MARIE-CLAUDE BOLDUC
HEURISTIQUES POUR LA RÉSOLUTION DE
PROBLÈMES COMPLEXES DE DISTRIBUTION
Thèse présentée
à la Faculté des études supérieures de l’Université Laval
dans le cadre du programme de doctorat en Sciences de l’Administration pour l’obtention du grade de Philosophiæ Doctor (Ph.D.)
OPÉRATIONS ET SYSTÈMES DE DÉCISION FACULTÉ DES SCIENCES DE L’ADMINISTRATION
UNIVERSITÉ LAVAL QUÉBEC
2008
Résumé
De nos jours, l’optimisation des opérations de distribution au sein d’une chaîne logistique passe par la prise de décisions impliquant plusieurs activités simultanément. Cette thèse se concentre sur la résolution de problèmes complexes de distribution. Nous étudions premièrement le cas où un transporteur externe est disponible pour pallier au manque de capacité de la flotte interne. Par la suite nous abordons l’optimisation des tournées en tenant compte du calendrier de production de l’usine et des calendriers de demandes des clients. Ces problématiques se positionnent dans le cadre d’un réseau manufacturier composé d’une usine adjacente à un centre de distribution et d’un ensemble de clients. Les clients, tout dépendamment des contextes, peuvent être des utilisateurs finaux ou des détaillants.
Cette problématique comporte de nombreuses particularités dont, entre autres, la détermination des quantités à livrer, le choix des véhicules à utiliser, la création des tournées, la gestion des stocks du centre de distribution qui est alimenté en fonction du calendrier de production de l’usine et la détermination des dates de livraison en respectant les calendriers de demandes. En regard avec les nombreuses décisions à prendre, la problématique a été divisée en trois grands axes de recherche, chacun se concentrant sur une partie du problème pour ainsi développer des méthodes pouvant être réutilisées par la suite. Ces axes de recherches sont 1) le transport multi-périodes dans un réseau production/distribution, 2) le problème de tournées de véhicules avec flotte limitée hétérogène et transporteur externe et 3) le problème de tournées de véhicules avec livraisons fractionnées et calendriers de production et de demandes.
Le premier axe de recherche se concentre sur la planification des transports lorsque le calendrier de production détermine la disponibilité des divers produits et où les calendriers
de demandes des clients imposent les dates de livraison au plus tard. La planification est complexifiée par la présence d’une flotte privée de véhicules hétérogènes et par l’éloignement de certains clients ce qui implique des déplacements multi-périodes. Des heuristiques de transport en aller-retour ainsi que des heuristiques impliquant des tournées avec plusieurs clients ont été développées.
Le deuxième axe de recherche étudie un problème de tournées de véhicules mono-période et mono-produit où la capacité totale de la flotte privée limitée est insuffisante pour répondre à la demande des clients. Dans un tel contexte, le recours à un transporteur externe est nécessaire afin de combler les besoins manquants de transport. Pour desservir chacun des clients, une décision doit premièrement être prise quant au choix du type de transport utilisé : flotte privée ou transporteur externe. Deuxièmement, pour les clients desservis par la flotte privée limitée, le type de véhicule à utiliser doit être déterminé conjointement avec la planification des tournées. Pour solutionner ce problème, une heuristique rapide et une métaheuristique ont été développées.
Le dernier axe de recherche se concentre sur un problème de tournées de véhicules avec calendriers de production et de demandes. Dans un tel contexte, la disponibilité des divers produits dépend du calendrier de production. De leur côté, les clients, par le biais de leurs calendriers de demandes, fixent les quantités et les dates de livraison au plus tard des produits qu’ils désirent. Les tournées doivent être planifiées en fonction d’une flotte privée homogène et limitée de véhicules et de la présence d’un transporteur externe. Le problème consiste à déterminer pour chaque produit les dates de livraison et les quantités à livrer, en plus de choisir le type de véhicules et de confectionner les tournées de la flotte privée. Une métaheuristique sophistiquée, utilisant une méthode de recherche avec tabous, a été conçue.
Ces axes de recherche font l’objet de quatre articles scientifiques qui composent cette thèse par insertion d’articles. Trois de ces articles sont déjà acceptés pour publication et le quatrième est actuellement en arbitrage.
Abstract
Nowadays, optimizing transportation activities implies making decisions about many activities at the same time. This doctoral dissertation focuses on complex distribution problems, specifically tour optimization taking the factory's production calendar and the customers' demand calendars into account. The manufacturing network studied is composed of a factory, a distribution center (DC) and a set of customers. Depending on the context, the customers may be final users or retailers. The deliveries are made with a private limited fleet of homogenous vehicles owned by the network, supplemented, when it is necessary, by common carriers.
To solve this problem many decisions must be made, such as determining the quantities to deliver; choosing the type of vehicles to use and their routing; deciding how to manage the DC inventory, which is supplied according to the production calendar; and establishing the delivery dates with respect to the demand calendars. Given the number of decisions that need to be made, this complex problem was divided into three main research themes, each one devoted to a part of the problem. These main themes are 1) multi-period routing in a production/distribution network, 2) vehicle routing with a private heterogeneous limited fleet and a common carrier, and 3) vehicle routing with split deliveries and production and demand calendars. The idea was to develop methods that could be reused in future projects.
The first main theme concentrates on route planning and scheduling given a production calendar that governs inventory availability and demand calendars that impose delivery of the requested quantities of each product at the latest dates possible. These planning and scheduling decisions are made more complex by the availability of only a limited private fleet of heterogeneous vehicles for deliveries and by the distance of some customers which
necessitates the use of multi-period routes. Heuristics for round trip transportation and routing with few customers were developed.
The second theme focuses on a mono-period, mono-product vehicle routing problem in which the total capacity of the private limited fleet is insufficient to allow deliveries to all the customers. In this context, a common carrier is needed to supplement the transportation capacity. For each customer, a decision first has to be made as to whether the delivery will be made by the private vehicles or the common carrier. Then, for the deliveries by the private fleet, the type of vehicle and the routing must be determined. To solve this problem, a fast heuristic and a more complicated metaheuristic were developed.
The third theme examines a split vehicle routing problem with production and demand calendars. In this context, inventory availability depends on the production calendar, and the customers impose the product quantities and the latest possible delivery dates via their demand calendars. For deliveries, both a limited private fleet of homogeneous vehicles and a common carrier are available. To solve this problem, first the delivery dates and the product quantities must be determined, and then the type of vehicle and the routes must be determined. To this end, a complex metaheuristic, using a tabu search algorithm, was conceived.
The research for this dissertation led to four scientific papers. Three of these papers have been published, and the fourth is currently submitted for publication.
Remerciements
Au cours des dernières années, de nombreuses personnes ont eu une influence sur cette thèse. Le moment est venu de les remercier.
À Jacques Renaud, pour sa patience, son opinion, ses conseils, ses commentaires, ses critiques, nos nombreuses discussions, les innombrables lectures… Je crois qu’il est impossible de qualifier toutes ces heures. Merci pour tout.
À Fayez Boctor, Gilbert Laporte et Benoit Montreuil, pour leurs conseils, leur travail et leur précieuse collaboration tout au long de l’élaboration de cette thèse.
À André Gascon et Roberto Wolfler Calvo pour avoir si gentillement accepté d’évaluer cette thèse.
À Joëlle, Marc-André, Michel et Didier pour… tellement de raisons! L’important est que vous et moi les connaissons.
