HAL Id: hal-01813487
https://hal.archives-ouvertes.fr/hal-01813487
Submitted on 12 Jun 2018
HAL is a multi-disciplinary open access
archive for the deposit and dissemination of
sci-entific research documents, whether they are
pub-lished or not. The documents may come from
teaching and research institutions in France or
abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est
destinée au dépôt et à la diffusion de documents
scientifiques de niveau recherche, publiés ou non,
émanant des établissements d’enseignement et de
recherche français ou étrangers, des laboratoires
publics ou privés.
Open-loop control of cavity noise using Proper
Orthogonal Decomposition reduced-order model
Kaushik Kumar Nagarajan, Sintu Singha, Laurent Cordier, Christophe Airiau
To cite this version:
Kaushik Kumar Nagarajan, Sintu Singha, Laurent Cordier, Christophe Airiau. Open-loop control of
cavity noise using Proper Orthogonal Decomposition reduced-order model. Computers and Fluids,
Elsevier, 2018, 160, pp.1-13. �10.1016/j.compfluid.2017.10.019�. �hal-01813487�
O
pen
A
rchive
T
OULOUSE
A
rchive
O
uverte (
OATAO
)
OATAO is an open access repository that collects the work of Toulouse researchers and
makes it freely available over the web where possible.
This is an author-deposited version published in :
http://oatao.univ-toulouse.fr/
Eprints ID : 20149
To link to this article : DOI:
10.1016/j.compfluid.2017.10.019
URL :
https://doi.org/10.1016/j.compfluid.2017.10.019
To cite this version :
Nagarajan, Kaushik Kumar and Singha, Sintu
and Cordier, Laurent and Airiau, Christophe Open-loop control of
cavity noise using Proper Orthogonal Decomposition reduced-order
model. (2018) Computers and Fluids, vol. 160. pp. 1-13. ISSN
0045-7930
Any correspondence concerning this service should be sent to the repository
administrator:
[email protected]
Open-loop
control
of
cavity
noise
using
Proper
Orthogonal
Decomposition
re
duce
d-order
model
Kaushik
Kumar
Nagarajan
a,∗,
Sintu
Singha
a,
Laurent
Cordier
b,
Christophe
Airiau
ca National Aerospace Laboratories, Bengaluru, 560017, India
b Institut Pprime, CNRS – Université de Poitiers – ISAE-ENSMA, 86962 Futuroscope Chasseneuil, France
c IMFT (Institut de Mécanique des Fluides de Toulouse), UMR 5502 CNRS/INPT-UPS, Université de Toulouse, 2 allée du Pr. Camille Soula, Toulouse, F-31400,
France MSC: 76N25 76M30 76Q05 93A30 Keywords:
Open cavity flow Optimal control Noise reduction
Proper Orthogonal Decomposition Reduced-order modeling
a
b
s
t
r
a
c
t
Flowoveropencavitiesismainlygovernedbyafeedbackmechanismduetotheinteractionofshearlayer instabilitiesandacousticforcingpropagatingupstreaminthecavity.Thisphenomenonisknowntolead toresonanttonesthatcanreach180dBinthefar-fieldand maycausestructuralfatigueissuesand an-noyingnoiseemission.Thispaperconcernstheuseofoptimalcontroltheoryforreducingthenoiselevel emittedbythecavity.Boundarycontrolisintroducedatthecavityupstreamcornerasanormalvelocity component.Model-basedoptimalcontrolofcavitynoiseinvolvesmultiplesimulationsofthe compress-ibleNavier–Stokesequationsand itsadjoint,whichmakesitacomputationallyexpensiveoptimization approach.Toreducethecomputationalcosts,weproposetouseareduced-ordermodel(ROM)basedon ProperOrthogonalDecomposition(POD)asasurrogatemodeloftheforwardsimulation.Forthat,a con-trolinputseparationmethodisfirstusedtointroduceexplicitlythecontroleffectinthemodel.Then, anaccurateandrobustPODROMisderivedbyusinganoptimization-basedidentificationprocedureand generalizedPODmodes,respectively.SincethePODmodesdescribeonlyvelocitiesandspeedofsound, weminimizeanoise-relatedcostfunctionalcharacteristicofthetotalenthalpyunsteadiness.After opti-mizingthecontrolfunctionwiththereduced-ordermodel,weverifytheoptimalityofthesolutionusing theoriginal,high-fidelitymodel.Amaximumnoisereductionof4.7dBisreachedinthecavityandupto 16dBatthefar-field.
