يملعلا ثحبلاو يلاعلا ميلعتلا ةرازو
Département de Mathématiques
THESE
Présentée en vue de l’obtention du diplôme de
DOCTORAT EN MATHEMATIQUES
Option
Mathématiques Appliquées
Par
TOUATI FATIMA
Sous la direction de
Pr: MAKHLOUF AMAR
Devant le jury
PRÉSIDENT
: Laouer Abdelhamid M.C.A U.B.M. ANNABA.
EXAMINATEUR
: Jean Pierre Marco
M.C.A U.PARIS.VI. FRANCE.
EXAMINATRICE
: Maylis Irigoyen M.C.A U.PARIS.VI. FRANCE.
M.C
EXAMINATRICE
: Badi
Sabrina M.C.A U.8.MAI. GUELMA.
M.C
M.C
Badji Mokhtar University
Annaba
Université Badji Mokhtar
Annaba
راتخم يجاب ةعماج
ةبانع
Faculté des sciences
CYCLES LIMITES D’UNE CLASSE DES EQUATIONS
DIFFERENTIELLES DU SECOND ORDRE ET DE
Table des matières
Résumé iii
Abstract iv
Résumé en arabe v
Remerciements vi
Introduction générale vii
1 Notions préliminaires 1
1.1 Système dynamique . . . 1
1.2 Flot d’un système di¤érentiel . . . 2
1.3 Point d’équilibre . . . 2
1.4 Linéarisation . . . 2
1.5 Nature des points d’équilibres . . . 2
1.6 Stabilité des points d’équilibres . . . 6
1.7 Plan et portrait de phase . . . 6
1.8 Orbite périodique . . . 7
1.9 Cycle limite . . . 7
1.10 Amplitude de cycle limite . . . 8
1.11 Bifurcation . . . 8 1.12 Bifurcation de Hopf . . . 8 1.13 Equation de Liénard . . . 10 1.14 Equation de Du¢ ng . . . 10 1.15 Ensemble isochrone . . . 11 1.16 Résultats auxiliaires . . . 11
TABLE DES MATIÈRES
2 Méthode de la moyennisation 12
2.1 Introduction . . . 12
2.2 Méthode de Krylov et Bogoliubov . . . 12
2.3 Méthode de la moyennisation du premier ordre . . . 16
2.4 Méthode de la moyennisation du second ordre . . . 22
2.5 Une autre méthode de la moyennisation du premier ordre . . . 28
3 La forme des cycles limites d’une classe des systèmes di¤ é-rentiels polynomiaux de degré 5 31 3.1 Introduction . . . 31
3.2 Résultats principaux . . . 32
3.3 Transformation d’un système di¤érentiel polynômial en l’équa-tion d’Abel . . . 35
3.4 Preuves des Théorèmes . . . 36
3.5 Applications . . . 42
4 Le nombre de Hilbert d’une classe d’équations di¤ érentielles 47 4.1 Introduction . . . 47
4.2 Résultats principaux . . . 49
4.3 Preuve du Théorème 4.2.1 . . . 49
4.4 Preuve du Corollaire 4.2.1 . . . 51
5 Les cycles limites d’une classe d’équations di¤ érentielles de second ordre et de l’équation di¤ érentielle de Du¢ ng 52 5.1 Introduction . . . 52
5.2 Cycles limites de l’équation di¤érentielle x+x f (t) = "F (t; x; x) 53 5.3 Cycles limites de l’équation di¤érentielle x + x = "F (t; x; x) . 59 5.4 Cycles limites de l’équation di¤érentielle de Du¢ ng . . . 61
6 Conclusion et Perspectives 69 7 Appendice 70 7.1 Classi…cation des racines d’un polynôme de degré 5. . . 70
Résumé
L’objectif de cette thèse est d’étudier les cycles limites des équations di¤éren-tielles du second ordre perturbées par un petit paramètre, et les cycles limites de l’équation di¤érentielle de Du¢ ng en utilisant la méthode de la moyen-nisation du premier ordre. Notre résultat montre qu’il existe des équations di¤érentielles de second ordre de la forme
x + x f (t) = "F (t; x; x);
ayant un cycle limite quand " tend vers zéro, où F (t + 2 ; x; x) = F (t; x; x); et f est une fonction 2 périodique tel que
2 Z 0 f (t) sin(t)dt = 2 Z 0 f (t) cos(t)dt = 0:
De même en utilisant la théorie de la moyennisation du premier ordre, nous avons étudié les cycles limites des équations di¤érentielle précédentes quand f (t) = 0.
On a aussi étudié les cycles limites de l’équation di¤érentielle de Du¢ ng du type
x + x + "f (x) = " cos(t);
où " est un petit paramètre et f est un polynôme. On montre qu’au plus cinq cycles limites qui bifurquent de l’origine de cette équation dans le cas où f est un polynôme de degré cinq quand " = 0. Notre travail est enrichi par plusieurs exemples.
Mots clé :cycle limite, perturbation, méthode de la moyennisation, système di¤érentiel, solution périodique, bifurcation, équation de Du¢ ng.
Abstract
The objective of this thesis is to study the limit cycles of the di¤erential equations of second order perturbed by a small parameter, and the limit cycles of Du¢ ng di¤erential equation by using the averaging method of the …rst order. Our result shows that there are di¤erential equations of the second order of the form
x + x f (t) = "F (t; x; x);
having a limit cycle when " tends to zero, where F (t + 2 ; x; x) = F (t; x; x); and f is a fonction 2 périodic such that
2 Z 0 f (t) sin(t)dt = 2 Z 0 f (t) cos(t)dt = 0:
Similarly by using the theory of the averaging method of the …rst order, we studied the limit cycles of the previous di¤erential equations when f (t) = 0. We also study the limit cycles of Du¢ ng di¤erential equation of the type
x + x + "f (x) = " cos(t);
where " is a small parameter and f is a polynomial. We show that at most …ve limit cycles bifurcate of the origin of this equation in the cas where f is a polynomial of degree …ve when " = 0. Our work enriched by several examples.
Key words : limit cycle, perturbation, averaging method, di¤erential sys-tem, periodic solution, birfucation, Du¢ ng’s equation.
v
صخلم
دلا نم ةيلضافتلا تلاداعملل دحلا تارود ةسارد وه ةلاسرلا هذه نم فدهلا ةيناثلا ةجر ,ريغص طيسو ةطساوب ةبرطضملا غنفودل ةيلضافتلا ةلداعملل دحلا تارود و ةقيرط مادختساب ةجردلا نم طسوتملا لأا .ىلو ن جئات ان تلاداعم دجوت هنأ تبثت ردلا نم ةيلضافت لكشلا نم ةيناثلا ةج 𝑥̈ + 𝑥 − 𝑓(𝑡) = 𝜀𝐹(𝑡, 𝑥, 𝑥̇), ةرود اهيدل امل دحلا 𝜀 ثيحب ,رفصلا ىلإ لوؤي 𝐹(𝑡 + 2𝜋, 𝑥, 𝑥̇) = 𝐹(𝑡, 𝑥, 𝑥̇) و 𝑓 ةلاد 2𝜋 د ةيرو ملعلا عم نأ ∫ 𝑓(𝑡) sin(𝑡)𝑑𝑡 = ∫ 𝑓(𝑡) cos(𝑡) 𝑑𝑡 = 0.2𝜋 0 2𝜋 0 و ةقيرط مادختساب و لثملاب ىلولأا ةجردلا نم طسوتملا , تلاداعملا انسرد ةقباسلا ةيلضافتلا لجأ نم . 𝑓(𝑡) = 0 اضيأ انسرد غنفودل ةيلضافتلا ةلداعملل دحلا تارود عونلا نم 𝑥̈ + 𝑥 + 𝜀𝑓(𝑥) = 𝜀 cos(𝑡), ثيح 𝜀 و ةيافك ريغص 𝑓 .دودح ريثك دجوي هنأ انتبثأو رثكلأا ىلع مخ س هل لصلأا نم ةعرفتم دحلا تارود ةلداعملا هذ تناك اذإ ام ةلاح يف 𝑓 امل ةسماخلا ةجردلا نم دودح ريثك 𝜀 = 0 . لا تاملكلا ةيسيئر : بارطضلإا ,دحلا ةرود ,يرود لح ,يلضافت ماظن ,طسوتملا ةقيرط , ,عرفت غنفود ةلداعم .Remerciements
Je tiens tout d’abord à remercier Dieu le tout puissant et miséricordieux, qui nous a donné la force et la patience d’accomplir ce Modeste travail.
En second lieu, Je voudrais remercier tout particulièrement Monsieur Ma-khlouf Amar, Professeur au département de mathématiques à l’université Badji-Mokhtar Annaba, qui m’a dirigé tout au long de ces années de thèse. Il a toujours été disponible, à l’écoute de mes nombreuses questions, et s’est toujours intéressé à l’avancée de mes travaux. Les nombreuses discussions que nous avons eues ainsi que ses conseils sont pour beaucoup dans le résultat …nal de ce travail. Sa capacité d’analyse et son enthousiasme m’ont montré que le monde de la recherche pouvait être un univers passionnant. En…n, ses nombreuses relectures et corrections de cette thèse ont été très appréciables. Cette thèse lui doit beaucoup. Pour tout cela merci.
Mes respectueux remerciements à Monsieur Laouar Abdelhamid, Maître de conférences à l’université Badji Mokhtar- Annaba, pour m’avoir fait l’honneur de présider le jury de soutenance de cette thèse.
Mes vifs remerciements vont également aux membres du jury : Monsieur Jean Pierre Marco, Maître de conférences à l’université Paris 6- France, Ma-dame Maylis Irigoyen, Maître de conférences à l’université Paris 6- France, et Madame Badi Sabrina, Maître de conférences à l’université de Gualma pour l’honneur qu’ils m’ont fait en acceptant de faire partie du jury et pour l’inté-rêt qu’ils ont porté à notre recherche en acceptant d’examiner notre travail et de l’enrichir par leurs propositions.
