniques, such as standard gamble questions or binary comparisons [9], an agent can obtain information on a user’s preferences. A preference network (such as the COP-net) can then be created based on the elicited preferences over the set of generated outcomes.
When eliciting user preferences, it may seem ideal to continuously query a user until most or all preference information is known in order to construct a sufficiently complete preference model. However, it is typically infeasible to learn all preferences over a large number of outcomes, in part because of the associated cost of annoying or bothering the user. Therefore, given the typical scenario of
knowing only a small number of preferences, the agent will have to be able to predict as many other preferences as possible over the set of generated outcomes. The COP-net helps to accomplish this by allowing the agent to estimate utilities - quantitative measures that show how desirable an outcome is to a user - of outcomes in its structure [5]. Again, some true utilities of outcomes (at least the best and the worst outcomes) will have to be elicited from the user in order to be able to estimate the utilities of the other outcomes. In constructing the COP-net using the current methodology, a set of all possible outcomes is generated from the given attribute values and all of the outcomes are used in its structure. For example, given five attributes, each having three possible values, 35
= 243 outcomes will be generated and used in the COP-net. As the number of attributes grows, the size of such a network quickly becomes unmanageable.
In many cases, preferences over a small number of outcomes are all that is needed, such as when determining whether one particular outcome is preferred over another. Here, it will be valuable to be able to build a partial COP-net, containing only outcomes that are relevant in determining the relationship be-tween the two outcomes of interest. In doing this, it is extremely important not to compromise the accuracy with which the COP-net predicts preferences over outcomes.
In this paper, such an approach for constructing COP-nets is introduced, using A* search. The technique works by searching for a small number of paths from one outcome to the other in the implicit COP-net. Using this new method-ology, smaller COP-nets can be constructed dynamically or on demand, thus eliminating the need to generate the network for an entire set of possible out-comes.
2
Preliminaries
2.1 Preference Networks
In this section, we define a structure for representing the user’s preferences that are currently known in such a way that new preferences can be directly inferred, due to the transitive nature of preferences. The structure is a directed graph that represents preferences over the set of outcomes, and is referred to as a Conditional
Outcome Preference Network (COP-network). Every outcome is represented by
a vertex, and for vertices v and v′ representing outcomes o and o′, respectively,
if v is a proper ancestor of v′ then o is preferred over o′. The graph is similar
to Boutilier’s preference graph constructed based on a CP-network [1], but a COP-network can model a wider array of preference specifications and is more conducive to estimating utility values over the set of outcomes. See Chen [4] for more details.
The graph can be used to check that the user’s given preferences are consis-tent. A COP-network is said to be consistent if and only if there is no outcome that is preferred over itself - i.e., if and only if the network is acyclic. If a COP-network corresponding to a given set of preferences is found to have a cycle, then the user must be consulted in order to correct the inconsistency.
The graph is also transitively reduced by the removal of redundant edges. For
example, for vertices vi, vj and vk, if there are two paths vi → vj → · · · → vk
and vi→ vk, the second path (i.e. the arc from vi to vk) is not necessary since
preferences that are reflected by the first path include the preference that the
second path reflects. Thus, the arc (vi, vk) is said to be redundant and can be
removed.
An example of a reduced COP-network is shown in Figure 1. Each possible
outcome oi in the decision problem is represented by the vertex vi in the graph.
It is evident from this graph that outcome o0is preferred over outcome o1since
v0 is the parent of v1. Outcome o1 is preferred over outcome o7 since v1 is a
proper ancestor of v7. Neither of outcomes o3 and o6 is known to be preferred
over the other since v3is neither an ancestor nor a descendant of v6.
v0 v1 v2 v4 v5
v3
v6
v7
Fig. 1.A reduced COP-network.