1. Introduction
Flowpastopen cavitiesiswellknowntoexhibitself-sustained instabilities, leading to an undesirable aeroacoustic noise. These flow-induced oscillations arise from a feedback loop caused by a strong coupling of hydrodynamic instabilities with the acous-ticperturbations.Insummary,Kelvin-Helmholtzinstabilitiesgrow intheseparatedshearlayer,creatingcoherentstructuresthat im-pactonthedownstreamedgeofthecavity.Thisphenomenon radi-atesacousticwavesthatpropagateupstreaminsidethecavity.The highleadingedge receptivitycausestheseunsteadyperturbations to further excite the shear layer instabilities. This self-sustained mechanismleadstohighnoiselevelsinthefar-fieldandmaylead to structural fatigue, optical distortion andannoying noise emis-sion. Inengineeringapplications, cavityflows are encountered in aircraftlandinggears,pantographrecessofhighspeedtrains,
sun-∗ Corresponding author.
E-mail address: [email protected] (K.K. Nagarajan).
roofofcars,etc.Theseflowsarelargelycharacterizedbythe pres-ence of a global instability,that dominates the flow, and belong to the oscillators’ category as defined by Huerre and Rossi [21]. Reducing the cavity noise is then ofextreme importance forthe development of quieter transport means. It is now well-known that thecontrolofinstabilitiesforoscillatorflows isfeasiblewith a model-based approach relying on linear control tools [35]. In this paper, the objective is to reduce the level of noise emitted by the cavity withan optimalcontrol approach based ona non-linearmodelofthedynamics.High-fidelitynumericalsimulations, likeDirectNumericalSimulation(DNS)ofNavier–Stokesequations (NSE), are tooexpensiveforflowcontrol applications.This obser-vationisparticularlytruewheniterativeoptimizationmethodsare used asin the case of optimal control [19]. It is then necessary to derive surrogate models for reducing the computational costs relatedto optimalcontrolofhigh-dimensional nonlinearsystems. Starting froman experimentalorcomputationaldatabase, the ob-jectiveistoderiveReduced-OrderModels(ROMs)whichminethe relevantinformationcontentintermsofdynamics.
Inthelast decade,Reduced-OrderModelsbasedonProper Or-thogonalDecomposition(POD)havegainedalotofpopularity for modelingthedynamicsofcomplexsystems [9,10].These reduced-ordermodelsarederivedbyaGalerkinprojectionofthegoverning equations (inour case,the compressibleNSE) ontothe dominant PODmodes.TwomaindifficultiesarisewiththeuseofPOD-based ROMs inflow optimization. First,thesereduced-order modelsare ingeneralnotsufficientlyaccurate todescribecorrectlythe origi-naldynamics,evenovershortperiodsoftime.Thisismainlydue tothetruncationissuedfromtheGalerkinprojectionwhereonlya smallset ofPODmodesarekept inthemodel.Second,the POD-based ROMs often exhibit a lack of robustness to the change of control parametersduringtheoptimizationprocedure.Forthe ac-curacy of the model,a variety of numericalstrategies havebeen tested over the years [4,8,11,22,29]. The overall philosophy is to performasystemidentificationtominimizetheerrorbetweenthe solutions obtainedbyDNSandtheone obtainedbytime integra-tionofthereduced-ordermodel.Concerningtherobustnessofthe model,theidealwouldbetoderivereduced-ordermodelsdirectly parameterized by the control parameters. However, this is still a matterofdevelopmentinthereduced-ordermodelingcommunity
[2]. One alternative consistsin generating generalizedPOD func-tionsbyforcingtheflowwithanad-hoctimedependentexcitation that isrichinfrequencycontent.Thebasicideaistoincreasethe ability ofPODmodesto approximatecorrectlythedynamics cor-respondingtodifferentactuatedflows.Thisapproachwasassessed in Bergmannet al. [4] fora circular cylinderwake configuration, whereaPODROMwasusedtominimizeadrag-relatedcost func-tionalcharacteristicofthewakeunsteadiness.Anotheralternative istouseanadaptiveapproachinwhichnewreduced-order mod-els are regularly and automatically determined during the opti-mizationprocesswhentheeffectivenessoftheexistingPOD-based reduced-order modelisinsufficienttorepresentaccuratelythe ac-tuatedflow. Thisapproach,calledTrust-RegionProperOrthogonal Decomposition (TRPOD),was originally proposedin Fahl [13] and later appliedtothedrag minimizationofacircularcylinderwake flowinBergmannandCordier [3].AninterestofTRPODisthe exis-tenceofrigorousconvergenceresultswhichguaranteethatthe so-lutionsobtainedbytheTRPODalgorithmconvergetothesolution of the original optimization problemdefined by the high-fidelity model.RegardingtheuseofReduced-OrderModelingforflow con-trol,thereaderisreferredtoNoacketal. [27].Anextensivereview ofclosed-loopTurbulencecontrolcanbefoundintherecentpaper ofBruntonandNoack [6].