En…n, Je dédie cette thèse à la mémoire de ma mère, malgré son absence elle sera toujours vivante dans mon cœur.
Introduction générale
Depuis Isaac Newton, les équations di¤érentielles jouent un rôle essentiel pour la modélisation des systèmes physiques, mécaniques, chimiques, biologiques ou économiques et une part prépondérante des phénomènes modélisés par les mathématiques le sont par des équations di¤érentielles.
Lorsque ces équations ne font intervenir que des fonctions d’une variable, et souvent cette variable sera le temps, on parle d’équations di¤érentielles ordinaires. De telles équations apparaissent chaque fois que l’on veut dé-crire l’évolution déterministe d’un système au cours du temps. Dans d’autres circonstances, la modélisation aboutit à des équations faisant intervenir les dérivées de fonctions de plusieurs variables, On parle alors d’équations aux dérivées partielles. Mais, ces équations aux dérivées partielles dans des situa-tions se ramènent à des équasitua-tions di¤érentielles ordinaires.
Le premier objectif des chercheurs est l’étude des systèmes dynamiques, c’est à dire l’étude qualitative des équations di¤érentielles ordinaires. Le terme « système dynamique » est apparu au début du XXeme siècle entre la
publi-cation du traité fondateur de Henri- Poincaré [41] « Les méthodes nouvelles de la mécanique céleste » en 1892, et celle, en 1927, de la monographie de Birkho¤ [2] justement intitulée « Dynamical systems » . En général par sys-tème dynamique, on sous-entend tout syssys-tème qui évolue au cours du temps. Cette évolution est décrite par des équations di¤érentielles ou des applica-tions. L’étude des systèmes dynamiques traite donc l’évolution temporelle des systèmes physiques, économiques, chimiques sans pour autant faire ré-férence à la théorie sous-jacente qui détermine leurs équations d’évolution. On cesse alors de mettre l’accent sur les méthodes explicites de résolution, dont Poincaré avait montré qu’elles ne permettaient pas de comprendre les systèmes les plus intéressants, comme le problème des trois corps. Délaissant les formules exactes, et les développements en série, les mathématiques se concentrèrent alors sur les propriétés qualitatives, géométriques ou
proba-CHAPITRE 0. INTRODUCTION GÉNÉRALE
bilistes de ces équations. Ce n’est plus une seule solution, mais toutes les solutions à la fois que l’on considère dans ce nouveau cadre. Des questions considérées comme importantes perdent leur attrait, alors que de nouvelles questions viennent naturellement au premier plan. On peut par exemple cher-cher l’allure des solutions au voisinage d’un point, les quantités invariantes par le mouvement, les points d’équilibre....etc.
Peu après avoir acquis son nouveau nom, la théorie des systèmes dynamiques fut utilisée pour la première fois pour la modélisation de systèmes biologiques. Il s’agissait de comprendre les ‡uctuations dans la répartition des espèces pêchées dans l’Adriatique. En 1926; le mathématicien italien Vito Volterra mit au point le modèle « proie-prédateur » , expliquant les modi…cations de l’équilibre des di¤érentes espèces pêchées par la diminution de la pêche durant la première guerre mondiale [22].
La théorie des systèmes dynamiques reste depuis cette époque un domaine très vivant des mathématiques dont le champ des applications n’a cessé de se développer.
Le mathématicien confronté à une équation di¤érentielle se pose d’abord la question de l’existence et l’unicité des solutions. On sourit souvent de ces « problèmes existentiels » des mathématiciens ! « Votre équation modélise le mouvement d’une particule » lui dit-on, « or ce mouvement existe et il est unique, donc votre équation a une solution ! » Mais l’équation modélise-t-elle correctement le phénomène réel que l’on étudie ? Et jusqu’à quelle limite ce modèle est-il valable ? Tout modèle néglige certains aspects de la réalité en l’idéalisant, et si pour certaines valeurs du paramètre l’équation n’a pas de solution, c’est que le modèle ne re‡ète pas la réalité. Il est donc raisonnable, avant d’étudier les solutions, de s’assurer de leur existence.
Le problème d’unicité et d’existence avait été introduit par Cauchy qui le premier avait établi deux théorèmes d’existence et d’unicité des solutions et dont le but était donc de développer les solutions en série autour des points singuliers. Il utilisait, en fait l’analyse de la variable complexe. Il pensait les solutions des équations di¤érentielles comme des fonctions dé…nies impli-citement par ces équations. L’étude des équations di¤érentielles était donc simplement, pour lui comme pour ceux qui l’ont suivi, une branche de la théorie des fonctions.
Briot et Bouquet emboitèrent le pas à Cauchy, corrigeant son travail, éten-dant les hypothèses de son théorème d’existence, eux aussi se concentrèrent sur l’étude locale autour des points singuliers.
Plus tard, lorsque Poincaré développait déja son étude qualitative, Weiers-trass énonça un autre théorème d’existence des solutions des équations di¤é-rentielles. Toujours dans le cadre des fonctions analytiques de la variable com-plexe, émet l’idée d’établir des développements di¤érents autour de chaque point singulier du système pour ensuite dé…nir la solution globale (c’est à dire valable sur tout le plan) par prolongement analytique : la solution se-rait dé…nie par des développements di¤érents suivant que l’on se trouve à proximité de tel ou tel point singulier.
Poincaré lui-même, quand il commença à s’intéresser aux équations di¤éren-tielles, a pour but d’améliorer le travail de ses prédécesseurs Briot et Bouquet sur le développement en série des solutions. Puis, changeant de direction, il introduit trois changements majeurs dans la façon d’étudier les équations di¤érentielles :
Il décide d’étudier la solution de manière globale, c’est à dire sur l’espace des phases dans son ensemble.
Il abandonne la variable complexe et étudie dès lors des fonctions réelles à variable réelle.
Il géométrise le problème.
Parmi les objets géométriques que Poincaré introduit dans son étude se trouvent les arcs ou cycles sans contact. Ce sont des courbes fermées qui ne sont tangentes en aucun point à une trajectoire. C’est à dire que si F = 0 est un arc sans contact et si on calcule F , et bien jamais sur tout F = 0, F ne sera nul. Autrement dit, F reste de signe constant sur toute la courbe F = 0. Il ira même jusqu’à utiliser des familles de cycles sans contact pour montrer que dans la région où existe cette famille, il ne peut y avoir de trajectoire périodique !
Poincaré introduit un système topographique de courbes. Parmi celles-ci, certaines courbes invariantes de l’espace des phases : les trajectoires de type centre, les variétés stables et instables des points …xes. Ces courbes par-ticulières divisent l’espace des phases en morceaux juxtaposés, se sont les séparatrices des régions de l’espace des phases. Le portrait de phase à l’inté-rieur de chacun de ces morceaux est alors équivalent à un portrait de phases simple.
Après les questions d’existence et d’unicité, ce sont les questions de stabilité qui apparaissent naturellement. Le cas le plus simple de stabilité, avec lequel
CHAPITRE 0. INTRODUCTION GÉNÉRALE
nous sommes tous familiers, est celui des positions d’équilibre du pendule rigide. La position usuelle, « masse en bas » est stable, celle « renversée » ou « masse en haut » est instable. Cela signi…e que si l’on déplace légèrement un pendule « masse en bas » , il reste près de sa position d’équilibre, alors que même si vous réussissez à mettre un pendule « masse en haut » , le moindre courant d’air l’éloignera de cette position.
En 1907 de Poincaré, Aleksandr Lyapunov [36] a développé le critère de sta-bilité portant son nom, Il étudia la stasta-bilité du mouvement. En utilisant une fonction de force qu’il note V (x; y), il établit une technique pour déterminer la stabilité d’un point d’équilibre. Grâce à cette technique, on peut tester la stabilité d’une solution asymptotique sans connaître l’expression analytique des solutions. La fonction qu’il a introduite est maintenant appelée fonction de Lyapunov, dé…nissant du même coup la notion de point de stabilité et de trajectoire stable.
Un cycle limite est une orbite périodique isolé dans l’ensemble de toutes les solutions périodiques. Un des objectifs des chercheurs dans l’étude qualitative des équations di¤érentielles ordinaires est la détermination et l’existence des cycles limites. Les cycles limites des champ de vecteurs planaires ont été dé…nis par H. Poincaré. A la …n des années 1920, Van del Pol, Liénard et Andronov ont prouvé aussi qu’un cycle limite est une trajectoire. Après ces travaux sur la notion de cycle limite, d’autres propriétés de ce dernier ont été étudiées largement par des mathématiciens, des physiciens et plus récemment par des chimistes, des biologistes, et des économistes, etc.
En 1900, le mathématicien mondialement connu David Hilbert a présenté une liste de 23 problèmes mathématiques remarquables au deuxième congrès international des mathématiciens. Le seizième problème de Hilbert comporte deux parties. La seconde partie pose la question du nombre maximal des cycles limites pour une équation di¤érentielle polynomiale plane de degré donné ; cette question est encore ouverte.
Le 16eme Problème de Hilbert consiste à déterminer le nombre maximal H n
des cycles limites d’un système polynômial de degré n: 8 > > > < > > > : x = n P i+j=0 aijxiyj; y = n P i+j=0 bijxiyj; (1)
Puisque les systèmes linéaires dans R2 n’ont pas de cycles limites, il s’ensuit
que H1 = 0. Pour la classe la plus simple des systèmes non-linéaires (1) avec
n = 2, le nombre de Hilbert H2 n’a pas été déterminé.
En 1962, le mathématicien russe N. V. Bautin [1] a prouvé que n’importe quel système quadratique (1) avec n = 2, a au plus trois cycles limites. Et pendant quelque temps il a été supposé cela H2 = 3. En 1979, les mathématiciens
chinois S. L. Shi, L. S. Chen et M. S. Wang ont donnés des exemples des systèmes quadratiques avec quatre cycles limites (voir [45]). D’où H2 4.