In addition to modeling the user’s preferences during the elicitation stage, the COP-network can also be used to estimate a utility function over the set of outcomes. Given an initial partial utility assignment, including at least the most preferred outcome (utility 1) and the least preferred (utility 0), and the
preferences defined in the COP-network, a utility function ˆuover the entire set
of outcomes is produced. This is done in such a way as to preserve the preference
ordering specified by the COP-network. Specifically, if v and v′ represent
out-comes o and o′ and v is a proper ancestor of v′, then ˆu(o) > ˆu(o′). Estimating a
utility for every outcome in this way then allows one to compare two outcomes that might otherwise have no direct relationship (i.e. one being an ancestor or descendant of the other) in the graph.
2.2 A* Search
A* search is a well-known best-first search algorithm that finds the least-cost path from a given initial node to a goal node [10]. During the search, the algo-rithm evaluates nodes by adding the cost, g(n), of reaching a node n from the initial node, and the estimated cost, h(n), of getting from node n to the goal node. The resulting value, f (n) = g(n) + h(n), gives the estimated cost of the cheapest solution through n, and this evaluation function is used to decide which node to expand next. If the heuristic function, h, satisfies certain conditions, then A* search turns out to be both complete and optimal [10].
If the algorithm is used on a tree structure, A* search is guaranteed to find the least-cost path if h is an admissible heuristic, one that will never overestimate
the true cost of reaching the goal node from the current node. In the case of a graph search, the heuristic h must also be consistent, which requires that for any
node n and any successor n′ of n, the estimated cost of getting to the goal from
nis no more than the actual cost of getting from n to n′plus the estimated cost
of reaching the goal from n′ [10].
3
Motivation for Partial COP-net Construction
The current method for constructing COP-nets provides a reasonably accurate model for representing a user’s preferences. An agent will, with high frequency, be able to correctly predict a user’s preference given any two outcomes, provided a sufficient amount of preference information has been elicited from the user [5]. However, with the current solution, in order to estimate the utility of a small number of outcomes, or even a single outcome, the entire structure must be constructed. Thus, in order to construct a COP-net, all possible outcomes will have to be generated. Given a problem with n attributes, each attribute with
up to m possible values, the resulting COP-net will contain O(mn) vertices.
Thus using such graphs to represent a preference profile becomes infeasible for problems with large numbers of attributes/values.
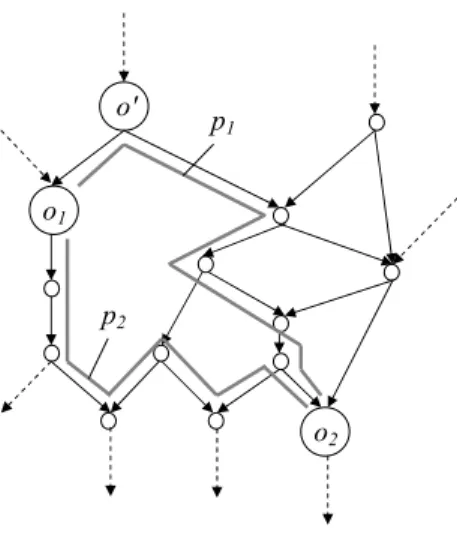
It would therefore be valuable to be able to construct only a partial COP-net when predicting preferences. When examining a preference model to determine which of two candidate outcomes is likely to be preferred, one really only needs to examine the characteristics of the region of the preference graph that lies between the two outcomes. The rest of the graph will be largely irrelevant. For example, consider the graph in Figure 2, which exhibits a partial COP-net. If we
were faced with the task of predicting which of o1 and o2 is preferred, it is likely
that a great deal of the most valuable preference information to be considered in making such a decision lies in this small region of the graph.
To understand how this information can be used, consider the following.