À mon arrière-grand-mère Laurette Latulippe Plante (1910-2007)
Seul l'arbre qui a subi les assauts du vent est vraiment vigoureux, car c'est dans cette lutte que ses racines, mises à l'épreuve, se fortifient. - Sénèque
Table des matières
Chapitre 1 Introduction ...1
1.1. Mise en contexte...1
1.2. Définition du problème de distribution à l’étude ...2
Chapitre 2 Revue de la littérature...8
2.1. Problème du voyageur de commerce ...9
2.2. Problème de tournées de véhicules...11
2.3. Problème de tournées de véhicules avec flotte hétérogène ...21
2.4. Problème de tournées de véhicules avec flotte privée et transporteur externe...23
2.5. Problème routage-stocks ...24
2.6. Positionnement des axes de recherche par rapport à la littérature...28
Chapitre 3 Transport multi-périodes dans un réseau de production / distribution ...32
3.1. Présentation du problème ...32
3.2. Méthodologie et contributions...33
3.3. Article publié : Routage synchronisé de produits saisonniers dans un réseau de production / distribution ...34
Chapitre 4 Problème de tournées de véhicules avec flotte privée limitée et transporteur externe (Vehicle Routing Problem with Private fleet and Common carrier – VRPPC) ...58
4.1. Présentation du problème ...59
4.2. Méthodologie et contributions...60
4.3. Article publié : Une heuristique pour le problème de transport et de sélection du transporteur...62
4.4. Article publié : Une métaheuristique de perturbation pour le problème de tournées de véhicules avec flotte privée et transporteur externe ...74
Chapitre 5 Problème de tournées de véhicules avec livraisons fractionnées et calendriers de production et de demandes (Split Vehicle Routing Problem with
Production and Demand Calendard – VRPPDC)...99 5.1. Présentation du problème ...99 5.2. Méthodologie et contributions...100 5.3. Document de travail : Méthode de recherche avec tabous pour le problème de tournées de véhicules avec livraisons fractionnées et calendriers de production et de demandes ...102 Chapitre 6 Conclusion ...128 Références de la thèse ...131
Liste des figures
Figure 2.1 – Recherche dans le voisinage ... 16
Figure 3.1 – Spécifications de l’axe de recherche 1... 33
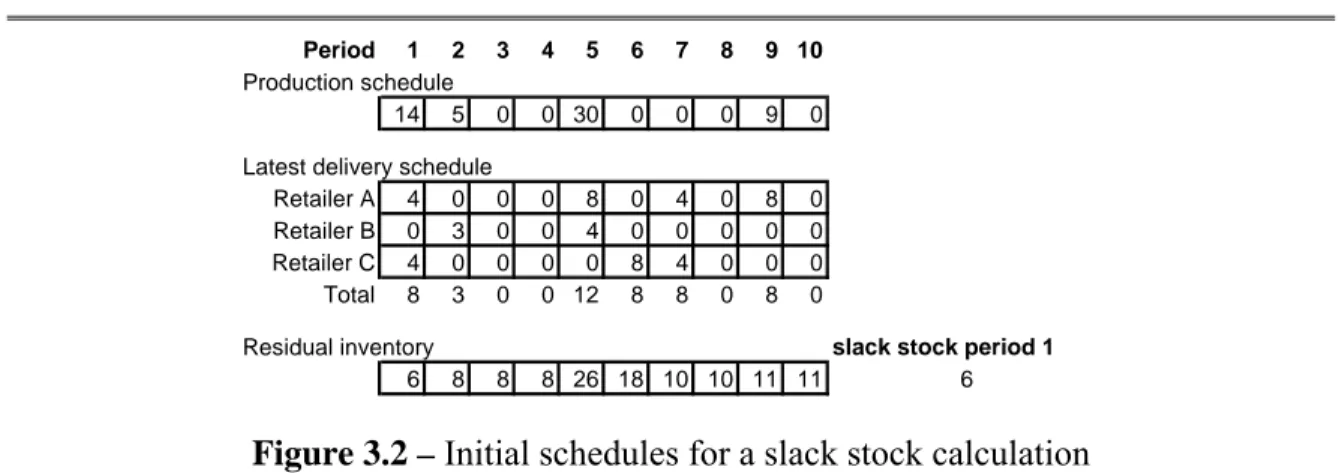
Figure 3.2 – Initial schedules for a slack stock calculation... 44
Figure 3.3 – Possible results for the above slack stock calculation... 45
Figure 4.1 – Spécifications de l’axe de recherche 2... 60
Figure 4.2 – The tested 2-interchange moves... 69
Liste des tableaux
Table 1.1 – Axes de recherche ... 6
Table 2.1 – Comparaison des solutions obtenues avec diverses heuristiques... 21
Table 2.2 – Comparaison du VRP classique avec l’IRP classique... 25
Table 2.3 – Comparaison entre l’axe de recherche 3 et l’IRP classique ... 31
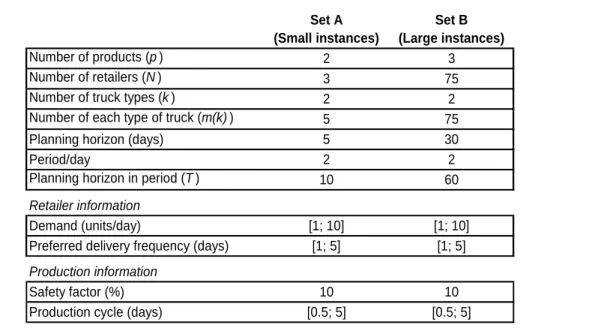
Table 3.1 – The characteristics of the instances ... 49
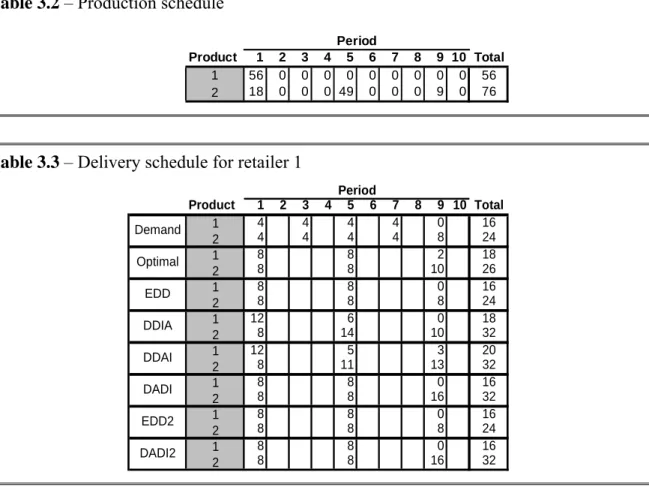
Table 3.2 – Production schedule ... 50
Table 3.3 – Delivery schedule for retailer 1 ... 50
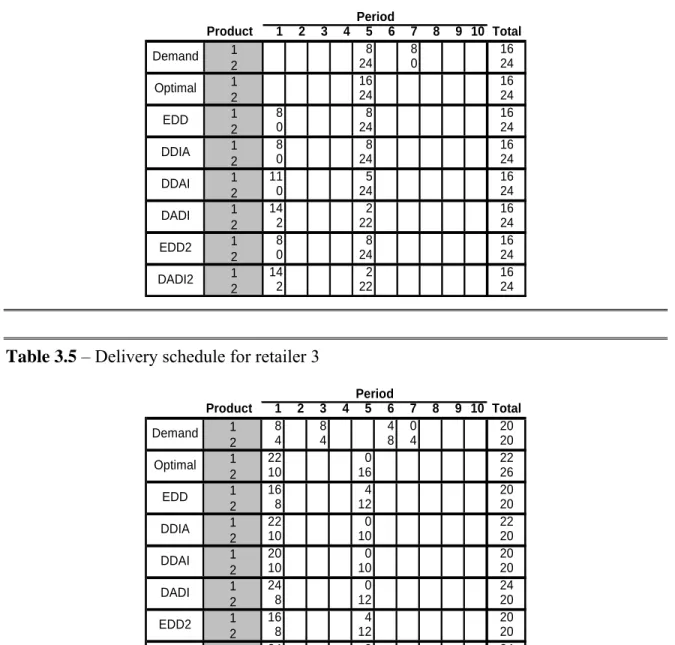
Table 3.4 – Delivery schedule for retailer 2 ... 51
Table 3.5 – Delivery schedule for retailer 3 ... 51
Table 3.6 – Inventory levels ... 52
Table 3.7 – Results for set A instances... 54
Table 3.8 – Results for set B instances... 55
Table 4.1 – Solution values and percentage deviation from the optimum ... 70
Table 4.2 – Solution details... 71
Table 4.3 – Data for new problems ... 73
Table 4.4 – 25 possible moves for the restricted 2-interchange procedure ... 82
Table 4.5 – Characteristics of instances with homogeneous limited fleet ... 86
Table 4.6 – Characteristics of the instances with heterogeneous limited fleet... 87
Table 4.7 – Results of the randomized savings construction procedure ... 90
Table 4.8 – Comparison between inter-route interchange procedures ... 91
Table 4.9 – Results of the switch perturbation procedure in function of β and τ... 92
Table 4.10 – Results of the RIP metaheuristic in function of the number of restarts γ... 93
Table 4.11 – Results of small heterogeneous instances ... 94
Table 4.13 – Global results for instances with heterogeneous limited fleet... 96
Table 5.1 – Notation used in the tabu search algorithm ... 111
Table 5.2 – Some instance characteristics... 119
Table 5.3 – Best known solutions... 121
Table 5.4 – Results for the initial feasible solution and the improvement phase heuristics ... 122
Table 5.5 – Comparison of the neighbor reduction strategies for SRITabu with 500 iterations ... 122
Table 5.6 – Results of the SRITabu heuristic with solution procedure A... 124
1.
Chapitre 1
Introduction
1.1. Mise en contexte
La chaîne logistique est composée de nombreuses activités, dont entre autres l’approvisionnement, la production, la gestion des stocks et le transport. Pendant plusieurs années, la recherche en logistique a eu pour objectif d’optimiser individuellement ces activités. Cette optimisation a permis d’éliminer de nombreuses pertes de temps en plus d’améliorer grandement les façons de faire. Quoiqu’ayant généré des avantages non dédaignables, cette optimisation individuelle est maintenant presque à son maximum considérant l’état actuel des connaissances. Que ce soit en approvisionnement, en production ou en transport, le développement de nouvelles méthodes pour l’optimisation individuelle d’un élément précis a peu de chances de générer de nouvelles sources majeures de profits.
Les développements technologiques des dernières années rendent maintenant accessibles certaines approches qui ne pouvaient auparavant être imaginées qu’en théorie. Dès lors, la transition de certaines idées de la théorie vers leurs applications pratiques implique un approfondissement des bases conceptuelles.