Concernant H3, il est connu qu’un système cubique peut avoir au moins onze
cycles limites, (voir [50]). Aussi, en 1983, J. B. Li. a donné un exemple d’un système cubique avec onze cycles limites. Ainsi, tout ce qui peut être dit en ce moment est que H3 11. Le 16eme Problème de Hilbert pour les systèmes
polynômiaux dans le plan a produit beaucoup de recherche mathématique intéressante ces dernières années et continuera probablement le faire pendant quelque temps.
Une méthode classique pour produire des cycles limites est de perturbé un système qui a un centre. La notion d’un centre a été dé…nie par Poincaré comme étant un point isolé singulier entouré par des orbites périodiques. Les chercheurs ont donnés cinq méthodes pour analyser le nombre de cycles limites bifurquant des orbites périodiques ayant un centre :
La première méthode est basée sur l’application de retour de Poincaré. La deuxième méthode est basée sur l’intégrale de Poincaré Melnikov. La troisième est basée sur l’intégrale Abélienne.
La quatrième est la méthode du facteur intégrant inverse. La cinquième est la méthode de la moyennisation.
La dernière méthode est la base de notre travail. Au début du XXeme siècle
les physiciens russes Krylov et Bogolyubov développèrent cette méthode qui permet de résoudre des problèmes non linéaires grâce à l’hypothèse de la périodicité. Cette méthode consiste à donner une relation quantitative entre les solutions d’un certain système di¤érentiel périodique non autonome et celle de son système di¤érentiel moyenné lequel est autonome. et aussi la forme des cycles limites bifurqués.
Les chercheurs ont étudié plusieurs équations di¤érentiels planaires en utili-sant les méthodes précédentes pour la détermination des cycles limites. Parmi
CHAPITRE 0. INTRODUCTION GÉNÉRALE
ces équations, …gure l’équation di¤érentielle du second ordre de la forme x + f (x)x + g(x) = e(t); (t; x)2 R R: (2) Cette équation joue un rôle important dans la théorie des oscillateurs non linéaires, comme l’oscillateur de ressort mécanique avec la force de rappel g(x), le coe¢ cient de résistance f (x) et le terme de force e(t). Si la fonction f (x) est une constante, alors l’équation précédente est appelé équation de Du¢ ng . Elle s’écrit
x + cx + g(x) = e(t); (t; x)2 R R; (3) où c est une constante et c 0; g(x)est une fonction de classe C2 et e(t) est
une fonction continue et périodique.
Cette équation fut établie au début du siècle par l’ingénieur George Du¢ ng, dans le but de modéliser les vibrations forcées.
L’oscillateur de Du¢ ng réussit non seulement à modéliser des systèmes mé-caniques, mais aussi certains systèmes électriques et permet à l’analyse non linéaire de réaliser ses premières applications pratiques.
Si c = e(t) = 0; g(x) = ax + bx3 avec a > 0 et b > 0, l’équation de Du¢ ng
(3) devient
x + ax + bx3 = 0: (4)
Cette équation possède dans l’espace de phase xoy les trajectoires donnée par l’équation y2 2 + a x2 2 + b x4 4 = c1:
Alors toutes les solutions de l’équation de Du¢ ng (4) sont périodiques. Le travail réalisé dans le cadre de cette thèse est présenté en cinq chapitres.
Le premier chapitre : Notions préliminaires.
Ce chapitre est consacré aux dé…nitions des di¤érents outils mathématiques qui sont nécessaires pour l’étude de cette thèse. On représentera alors quelques rappels, et notions préliminaires sur les systèmes di¤érentiels planaires. On introduira dans ce rappel des dé…nitions concernant le système dynamique, le point singulier, la linéarisation au voisinage d’un point singulier, l’orbite périodique et le cycle limite. On donnera la nature et la stabilité d’un point singulier. On introduira un rappel sur la bifurcation de Hopf, le système de Liénard et l’équation di¤érentielle de Du¢ ng.
Le deuxième chapitre : Théorie de la moyennisation.
Ce chapitre portera sur la théorie de la moyennisation du premier et du second ordre pour étudier le nombre des cycles limites d’un système di¤éren-tiel planaire. On y trouvera quelques exemples du premier et second ordre de cette méthode.
Le troisième chapitre : La forme des cycles limites d’une classe des systèmes di¤érentiels polynomiaux de degré 5.
Dans ce chapitre, on étudie l’article [48], concernant la recherche des cycles limites des deux classes de systèmes polynomiaux non linéaires, homogènes de degré cinq par la méthode de la moyennisation d’ordre 2. Dans la première classe, on étudie la bifurcation de Hopf de cycle limite à l’origine. Dans la deuxième classe on étudie les cycles limites qui bifurquent des orbites périodiques du centre linéaire
( x = y y = x:
Le quatrième chapitre : Le nombre de Hilbert d’une classe d’équations di¤érentielles.
Dans ce chapitre, on étudie l’article [32], concernant le nombre maximum de cycles limites de l’équation di¤érentielle
dr d = a( ) n P j=0 aj( )rj
dans la région du cylindre ( ; r) 2 S1
R où le dénominateur ne s’annule pas, a; a0; a1; ::::::; an: S1 ! R des fonctions continues et 2 -périodiques.
Le cinquième chapitre : Les cycles limites d’une classe d’équations dif-férentielles de second ordre et de l’équation de Du¢ ng
Ce chapitre contient une étude des cycles limites d’une classe d’équations di¤érentielles du second ordre et les équations di¤érentielles du Du¢ ng qui peuvent être considérées comme une perturbation particulière de l’oscillateur harmonique. on utilisera la méthode de la moyennisation du premier ordre. Ce chapitre a été publié dans le journal " Annals of Di¤erential Equations " A. Makhlouf, F. Touati: " Limit cycles for a class of second order di¤eren-tial equations and Du¢ ng equation ", Ann. of Di¤. Eqs 29 : 4(2013); 443 455.
Chapitre 1
Notions préliminaires
L’objectif essentiel de ce chapitre est d’étudier quelques notions générales et préliminaires pour l’étude qualitative des systèmes dynamiques et des équa-tions di¤érentielles ordinaires. Nous commençons par donner les noéqua-tions de système dynamique, ‡ot, point critique, et linéarisation. Ensuite, nous exa-minons la nature et la stabilité des points d’équilibres. Nous introduisons aussi quelques rappels sur l’orbite périodique, le cycle limite, la bifurcation et la bifurcation de Hopf. En…n nous terminons par donner les dé…nitions de l’équation de Du¢ ng et de l’équation de Liénard.
1.1
Système dynamique
Dé…nition 1.1.1 Un système dynamique sur Rn est une application U : R Rn
! Rn dé…nie et continue telle que
U ( ; x) : R ! Rn est continue,
U (t; ) : Rn ! Rn est continue, U (0; x) = x;
U (t + s; x) = U (t; U (s; x)) 8 t; s 2 R; 8x 2 Rn:
Exemple 1.1.1 Soit le système di¤érentiel (
x = Ax; x(0) = x0;
(1.1) où A est une matrice n n, et x 2 Rn. Le système (1:1) engendre un système
CHAPITRE 1. NOTIONS PRÉLIMINAIRES
dynamique donné par
U (t; x) = eAtx:
1.2
Flot d’un système di¤ érentiel
Dé…nition 1.2.1Soit le système
x = f (x); (1.2)
où x(0) = x0, x 2 Rn; et f 2 C1(Rn):
Soit (t; x0) la solution de (1:2). L’ensemble des applications t : Rn ! Rn
dé…nies par
t(x0) = (t; x0);
est appelé le ‡ot de l’équation di¤érentielle (1:2):
Remarque 1.2.1Le ‡ot est dit autonome si f ne dépend pas explicitement du temps, sinon il est dit non autonome.
1.3
Point d’équilibre
Dé…nition 1.3.1 On appelle point d’équilibre, ou point critique, ou point …xe, ou point singulier du système (1:2); tout point x0 2 Rntel que f (x0) = 0:
1.4
Linéarisation
Dé…nition 1.4.1 x = Ax; où A = Df (x0) = ( @fi @xj (x0))1 i; j n (1.3)est appelé le système linéarisé du système (1:2) en x0 2 Rn:
1.5
Nature des points d’équilibres
1.5. NATURE DES POINTS D’ÉQUILIBRES
Dé…nition 1.5.1 Soit le système di¤érentiel linéaire planaire (1:3) où A est une matrice d’ordre 2; 1 et 2 sont les valeurs propres de cette matrice. On
distingue les di¤érents cas selon les valeurs propres 1 et 2 de la matrice A:
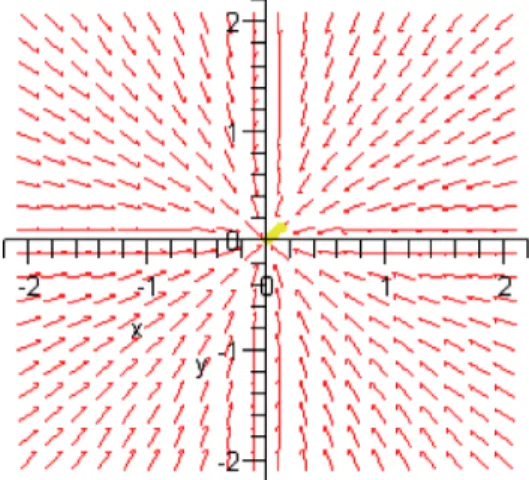
i)Si 1 et 2 sont réelles non nulles et de signe di¤érent, le point critique
x = x0 est un selle, il est toujours instable. (Fig 1.1).
Fig 1.1 Selle
ii)Si 1 et 2 sont réelles non nulles et de même signe.
Si 1 < 2 < 0 , le point critique x = x0 est un nœud stable (Fig 1:2).