Self-sustainedoscillationsofflowoverrectangularcavitieshave been studied with the aim of understanding the hydrodynamic feedback mechanism that leads to noise emission [5,15,30]. Ad-vances inunderstanding,modeling, andcontrolling oscillationsin theflowpastacavityhavebeenreviewedinRowleyandWilliams
[32] withafocusonopen-andclosed-loopforcing strategies.The model reductionof compressiblecavityflows withreduced-order modelsbasedonPODhasbeendevelopedinRowleyetal. [31] and Gloerfelt [14]. In thesepapers, the main objective is to derive a surrogate model of the compressibleNavier–Stokes equations for studying long-time dynamics,orexploring a range ofparameters for the unactuated flow. More recently, feedback control of cav-ity flows using POD-based reduced order models is reported in Samimyetal. [33] andNagarajanetal. [26].However,asfaraswe know, open-loopcontrol ofthe cavityflow withan optimal con-trolapproachbasedonareduced-ordermodelderivedbyPODhas not yet been reported in the literature. The target is the reduc-tionofthelevelofnoiseemittedbythecavity.Aboundarycontrol is introduced at thecavity upstream corneras a normalvelocity componenttosimulateazeromassflowsyntheticjettype actua-tion.SincethePODmodesrepresentonlythevelocitycomponents andthespeed ofsound,a noise-relatedcost functional
character-isticofthetotalenthalpyunsteadinessisminimized.Theaccuracy andtherobustnessofthePOD-basedreduced-ordermodelare im-proved by an identificationprocedureand theuse ofgeneralized POD modes, respectively. The optimal control approach is solved usingaclassicalLagrange multipliersmethod.Theperformance of theoptimizedsolutionisevaluatedbyintroducingthecontrollaw intotheDNSsimulation.Theefficiencyoftheopen-loopcontrolis measured by introducing pressuresensors at variouslocations of thecavityinthenearandfarfield,andbycomputingthespectra ofpressure signals.Finally,the far-fieldacoustics ischaracterized byestimatingtheOverallSoundPressureLevel(OASPL).
Thisarticleis organized asfollows:in Section2, aframework forapplyingPODandGalerkinprojectiontocompressiblefluidsis presented.Theextensionofthisformalismtothecaseofactuated flows,andtheidentificationtechniqueusedforimprovingthe ac-curacyofthemodelarealsobrieflydiscussed.Theoptimalcontrol approach used in thispaper fordetermining the open-loop con-trol lawis described in Section 3. In Section 4, the applications ofreduced-ordermodelingfortheunactuatedandoptimized actu-atedflows are presented.Some concludingremarks and perspec-tivesfollowin Section5.