COP-nets have the property that, for any arc (oi, oj), (1) oi ≻ oj is known,
and (2) there is no ok such that oi ≻ ok and ok ≻ oj are known. Via simple
statistical theory, one can observe that all things being equal in terms of number
of outcomes, number of known preferences, etc., for any oi, oj, o′i and o′j with
oi ≻ oj and o′i ≻ o′j, if there is an ok such that oi ≻ ok and ok ≻ oj are known
but no o′
k such that o′i ≻ o′k and ok′ ≻ o′j are known, then E(u(oi) − u(oj)) >
E(u(o′
i)−u(o′j)). That is, the difference in the utility of two outcomes is expected
to be higher the more outcomes that are known to be between them, all things being equal.
As a result of this observation, the partial COP-net in Figure 2 contains some
valuable information regarding the likely preference over o1 and o2. Consider
for example the arcs connecting o1 and o2 along p1, which would represent a
path between the two nodes if edges were undirected. By the axiom above, E(u(o′) − u(o1)) < E(u(o′) − u(o2)), which implies that E(u(o1) − u(o2)) > 0,
meaning that the information contained in p1 provides evidence that o1 is likely
Fig. 2.A partial COP-net for deciding the likely preference over o1 and o2
ancestors/descendants for o1and o2, also provides evidence that o1is more likely
preferred.
The technique presented in this paper is then to generate partial COP-nets by attempting to construct such connections between the outcomes in question in the COP-net. Once the partial COP-net is constructed, the preference infor-mation represented in the connections in the partial COP-net is then exploited to determine the likely preference.
4
Generating Partial COP-nets
This section outlines the proposed method for generating partial COP-nets. The technique is based on the idea of searching for paths through the implicit graph that is represented by the set of known preferences. In the proposed method, the problem of finding such paths in the implicit graph is accomplished by modeling the task as a search problem, and using the A* search strategy to explore the space and establish the connections.
4.1 Partial COP-net Composition
The partial COP-net is composed by finding chains of arcs through the implicit COP-net that connect the outcomes in question. These chains would represent paths through the COP-net if direction were removed from the arcs, but do not necessarily (and are in fact very unlikely to) represent directed paths. For
example, p1and p2in Figure 2 represent two such valid chains we seek to find. We
choose to generate the partial COP-net by constructing four chains as follows.
node and o2as the goal node. Two chains are then generated from o1 to o2, one
that passes through a parent node of o1 and one that passes through a child
node of o1. A second pair of chains is then generated similarly, but with o2 as
the start node and o1as the goal node, with one chain passing through a parent
node of o2 and one passing through a child node of o2. The idea here is to find
a diverse sample of chains that reach both above and below each outcome in question. The two pairs of chains are then merged to obtain a partial COP-net from which utilities are estimated and preferences predicted.
4.2 Search Space
The set of known preferences can be seen as offering an implicit representation
of the true COP-net. For example, if the preference oi ≻ oj is specified, then
this implies that the node representing oiis an ancestor of the node representing
oj in the true COP-net. A chain through the implicit COP-net can thus be
constructed by jumping from one outcome to the next by finding preferences that dictate that one outcome is more preferred than another (and is thus an ancestor) or less preferred (and is thus a descendant). For example, if preferences
are known that dictate that o1≻ o2, o1 ≻ o3 and o3≻ o4, then a chain can be
constructed as depicted in Figure 3. The goal is then to find reasonably small chains through the COP-net space, which will in turn result in reasonably small partial COP-nets. Here, an outcome in the outcome space is similar to a state in the state space. The preferences then dictate the possible “moves” in the space. The goal is to move through the space from the initial outcome to the goal outcome, producing a chain to be used in the partial COP-net.
Fig. 3.A chain of nodes found using preferences o1≻ o2, o1≻ o3 and o3≻ o4
Since we employ the ceteris paribus assumption (i.e. “all else equal”) in this paper, preferences can be quite general and therefore a single preference may dictate a large number of relationships in the COP-net. For example if there are
two attributes A and B with values {a1, a2} and {b1, b2} respectively, then the
preference a1≻ a2under ceteris paribus implies both that a1b1is an ancestor of
a2b1 and that a1b2 is an ancestor of a2b2. We also allow conditional preferences
specified by c hold, the values specified by x are preferred over the values specified by y, all else equal. Legal moves throughout the space are then defined as follows.