CHAPITRE 1. NOTIONS PRÉLIMINAIRES
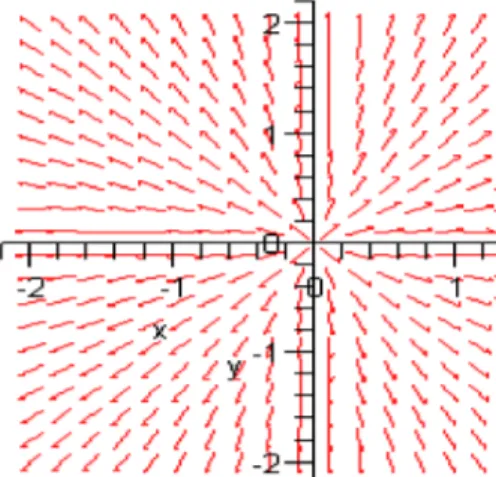
Si 0 < 1 < 2 , le point critique x = x0 est un nœud instable (Fig 1:3).
Fig 1.3 Noeud Instable
Si 1 = 2 = , le point critique x = x0 est un nœud propre, il est
stable si < 0 et instable si > 0 (Fig 1:4).
Fig 1.4 Noeud propre stable
iii) Si 1 et 2 sont complexes conjuguées c-à-d 8j = 1; 2 ; j = j + i j
1.5. NATURE DES POINTS D’ÉQUILIBRES
stable si Re( j) < 0 et instable si Re( j) > 0. (Fig 1:5 et Fig 1:6).
Fig 1.5 Foyer stable
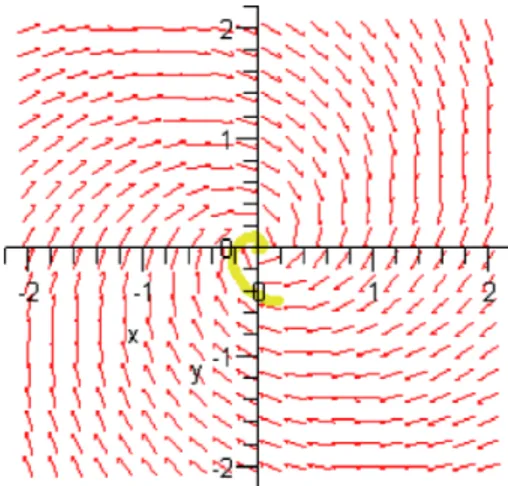
Fig 1.6 Foyer instable
iv) Si 1 et 2 sont imaginaires pures avec Im( j)6= 0 et Re( j) = 0,
CHAPITRE 1. NOTIONS PRÉLIMINAIRES
pas asymptotiquement stable. (Fig 1:7).
Fig 1.7 Centre
1.6
Stabilité des points d’équilibres
Dé…nition 1.6.1 On dit qu’un point d’équilibre x0 est stable si 8 " > 0; 9
> 0 tel que, si
kx x0k =) k (t; x) x0k " 8t 0:
Dé…nition 1.6.2 On dit qu’un point d’équilibre x0 est asymptotiquement
stable s’il est stable et s’il existe un voisinage de x0 tel que pour tout x dans
ce voisinage, lim
t!1 (t; x) = x0:
Théorème 1.6.1Soit le système linéaire (1:3): Le point x = x0 est
asymp-totiquement stable si et seulement si toutes les valeurs propres de A sont de partie réelles strictement négatives. Si A a au moins une valeur propre de partie réelle strictement positive, alors le point x = x0 est instable.
1.7
Plan et portrait de phase
Dé…nition 1.7.1Soit le système planaire 8 < : x = P (x; y); y = Q(x; y); (1.4)
1.8. ORBITE PÉRIODIQUE
Un portrait de phase est l’ensemble des trajectoires dans l’espace de phase. En particulier, pour les systèmes autonomes d’équations di¤érentielles ordinaires de deux variables, les solutions (x(t); y(t)) du système (1:4) représentent dans le plan (x; y) des courbes appelées orbites. Les points critiques de ce système sont des solutions constantes et la …gure complète des orbites de ce système ainsi que ces points critiques représentent le portrait de phase et le plan (xoy) qui est le plan de phase.
1.8
Orbite périodique
Dé…nition 1.8.1 On appelle orbite périodique toute trajectoire t(x) de
(1:4) tel qu’il existe un nombre T > 0, véri…ant
(t + T; x) = (t; x) (1.5)
Le plus petit réel T > 0 qui véri…e (1:5) est appelé période.
1.9
Cycle limite
Dé…nition 1.9.1 Un cycle limite C du système (1:4) est une trajectoire fer-mée isolée dans l’espace de phases. Ceci signi…e qu’il existe un voisinage de C dans lequel il n’y a pas d’autre courbes fermées. Quand toute les trajectoires voisines approchent le cycle limite C lorsque t ! +1 , il est dit stable ou attractif , si en revanche cela se produit lorsque t ! 1 , il est dit instable ou non attractif.
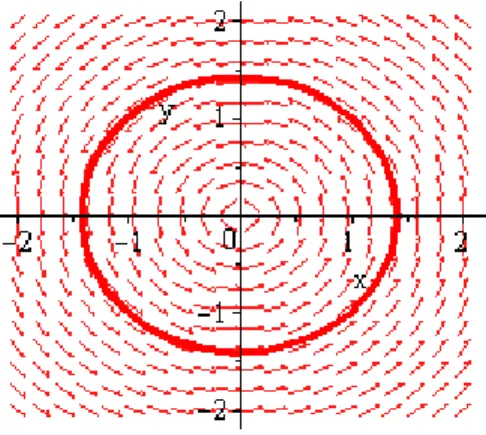
Exemple 1.9.1 Soit l’équation di¤érentielle
x + (x2+ x2 1)x + x = 0:
En coordonnées polaires x = r cos ; y = r sin ; l’équation devient (
r = r(r2 1) sin2 ;
= 1 (r2 1) sin cos : Une solution particulière est
CHAPITRE 1. NOTIONS PRÉLIMINAIRES
correspond à un cycle limite, x = cos t; y = sin t: De plus on a r > 0 quand 0 < r < 1
r < 0 quand r > 1; alors ce cycle limite est stable.
1.10
Amplitude de cycle limite
Dé…nition 1.10.1L’amplitude du cycle limite est la valeur maximale de la variable x du cycle limite.
1.11
Bifurcation
Dé…nition 1.11.1Soit le système di¤érentiel
x = f (x; ); (1.6)
où 2 R; f 2 C1(E)
, E est un ouvert de Rn. La bifurcation désigne tout
changement qualitatif et topologique du comportement des solutions de (1:6) quand le paramètre change. La valeur 0 pour laquelle f (x; 0) n’est pas
structurellement stable est dite valeur de bifurcation.
1.12
Bifurcation de Hopf
Théorème 1.12.1 (Poincaré-Andronov-Hopf). Soit le système di¤érentiel
(
x = f (x; y; );
y = g(x; y; ): (1.7)
Si les données f et g satisfont les hypothèses suivantes : 1:Les fonctions f et g sont C1:
2: f (0; 0; ) = g(0; 0; ) = 0:
3:Si, désignant par ( ) i ( ) les valeurs propres de la partie linéaire du système à l’origine, on a :
1.12. BIFURCATION DE HOPF < 0 =) ( ) < 0 > 0 =) ( ) > 0 0 (0)6= 0 (0)6= 0
4: Pour = 0; l’origine est un attacheur du système di¤érentiel. Alors le système (1:7) possède les propriétés suivantes :
Pour < 0 l’origine est un état stationnaire stable.
Pour > 0 l’origine est un état stationnaire instable entouré par un cycle limite stable.
le diamètre du cycle limite est de l’ordre de p : Exemple 1.12.1 Considérons le système
8 < :
x = x + y x(x2+ y2);
y = x + y y(x2+ y2); (1.8)
où est le paramètre de la bifurcation. Le système (1:8) a un seul point d’équilibre (0; 0).
la matrice jacobienne Df (0; 0) est donnée par
Df (0; 0) = 1
1 ;
admet les valeurs propres 1;2 = i:
Si < 0; alors l’origine est un foyer stable. Si > 0; alors l’origine est un foyer instable.
Si = 0; la matrice jacobienne en ce point possède une pair de va-leurs propres imaginaires pures, donc l’origine est un centre pour le système linéarisé mais pour le système non linéaire il peut être un centre ou un foyer.
En coordonnées polaires, le système (1:8) devient (
r = r( r2);
= 1:
Si 0;l’origine est un foyer stable, si > 0; l’origine est un foyer instable entouré par un cycle limite d’amplitude r = p :
CHAPITRE 1. NOTIONS PRÉLIMINAIRES
1.13
Equation de Liénard
Dé…nition 1.13.1L’équation de Liénard est une équation de la forme
x + f (x)x + g(x) = 0: (1.9)
Dans le plan de phase, cette équation s’écrit x = y;
y = f (x)y g(x); (1.10)
en utilisant le changement de variables (X; Y ) ! (x; y + F (x)) où F (x) = Rx
0 f (s)ds; le système (1:10) est équivalent à
X = Y F (x); Y = g(x);
en garde les mêmes notations (x et y) pour les nouvelles variables, on obtient x = y F (x);
y = g(x); (1.11)
1.14
Equation de Du¢ ng
Dé…nition 1.14.1 L’équation de Du¢ ng est une équation di¤érentielle de second ordre non linéaire de la forme
x + cx + g(x) = p(t): (1.12)
où g : R ! R est une fonction continue et localement Lipschitzienne, c est une constante et c 0; p : R ! R est continue, et T -périodique.
Une classe importante de l’équation (1:12) est donnée par l’équation
x + x + x + x3 = cos(wt); (1.13)
1.15. ENSEMBLE ISOCHRONE
1.15
Ensemble isochrone
L’ensemble isochrone est un ensemble formé uniquement par des solutions périodiques, qui ont la même période.