2. Reduced-ordermodelingbasedonProperOrthogonal
Decomposition
TheprincipleofProperOrthogonalDecompositionistoextract modesbasedonoptimizingthemeansquare ofthefield variable being examined [9]. POD is one of the most widely used tech-niques in analyzing fluid flows. Beyond this, an attractive prop-erty of POD is its potential forconstructing reduced-order mod-els [10]. Indeed,Galerkin projection can be usedto reduce high-dimensional discretization of partial differential equations into reduced-ordermodelsmadeofordinarydifferentialequations.Let
Ä
bethespatialdomainandq(x,t)anyvectorfieldofinterest(e.g., velocity)wherexandtrepresentspaceandtime,respectively.We seekaspace-timedecompositionofqintheform:q
(
x,t)
=q(
x)
+ NSnap X i=1 aP i(
t)
φ
i(
x)
, (1)where q represents the ensemble average of a set of NSnap flow snapshots. The spatial modes
φ
i and the temporal coefficients aPi are determined as the solutions of a constrained
optimiza-tion problem [7]. It can be shown that these modes can be de-termined by a singular value decomposition of the data matrix that collects an ensemble of snapshotsat different time instants
[20]. ThePOD modescan thenbe exploitedin aGalerkin frame-work to derive a reduced-order model by projection ofthe gov-erningequationsonto thedominantmodes. The flow pasta cav-ityisheremodeled withthesame compressibleisentropic equa-tionsasinRowleyetal. [31].Accordingtotheusualcompressible non-dimensionalization,thelengthscalesarenon-dimensionalized with the cavity depth D, the streamwise and spanwise velocity components,u andv,with the free streamvelocity U∞ ,and the speed of sound c by the free stream sound speed c∞ . The isen-tropicNavier–Stokesequationsmaybewrittenintwodimensions as ut =−uux−
v
uy− 1 M2 2γ
−1ccx+ 1 Re(
uxx+uyy)
v
t =−uv
x−vv
y− 1 M2 2γ
−1ccy+ 1 Re(
v
xx+v
yy)
ct =−ucx−v
cy−γ
−1 2 c(
ux+v
y)
,whereRe=U∞ D/
ν
istheReynoldsnumberandM=U∞ /c∞ isthe Machnumber.Intheseequations,theindicest,xandy standfor partialderivation.Denotingq=
(
u,v
,c)
,theseequationstaketheform: ˙ q= 1 ReL(
q)
+ 1 M2 Q1(
q,q)
+Q2(
q,q)
with (2) L(
q)
="
u xx+uyyv
xx+v
yy 0#
,Q1(
q1,q2)
=− 2γ
−1"
c1 c2 x c1c2 y 0#
, and Q2(
q1,q2)
=−
u1u2 x+v
1u2y u1v
2 x+v
1v
2y u1c2 x+v
1c2y+γ
−1 2 c 1(
u2 x+v
2y)
.Inordertoobtainvector-valuedPODmodes, andthenderivea reduced-order modelby Galerkinprojection,we mustfirst define an innerproduct.An appropriatechoice forcompressibleflows is toconsider:
¡
q1,q2¢
Ä= Z Ä(
u1 u2 +v
1v
2 + 2γ
−1c 1 c2)
dx, (3)where
γ
is the ratioof specific heats. This definitiongives stag-nation enthalpyastheinducednorm.Anotheradvantageofusing(3)fordefinitionisthattheoriginoftheattractorofthe reduced-ordermodelremainsstableasshowninRowleyetal. [31]. Insert-ing theexpansion (1) into (2),andtakingthe innerproduct with
φ
igives ˙ aR i(
t)
= 1 ReC 1 i + 1 M2 C 2 i +Ci3|
{z
}
Ci + NGal X j=1³
1 ReL 1 i j+ 1 M2 L 2 i j+L3i j´
|
{z
}
Li j aR j(
t)
+ NGal X j,k=1³
1 M2 Q 1 i jk+Q 2 i jk´
|
{z
}
Qi jk aR j(
t)
aRk(
t)
=Ci+ NGal X j=1 Li jaRj(
t)
+ NGal X j,k=1 Qi jkaRj(
t)
a R k(
t)
= fi(
Ci,Li,Qi|
{z
}
yi ,aR(
t))
= f i(
yi,aR(
t))
(4)wherefiisapolynomial ofdegree2inaR,andwhereNGal isthe number ofPODmodes keptin theprojection. The coefficientsof thedynamicalsystemaregivenby
C1 i =
¡
φ
i,L(
q)
¢
Ä, L 1 i j=¡
φ
i,L(
φ
j)
¢
Ä, C2 i =¡
φ
i,Q1(
q,q)
¢
Ä, L 2 i j=¡
φ
i,Q1(
q,φ
j)
+Q1(
φ
j,q)
¢
Ä, C3 i =¡
φ
i,Q2(
q,q)
¢
Ä, L 3 i j=¡
φ
i,Q2(
q,φ
j)
+Q2(
φ
j,q)
¢
Ä, and Qi jk1 =¡
φ
i,Q1(
φ
j,φ
k)
¢
Ä, Q2 i jk=¡
φ
i,Q2(
φ
j,φ
k)
¢
Ä.The temporal dynamicsof the coefficientsaR
i can now be
de-termined by a time integrationof (4) fromthe initial conditions
aP
i
(
0)
directly obtainedby POD. For that, a fourth order Runge–Kuttaschemeisused.
