Event-based boundary control of a linear 2x2 hyperbolic system via backstepping approach
Texte intégral
Figure
Documents relatifs
2 Until a refrigerator-stable vaccine becomes available, however, varicella vac- cine will not be incorporated into the recommend- ed immunization schedule in Canada, as most
Our research showed that an estimated quarter of a million people in Glasgow (84 000 homes) and a very conservative estimate of 10 million people nation- wide, shared our
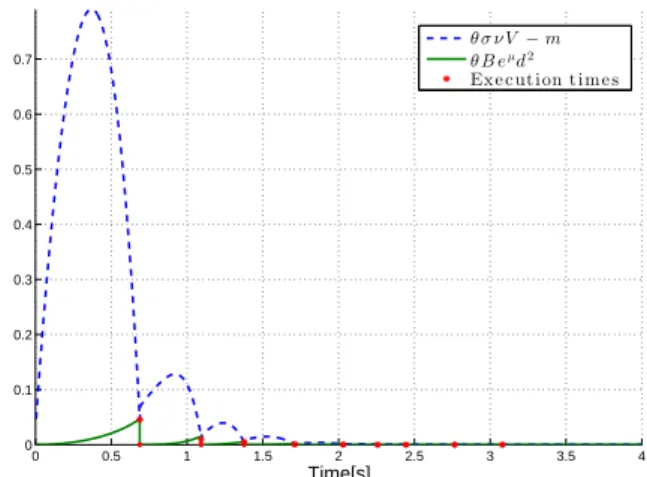
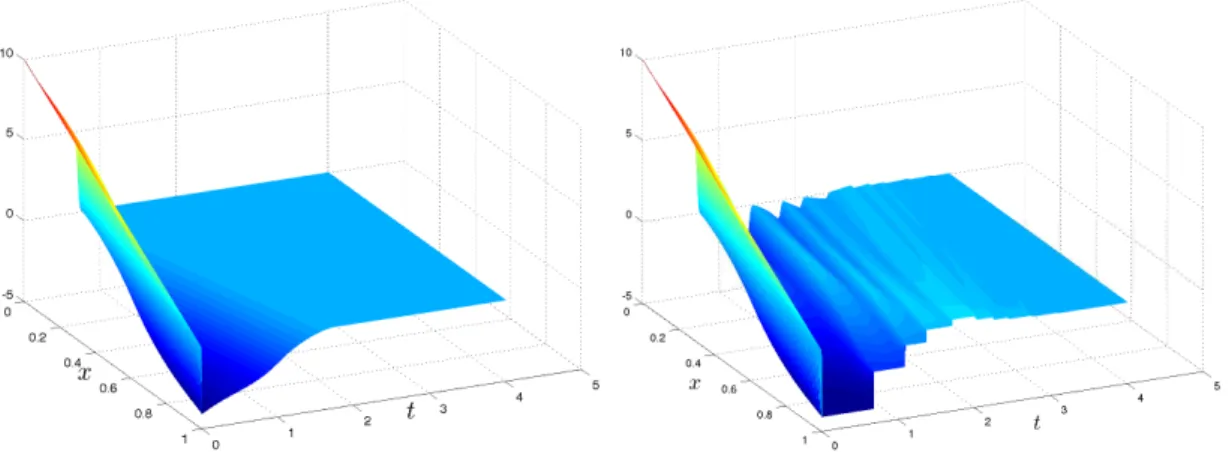
In this paper, we develop a sufficient stability condition for a class of coupled first-order linear hyperbolic PDEs with constant coefficients that appear when considering
Using the separator algebra inside a paver will allow us to get an inner and an outer approximation of the solution set in a much simpler way than using any other interval approach..
Recalling the impossibility of doubting his existence and looking back to his “sum”-intuition, the Cartesian
In [4] using a Lyapunov approach, the authors consider the stabilization by static output feedback of 2 × 2 linear (with constant and varying coe ffi cients) and quasilinear
The numerical values corresponding to the dynamic of the torsional variable were taken from the work of [4,18]. In practice to optimize drilling operations, the driller
Identifi- cation of immediate response genes dominantly expressed in juvenile resistant and susceptible Biomphalaria glabrata snails upon exposure to Schistosoma mansoni.