1.16
Résultats auxiliaires
Lemme 1.15.1 Pour n; m 2 N ,on dé…nit
Im;n = 2 Z 0 cosm( ) sinn( )d ; (1.14) alors Im;n = m 1 m + nIm 2;n et Im;n = m+nn 1Im;n 2:
Corollaire 1.15.1 Si m et n sont pairs Im;n =coe¤(m; n) I0;0 =ce¤(m; n)
2 ; (en abaissant m et n; de 2 en 2; jusqu’à arriver à 0 et 0):
Sinon Im;n =coe¤(m; n) I1;0 ou bien I1;1; ou bien I0;1; = 0 à chaque fois:
Chapitre 2
Méthode de la moyennisation
2.1
Introduction
La méthode de la moyennisation est une technique de calcul utile. Son idée de base peut être datée de la …n du 18eme siècle, quand en 1788, Lagrange
a formulé le problème des trois corps gravitationnels comme une perturba-tion du problème à deux corps. Aucune preuve rigoureuse de sa validité a été donnée, jusqu’à ce que Fatou a donné la preuve de la validité asympto-tique de la méthode en 1928. Après des recherches systémaasympto-tiques faites par Krylov, Bogoliubov, Mitropolsky etc, dans les années 1930, la méthode de moyennisation devient peu à peu l’une des méthodes classiques de l’analyse des oscillations non linéaires. Elle consiste à donner une relation quantitative entre les solutions d’un système di¤érentiel périodique non autonome et celle de son système di¤érentiel moyenné lequel est autonome.
Dans ce chapitre, nous présentons des méthodes de la moyennisation du pre-mier et second ordre.
2.2
Méthode de Krylov et Bogoliubov
La méthode de Krylov et Bogoliubov est une méthode qui permet de trouver le premier ordre de la solution d’une équation di¤érentielle non linéaire tel qu’un oscillateur linéaire est perturbé par une force extérieure. Cette méthode est connue sous le nom de la méthode de la moyennisation, elle s’applique aux systèmes di¤érentiels de la forme
2.2. MÉTHODE DE KRYLOV ET BOGOLIUBOV
x + x = "f (x; x); (2.1)
où 0 < " << 1:
Pour " = 0; la solution du système di¤érentiel non perturbé est donnée par x0(t) = A0cos(t + 0);
où A0 et 0 sont des constantes arbitraires.
Pour " 6= 0 su¢ samment petit, Krylov et Bogoliubov cherchent une solu-tion exacte du problème perturbé à l’aide de la méthode de Lagrange de la variation des constantes A et :
Alors ils posent la solution de l’équation (2:1) sous la forme 8 < : x(t) = A(t) cos(t + (t)); x(t) = A(t) sin(t + (t)); (2.2)
qui va conduire à la méthode de la variation des constantes A et Posons maintenant y = x dans (2:1); on trouve
y = x + "f (x; y); (2.3) la solution (2:2) devient 8 < : x(t) = A(t) cos(t + (t)); y(t) = A(t) sin(t + (t))
(2.4)
or y = x; d’où
A(t) cos(t + (t)) A(t) (t) sin(t + (t)) = 0: Substituons (2:4) dans (2:3), on aura
A(t) sin(t+ (t)) A(t) (t) cos(t+ (t)) = "f (A(t) cos(t+ (t)); A(t) sin(t+ (t))):
En résolvant les deux dernières équations par rapport à A(t) et (t); nous obtenons
CHAPITRE 2. MÉTHODE DE LA MOYENNISATION 8 > > < > > :
A(t) = " sin(t + (t))f (A(t) cos(t + (t)); A(t) sin(t + (t)));
(t) = A(t)" cos(t + (t))f (A(t) cos(t + (t)); A(t) sin(t + (t))): (2.5) Notons que A(t) et (t) sont proportionnelles à "; ce qui con…rme que A(t) et (t) varient lentement avec le temps pour " su¢ samment petit.
L’approximation de Krylov et Bogoliubov consiste à remplacer A(t) et (t) dans (2:5) par leurs valeurs moyennes sur une période 2 : Ce procédé connu comme méthode de la moyennisation (averaging method).
En posant = t + ;nous aurons 8 > > > > > > < > > > > > > : A = " 2 2 Z 0
sin( )f (A cos( ); A sin( ))d ;
= 2 A"
2
Z
0
cos( )f (A cos( ); A sin( ))d :
(2.6)
Les équations exactes (2:5) sont remplacées par les équations approximatives (2:6): Une fois les intégrales trouvées, nous aurons à résoudre des équations di¤érentielles du 1er ordre pour obtenir A(t) et (t):
Remarque 2.2.1Pour les calculs des intégrales de (2:6), on utilise le lemmes 1:15:1et le corollaire 1:15:1 du chapitre 1:
Exemple 2.2.1Appliquons la méthode de Krylov et Bogoliubov pour trou-ver la solution approximative de l’équation di¤érentielle de Du¢ ng à valeurs
initiales (
x + x + "x3 = 0;
x(0) = a , x(0) = 0; (2.7)
avec a 6= 0; et " su¢ samment petit. L’équation (2:7) est équivalente à l’équa-tion (2:1) avec f (x; x) = x3:
Les formules de (2:2) sont données par 8
< :
x(t) = A(t) cos(t + (t)); x(t) = A(t) sin(t + (t)):
2.2. MÉTHODE DE KRYLOV ET BOGOLIUBOV
En utilisant les conditions initiales de (2:7); nous obtenons A0 = a et 0 = 0: De l’expression (2:6), on a 8 > > > > > > < > > > > > > : A(t) = "A2 3 2 Z 0 sin( ) cos3( )d ; (t) = "A22 2 Z 0 cos4( )d ;
En utilisant le lemme 1.15.1 et le corollaire 1.15.1 du chapitre 1, nous obte-nons 2 Z 0 sin( ) cos3( )d = I3;1 = 0: et 2 Z 0 cos4( )d = I4;0 = 3 4I2;0 = 3 4 1 2I0;0 = 3 4 : D’ici les fonctions A(t) et (t) sont données par
8 < :
A(t) = 0; (t) = 38"A2; ce qui implique que
8 < : A(t) = a; (t) = 3 8"a 2t:
Alors la solution approximative de (2:7); qui est une solution périodique est donnée par
x(t)' a cos((1 + 3 8"a
CHAPITRE 2. MÉTHODE DE LA MOYENNISATION
2.3
Méthode de la moyennisation du premier
ordre
Considérons le problème de Cauchy à valeur initiale suivant
x(t) = "f (t; x) + "2g(t; x; "); x(0) = x0; (2.8)
où x 2 D Rn; D un domaine borné et t 0: On suppose que f (t; x) et
g(t; x; ")sont T -périodiques en t:
Le système moyenné associé au système (2:8) est
y(t) = "f0(y); y(0) = x0; (2.9)
où f0(y) = 1 T T Z 0 f (t; y)dt: (2.10)
Le théorème suivant donne les conditions pour lesquelles les points d’équi-libres du système moyenné (2:9) fournissent des solutions périodiques du système (2:8):
Théorème 2.3.1 Considérons le système (2:8); et supposons que 1: f; g;@f@x;@@x2f2 et
@g
@x sont dé…nies, continues et bornées par une
constante M indépendante de " dans [0; 1) Davec " 2 (0; "0];
2: T indépendant de ";
3:La solution y(t) appartient à D pendant un temps de l’ordre de 1";
Alors
(a) Pendant un temps de l’ordre de 1
" on a que
x(t) y(t) = O("); quand " ! 0:
(b) Si p 2 D est un point d’équilibre du système moyenné (2:9), tel que
det(@f
0
2.3. MÉTHODE DE LA MOYENNISATION DU PREMIER ORDRE
alors, il existe une solution T -périodique x"(t) de (2:8)
telle que x"(t) ! p quand " ! 0:
(c) Si (2:11) est négative, alors la solution périodique x"(t) de
l’équation (2:8) est asymptotiquement stable pour " su¢ samment petit. Si (2:11) est positive, alors elle est instable.
Preuve. Voir le théorème 11:6 de l’article [44]: Exemple 2.3.1 Soit l’équation di¤érentielle
x + x = "(a + 2bx + 3cx2)x; où ac < 0:
Cette équation est équivalente au système di¤érentiel (
x = y;
y = x + "(a + 2bx + 3cx2)y: (2.12)
Le système non perturbé de (2:12) est (
x = y; y = x;
les orbites de ce système sont des cercles dans le plan de phases (xoy): En coordonnées polaires ( x = r cos( ); y = r sin( ); le système (2:12) devient ( r = xx+yyr ; = xy yxr2 ; d’où 8 > < > :
r = "(a + 2brcos( ) + 3cr2cos2( ))rsin2( );
CHAPITRE 2. MÉTHODE DE LA MOYENNISATION Or dr d = dr dt dt d ;
prenons comme une variable indépendante de temps, on obtient l’équation suivante
dr
d = "f ( ; r) + O("
2);
où f ( ; r) est donnée par
f ( ; r) = r(a + 2br cos( ) + 3cr2cos2( )) sin2( ): D’après (2:10), nous obtenons
f0(r) = 1 2
2
Z
0
r(a + 2br cos( ) + 3cr2cos2( )) sin2( )d ;
= 1
8r(4a + 3cr
2);
qui a une seule racine positive donnée par
r = r 4a 3c; ac < 0: Puisque df0 dr(r) = 1 2a 9 8cr 2;
ce qui implique que
df0
dr( r
4a
3c) = a6= 0:
Alors, d’après le théorème 2:3:1; le système (2:12) possède un seul cycle limite d’amplitude q 4a
3c qui bifurque des orbites périodiques du système
non perturbé quand " = 0: Si a < 0 ce cycle limite est stable et si a > 0 il est instable.
2.3. MÉTHODE DE LA MOYENNISATION DU PREMIER ORDRE 8 < : x = y "(a1x + a2x2+ ::::::::anxn); y = x; (2.13)
avec " su¢ samment petit et an 6= 0 a au plus n 12 cycles limites qui
bi-furquent des orbites périodiques du centre linéaire (
x = y ; y = x:
Et il existe des exemples avec exactement n 12 cycles limites.