Since the main goal of deriving a POD-based reduced-order modelis flowcontrol,we needto extendtheprevious formalism by explicitlyintroducingthecontrol inthemodel.Following Kas-nakoglu [23],weseek [26] anorthogonalbasisexpansiongivenby
q
(
x,t)
=q(
x)
+q˜ac(
x,t)
+γ
(
t)
ψ
(
x)
, (5) with ˜ qac(
x,t)
= NGal X i=1 aac i(
t)
φ
i(
x)
, (6)andwhere
γ
andψ
representtheactuationandtheactuated spa-tial mode, respectively.In (5),q isthe meanfield definedin (1), andφ
j are the spatial eigenfunctions of the uncontrolled flow.ψ
is determined asa solution of an unconstrained minimization problemasdetailedinKasnakoglu [23] andNagarajanetal. [26]. Substituting (5) into (2) andthencarryingoutGalerkinprojection yieldsthefollowingreduced-ordermodelfortheactuated dynam-ics: ˙ aac i(
t)
=Ci+ NGal X j=1 Li jaac j(
t)
+ NGal X j,k=1 Qi jkaac j(
t)
aac k(
t)
+h1 iγ
(
t)
+ NGal X j=1 h2 i jaac j(
t)
γ
(
t)
+h3 iγ
2(
t)
. (7)Thecoefficientsofthismodelaregivenby
h1 i= 1 Re
¡
φ
i,L(
ψ
)
¢
Ä+¡
φ
i,Q(
q,ψ
)
¢
Ä+¡
φ
i,Q(
ψ
,q)
¢
Ä, h2 i j =¡
φ
i,Q(
φ
j,ψ
)
¢
Ä+¡
φ
i,Q(
ψ
,φ
j)
¢
Ä, h3 i=¡
φ
i,Q(
ψ
,ψ
)
¢
Ä, with Q(
·,·)
= 1M2 Q1
(
·,·)
+Q2(
·,·)
. It is well-known that a POD-based reduced-order modelingis ingeneralnot sufficiently accu-rateto describethe correctdynamicsofthe originalflow. Thisis true for uncontrolled flows where convergence to wrong attrac-tors, andevendivergence,havebeenreportedforlongtime inte-gration [36].Thisphenomenonisevenmorelikelytooccurwhen the goal of POD reduced-order models is to reproduce actuated flows. This inaccuracy is mainly attributed to the mode trunca-tion effectintroduced bythe Galerkinprojection.Manystrategies havebeenconsideredintheliteraturetotreattheseshortcomings. Amongthem,differentidentificationmethodshavebeenproposed in Cordier et al. [8]. The principle ofthese methods is to deter-mine thecoefficientsyi(i=1,· · ·,NGal)in (4) suchthat theerrorbetweenthe temporalPODcoefficientsaP
i
(
t)
determined by POD,and those obtained by time integration of (4) is minimizedin a given sense. In this work, a weighted regularization approach as in Nagarajanetal. [26] isusedto calibratethe coefficientsofthe reduced-ordermodel.