Let A′⊆ A and Ac⊆ A be subsets of the attributes describing the outcomes, and
let vk(A′), vℓ(A′) and vc(Ac) be possible mappings from the subset of attributes
in question to possible values. A preference vc(Ac) : vk(A′) ≻ vℓ(A′) can then
be applied to an outcome oi to move to an outcome oj in the search iff either:
Case 1:
1. The values for A′ specified in oi are equal to vk(A′)
2. The values for A′ specified in oj are equal to vℓ(A′)
3. The values for Ac specified in both oi and oj are equal to vc(Ac)
4. The values v(A \ A′) for all other attributes are the same in oi and oj
Case 2:
1. The values for A′ specified in oi are equal to vℓ(A′)
2. The values for A′ specified in o
j are equal to vk(A′)
3. The values for Ac specified in both oi and oj are equal to vc(Ac)
4. The values v(A \ A′) for all other attributes are the same in oi and oj
Note that Ac could be empty in the case of unconditional preferences. In case
1, the arc (oi, oj) will then connect the two outcomes in the chain, while in
case 2 the arc (oj, oi) will connect the two. Also note that, since we impose the
restriction that one chain should begin with an ancestor of the start node and one with a descendant, when starting with an ancestor (descendant) the first step of the search is constrained to moves that satisfy case 2 (1) only.
To illustrate, assume the current node in the search is a1b1c1and the elicited
preferences from the user include a1 ≻ a2 and b1 : c2 ≻ c1. Applying a1 ≻ a2
will allow the search to go “down” from a1b1c1to a2b1c1, (i.e. since a2b1c1must
be a descendant of a1b1c1 in the COP-net), and applying b1: c2≻ c1 will allow
us to go “up” from a1b1c1to a1b1c2.
4.3 The Heuristic function
A consequence of the generality realized by employing ceteris paribus in the preference representation is that there may be several possible preferences that can be applied to an outcome, and thus several possible steps from which one needs to choose during the search. To increase the likelihood of identifying short chains between outcomes, we employ a heuristic to help choose which of the elicited preferences to apply and thus which outcome to select as a successor to a current outcome during the search.
The heuristic used to guide the search is defined as follows. Let oi be the
outcome representing the initial state in the search, let oj represent the goal
state and let on be a possible choice for the next state in the search for oj. The
heuristic h(on) for on is then set to be equal to the number of attributes whose
values differ in on and oj. Such a heuristic should then guide the search toward
the goal node. If g(on) represents the number of steps in the chain found from
4.4 Admissibility and Consistency of the Heuristic
Earlier in this section we defined our set of preferences generally to specify that
a set of values for a subset A′⊆ A of the attributes is preferred over another set
of values for A′, all else equal. If the restriction is posed that |A′| = 1, which is
quite often the case in most problems as people are most comfortable expressing preferences over single attributes rather than combinations of attributes, then the heuristic described above is admissible and the technique described above constitutes an A* search. This can be illustrated as follows. If each preference is specified over only one attribute, then only one attribute value can be changed in
each step in the search. Thus if h(on) equals the number of attribute values that
differ between on and the goal outcome, then h(on) cannot be an overestimate
of the number of steps from on to the goal, and h is therefore admissible.
Under the same assumption that |A′| = 1, the heuristic is also consistent.
Let on be the current outcome in the search space such that h(on) = k is the
number of attribute values on which on and the goal outcome oj differ. Let
om be any outcome that can be reached from on in one step. Again, under the
assumption that |A′| = 1, only one attribute value can be changed via that step,
and so h(om) is at least k − 1. Therefore, h(on) is no larger than h(om) plus the
actual cost of moving from on to om (which is 1), which satisfies the definition
of consistency.