Cette thèse s'aligne dans les nouveaux courants qui visent à optimiser plusieurs activités de la chaîne logistique. Ces nouveaux problèmes complexes sont observés dans plusieurs
chaînes logistiques réelles. Ils sont, à notre avis, le fruit de la croissance de la technologie, de la compétition et de la mondialisation qui font qu’une chaîne logistique se doit d’ouvrir ses horizons et changer ses façons de faire afin de demeurer concurrentielle.
1.2. Définition du problème de distribution à l’étude
Notre problématique aborde la détermination du plan de distribution (gestion des stocks et décisions de transport) dans un réseau manufacturier composé d’une usine, d’un centre de distribution et de clients.
Plus spécifiquement, le réseau étudié fonctionne comme suit. Une usine fabrique une vaste gamme de produits. Le centre de distribution adjacent à l’usine entrepose les produits finis qu’il vend aux clients, i.e. des utilisateurs finaux ou des détaillants. Ce centre est donc le point de gestion des produits dans le réseau. Il permet d’alimenter les clients répartis sur un territoire géographique donné.
Les clients sont indépendants et entretiennent une relation acheteur/vendeur avec le centre de distribution. Avant la saison des ventes, chaque client doit déposer la liste de ses commandes à l’usine. Pour un client, ce calendrier de demandes devient une entente contractuelle qui fixe les quantités souhaitées de chacun des produits ainsi que les dates où il désire les recevoir. L’usine se base sur ces ententes pour concevoir son calendrier de production que nous supposons déterminé et fixé au début du processus décisionnel. C’est à partir de ce dernier calendrier et en considérant les calendriers de demandes des clients que le plan de distribution peut être établi. Les aspects entourant la conception globale du plan de distribution sont au cœur de cette thèse.
La distribution incorpore la gestion des stocks au centre de distribution et l’ensemble des décisions relatives à la planification des transports sur plusieurs périodes. Dans notre contexte, la gestion des stocks consiste à décider du moment où les produits quitteront le centre de distribution. Le niveau des stocks du centre de distribution, qui est fonction du calendrier de production et des livraisons planifiées, doit être suivi sur une base
quotidienne. Les coûts de stockage dépendent des dates de livraison puisque le transfert de propriété se fait lors de la livraison des marchandises. Bien qu’il doive respecter les dates au plus tard fixées par les clients, le centre de distribution se garde plein pouvoir pour devancer certaines livraisons. Considérant la disponibilité des produits et la localisation géographique des clients, il est possible qu’un même client nécessite de nombreuses livraisons. Pour la planification des transports, le centre de distribution possède une flotte privée limitée de véhicules hétérogènes en plus de pouvoir recourir aux services d’un transporteur externe. La demande des clients et la capacité des véhicules sont mesurées en termes d’unités de produits. Dans le cas où les tournées peuvent être accomplies en une période ou moins, un véhicule ne peut faire qu’une tournée par période. Toutefois, dans certains cas, les tournées s’échelonnent sur plusieurs périodes de travail. Dès lors, les véhicules sont disponibles pour une nouvelle assignation une fois de retour au dépôt.
1.2.1. Objectif
Le centre de distribution est donc le concepteur du plan de distribution. Pour ce faire, il doit répondre aux questions suivantes :
• À chacune des périodes et pour chacun des produits, quelles quantités doivent être livrées en fonction des disponibilités en stock ?
• Quel est l’ordre de priorité dans le traitement des demandes des clients ?
• Quel type de transport utiliser ? Dans le cas de la flotte privée, quels types de véhicules utiliser ?
• Dans quel ordre seront visités les clients desservis par la flotte privée ?
Cette recherche se concentre donc sur les décisions de transport en fonction des mouvements de stocks déterminés par la production et la demande des clients. Plus spécifiquement, au cours des divers chapitres, notre objectif sera de minimiser :
1) les coûts de transport de la flotte privée (coûts fixes et variables); 2) les coûts chargés du transporteur externe;
1.2.2. Hypothèses
Cette section permet de consolider les hypothèses liées à la problématique globale. Hypothèses liées à l’usine :
• Le calendrier de production est connu et fixé;
• Le calendrier de production est réalisable, i.e. il assure que tous les produits seront disponibles à temps pour répondre à la demande des clients.
Hypothèses liées au centre de distribution :
• Le centre de distribution est considéré adjacent à l’usine. Il n’y a aucun délai de livraison entre les deux. Dès qu’un produit est fabriqué, il est entreposé et considéré comme disponible pour être expédié;
• Les coûts de stockage de chacun des produits sont connus et imputés au centre de distribution jusqu’au moment où ils sont embarqués dans les camions pour livraison finale aux clients.
Hypothèses liées aux clients :
• Les clients sont indépendants;
• Chacun possède une capacité de stockage suffisante pour recevoir les produits en tout temps;
• Chaque client doit recevoir ses produits commandés au plus tard aux dates auxquelles il les a demandés;
• Un client peut recevoir une ou plusieurs livraisons. Hypothèses liées aux véhicules de la flotte privée :
• La flotte de véhicules est hétérogène et limitée; • La capacité des véhicules est connue;
• Les coûts fixes et variables liés à l’utilisation des véhicules sont connus;
• Les véhicules ont tous la même vitesse moyenne de déplacement et elle est connue; • Une tournée peut durer une ou plusieurs périodes.
1.3. Objectif de la thèse
L’objectif principal de cette thèse est d’étudier, de définir et de modéliser différentes versions de problèmes de transport et de gestion des stocks où des contraintes au niveau de la disponibilité des produits et de la demande des clients sont imposées. Ces décisions de transport et de stockage seront considérées conjointement afin d’utiliser le plus efficacement possible les ressources de transport disponibles, de minimiser les coûts et de répondre adéquatement aux besoins du réseau.
Pour résoudre ces problèmes complexes de distribution, nous entendons proposer des approches qui offrent un niveau de performance supérieure aux méthodes disponibles dans la littérature. Lorsque de telles bases de comparaison n'existent pas, nous entendons développer des ensembles de problèmes-tests qui pourront être utilisés dans l'avenir pour stimuler la recherche dans ce domaine.
1.4. Organisation de la thèse
Réussir à prendre les décisions les plus avantageuses en considérant toutes ces particularités est un défi fort complexe. Compte tenu des nombreuses caractéristiques de la problématique abordée, divers axes de recherche permettant de concentrer nos efforts sur des particularités précises ont été élaborés.
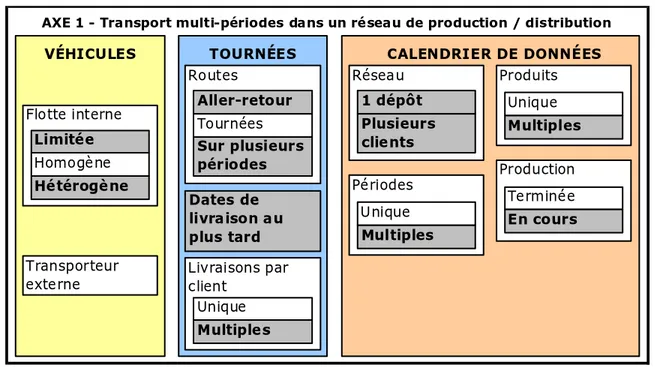
La Table 1.1 présente les divers axes de recherche de cette thèse et leurs principales caractéristiques. L’axe de recherche 1 traite de la gestion du transport et des stocks dans un réseau de distribution multi-périodes. L’axe de recherche 2 se concentre sur la gestion d’une flotte hétérogène privée limitée avec transporteur externe. Finalement, l’axe de recherche 3 étudie le problème global de distribution avec tournées, transporteur externe, calendriers de production et de demandes, et ce, dans un contexte produits et multi-périodes. Puisque ce problème ne peut être résolu de façon optimale, en raison du grand
nombre de variables entières et binaires impliquées, le défi est d’en venir à trouver une méthode efficace et rapide permettant d’obtenir des solutions de qualité.
Table 1.1 – Axes de recherche
AXE 1 AXE 2 AXE 3
Transport multi-périodes dans un réseau de production /
distribution
Tournées avec flotte interne et transporteur externe
Tournées avec livraisons fractionnées et calendriers de production et de demandes FLOTTE PRIVÉE Limitée X X X Homogène X Hétérogène X X TRANSPORT EXTERNE X X ROUTES Aller-retour X Tournées mono-période X X Tournées multi-périodes X
LIVRAISONS PAR CLIENT
Unique X Multiples X X PÉRIODES Une seule X Plusieurs X X PRODUITS Un seul X Plusieurs X X PRODUCTION Terminée X En cours X X DEMANDES
Spécification des dates
de livraison au plus tard X X
Cette thèse s’articule en six chapitres. Le premier est introductif et expose le problème. Le second présente une revue de la littérature sur les divers thèmes reliés à notre problématique. Le troisième chapitre nommé « Le transport multi-périodes dans un réseau
production / distribution » aborde l’axe de recherche 1 et présente l’article qui a été publié
dans le Central European Journal of Operations Research (CEJOR, 14, 2, 2006, 209-228). Le quatrième chapitre intitulé « Le problème de tournées de véhicules avec flotte limitée
hétérogène et transporteur externe » traite du deuxième axe de recherche et présente deux
articles, l’un publié dans l’European Journal of Operational Research (EJOR, 183, 2007, 926-932) et l’autre dans le Journal of Operations Research Society (JORS, 59, 2008, 776– 787). Le cinquième chapitre étudie l'axe de recherche 3 et s'intitule « Le problème de
tournées de véhicules avec livraisons fractionnées et calendriers de production et de demandes ». L’article « A Tabu search heuristic for the split delivery vehicle routing
problem with production and demand calendars » est soumis pour publication à la revue Computers & Operations Research. Le dernier chapitre présente nos conclusions et les
2.