Preuve En coordonnées polaires ( x = r cos( ); y = r sin( ); le système (2:13) devient 8 > < > : r = "Pnk=1akrkcosk+1( ); = 1 + " sin( )Pnk=1akrk 1cosk( ):
Ce système est équivalent à dr d = " n X k=1 akrkcosk+1( ) + O("2); avec f ( ; r) = n X k=1 akrkcosk+1( ):
CHAPITRE 2. MÉTHODE DE LA MOYENNISATION
D’après l’expression (2:10), la fonction moyennée est donnée par
f0(r) = 1 2 2 Z 0 ( n X k=1 akrkcosk+1( ))d ; = 1 2 n X k=1 akrk 2 Z 0 cosk+1( )d ; = 1 2 n X k=1 k impair akrkbk = p(r); où bk = 2 Z 0
cosk+1( )d 6= 0 si k est impair.
Cherchons les racines positives de f0(r); nous trouvons
f0(r) = 0 =)
n
X
k=1
akrkbk= 0;
ce qui implique que
n
X
k=1
akrkbk = a1b1r + a3b3r3+ :::::::: + anbnrn;
= r(a1b1+ a3b3r2+ :::::::: + anbnrn 1) = 0:
Puisque le polynôme p(r) a au plus n 12 racines positives, et on peut choisir les coe¢ cients ak avec k impaire pour que p(r) a exactement n 12 racines
positives. Alors d’après le théorème 2:3:1, le système (2:13) admet exactement
n 1
2 cycles limites.
2.3. MÉTHODE DE LA MOYENNISATION DU PREMIER ORDRE 8 < : _x = y; _y = x "(jyj 1)y; (2.14)
le système non perturbé de (2:14) est 8 < : x = y; y = x: En coordonnées polaires 8 < : x = r cos( ); y = r sin( ); le système (2:14) s’écrit ( _r = "(jr sin( )j 1)r sin2( );
_ = 1 + " cos( ) sin( )(jr sin( )j + 1);
qui est équivalent à
dr
d = "f (r; ) + O("
2);
où f (r; ) est donnée par
CHAPITRE 2. MÉTHODE DE LA MOYENNISATION
La fonction moyennée (2:10), est donnée par
f0(r) = 1 2 2 Z 0 f (r; ) d ; = r 2 2 Z 0 (jr sin( )j 1) sin2( ) d ; = r 2 0 @Z 0 (r sin( ) 1) sin2( ) d + r 2 2 Z ( r sin( ) 1) sin2( ) d ) 1 A ; = r 2 2 Z 0 (r sin( ) 1) sin2( ) d ; = 1r(4 3r 1 2 ):
Puisque la fonction f0(r)a une seule racine positive r = 38 , de plus dfdr0(38 ) =
1
2:Alors d’après le théorème 2:3:1, le système (2:14) possède un cycle limite
instable d’amplitudes r = 3
8 qui bifurque des orbites périodiques du système
non perturbé quand " = 0.
2.4
Méthode de la moyennisation du second
ordre
Le théorème suivant fournit une approximation du second ordre pour les solutions d’un système di¤érentiel périodique.
Théorème 2.4.1 Considérons les deux problèmes à valeurs initiales
x = "f (t; x) + "2g(t; x) + "3h(t; x; "); x(0) = x0; (2.15)
et
y = "f0(y) + "2f10(y) + "2g0(y); y(0) = x0; (2.16)
où f; g : [0; 1) D ! Rn
2.4. MÉTHODE DE LA MOYENNISATION DU SECOND ORDRE
Rn, les fonctions f; g et h sont T -périodiques en t, et
f1(t; x) = @f @xy 1(t; x) @y1 @x f 0(x); (2.17) où y1(t; x) = t Z 0 [f (s; x) f0(x)]ds + z(x); (2.18)
avec z(x) une fonction de classe C1 telle que la moyenne de y1 est nulle. f0,
f10 et g0 sont les fonctions moyennées de f; f1 et g respectivement, dé…nies
comme f0(y) = 1 T T Z 0 f (t; y)dt: Supposons que
1: @f@x, g et h sont Lipchitziennes en x et toutes ces fonctions sont continues sur leurs domaines de dé…nition ;
2:jh(t; x; ")j est uniformément bornée par une constante M dans [0;M" [ D (0; "0];
3: T est indépendant de " ;
4: y(t)appartient à D pendant un temps de l’ordre 1". Alors
x(t) = y(t) + "y1(t; y(t)) + O("2). pendant un temps de l’ordre 1".
Preuve. Voir le théorème 3:5:1 de l’article [4]:
Corollaire 2.4.1 Si les hypothèses du théorème 2:4:1 sont satisfaites et de plus
f0(y) = 0: Alors
CHAPITRE 2. MÉTHODE DE LA MOYENNISATION
(a) Si p est le point d’équilibre du système moyenné (2:16) tel que @ @y(f 10 (y) + g0(y)) y=p 6= 0; (2.19)
alors, il existe une solution T -périodique x"(t) de l’équation (2:15)
telle que
x"(t)! p quand " ! 0:
(b) Si (2:19) est négative, alors la solution périodique x"(t)de (2:15) est
asymptotiquement stable pour " su¢ samment petit. Si (2:19) est posi--tive, alors cette la solution périodique est instable.
Remarque 2.4.1 1:Si f0(y) = 0; alors en coordonnées polaires x = r cos
et y = r sin ; on obtient que f0(r) = 0; d’où 2 Z 0 @f @r(r; )d = 0: Calculons f10, on trouve f10 = 1 2 2 Z 0 (@f @r(r; s) s Z 0 f (r; )ds)d + 1 2: 2 Z 0 @f @r(r; s)z(r)ds; = 1 2 2 Z 0 (@f @r(r; s) s Z 0 f (r; )d )ds + z(r) 2: 2 Z 0 @f @r(r; s)ds; ce qui implique que
f10 = 1 2: 2 Z 0 (@f @r(r; s) s Z 0 f (r; )ds)d :
2:Pour f0(y) = 0, on note la fonction moyennée de second ordre par A(r) = f10(r) + g0(r):
2.4. MÉTHODE DE LA MOYENNISATION DU SECOND ORDRE 8 < : x = y + "(px2+ qxy) + "2(mx); y = x: (2.20) En coordonnées polaires ( x = r cos ; y = r sin ; le système (2:20); s’écrit 8 > < > :
r = "r3cos2( )(pr cos( ) + qr sin( ) + m");
= 1 "r(p cos2( ) sin( ) + q cos3( ) m cos( )) + "2m cos( ) sin( ):
En divisant r par , on trouve
dr
d = "f (r; ) + "
2g(r; ) + O("2);
où
f (r; ) = r2cos2( )(p cos( ) + q sin( ));
et
g(r; ) = r cos2( )(2pqr2cos4( ) p2r2sin( ) cos3( ) + m2r2sin( ) cos3( ) 2pr2cos2( ) q2r2sin( ) cos( ) + m):
Puisque f0(r) = 0, on passe à l’approximation du second ordre on obtient
g0(r) = 1 2 2 Z 0 g( ; r) d ; = 1 8r(4m pqr 2); et f10(r) = 1 2: 2 Z 0 @f @r(r; s)( s Z 0 f (r; )ds)d = 0:
CHAPITRE 2. MÉTHODE DE LA MOYENNISATION où @f @r(r; s) = 2r cos 2(s)(p cos(s) + q sin(s)); et s Z 0
f (r; )d = 13r2(q + p cos2(s) sin(s) + 2p sin(s) qr2cos3(s)):
Par conséquent, A(r) est donnée par
A(r) = f10(r) + g0(r) = 1
8r(4m r
2pq);
qui a une seule racine positive r = 2qmpq avec pqm > 0, de plus @r@ (A(r))r=2pm pq
= m: Alors d’après le théorème 2:4:1; le système (2:20) possède un seule cycle limite d’amplitude 2qm
pq qui bifurque des orbites périodiques du système non
perturbé quand " = 0: Ce cycle limite est stable pour m < 0, et instable pour m > 0.
Exemple 2.4.2 Considérons le système di¤érentiel suivant 8 < : x = y + (12x2+ 8xy)" + 6x"2; y = x: (2.21) En coordonnées polaires ( x = r cos( ); y = sin( ); le système (2:21) devient 8 > < > :
r = 12rcos2( )"(rcos( ) + 16rsin( ) 12");
= 1 + 12"r sin( ) cos2( ) 6"2sin( ) cos( ) 8"r cos3( ) + 8"r cos( );
2.4. MÉTHODE DE LA MOYENNISATION DU SECOND ORDRE 8 > > > < > > > : dr d = 1 2r
2cos2( )(cos( ) + 16 sin( ))" 1 4r cos
2( )(32 cos4( )r2;
+ 255r2cos3( ) sin( ) + 24 32r2cos2( ) 256r2sin( ) cos( ))"2
+ O("3):
Cette équation est de la forme dr d = "f (r; ) + " 2g(r; ) + O("3); où f (r; ) = 1 2r
2cos2( )(cos( ) + 16 sin( ));
et
g(r; ) = 14r cos2( )(32r2cos4( ) + 255r2cos3( ) sin( ) +24 32r2cos2( ) 256r2sin( ) cos( )):
Calculons f0(r); g0(r) et f10(r);on obtient
f0(r) = 2 Z 0 @f @r(r; )d = 0: g0(r) = 1 2 2 Z 0 g( ; r) d ; = 1 2r(r 2 6); et f10(r) = 1 2: 2 Z 0 @f @r(r; s)( s Z 0 f (r; )ds)d = 0: avec @f @r(r; s) = cos 2(s)r(cos(s) + 16 sin(s));
CHAPITRE 2. MÉTHODE DE LA MOYENNISATION
et
s
Z
0
f (r; )d = 83r2 16r2cos2(s) sin(s) 13r2sin(s) + 83r2cos3( ):
Par conséquent, la fonction moyennée A(r) devient A(r) = f10+ g0(r) = 1
2r(r
2 6):
Il existe une seule racine positive de A(r) donnée par r =p6, avecdrd(A(p6)) = 6 > 0:Alors d’après le théorème 2:4:1; le système (2:21) admet un cycle limite de rayon r =p6 qui est instable.