5
Analyzing the Partial COP-net to Predict Preferences
Once the partial COP-net is constructed by merging the four chains into a single graph, the next step is to exploit the inherent structure to estimate a relative
utility for each node in the graph. Once utilities are estimated for all nodes, it is
a simple matter of comparing estimated utilities for the nodes in question and selecting the highest as the most preferred. Utilities of outcomes in a partial COP-net are estimated using a modified version of a method referred to as the
Longest Path technique [5], which is outlined as follows:
The method iteratively selects paths in the graph containing outcomes for
which a utility ˆuhas not yet been estimated. Formally, let p be a path in the
net-work with endpoints representing outcomes o1 and on. This path is a candidate
for selection if it is a longest path such that:
– ˆuis known for o1and on
– ˆuis unknown for all other outcomes represented by vertices on p
– The assignment of utilities to such outcomes will not cause an inconsistency
in the graph3
Once a suitable path p has been selected, the utility ˆu is assigned for each
outcome o1, o2, . . . on represented on p, decreasing from o1 to on, by
3
ˆ
u(oi) = ˆu(on) +
(n − i)(ˆu(o1) − ˆu(on))
n− 1 (1)
In order to ensure that such a path exists at the beginning of the process, it is
assumed that there is always a top-most node in the graph with ˆuequal to 1, and
a bottom-most node in the graph with ˆuequal to 0. In this particular application
of the technique with partial COP-nets, there may be several “top-most” nodes (i.e. nodes with an in-degree of zero) as well as several “bottom-most” nodes (i.e. nodes with an out-degree of zero). In this case, all nodes with in-degree
(out-degree) of 0 are assigned a ˆuof 1 (0). Utility estimation then proceeds as
normal from there, until all utilities are estimated, and a preference prediction can be made.
As mentioned above, these utility estimates are made only relative to each other, and may not accurately reflect the true utilities for the outcomes. This is because only a small portion of the overall preference model is considered. What is important is that the utilities are accurate relative to each other. So if the utility of one outcome is 0.1 higher than the utility of another, it does not matter if the two utilities are estimated to be 0.9 and 0.8 or 0.2 and 0.1. What is important is that the utilities allow for accurate comparison amongst the outcomes that appear in the partial graph, so that the more preferred outcomes can be correctly identified.
6
Results
In this section we will discuss how the partial COP-net method compares with the current method in terms of accuracy of predictions, the time taken to make a single prediction and the size of the COP-nets that are generated by both methods.
Tests were run as follows. A list of attributes with their values and some pref-erences were arbitrarily generated with the assumption that those prefpref-erences were obtained from a real (human) user using some preference elicitation tech-nique. Then a full COP-net was generated using the current methodology from the provided attribute values and preferences. The nodes in the derived COP-net were topologically sorted to give a list of nodes representing outcomes from most to least preferred. Thus the first node in the list was a node with an in-degree of zero in the COP-net and the last node was a node with an out-degree of zero in the COP-net. The first outcome in the list was assigned a utility value of 1, and the last outcome a utility value of 0. Then real numbers between 1 and 0 were generated from a uniform distribution for the rest of the outcomes in decreasing order between the best and worst outcomes. These real numbers were considered to be the unknown “true” utilities of the outcomes.
Preferences were then predicted using COP-nets constructed from the current method as well as the proposed partial COP-net method, and the results from both methods were compared to the true result, obtained by comparing the true utilities of the outcomes to establish if the predictions were correct. A random
sample of pairs of outcomes was used as the test bed, consisting of at least 2500 pairs in each case for larger problems. For smaller problems, all pairs of outcomes were used.
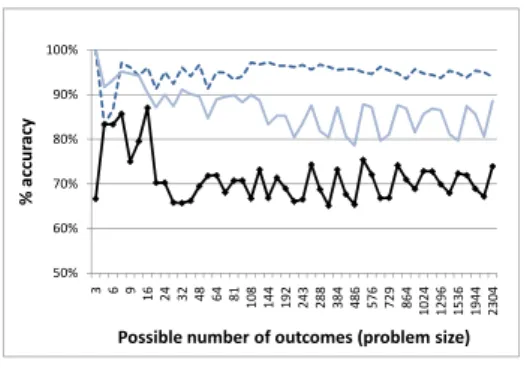
Figure 4 shows the accuracy of the partial COP-net method for preference prediction compared to using full COP-nets. In order to give a full comparison, a third baseline approach was also evaluated. While 50% might be considered the worst prediction accuracy one could achieve (i.e. by guessing), one could easily achieve better success than this by using preference information available and making more educated guesses. The baseline is thus an estimate of the best one could do using simplistic methods. We aim to ensure that, while we do not expect our partial COP-net method to achieve the same accuracy rate as the full COP-net approach, it should do reasonably well as compared to the baseline.
With the baseline approach, predictions were made simply by choosing the outcome with the higher number of individual attributes with preferred values. For example, consider two outcomes a1b1c1d1 and a2b2c2d2. If the elicited
pref-erences were a1 ≻ a2, b2 ≻ b1 and c1 ≻ c2, then the baseline method would
choose a1b1c1d1 as the more preferred, since it contains the preferred value for
two of the attributes, while a2b2c2d2only contains one, with one being unknown.
Figure 4 demonstrates that our partial COP-net method performs reasonably well when compared with the full COP-net method and the baseline approach. A paired t-test shows that the difference in means between results from the partial COP-net method and baseline approach is statistically significant at the p <0.05 level for all problem sizes.
50% 60% 70% 80% 90% 100% 3 6 9 1 6 2 4 3 2 4 8 6 4 8 1 1 0 8 1 4 4 1 9 2 2 4 3 2 8 8 3 8 4 4 8 6 5 7 6 7 2 9 8 6 4 1 0 2 4 1 2 9 6 1 5 3 6 1 9 4 4 2 3 0 4 % a cc u ra cy
Possible number of outcomes (problem size)
Fig. 4.Accuracy of the full COP-net approach (best), partial COP-net approach (2nd-best) and baseline approach (worst)
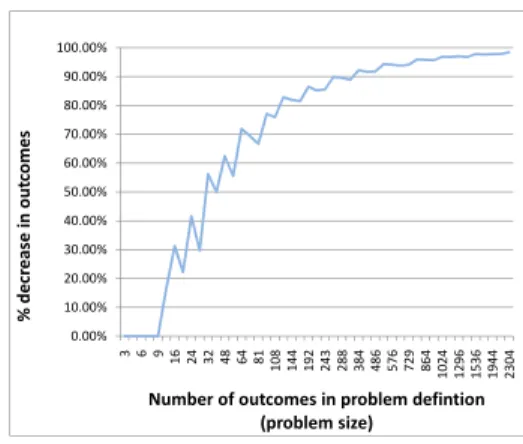
The main objective of this paper is to show that we can still obtain a reason-ably high prediction accuracy, while exploring only a tiny fraction of the space of outcomes. Figure 5 demonstrates that we have done just that, showing that we can ignore up to 98% of all outcomes for problems of only about 2000 outcomes.