Chapitre 2
Revue de la littérature
Ce chapitre a pour objectif de présenter les principaux éléments de la littérature scientifique en transport qui ont servi d’assises à nos travaux. Cette revue fait dans un premier temps un survol de la littérature existante puis positionne nos divers axes de recherche par rapport à celle-ci.
La littérature scientifique traitant des problèmes de tournées de véhicules est très prolifique. Une revue de la littérature détaillée sur le sujet étant à exclure, nous allons nous concentrer sur les points principaux en lien avec la problématique abordée dans cette thèse. Pour ce faire, la littérature sera subdivisée en cinq catégories : le problème du voyageur de commerce (Traveling Salesman Problem – TSP), le problème classique de tournées de véhicules (Vehicle Routing Problem – VRP), le problème de tournées de véhicules avec flotte hétérogène (Heterogeneous fleet Vehicle Routing Problem – HVRP), le problème de tournées de véhicules avec flotte privée et transporteur externe (Vehicle Routing Problem
with Private fleet and Common carrier – VRPPC) et le problème routage-stocks (Inventory Routing Problem – IRP). Ces thèmes sont abordés dans chacune des sections suivantes.
2.1. Problème du voyageur de commerce
Le problème du voyageur de commerce (Traveling Salesman Problem – TSP) a été soulevé pour la toute première fois par Euler (1736). Depuis, il a été si largement étudié dans la littérature que déjà en 1985, Lawler et al. répertoriaient près de 600 références. Nous ferons un bref survol de la littérature sur le TSP puisque ce dernier est la pierre angulaire de tout problème de tournées.
Le problème du voyageur de commerce consiste à minimiser la distance totale du cycle (graphe non orienté) ou du circuit (graphe orienté) permettant de visiter chacun des nœuds (clients) une et une seule fois. Le problème est modélisé par un graphe G(V,A) où
{
v vn}
V = 1,..., est l’ensemble des n sommets et A=
{
( )
i,j :i, j∈V,i≠ j}
est l’ensembledes arcs (graphe orienté). C=
( )
cij est la matrice de distances (ou de coûts) associée à A .C peut être symétrique
(
cij =cji,∀i,j∈V)
ou asymétrique(
∃i,j∈V |cij ≠cji)
, selon le casétudié. Dans le cas où C est symétrique, A=
{
( )
i j, : ,i j∈V i, < j}
et représentel’ensemble des arêtes (graphe non orienté). De plus, C satisfait l’inégalité du triangle si et
seulement si
(
cij +cjk ≥cik,∀i,j,k∈V)
. Pour les problèmes Euclidiens, V est un ensemblede points dans \ et 2
ij
c est la mesure directe pour passer du point i au point j
(similairement présenté par Laporte, 1992a).
Afin de solutionner le problème de façon exacte, Dantzig, Fulkerson & Johnson (1954) furent parmi les premiers à le modéliser. Ils ont défini x comme étant une variable binaire ij
dont la valeur est 1 lorsque le client j est visité immédiatement après le client i . Ils ont formulé le problème comme suit :
Minimise ij ij i j c x ≠
∑
(1) Sujet à 1 1 n ij j x = =∑
(
i∈{
1,...,n}
)
(2) 1 1 n ij i x = =∑
(
j∈{
1,...,n}
)
(3), 1 n ij i j S x S ∈ ≤ −
∑
, S⊂V, 2≤ S ≤ −n 2 (4){ }
0,1 ij x ∈(
i j, ∈{
1,...,n i}
, ≠ j)
(5)L’objectif est de minimiser le coût de la tournée. Les contraintes (2) et (3) assurent qu’il y a une arrivée et un départ chez chacun des clients. Les contraintes (4) éliminent les sous-tours possibles dans la tournée, i.e. la tournée devra obligatoirement débuter et se terminer au dépôt; S étant le nombre de sommets inclus dans un sous-tour potentiel composé des
clients de l’ensemble S. Enfin, le respect des variables binaires est assuré par la contrainte
(5).
Miller, Tucker & Zemlin (1960) ont réécrit la contrainte d’élimination des sous-tours (4). Cette formulation, présentée ci-dessous, permet de grandement réduire le nombre de contraintes de sous-tours nécessaires mais demande l’ajout de variables continues.
(
1)
2i j ij
u − +u n− x ≤ −n
(
i j, ∈{
2,...,n i}
, ≠ j)
(6)1≤ ≤ − ui n 1
(
i∈{
2,...,n}
)
(7)Cette modélisation, bien que plus compacte, n’est pas tellement plus efficace. Il est possible d’utiliser ces formulations seulement pour des petits problèmes. La multitude de tours possibles rend ce problème complexe et tous les évaluer demanderait un temps considérable. Une étude sur la complexité est présentée par Laporte (1992a).
Pour tenter de solutionner ce problème de façon exacte, de nombreux algorithmes ont été développés. Citons entre autre l’utilisation de théories polyédrales, de génération de coupes (branch-and-cut), d’évaluation progressive (branch-and-bound) et de génération de colonnes. Autant le problème symétrique qu’asymétrique ont été étudiés, ce dernier apportant un défi supplémentaire lié au respect du sens des circuits. Applegate et al. (2007) présentent une méthode de génération de coupes particulièrement efficace appelée tentative
branching. Cette méthode utilise le strong branching pour sélectionner plusieurs candidats
sur chacun desquels une étape de branchement est tentée en plus d’appliquer une version restreinte des plans de coupes. Rappelons que les méthodes traditionnelles de génération de coupes n’évaluent qu’un candidat à la fois. Leurs résultats démontrent que le fait d’évaluer plusieurs candidats en même temps permet de réduire considérablement le nombre de
nœuds nécessaires à la recherche (i.e. la taille des arbres), ce qui implicitement permet de réduire grandement les temps de résolution, soit de l’ordre de 80% dans l’exemple présenté. De plus, en élargissant le nombre de candidats, les auteurs ont démontré que l’arbre pouvait être plus facilement amélioré grâce à une recherche plus intensive des bonnes structures de branchement. Le lecteur davantage intéressé par les méthodes exactes peut se référer aux livres d’Applegate et al. (2007), de Gutin & Punnen (2002) et de Lawler et al. (1985), entièrement consacrés au voyageur de commerce.
Quoique permettant d’obtenir de bons résultats, les méthodes exactes ont toutefois leurs limites en termes de rapidité d’obtention de la solution. De nombreux chercheurs ont donc tenté d’obtenir des solutions par d’autres moyens. Au-delà des heuristiques simples de construction qui ont été développées, telles que l’insertion la moins coûteuse ou le plus proche voisin (Rosenkrantz, Stearns & Lewis II, 1977) qui ne donnent pas de très bons résultats, plusieurs recherches ont été faites sur le développement d’heuristiques d’amélioration. Parmi elles, le r-opt de Lin (1965), l’heuristique de Lin & Kernighan (1973) reprise par Helsgaun (2000) et par Applegate, Cook & Rohe (2003) dans une version dites « enchaînée », l’Or-opt (Or, 1976; Babin, Deneault & Laporte, 2007) et le 4-opt* (Renaud, Boctor & Laporte, 1996a). De nombreuses heuristiques hybrides ont également été développées, dont GENIUS (Gendreau, Hertz & Laporte, 1992), des réseaux de neurones et des algorithmes de fourmis, pour ne nommer que celles-là. Ces deux derniers types d’heuristiques sont habituellement classés parmi les métaheuristiques et elles font l’objet d’une explication plus détaillée dans la section suivante. Il est possible d’affirmer, sans se tromper, que la méthode de Helsgaun (2000), disponible sur Internet1, est actuellement la plus performante.
