Association des contrôleurs Glissant – Floue à la commande de la trajectoire d’un robot mobile non holonome
Texte intégral
Figure

Outline
Documents relatifs
[r]
Dans le premier chapitre, nous présentons une synthèse bibliographique sur la modélisation des machines synchrones, puis nous présentons un cas particulier du modèle correspond à
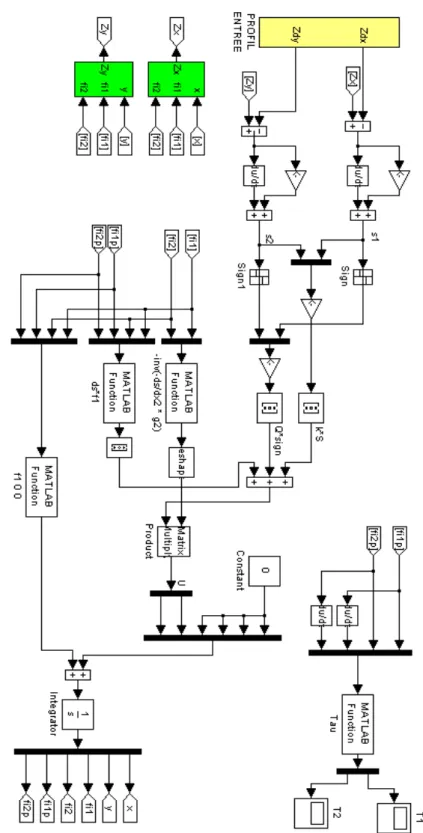
La simulation en boucle ouverte montre l'instabilité du système, ce qui implique la nécessité de l'application d'un régulateur en boucle fermée.La simulation en
… De tous temps Dorénaz a fait une commune séparée de Collonge ; cette commune recevait ses communiers particuliers ; elle a eu ses métraux, ses châtelains, son Conseil,
5) Placer le point D tel que ACBD soit un rectangle. Écrire une expression qui traduit ce programme en détaillant chaque étape.. 3) En rédigeant votre réponse à l’aide
Calculer l'âge moyen au dixième prés de ce groupe d'amis.(1 point)... Montrer que le triangle DEF est rectangle en
[r]
[r]