The trend indicates that this number will continue to increase with the size of the problems. 0.00% 10.00% 20.00% 30.00% 40.00% 50.00% 60.00% 70.00% 80.00% 90.00% 100.00% 3 6 9 16 2 4 3 2 4 8 6 4 8 1 1 0 8 1 4 4 1 9 2 2 4 3 2 8 8 3 8 4 4 8 6 5 7 6 7 2 9 8 6 4 1 0 2 4 1 2 9 6 1 5 3 6 1 9 4 4 2 3 0 4 % d e cr e a se i n o u tc o m e s
Number of outcomes in problem defintion (problem size)
Fig. 5.Reduction in the number of outcomes considered by using the partial COP-net approach
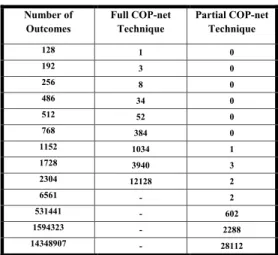
We finally examine what this reduction means in terms of computation speed. Table 1 shows that only the tiniest fraction of computation time is now required (going from 12128 seconds, or over three hours, to just two seconds for problems with 2304 outcomes), meaning that a vast space of situations that previously had too many outcomes to allow for any reasonable preference prediction technique is now manageable using our new technique.
7
Conclusions
The test results clearly demonstrate the benefits of the proposed methodology for constructing COP-nets. Although it sacrifices some prediction accuracy, it is able to provide enormous savings in terms of time and memory requirements. For example, in cases where it would have taken over three hours for the current methodology to build a COP-net and estimate utilities of outcomes, it took just a few seconds for the proposed methodology to do the same amount of work, with only a modest reduction in prediction accuracy (80-90% as opposed to 90-95% for problems with more than 500 outcomes). As a result of the significant reduction in the size of the graphs constructed, the proposed methodology uses very little memory. Perhaps most importantly, this reduction in time and space requirements allows predictions to be made quickly in cases where it would be completely infeasible to use the current methodology. With this new approach, partial COP-nets can be generated dynamically or on demand, and there is no need to generate the entire structure in advance.
! ! " ! ! " ! ! !! ! ! ! "
Table 1.Computation time (in seconds) required by the full COP-net approach vs. the partial COP-net approach. Note that problems with > 2304 outcomes were not solvable by the full COP-net approach in a reasonable amount of time.
References
1. C. Boutilier, R. I. Brafman, C. Domshlak, H. H. Hoos, and D. Poole. CP-nets: A tool for representing and reasoning with conditional ceteris paribus preference statements. Journal of Artificial Intelligence Research, 21:135–191, 2004.
2. C. Boutilier, R. Patrascu, P. Poupart, and D. Schuurmans. Regret-based utility elicitation in constraint-based decision problems. In Proceedings of IJCAI-05, pages 929–934, Edinburgh, Scotland, 2005.
3. U. Chajewska, D. Koller, and R. Parr. Making rational decisions using adaptive utility elicitation. In AAAI-00, pages 363–369, Austin, Texas, USA, 2000. 4. S. Chen. Reasoning with conditional preferences across attributes. Master’s thesis,
University of New Brunswick, 2006.
5. S. Chen, S. Buffett, and M. W. Fleming. Reasoning with conditional preferences across attributes. In Proc. of AI2007, pages 369–380, Montreal, Canada, 2007. 6. P. Faratin, C. Sierra, and N.R. Jennings. Using similarity criteria to make issue
trade-offs in automated negotiations. Artificial Intelligence, 142:205–237, 2002. 7. S.S. Fatima, M. Wooldridge, and N. R. Jennings. Optimal negotiation of multiple
issues in incomplete information settings. In Proc. 3rd Int. Conf. on Autonomous Agents and Multi-Agent Systems, pages 1080–1087, New York, NY, 2004.
8. N. R. Jennings, P. Faratin, A. Lomuscio, S. Parsons, C. Sierra, and M. Wooldridge. Automated negotiation: prospects, methods and challenges. Int. J. of Group De-cision and Negotiation, 10(2):199–215, 2001.
9. R. L. Keeney and H. Raiffa. Decisions with Multiple Objectives: Preferences and Value Tradeoffs. John Wiley and Sons, Inc., 1976.
10. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Prentice Hall, 1995.
11. T. Sandholm and C. Boutilier. Preference elicitation in combinatorial auctions. Combinatorial Auctions, Cramton, Shoham, and Steinberg, eds., 2006.