2.2. Problème de tournées de véhicules
En 1995, la revue bibliographique de Laporte & Osman rapportait quelques 500 références sur le problème de tournées de véhicules (Vehicle Routing Problem – VRP). Plus
récemment, le livre de Toth & Vigo (2002) fait un tour d’horizon des problèmes de tournées et l’article de Laporte (2007) se concentre sur le VRP. Le VRP est un problème de conception de routes. Il est défini sur un graphe G(V,A) où V =
{
v0,...,vn}
est l’ensembledes n+1 sommets (v0 est le dépôt et
{
v ,...,1 vn}
est l’ensemble des clients) et( )
{
i j i j V i j}
A= , : , ∈ , ≠ est l’ensemble des arcs (graphe orienté). C=
( )
cij est la matrice dedistances (ou de coûts) associée à A . Tout dépendamment du cas étudié, C peut être
symétrique
(
cij =cji,∀i,j∈V)
ou asymétrique(
∃i,j∈V|cij ≠cji)
. Dans le cas où C estsymétrique, A=
{
( )
i j, : ,i j∈V i, < j}
représente l’ensemble des arêtes (graphe nonorienté). De plus, C satisfait l’inégalité du triangle si et seulement si
(
cij +cjk ≥cik,∀i,j,k∈V)
. Pour les problèmes Euclidiens, V est un ensemble de pointsdans \ et 2
ij
c et t sont respectivement la mesure directe du coût et du temps pour passer ij
du point i au point j .
Contrairement au TSP, la particularité du VRP est qu’il implique plusieurs tournées débutant et se terminant au dépôt, soit le nœud 0 (Laporte, 1992b). Au dépôt est basée une flotte de véhicules k=
{
1,...,m}
de capacité Q (le VRP classique suppose que les véhiculessont identiques et que m est non borné) qui permettront de répondre à la demande q de i
chacun des clients i . Le VRP consiste donc à concevoir un ensemble de routes au moindre coût pour satisfaire la demande des clients tout en respectant la capacité des véhicules et la durée totale maximale D pour chacune des routes (Cordeau et al. 2005).
Pour solutionner ce problème, de nombreuses formulations mathématiques ont été développées, passant de la formulation par flux à la formulation par ensemble de partitionnement; voir Laporte (2007) pour plus de détails. Toutefois, afin de bien différencier la formulation du TSP et de celle du VRP, nous présentons ici une formulation similaire à celle présentée dans la section précédente, i.e. où x devient ij x soit une ijk
variable binaire égale à 1 si le client j est visité immédiatement après le client i avec le véhicule k. Le VRP se modélise comme suit :
Minimise 0 0 n n ij ijk i j j i c x = = ≠
∑∑
(8) Sujet à 0 0 n n hjk ihk j i j h i h x x = = ≠ ≠ =∑
∑
(
h∈{
0,...,n}
;∀k)
(9) 1 1 1 m n ijk k j x = = =∑∑
( )
∀i (10) 0 1 1 m n jk k j x m = = ≤∑∑
(11) 0 1 n n j jik i j j i q x Q = = ≠ ≤∑∑
( )
∀k (12) 0 0 n n ij ijk i j j i t x D = = ≠ ≤∑∑
( )
∀k (13)(
1)
2 ik jk ijk u −u + n− x ≤ −n(
i j, ∈{
2,...,n i}
, ≠ j)
(14){ }
0,1 ijk x ∈(
i j, ∈{
0,...,n i}
, ≠ j k,)
(15) 0 ik u ≥(
i∈{
1,...,n k}
, .)
(16)Notez que la contrainte classique d’élimination des sous-tours (4), présentée dans la section précédente, pourrait être utilisée au lieu des contraintes (14) et (16). Plus récemment, Kara, Laporte & Bektas (2004) ont démontré que la contrainte d’élimination des sous-tours (14) pouvait être renforcée en la réécrivant comme suit :
(
)
ik jk ijk i j jik j
u −u +Qx + Q q− −q x ≤ − Q q
(
i j, ∈{
1,...,n i}
, ≠ j k,)
. (17)Ce problème est plus complexe que le TSP, puisqu’il implique également la gestion des véhicules. Sa résolution optimale est donc quasi impensable pour des problèmes de taille raisonnable. Pour la résolution de ce problème, deux types de méthodes exactes ont surtout été développées : la programmation dynamique et la programmation linéaire (cette dernière intégrant la séparation et l’évaluation progressive – branch-and-bound, la génération de colonnes et la génération de coupes – branch-and-cut). Les algorithmes exacts les plus performants à ce jour permettent de résoudre sur une base régulière des problèmes d’au plus 135 nœuds (Fukasawa et al. 2006; Baldacci, Christofides & Mingozzi, 2008). Des revues de la littérature sur les méthodes exactes sont présentées dans Laporte & Nobert (1987), Laporte (2007) et Baldacci, Toth & Vigo (2007).
Pour en arriver à solutionner de plus gros problèmes ou tout simplement pour trouver des solutions plus rapidement que les méthodes exactes, des méthodes heuristiques ont été développées. Les heuristiques peuvent inclure une ou plusieurs de ces composants : la construction d’une solution initiale, les procédures d’amélioration et les métaheuristiques, qui incluent elles-mêmes des mécanismes de recherche locale, des mécanismes de population et des mécanismes d’apprentissage (Cordeau et al. 2005 et Laporte 2007).
2.2.1. Construction d’une solution initiale
Les heuristiques utilisées pour la construction d’une solution initiale sont habituellement simples et rapides, mais procurent des résultats plus ou moins éloignés de la solution optimale. La résolution de ces heuristiques est souvent descendante, i.e. elle suppose que le voisinage est parcouru en conservant, au fur et à mesure, une meilleure solution que la solution précédente, et ce, jusqu’à ce qu’aucun gain ne soit possible.
De nombreuses heuristiques construisant une solution initiale ont été développées. L’algorithme d’économies (savings algorithms), originalement présenté par Clarke & Wright (1964), est une méthode classique qui sélectionne à chaque itération la meilleure économie
(
sij =ci0+c0j−cij, , ,∀i j i≠ j)
et fusionne les tournées associées. De nombreuses versions améliorées de cet algorithme ont été développées (voir Laporte & Semet 2002), dont celles de Gaskell (1967), Yellow (1970), Altinel & Öncan (2005) et Girard, Renaud & Boctor (2005). Dans une autre catégorie, les algorithmes de balayage (sweep algorithms), tels que celui de Gillett & Miller (1974), consistent à construire les tournées en balayant les clients un à un, ceci en utilisant le dépôt comme point de rotation. Les algorithmes par pétales (petal algorithms) sont une extension des algorithmes de balayage qui enregistrent toutes les routes pour les sélectionner ultérieurement (voir Foster & Ryan, 1976; Ryan, Hjorring & Glover, 1993; Renaud, Boctor & Laporte, 1996b). Enfin, les algorithmescluster-first, route-second solutionnent le VRP en le traitant d’abord comme un problème
d’affectation généralisée (Generalized Assignment Problem – GAP) suivi de TSP individuels, voir entre autre Fisher & Jaikumar (1981).
2.2.2. Procédures d’amélioration
Les procédures d’amélioration ont pour objectif de corriger les tournées initialement créées. En considérant chacune des routes du VRP individuellement, il est possible d’appliquer les heuristiques d’amélioration développées pour le TSP. Au niveau du VRP, la procédure d’amélioration la plus connue est sans aucun doute la méthode d’échanges-λ (λ-interchange), développée par Osman (1993), qui consiste à tester toutes les combinaisons d’échanges d’au plus λ nœuds appartenant à une première route avec toutes celles d’au plus λ nœuds appartenant à une seconde route. Depuis, des procédures plus complexes impliquant également plusieurs routes ont été développées, telles que les échanges cycliques de Thompson & Psaraftis (1993), les chaînes d’éjection (Xu & Kelly, 1996; Rego & Roucairol, 1996) et les schémas d’arcs d’échanges (Kinderwater & Savelsbergh, 1997) pour ne nommer que celles-ci. Le lecteur intéressé par ces procédures peut également consulter Cordeau et al. (2005) et Laporte (2007) pour plus de détails.
2.2.3. Métaheuristiques
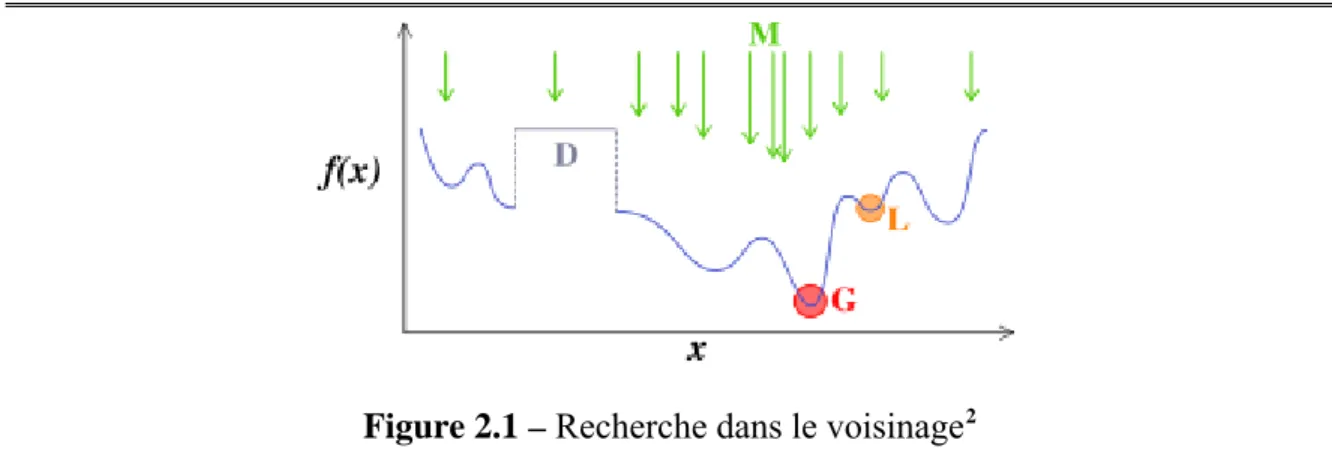
Compte tenu de la faiblesse en termes de qualité de solutions des heuristiques classiques (près de 2 à 3% de l’optimum), des métaheuristiques, i.e. des heuristiques utilisant des méthodes évoluées de recherche dans le voisinage, ont été développées. Telle que présentée dans la Figure 2.1, une meilleure recherche dans le voisinage peut permettre d’évaluer de nombreuses solutions (M), donc un plus grand nombre d’optimums locaux (L), ce qui peut augmenter la probabilité d’atteindre l’optimum global (G) même pour un problème incluant des discontinuités (D). Les métaheuristiques permettent de résoudre des problèmes plus efficacement que les heuristiques classiques de descente en termes de qualité de solutions, puisque ces dernières s’arrêtent dès qu’elles ont atteint un optimum local.