2.5
Une autre méthode de la moyennisation
du premier ordre
Considérons le système di¤érentiel
x= F0(t; x) + "F1(t; x) + "2F2(t; x; ") ; (2.22)
où " 2 ( "0; "0)pour "0su¢ samment petit. Les fonctions F0; F1 : R ! Rn
et F2 : R ( "0; "0)! Rnsont des fonctions de classe C2, T -périodique
en t et est un ouvert de Rn. Supposons que le système non perturbé
x(t) = F0(t; x) ; (2.23)
a une sous-variété de solutions périodiques. Une de ces solutions est donnée par la théorie de la moyennisation.
Soit x (t; z) la solution du système non perturbé (2:23) telle que x(0; z) = z. La linéarisation du système non perturbé (2:23) le long de la solution x(t; z) s’écrit
y= DxF0(t; x (t; z)) y: (2.24)
Notons par Mz(t) la matrice fondamentale du système di¤érentiel linéaire
(2:24): Supposons qu’il existe un ensemble ouvert V avec V ; tel que pour chaque z 2 V , x(t; z; 0) est T -périodique, où x(t; z; 0) est la solution du
2.5. UNE AUTRE MÉTHODE DE LA MOYENNISATION DU PREMIER ORDRE système non perturbé (2:23); avec x(0; z; 0) = z: L’ensemble V est isochrone pour le système (2:22): Alors, on a le résultat suivant.
Théorème 2.5.1 (P erturbation d0un ensemble isochrone):
Soit V un ensemble ouvert et borné avec V tel que pour chaque z 2 V , la solution x(t; z) est T -périodique, considérons la fonction F : V ! Rn
F (z) = 1 T T Z 0 Mz1(t; z) F1(t; x (t; z)) dt: (2.25)
S’il existe a 2 V avec F(a) = 0 et det dFdz (a) 6= 0, alors il existe une
solution T -périodique (t; ") du système (2; 22) telle que (0; ") ! a quand " ! 0.
Preuve. Voir le corollaire 1 de l’article [4]:
Exemple 2.5.1 Considérons le système di¤érentiel 8 < : x = y; y = x + "(kx cos2t 2 cos3t); (2.26)
où " su¢ samment petit et k est une constante. Ce système peut s’écrire sous la forme (2:22) avec x= x y ; F0(t; x) = y x et F1(t; x) = 0 kx cos2t 2 cos3t : La partie non perturbé du système (2:26) est
(
x = y;
y = x; (2.27)
il correspond à l’oscillateur harmonique simple dont la solution est 8
< :
x(t) = x0cos t + y0sin t;
CHAPITRE 2. MÉTHODE DE LA MOYENNISATION
Nous observons que pour toute condition initiale (x0; y0) 2 R2nf(0; 0)g, la
solution correspondante est 2 -périodique et peut être écrite comme 8
< :
x(t) = r cos(a t); y(t) = r sin(a t); où r > 0 et a est une constantes.
Soit x(t; z; ") la solution du système (2:26) tel que x(0; z; ") = z = (r; a): L’équation du système non perturbé (2:27) le long de la solution périodique x(t; z; 0) est
y= DxF0(t; x (t; z;0)) y:
Soit M (t) la matrice fondamentale de ce système di¤érentiel linéaire, elle s’écrit M (t) = Mz(t) = cos t sin t sin t cos t : D’aprés l’équation (2:25) on a F (z) = 0 @ F1 (r; a) F2(r; a) 1 A = 0 @ 1 8kr sin a 3 8kr cos a 3 4 1 A :
qui a une seule racine pour r0 > 0 donnée par (r0; a0) = (2k; 0) avec k > 0.
Le Jacobien est
det @ (F1;F2)
@ (r; a) (r0;a0) =
3
32k 6= 0:
Alors d’après le théorème 2:5:1, le système (2:26) a une solution unique 2 -périodique x(t; ") qui tend vers la solution -périodique 2kcos tquand " ! 0:
Chapitre 3
La forme des cycles limites
d’une classe des systèmes
di¤ érentiels polynomiaux de
degré 5
3.1
Introduction
Dans ce chapitre, on étudie l’article [48], concernant la forme des cycles li-mites d’une classe des systèmes di¤érentiels polynomiaux de degré 5.
Nous utiliserons la méthode de la moyennisation du second ordre pour étudier la forme globale des cycles limites pour une classe des systèmes di¤érentiels polynomiaux de la forme 8 < : x = P1(x; y) + P5(x; y); y = Q1(x; y) + Q5(x; y); (3.1)
CHAPITRE 3. LA FORME DES CYCLES LIMITES D’UNE CLASSE DES SYSTÈMES DIFFÉRENTIELS POLYNOMIAUX DE DEGRÉ 5
Il est connu que le système (3:1) est équivalent à la forme 8 > > > > > > > > > > > > > > > < > > > > > > > > > > > > > > > : x = x y + ( 1+ 2+ 3+ 4+ 5+ 6)x5+ ( 5 1 3 2 3+ 4 + 3 5+ 5 6)x4y + ( 10 1 2 2+ 2 3+ 2 4 2 5 10 6)x3y2 + ( 10 1 2 2 2 3+ 2 4+ 2 5 10 6)x2y3+ (5 1 3 2 + 3 + 4 3 5+ 5 6)xy4+ ( 1+ 2 3+ 4 5+ 6)y5; y = x + y + ( 1+ 2+ 3+ 4+ 5+ 6)x5+ (5 1 + 3 2+ 3 4 3 5 5 6)x4y + ( 10 1 2 2+ 2 3+ 2 4 2 5 10 6)x3y2 + (10 1+ 2 2+ 2 3 2 4 2 5+ 10 6)x2y3+ (5 1 3 2+ 3 + 4 3 5+ 5 6)xy4+ ( 1 2+ 3 4+ 5 6)y5; (3.2)
où l’origine est un foyer. Plus précisément, nous étudierons la forme globale des cycles limites de la bifurcation de Hopf à l’origine du système (3:2) et aussi la forme globale des cycles limites du système (3:2) qui bifurquent des orbites périodiques du centre linéaire
(
x = y; y = x:
La méthode de la moyennisation donne une relation quantitative entre les solutions d’un système di¤érentiel non-autonome et les solutions de son sys-tème di¤érentiel moyenné, qui est autonome. A…n d’utiliser cette méthode à l’ordre 2, on transforme le système (3:2) en l’équation di¤érentielle d’Abel à l’aide de la transformation de Cherkas.
3.2
Résultats principaux
Nous utilisons l’approximation du second ordre de la méthode de la moyen-nisation pour chercher les solutions périodiques qui bifurquent de l’origine
3.2. RÉSULTATS PRINCIPAUX
du système d’ordre cinq 8 > > > > > > > > > > > > > > > < > > > > > > > > > > > > > > > : x = y + ( 1+ 2+ 3+ 4+ 5+ 6)x5+ ( 5 1 3 2 3+ 4 + 3 5+ 5 6)x4y + ( 10 1 2 2 + 2 3+ 2 4 2 5 10 6)x3y2 + ( 10 1 2 2 2 3+ 2 4+ 2 5 10 6)x2y3+ (5 1 3 2+ 3 + 4 3 5+ 5 6)xy4+ ( 1+ 2 3+ 4 5 + 6)y5+ "2 0x; y = x + ( 1+ 2+ 3+ 4+ 5+ 6)x5+ (5 1+ 3 2 + 3 4 3 5 5 6)x4y + ( 10 1 2 2+ 2 3 + 2 4 2 5 10 6)x3y2 + (10 1+ 2 2+ 2 3 2 4 2 5+ 10 6)x2y3+ (5 1 3 2+ 3 + 4 3 5+ 5 6)xy4+ ( 1 2+ 3 4+ 5 6)y5+ "2 0y; (3.3) en " = 0: Par la même méthode, nous étudions les cycles limites qui bi-furquent des orbites périodiques du centre linéaire x = y; y = x; quand nous le perturbons par des polynômes de degré cinq
8 > > > > > > > > > > > > > > > < > > > > > > > > > > > > > > > : x = y + "[(a1+ a2+ a3+ a4+ a5+ a6)x5+ ( 5b1 3b2 b3+ b4 + 3b5+ 5b6)x4y + ( 10a1 2a2+ 2a3+ 2a4 2a5 10a6)x3y2 + ( 10b1 2b2 2b3+ 2b4+ 2b5 10b6)x2y3+ (5a1 3a2 + a3 + a4 3a5+ 5a6)xy4 + ( b1 + b2 b3+ b4 b5+ b6)y5] + "2 0x; y = x + "[(b1+ b2+ b3+ b4+ b5+ b6)x5+ (5a1+ 3a2 + a3 a4 3a5 5a6)x4y + ( 10b1 2b2+ 2b3+ 2b4 2b5 10b6)x3y2 + (10a1+ 2a2+ 2a3 2a4 2a5 + 10a6)x2y3+ (5b1 3b2+ b3 + b4 3b5+ 5b6)xy4+ (a1 a2+ a3 a4+ a5 a6)y5] + "2 0y: (3.4) Les résultats principaux sont les théorèmes suivants.
