Optimally Gathering Two Robots
Texte intégral
Figure
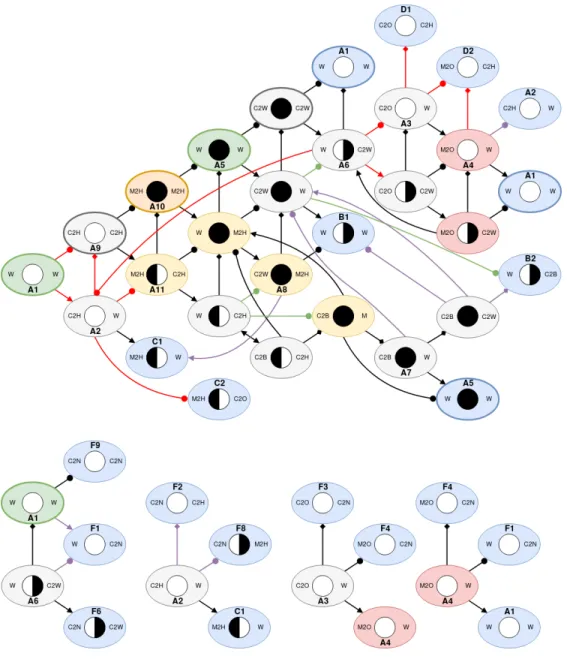
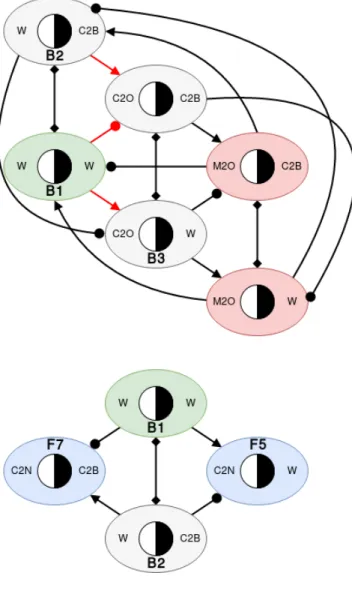
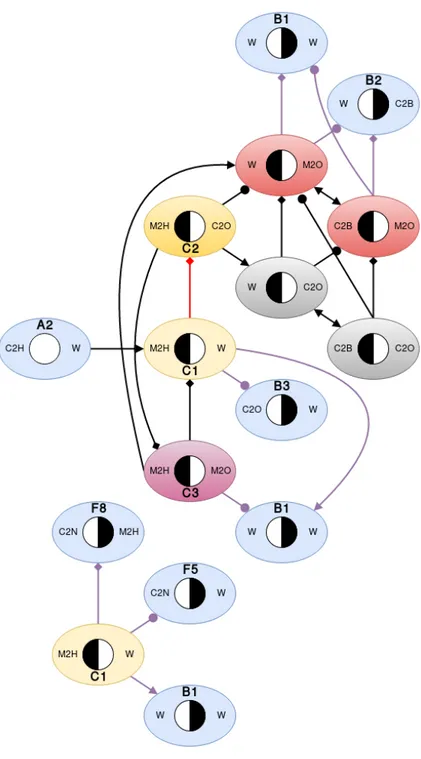
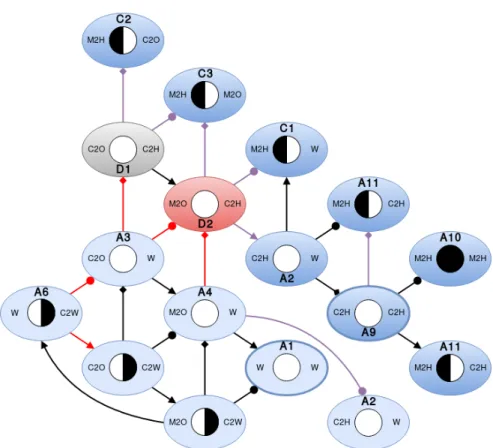
![Figure 1: Viglietta’s [23] Algorithm](https://thumb-eu.123doks.com/thumbv2/123doknet/8317354.280295/6.918.181.748.117.286/figure-viglietta-s-algorithm.webp)


Documents relatifs
To solve this issue, in this paper, we will analyze the robot trajectory in singular situation, and we will determine a feasible trajectory to avoid singularity through a
The problem of determining the movement pattern for a certain number of flying robots when they have to film an event while maximizing viewer satisfaction and minimizing the
If activating one of the blue robots, it does not reach the position occupied by the red one, activate all blue robots If activating the red robot, it does not reach the position
La présente étude avait pour but la mise en place d’une méthode d’évaluation d’exposition rétrospective, à la fois fiable et réalisable, dans un contexte
To see that a qualitative argument can be used: we know that the completely ordered case minimize the energy and we are interested in the states that have the closer possible
Thus each mathematical symbol (G, L,. .) has a single definite meaning inside each exercise, but might have different meanings from an exercise to another.. It is not required to
- Society of Wikimedia: Frederick Irving Herzberg, on the site: Https: //en.wikipedia .org/wiki/
This study shows that households in the sample population considered themselves as farmers, and that they depended more on agricultural products than on the collection and sale of