Figure 2.1 – Recherche dans le voisinage2
Les métaheuristiques permettent d’évaluer certaines possibilités délaissées par les autres méthodes en acceptant de considérer des solutions moins bonnes et parfois même non réalisables. La particularité de chacune des métaheuristiques développées se situe dans la méthode de recherche employée et dans la gestion des solutions rencontrées. Selon le cas, elles peuvent nécessiter de nombreux paramétrages. Cette plus grande recherche dans le voisinage nécessite par contre un temps de résolution beaucoup plus grand que les heuristiques classiques. Les sections qui suivent présentent quelques-unes de ces méthodes de recherche.
2.2.3.1. Mécanismes de recherche locale
Un mécanisme de recherche locale commence avec une solution, puis se déplace d’une solution à l’autre en parcourant un voisinage. Le voisinage est composé de toutes les solutions qu’il est possible d’atteindre en appliquant une structure d’échange donnée. L’objectif d’un mécanisme de recherche locale est d’en venir à obtenir une solution de bonne qualité en parcourant qu’une partie des voisins existants, et ce, le plus efficacement possible.
De nombreux mécanismes de recherche locale ont été développés au cours des dernières années. Parmi eux figurent le recuit simulé (simulated annealing – SA), le recuit déterministe (deterministic annealing – DA), la méthode de recherche avec tabous (tabu
search – TS), les algorithmes de recherche dans de très grands voisinages (very large neighborhood search) et l’algorithme des attributs basé sur le grimpeur de colline
(attribute based hill climber – ABHC).
Le recuit simulé est une heuristique où, à partir d’une solution initiale, des itérations permettent de parcourir le voisinage afin de trouver de meilleures solutions. Alors que les meilleures solutions sont toujours acceptées, la particularité du recuit simulé vient de la probabilité d’accepter de moins bonnes solutions. Pour ce faire, une fonction de température est fixée afin de déterminer la probabilité d’acceptation d’une moins bonne solution. Plus la dégradation associée à une solution est grande, moins celle-ci a de chance d’être acceptée. De plus, au fur et à mesure que le temps avance, la probabilité d’accepter de moins bonnes solutions diminue avec la température, et ce, jusqu’à l’atteinte d’un critère d’arrêt préalablement déterminé. Basée sur les travaux traitant de systèmes thermodynamiques de Metropolis et al. (1953), cette heuristique a été développée parallèlement par Kirkpatrick, Gelatt & Vecchi (1983) et par Cerný (1985).
Le recuit déterministe est similaire au SA mis à part le fait qu’il utilise une règle déterministe (et non probabiliste) pour l’acceptation des solutions. Les méthodes les plus connues sont la technique du seuil d’acceptabilité (threshold accepting – Dueck & Scheurer, 1990) et le parcours enregistrement par enregistrement (record-to-record travel – Dueck, 1993; Li, Golden & Wasil, 2005).
La méthode de recherche avec tabous parcourt un voisinage avant d’arrêter le choix du mouvement à effectuer. La particularité de cette méthode est qu’elle fonctionne avec une mémoire : le changement effectué sera enregistré dans une liste, dite tabou, et l’inverse de ce changement sera interdit pour un certain nombre d’itérations. L’un des premiers articles sur le sujet est celui de Glover (1986). Depuis, les exemples d’applications de méthode de recherche avec tabous sont très nombreux dans la littérature, citons entre autre Taillard (1993), Gendreau, Hertz & Laporte (1994), Rego & Roucairol (1996), Cordeau, Laporte & Mercier (2001), Toth & Vigo (2003) et Tarantilis (2005). Il est reconnu que les méthodes de recherche avec tabous obtiennent de très bons résultats, mais au prix de temps de calcul souvent élevés et de nombreux paramètres à fixer. La recherche actuelle se concentre vers le
développement de méthodes plus rapides, plus simples et plus robustes (voir Cordeau & Laporte 2002).
Les algorithmes de recherche dans de très grands voisinages ont comme principe de base de parcourir efficacement et rapidement un grand voisinage, ce qui implique un défi de taille. Selon les auteurs, ces algorithmes allient diverses méthodes de construction et d’amélioration, passant de l’insertion au retrait des nœuds ou d’arcs. Les idées les plus récentes à ce sujet ont été développées par Agarwal et al. (2004), Ergun, Orlin & Steele-Feldman (2006), Kytöjoki et al. (2007) et Pisinger & Ropke (2007).
L’algorithme des attributs basé sur le grimpeur de colline est la seule métaheuristique qui ne nécessite pas de paramétrage. Son fonctionnement repose sur la caractérisation de l’espace des solutions en se basant sur les attributs. La valeur d’un attribut est fixée égale à la valeur de la meilleure solution qui possédait cet attribut (la valeur d’un attribut est initialement fixée à l’infini). À titre d’exemple pour le voyageur de commerce, nous pourrions définir un attribut comme étant tout arc dans la solution. La valeur de l’attribut
( )
,i j est la valeur de la meilleure solution où l’arc( )
,i j était présent. Tout comme la méthode de recherche avec tabous, l’algorithme fait une recherche dans le voisinage avant de s’arrêter à une solution. Sa particularité repose sur le fait que, contrairement à la méthode de recherche avec tabous qui n’accepte que la meilleure solution d’un voisinage nonobstant les attributs impliqués, l’ABHC accepte une solution candidate si et seulement si cette dernière a une valeur qui est meilleure que la valeur d’au moins un de ses attributs. Ceci garantit une amélioration continuelle des solutions associées aux attributs et empêche l’algorithme de revisiter une solution déjà évaluée. Cet algorithme a été présenté pour la première fois par Whittley & Smith (2004), puis récemment par Derigs & Kaiser (2007).2.2.3.2. Mécanisme de population
Le mécanisme de population le plus connu est l’algorithme génétique (genetic algorithm – GA). Les algorithmes génétiques fonctionnent en simulant l’évolution naturelle : les parents
transmettent chacun une partie de leurs gènes (codés par des chromosones binaires) à leurs enfants. La nature étant imparfaite, il arrive que ces enfants soient une bonne reproduction ou subissent certaines mutations. Le VRP ne se prêtant pas naturellement à un encodage binaire, cette heuristique telle qu’initialement développée est au départ peu appropriée. Plus précisément, le croisement de deux parents peut impliquer que certains nœuds soient visités deux fois alors que d’autres seront carrément omis, ne résolvant pas le problème. Diverses méthodes de croisement évitant ces problèmes ont été développées. L’un des premiers articles sur le sujet a été écrit par Holland (1975). Parmi les articles récents utilisant ce type d’algorithme figurent ceux de Mester & Bräysy (2005, 2007). Des algorithmes génétiques sont nés des algorithmes hybrides, dites mémétiques, qui utilisent à la fois les qualités du génétique ainsi que celles d’autres métaheuristiques. Prins (2004) et Nagata (2007) font partie des auteurs ayant étudié et développé ces algorithmes. Enfin, la procédure de mémoire adaptative (adaptative memory procedure – Rochat & Taillard, 1995) utilise également la notion de population pour générer de bonnes solutions qui sont modifiées dynamiquement pendant le processus. Plus récemment, elle a été utilisée par Tarantilis & Kiranoudis (2005).
2.2.3.3. Mécanismes d’apprentissage
Il existe deux grands types de mécanismes d’apprentissage : les réseaux de neurones (neural networks – NN) et les algorithmes de colonies de fourmis (ant systems – AS). Les réseaux de neurones sont inspirés du fonctionnement des neurones humains. Ils sont des ensembles d’unités liées par des connections pondérées transmettant l’information et permettant un apprentissage. Cette technique génère habituellement de piètres performances en termes de précision et de rapidité pour résoudre le TSP et le VRP. Ghaziri (1991) et Schumann & Retzko (1995) ont utilisé ces approches. Ce type d’heuristique peut être efficace lorsque la route prend une forme circulaire, sans quoi la littérature démontre que les résultats obtenus par ces heuristiques sont mauvais et qu’ils ne sont pas à la hauteur de ceux générés par d’autres heuristiques.
Par contre, l’idée d’apprentissage a permis de développer d’autres algorithmes. Les algorithmes de colonies de fourmis sont initialement basés sur le comportement coopératif et par apprentissage de la fourmi qui laisse des traces de phéromones sur son passage pour communiquer (Colorni, Dorigo & Maniezzo, 1991). L’intensité des traces de phéromones est une indication de l’intérêt d’un chemin donné et, implicitement, sur celui qui procure la distance totale la plus courte. Quoique souvent décrites comme étant révolutionnaires, ces heuristiques n’ont pas encore démontré une réelle efficacité et leur performance est rudement mise à l’épreuve. Malgré tout, les recherches à ce niveau sont très prometteuses, particulièrement lorsqu’elles sont hybridées avec d’autres méthodes. Notons entre autre l’heuristique D-Ants (Decompostion-Ants) développée par Reimann, Doerner & Hartl (2004) qui propose un algorithme d’économies basé sur les colonies de fourmis et sur une décomposition du problème.
Pour des études plus détaillées des métaheuristiques, le lecteur pourra se référer au livre de Glover & Kochenberger (2003) et aux articles de Laporte et al. (2000), Cordeau et al. (2002, 2005), Gendreau, Laporte & Potvin (2002) et Laporte (2007).
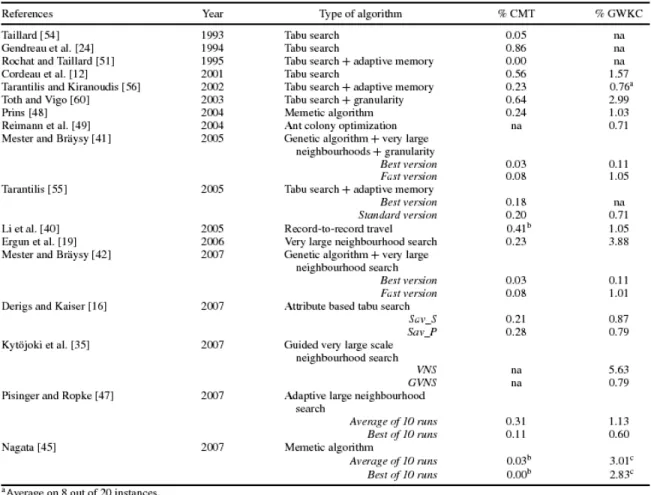
Pour terminer cet énoncé des diverses heuristiques, la Table 2.1 (tirée de Laporte 2007) présente la performance de plusieurs méthodes en comparant les résultats obtenus à l’aide de deux banques de problèmes : celles de Christofides, Mingozzi & Toth (1979 – CMT) et celles de Golden et al. (1998 – GWKC). Les pourcentages (%) représentent la déviation moyenne par rapport aux meilleures solutions connues dans la littérature. Le temps de résolution n’est toutefois pas reporté compte tenu du fait que ces temps sont difficilement comparables puisque les résolutions ont été réalisées sur des ordinateurs différents. Malgré tout, ce tableau permet d’observer l’efficacité des diverses méthodes les unes par rapport aux autres.
Table 2.1 – Comparaison des solutions obtenues avec diverses heuristiques
2.3. Problème de tournées de véhicules avec flotte hétérogène
Le problème de tournées de véhicules avec flotte hétérogène (Heterogeneous fleet Vehicle
Routing Problem – HVRP) est plus compliqué que le VRP classique puisqu’en plus des
décisions de tournées, une décision quant au nombre de véhicules de chaque type à utiliser doit être prise. L’objectif est de trouver les routes de coûts minimums, débutant et se terminant à un dépôt, d’une flotte limitée de véhicules hétérogènes (capacités variées) en prenant en considération les coûts fixes et variables des véhicules pour répondre aux demandes (connues) d’un ensemble de clients. Deux versions du problème se retrouvent dans la littérature : le HVRP avec flotte illimitée et celui avec flotte limitée.
Le HVRP avec flotte illimitée a été abordé pour la première fois par Golden et al. (1984) dont l’objectif était de déterminer la taille d’une flotte ainsi que la capacité des véhicules la composant. Par la suite, de nombreuses méthodes pour résoudre ce problème ont été proposées. Osman & Salhi (1996) ont développé une méthode de recherche avec tabous à mémoire à court terme impliquant des échanges d’au plus un client à la fois dans le voisinage. La méthode de recherche avec tabous de Gendreau et al. (1999) explore un plus grand voisinage et implique l’utilisation d’une procédure de mémoire adaptative pour sélectionner la meilleure combinaison de véhicules de divers types afin de desservir tous les clients tout en minimisant les coûts. Wassan & Osman (2002) ont développé une heuristique encore plus sophistiquée en utilisant une méthode de recherche avec tabous réactive, des voisinages variables et des structures de mémoire particulières.
D’autres méthodes ont aussi été utilisées pour solutionner le HVRP avec flotte illimitée, telles que l’approche de balayage (Renaud & Boctor, 2002), l’algorithme mémétique (Lima, Goldbarg & Goldbarg, 2004) et la génération de colonnes (Choi & Tcha, 2007). Une approche par génération de colonnes a également été utilisée par Taillard (1999). Ce dernier a été le premier à solutionner non seulement le HVRP avec flotte illimitée, mais également celui avec flotte limitée. Pour ce second problème, il a utilisé une méthode de partition généralisée résolue par Ilog Cplex.
Le HVRP avec flotte limitée a été récemment étudié par de nombreux auteurs, chacun abordant le problème avec une vision différente. Une méthode d’acceptation avec seuil (threshold accepting) a été utilisée par Tarantilis, Kiranoudis & Vassiliadis (2003, 2004), une méthode enregistrement par enregistrement (record-to-record) par Li, Golden & Wasil (2005, 2007) et une méthode gloutonne par Yepes & Medina (2006). Enfin, d’un point de vue mathématique, Yaman (2006) s’est concentré sur la formulation du problème ainsi que sur l’étude d’inégalités valides.
De nombreuses variantes du HVRP ont été étudiées. Liu & Shen (1999) ont utilisé une construction basée sur les économies, inspirée de Clarke & Wright (1964), couplée à des phases de perturbations intra et inter-routes pour un HVRP avec fenêtres de temps. Prins (2002), quant à lui, a utilisé ce même type de construction pour solutionner un HVRP
multi-tournées (multi-trips). Sa méthode MER construit les routes en se basant sur les économies puis améliore la solution en utilisant de la recherche locale, i.e. de la méthode de recherche avec tabous et de la recherche par descente étapiste (steepest descent local
search). Pour terminer, citons Dondo & Cerdá (2007) qui ont traité d’un problème
multi-dépôts avec fenêtre de temps en utilisant une méthode par agrégation (cluster).
2.4. Problème de tournées de véhicules avec flotte privée et transporteur
externe
Une généralisation intéressante du problème de tournées de véhicules est d’ajouter la considération d’un transporteur externe. Dès lors, le problème de transport ne se résume plus uniquement à concevoir les tournées, mais il implique aussi le choix du véhicule à utiliser pour visiter chacun des clients. C’est le problème de tournées de véhicules avec flotte privée et transporteur externe (Vehicle Routing Problem with Private fleet and
Common carrier – VRPPC).
Ball et al. (1983) ont été parmi les premiers à considérer un tel problème où ils tentaient d’optimiser l’utilisation d’une flotte privée de véhicules homogènes en présence d’un transporteur externe. En utilisant une cartographie sectorielle, Klincewicz, Luss & Pilcher (1990) ont développé une méthode où ils déterminent la taille de la flotte privée et assignent la couverture de chaque secteur soit à cette flotte, soit au transporteur externe. Un problème un peu plus simple, i.e. celui où la flotte privée n’inclut qu’un seul véhicule, est étudié par Volgenant & Jonker (1987). Dans ces conditions, ces derniers ont démontré que cela correspond à un problème du voyageur de commerce; Diaby & Ramesh (1995) ont réussi à le solutionner de façon exacte en utilisant des inégalités valides.
Hall & Racer (1995) ont développé une méthodologie qui permet de décider si un client sera desservi par la flotte privée ou par un transporteur externe en se basant sur la structure des coûts et les caractéristiques du problème mais sans prendre les décisions de tournées de la flotte privée. Min (1998) a étudié une application pratique du problème où il y a
plusieurs entreprises de transport externe. Il a développé un système d’aide à la décision basé sur des critères quantitatifs et qualitatifs. Tout comme Hall & Racer, son objectif était d’en arriver à prendre une décision a priori, i.e. sans avoir à concevoir les tournées.