Théorème 3.2.1 Considérons le système di¤érentiel (3:3) avec 1 = 85 3
et 0M > 0; où
M = 105 1 1+ 40( 1 3+ 3 1+ 4 1+ 1 4) + 64( 3 3
CHAPITRE 3. LA FORME DES CYCLES LIMITES D’UNE CLASSE DES SYSTÈMES DIFFÉRENTIELS POLYNOMIAUX DE DEGRÉ 5
alors, il existe un cycle limite qui bifurque de l’origine pour " = 0. De plus, pour " > 0 su¢ samment petit, l’expression de ce cycle limite en coordonnées polaires (r; ) est donnée par
r( ; ") = "14 1 4 0 + 1 4" 5 4 5 4 0b( ) + 1 4" 5 4 5 4 0c( ) + 5 16" 9 4 9 4 0b( )c( ) (3.5) + 5 32" 9 4 9 4 0b2( ) 3 32" 9 4 9 4 0c2( ) + O(") 13 4 ; où 0 = 8 r 0 M; et b( ) = (158 1+ 2 4) sin(2 ) + ( 58 1+ 2+ 4) cos(2 ) + ( 1 5) sin(4 ) + ( 14 1+ 5) cos(4 ) + ( 58 1 6) sin(6 ) + (58 1+ 6) cos(6 ) + ( 5 8 1+ 3); c( ) = ( 258 1+ 2+ 3 4) sin(2 ) + (358 1+ 2 3 4) cos(2 ) + ( 54 1+ 2 5) sin(4 ) + (54 1 2 5) cos(4 ) + ( 25 24 1 +53 6) sin(6 ) + ( 2524 1 53 6) cos(6 ): (3.6)
Théorème 3.2.2 Considérons le système di¤érentiel (3:4) avec a1 = 85a3
et 0N > 0; où
N = 105a1b1+ 40(a1b3+ a3b1+ a4b1+ a1b4) + 64(a3b3 + a2b4+ a4b2)
+24(a1b5+ a5b1) 80(a2b1+ a1b2);
alors, il existe un cycle limite, qui bifurque des solutions périodiques du centre linéaire pour " = 0 avec un rayon
0 = 8
r
0
N:
De plus, pour " > 0 su¢ samment petit, l’expression de ce cycle limite en coordonnées polaires (r; ) est donnée par
3.3. TRANSFORMATION D’UN SYSTÈME DIFFÉRENTIEL POLYNÔMIAL EN L’ÉQUATION D’ABEL
r( ; ") = 1 4 0 + 1 4" 5 4 0c( ) + 1 4" 5 4 0b( ) + 5 16 9 4 0" 2b( )c( ) (3.7) + 5 32" 2 94 0b2( ) 3 32" 2 94 0c2( ) + O(")3;
où b( ) et c( ) sont dé…nis comme dans le théorème 3:2:1 en changeant seule-ment i et i par ai et bi, respectivement.
3.3
Transformation d’un système di¤érentiel
polynômial en l’équation d’Abel
Soit la classe des systèmes di¤érentiels polynomiaux planaires de la forme (
x = x y + Pn(x; y);
y = x + y + Qn(x; y);
(3.8)
où Pn et Qn sont des polynômes homogènes de degré n. En utilisant les
coordonnées polaires (r; ), le système (3:8) devient (
r = r + f ( )rn;
= 1 + g( )rn 1; (3.9)
où
f ( ) = cos Pn(cos ; sin ) + sin Qn(cos ; sin );
g( ) = cos Qn(cos ; sin ) + sin Pn(cos ; sin ):
On remarque que f et g sont des polynômes homogènes de degré n + 1 en les variables cos et sin : Il est clair que l’expression du système (3:9) est équivalente à l’équation di¤érentielle
dr
d =
r + f ( )rn
1 + g( )rn 1; (3.10)
dans la région S = f(r; ) : 1 + g( )rn 1 > 0
g : Puisque toute orbite pério-dique autour de l’origine du système (3:9) est dans S; mais ne coupe pas la courbe $ : = 0; (voir l’appendice de Carbonell et Llibre [6]); alors il existe des orbites périodiques de l’équation (3:10):
CHAPITRE 3. LA FORME DES CYCLES LIMITES D’UNE CLASSE DES SYSTÈMES DIFFÉRENTIELS POLYNOMIAUX DE DEGRÉ 5
Soit le changement de variable (r; ) ! ( ; ) dé…ni par
= r
n 1
1 + g( )rn 1; (3.11)
introduit par Cherkas [8]. L’équation (3:10) en la variable devient d
d = [(n 1)g( )( g( ) f ( ))]
3+[(n 1)(f ( ) 2 g( )) g0
( )] 2+(n 1) ; (3.12) c’est une équation di¤érentielle d’Abel. On vient de prouver le lemme suivant. Lemme 3.2.1 La fonction r = r( ) est une solution périodique du système (3:9) autour de l’origine si et seulement si = 1+g( )rrn 1n( )1( ) est une solution
périodique de l’équation di¤érentielle d’Abel (3:12):
3.4
Preuves des Théorèmes
Pour étudier la bifurcation de Hopf, on transforme le système (3:2) en l’équa-tion d’Abel. On utilise les coordonnées polaires x = r cos( ); y = r sin( ), on a le système ( _r = x _x+y _r y; _ = x _y y _x r2 : On obtient 8 < : _r = r + r5a( ); = 1 + r4b( ); (3.13) où a( ) = ( 158 1 2+ 4) sin(2 ) + ( 58 1+ 2+ 4) cos(2 ) + ( 1+ 5) sin(4 ) + ( 14 1+ 5) cos(4 ) + (58 1 + 6) sin(6 ) + (58 1+ 6) cos(6 ) + (58 1+ 3); et
3.4. PREUVES DES THÉORÈMES b( ) = (15 8 1+ 2 4) sin(2 ) + ( 5 8 1+ 2+ 4) cos(2 ) + ( 1 5) sin(4 ) + ( 14 1+ 5) cos(4 ) + ( 58 1 6) sin(6 ) + (58 1+ 6) cos(6 ) + (58 1+ 3);
sont des polynômes de degré 6 par rapport aux variables cos et sin : Ce système est équivalent à l’équation
dr
d =
r + r5a( )
1 + r4b( ) : (3.14)
Soit la transformation de Cherkas
= r
4
1 + b( )r4;
on obtient l’équation di¤érentielle d’Abel suivante d
d = [4 b( )
2
4a( )b( )] 3+ [4a( ) 8 b( ) b0( )] 2+ 4 ; (3.15) qui est équivalente à
d
d = A( )
3+ B( ) 2+ 4 ; (3.16)
où b0( )est la dérivée de b( ) par rapport à ; A( ) et B( ) sont des polynômes trigonométriques de degré 12 et 6 respectivement.
On va étudier les solutions périodiques du système (3:15); et plus particu-lièrement les orbites périodiques entourant l’origine du système d’ordre cinq (3:2). On donnera une bonne estimation asymptotique de la forme du cycle limite ainsi obtenu qui bifurque de l’origine. Pour cela, on utilise la méthode de la moyennisation du second ordre.
Preuve du Théorème 3.2.1. On prenons = 0"2, où " > 0 et su¢
-samment petit, on étudie la bifurcation de Hopf à l’origine du système (3:2). Pour cela, on étudie l’équation di¤érentielle d’Abel associée (3:15).
En posant dans cette équation = ", on obtient l’équation di¤érentielle suivante
d
d = "f ( ; ) + "
2
CHAPITRE 3. LA FORME DES CYCLES LIMITES D’UNE CLASSE DES SYSTÈMES DIFFÉRENTIELS POLYNOMIAUX DE DEGRÉ 5
où
f ( ; ) = (4a( ) b0( )) 2;
g( ; ) = 4( 0 a( )b( ) 2) ;
et
h( ; ; ") = 4( 2 + b( ) ") 0b( ) 2:
Les fonctions f , g et h satisfont toutes les hypothèses du théorème 2:4:1; où la période T = 2 . Posons f0( ) = 1 2 2 Z 0 f ( ; )d ; = 1 2 2 Z 0 (4a( ) b0( )) 2d : on obtient f0( ) = 2 2 (5 1+ 8 3);
= 0 est l’unique racine de f0( ); il n’existe donc pas de cycle limite. A…n
de passer à l’application de la méthode de la moyennisation du second ordre, on pose f0( ) = 0 ce qui implique que 1 = 85 3.
En calculant y1( ; ); f10( ) et g0( ); on obtient y1( ; ) = Z 0 f (s; )ds 1 2 2 Z 0 ( Z 0 f (s; )ds)d = [( 25 8 1+ 2+ 3 4) sin(2 ) + ( 35 8 1+ 2 3 4) cos(2 ) +( 5 4 1+ 2 5) sin(4 ) + ( 5 4 1 2 5) cos(4 ) +(25 24 1+ 5 3 6) sin(6 ) + ( 25 24 1 5 3 6) cos(6 )] 2 ;
3.4. PREUVES DES THÉORÈMES f10( ) = 1 2 2 Z 0 @f @ ( Z 0 f (s; )ds)d = 0; et g0( ) = 1 2 2 Z 0 g( ; ) d ; = 1 2 2 Z 0 4( 0 a( )b( ) 2) d ; = 1 16(64 0 M 2 ) ; où M = 105 1 1 + 40( 1 3+ 3 1+ 4 1+ 1 4) + 64( 3 3 + 2 4+ 4 2) + 24( 1 5+ 5 1) 80( 2 1+ 1 2):
Puisque 0M > 0; la racine de f10( ) + g0( ) est celle de g0( ) et vaut 0 = 8
p 0
M: 0 est le point d’équilibre de l’équation moyennée associée
d d = "
2g0( ):
Alors d’après le théorème 2:4:1; l’équation (3:17) admet une solution pério-dique ( ; ") au voisinage de 0 telle que ( ; ") ! 0 quand " ! 0. On a
l’approximation suivante ( ; ") = 0+ "y1( ; 0) + O(")2: où y1( ; 0) = [( 25 8 1+ 2+ 3 4) sin(2 ) + ( 35 8 1+ 2 3 4) cos(2 ) +( 5 4 1+ 2 5) sin(4 ) + ( 5 4 1 2 5) cos(4 ) +(25 24 1+ 5 3 6) sin(6 ) + ( 25 24 1 5 3 6) cos(6 )] 2 2 0: