Conservation Laws with Unilateral Constraints in Traffic Modeling
Texte intégral
Figure
![Fig. 1. Left, a flow satisfying the requirements of Theorem 2.2. Superimposed are the experimental measurements from [16]](https://thumb-eu.123doks.com/thumbv2/123doknet/13352051.402422/5.892.183.709.527.722/fig-left-satisfying-requirements-theorem-superimposed-experimental-measurements.webp)

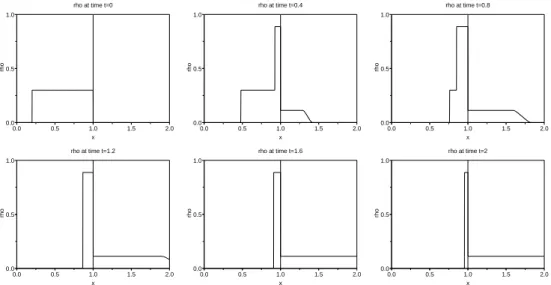
![Fig. 7. Numerical integrations of (4.9) using the scheme in [4]. The vertical segments denote the positions of the obstacle and of the exit](https://thumb-eu.123doks.com/thumbv2/123doknet/13352051.402422/10.892.192.738.253.538/numerical-integrations-scheme-vertical-segments-denote-positions-obstacle.webp)
Documents relatifs
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
CJEU case law has, however also held that Member States have a positive obligation to grant and ensure that their courts provide “direct and immediate protection” of rights
first agent perceives the fire, he is scared and executes a behavior revealing his fear; the other agents perceive these behaviors; they are scared in turn and react to this emotion;
l’utilisation d’un remède autre que le médicament, le mélange de miel et citron était le remède le plus utilisé, ce remède était efficace dans 75% des cas, le
51 However, despite the strong theses which lead the historians to include The Spirit of the Laws among the classics of liberalism – critique of despotism and of
In a similar fashion, the figure of the writer in In the Memorial Room is diffused through different characters in the novel: Harry of course, but also the national heritage
The model given in (Moulay, Aziz-Alaoui & Cadivel 2011, Moulay, Aziz-Alaoui & Kwon 2011) takes into account the mosquito biological life cycle and de- scribes the
We will then examine sorne of the social meanings attributed to these creoles by French and English Canadian teachers and by the West Indians them- selves in