Chu (2005) a introduit le cas où la flotte privée est constituée de véhicules hétérogènes. Il en présente la modélisation ainsi qu’une méthode de résolution basée sur une procédure de construction par économies améliorée à l’aide d’échanges intra et inter-route. Tout comme les méthodes précédentes, la décision assignant les clients au transporteur externe est prise a priori. Les problèmes utilisés par Chu possèdent une structure particulière de sorte qu’en assignant à l’externe le client ayant la demande la plus élevée, la demande totale restante est inférieure à la capacité des camions de la flotte privée. Toutefois, lors de la création des tournées, il est possible que d’autres clients ne puissent être intégrés aux routes, ces derniers sont donc également assignés au transport externe.
2.5. Problème routage-stocks
Le problème de routage-stocks (Inventory Routing Problem – IRP) est une extension du VRP où sont gérés simultanément les tournées des véhicules et les stocks des clients. Il est difficile de situer de façon exacte les premiers écrits traitant du IRP. Beltrami & Bodin (1974) abordent le problème dans un contexte de gestion des déchets. L’IRP a également été associé à un problème d’allocation des demandes des clients aux journées de la semaine pour ensuite résoudre un problème de transport journalier (Russell & Igo, 1979). Fisher et
al. (1982) et Bell et al. (1983) traitent d’un problème de distribution de gaz industriel de
très grande taille. Depuis, plusieurs auteurs ont travaillé sur ce problème et nombre d’entre eux ont présenté des revues de la littérature dont Baita et al. (1998), Moin & Salhi (2006) et Campbell (2006).
La littérature en IRP étant prolifique, cette revue se concentre sur l’évolution générale de la recherche dans le domaine. Elle débute par la description du IRP classique puis présente diverses variantes qui ont été étudiées.
Dans sa forme classique, l’IRP est défini comme suit (voir la thèse de Dror, 1983; Campbell, Clarke & Savelsbergh, 2002). Le problème implique de planifier la distribution d’un produit, provenant d’un seul dépôt vers un ensemble de clients i=
{
1,...,N}
sur unhorizon de planification de T périodes, définies comme étant habituellement des journées. Chaque client consomme le produit à un taux u , soit un volume par jour, et a une capacité i
de stockage maximale de C ; son stock initial est i I . Il est pris pour hypothèse que la i0
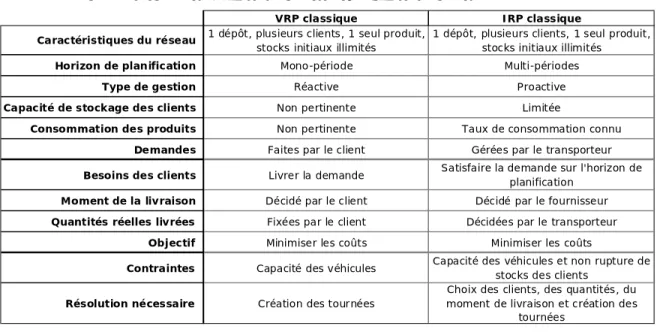
capacité du dépôt est supérieure à la demande des clients. Une flotte de M véhicules homogènes de capacité Q est disponible pour le transport. L’IRP implique de déterminer, de façon proactive, pour l’ensemble de l’horizon de planification, les clients et les quantités correspondantes à livrer à chaque journée ainsi que les tournées des véhicules de façon à ce qu’aucun client ne manque de produits et que les coûts des tournées soient minimisés. À l’opposé, le VRP est réactif par rapport à la gestion de la demande puisqu’il ne détermine pas les quantités à livrer. La version classique du IRP considère la demande comme étant déterministe, les niveaux de stocks ainsi que les quantités à livrer sont donc connues. La Table 2.2 compare les caractéristiques du VRP et du IRP.
Table 2.2 – Comparaison du VRP classique avec l’IRP classique
VRP classique IRP classique
Caractéristiques du réseau 1 dépôt, plusieurs clients, 1 seul produit,
stocks initiaux illimités
1 dépôt, plusieurs clients, 1 seul produit, stocks initiaux illimités
Horizon de planification Mono-période Multi-périodes
Type de gestion Réactive Proactive
Capacité de stockage des clients Non pertinente Limitée
Consommation des produits Non pertinente Taux de consommation connu
Demandes Faites par le client Gérées par le transporteur
Besoins des clients Livrer la demande Satisfaire la demande sur l'horizon de planification
Moment de la livraison Décidé par le client Décidé par le fournisseur
Quantités réelles livrées Fixées par le client Décidées par le transporteur
Objectif Minimiser les coûts Minimiser les coûts
Contraintes Capacité des véhicules Capacité des véhicules et non rupture de stocks des clients
Résolution nécessaire Création des tournées
Choix des clients, des quantités, du moment de livraison et création des
tournées
Au cours des années, ces caractéristiques de base ont fait naître de nombreuses variantes du IRP, telles que présentées par Bertazzi, Savelsbergh & Speranza (2007) :
• l’horizon de planification peut être d’une durée déterminée ou infinie; • les coûts de stockage peuvent être considérés ou non;
• les coûts de stockage peuvent être à la charge du fournisseur seulement, du fournisseur et des clients ou des clients seulement;
• les taux de production et de consommation peuvent être déterministes ou stochastiques;
• la production et la consommation peuvent être faites à des temps discrets ou bien de façon continue (i.e. la disponibilité des produits au dépôt est limitée par le calendrier de production et la consommation peut être variable ou non);
• les taux de production et de consommation peuvent être constants ou variés dans le temps;
• la stratégie de livraison peut être choisie parmi plusieurs stratégies ou parmi une classe spécifique de stratégies.
Compte tenu de la complexité associée à la planification multi-périodes, plusieurs auteurs se sont concentrés sur le problème mono-période qui découle d’un choix a priori des clients à visiter à chaque journée (Federgruen, Prastacos & Zipkin, 1986; Chien, Balakrishnan & Wong, 1989). L’objectif est de minimiser les coûts journaliers de transport, de stockage et de pénuries. Les effets des décisions à court terme sur le long terme ont été étudiés par Dror & Ball (1987).
Dans sa version multi-périodes avec horizon de planification défini, l’IRP nécessite une planification à long terme rigoureuse. Une telle planification étant complexe, la plupart des travaux présentent une méthode de planification sur un horizon roulant à court terme pouvant être répétée tout au long de l’horizon de planification. Certains utilisent la programmation en nombres entiers (Fisher et al., 1982; Trudeau & Dror, 1992; Dror & Trudeau, 1996) et d’autres des approches de décomposition en deux phases (Campbell, Clarke & Savelsbergh, 2002; Campbell & Savelsbergh, 2004a). D’autres chercheurs se sont concentrés à analyser la fréquence à laquelle les livraisons devraient être faites (Bertazzi, Speranza & Ukovich, 1997), à évaluer les quantités devant être livrées (Campbell & Savelsbergh, 2004b) ou les deux (Zhao et al., 2004). Jaillet et al. (2002) ont abordé le choix des clients à visiter. Certains auteurs ont proposé de modifier le problème
en créant des regroupements de clients par régions géographiques (Zhao, Chen & Zang, 2008). Enfin, d’autres ont opté pour des méthodes impliquant plusieurs tournées par véhicule et par période (Raa & Aghezzaf, 2008).
L’aspect concernant la planification des tournées est plus ou moins important en fonction du problème traité. Par exemple, dans la distribution du gaz (Bell et al., 1983) ou des produits pétroliers (Dror & Trudeau, 1996; Cornillier et al., 2008a), chaque route renferme très peu des clients, ce qui réduit l’importance de la planification des routes. Dans d’autres contextes, comme la livraison de l’huile à chauffage, les routes peuvent avoir plusieurs dizaines de clients ce qui implique la résolution d’un problème de tournées plus complexe. Burns et al. (1985) ont analysé s’il était plus avantageux de faire des allers-retours ou bien des tournées, la seconde ayant prouvé sa rentabilité dans un contexte de distribution général. Blumenfeld et al. (1985) ont étudié les avantages et les inconvénients des envois directs (direct shipping) par rapport à la consolidation. Dans le cas de véhicule en charge complète, Barnes-Schuster & Bassok (1997) ont démontré qu’il est plus avantageux de livrer directement aux clients plutôt que d’utiliser un point de stockage intermédiaire. Finalement, Campbell & Hardin (2005) ont voulu déterminer le nombre de véhicules minimum nécessaire pour desservir adéquatement les clients.
Le problème avec horizon infini cherche généralement à minimiser les coûts moyens globaux (Burns et al., 1985) ou à restreindre la longueur des trajets (Gallego & Simchi-Levi, 1990). Dans la plupart des modèles à horizon infini, le taux de consommation est supposé constant et déterministe (Moin & Salhi, 2006). De nombreuses recherches ont été faites sur ce problème, passant de la détermination de bornes inférieures à la division du problème en régions. Citons, à titre de références, les écrits suivants : Webb & Larson (1995), Anily & Bramel (2004) et Jung & Mathur (2007).
Les recherches suivantes se concentrent principalement sur le problème à long terme. La version stochastique du problème (stochastic inventory routing problem) sur un horizon infini implique que la demande des clients n’est pas connue de façon précise et peut varier. Bon nombre de recherches ont été faites pour évaluer de façon probabiliste cette demande