3. Open-loopcontrolofcavityflows
In this section, an optimalcontrol approach is used to deter-mine thecontrol
γ
.Acost functionalC,which includesthe con-trolobjectiveaswellasthecostofintroducingthecontrol,is min-imized over an optimizationtime horizon To. Adetaileddescrip-tion ofoptimal control theory can be found in Gunzburger [17],
[18]andCordier [7].Themainobstacletotheuseofoptimal con-trol is thehigh computational costs associated withthe solution whenahigh-fidelitymodelisusedtodescribethedynamicsofthe system. Forthatreason, thePODreduced-ordermodel (7) ishere employed asalow-dimensionalapproximationmodelofthe actu-ateddynamics.Sinceonlythevelocitycomponentsandthespeed of soundare representedby the PODmodes, it seems naturalto use thetotal stagnationenthalpy ofthe fluctuatingstate variable
˜
qac asaproxyforthecavitynoise.Mathematically,thisgoalis rep-resentedbythecostfunction:
C
(
q,γ
)
=ℓ1 2 ZTo 0k
q˜ ac(
x,t)
k
2 Ädt+ ℓ2 2 ZTo 0γ
2(
t)
dt. (8)The first term onthe right handside corresponds to the control goal andthesecond termrepresentsthecostassociated withthe control.Therealconstantsℓ1 andℓ2 aretheregularization param-eters whicharearbitrarily chosen tolimit thesizeofcontrol and
todefineawell-posedoptimizationproblem.Substitutingq˜acwith thePODexpansion (6) yieldsto:
C
(
aac ,γ
)
= ℓ1 2 Z To 0k
a ac(
t)
k
2 2 dt+ ℓ2 2 ZTo 0γ
2(
t)
dt =ℓ1 2 ZTo 0 NGal X i=1¡
aac i¢
2(
t)
dt+ℓ2 2 Z To 0γ
2(
t)
dt. (9)Theoriginalcontrolproblemisthenexpressedas
min γ (t) C(
aac ,γ
(
t))
constrainedto S(
aac,γ
(
t))
=0, (10)where the constraint S is given by the actuated reduced-order model (7).The Lagrange multipliersmethodis usedto solve this constrained optimization problem. For enforcing the constraints, Lagrange multipliersalsoreferredtoastheadjointvariables
ξ
are introduced,andanewLagrangianfunctionalisdefinedas A(
aac ,γ
,ξ
)
=C(
aac ,γ
(
t))
−h
ξ
,S(
aac ,γ
)
i
=C(
aac ,γ
(
t))
− NGal X i=1 Z To 0ξ
i(
t)
Si(
aac ,γ
)
dt. (11)ThemainpurposeofintroducingtheLagrangianfunctionalAisto transform the constrainedoptimizationproblem (10) into an un-constrained optimizationproblem that iseasier to solve.The so-lutions ofthisnewoptimizationproblemareobtainedatthe sta-tionarypointsofAi.e.for
δ
A= NGal X i=1µ
∂
A∂
aac iδ
a ac i¶
+∂
A∂γ
δγ
+ NGal X i=1µ
∂
A∂ξ
iδξ
i¶
=0where
δ
aac ,δγ
andδξ
arearbitraryvariationsforthestate,control andtheadjointvariables,respectively.The so-called optimality system is finally obtained by setting eachvariationofAwithrespecttotheparameters
ξ
,aac andγ
to zero.Collectingtheresults,weobtain:S
(
aac ,γ
(
t))
=0, (12a) dξ
i(
t)
dt =−ℓ1 a ac i(
t)
− NGal X j=1Ã
Lji+γ
(
t)
h2ji+ NGal X k=1¡
Qjik+Qjki¢
aac k(
t)
!
ξ
j(
t)
(12b)∂
A∂γ
=ℓ2γ
(
t)
+ NGal X i=1Ã
h1 i+ NGal X j=1 h2 i jaac j +2h3 iγ
(
t)
!
ξ
i. (12c)These equations, namely the state Eq. (12a), the adjoint
Eq. (12b) and the optimality condition (12c), are collectively re-ferred toastheoptimalitysystem.At theminimumofC,the op-timality condition isequalto zero.The adjointequation issolved backwardintimefromtheterminalcondition
ξ
i(
To)
=0.The optimality system(12) is solved iteratively.The algorithm is thefollowing:startwithaninitialguess
γ
(0) (t)forthecontrol pa-rameter.Form=0,1,2,...,+∞1. Solvethedirectsystem (12a) forwardintimetoobtainthe cor-respondingstatevariables
(
aac)
(m)(
t)
.2. Usethedirectvariablesobtainedinstep1tosolvetheadjoint system (12b) for
ξ
( m) (t).3. Usetheresultsofstep1and2tocomputethegradientofthe functional
∇
γC(m)(
t)
ontheinterval[0; To]by solvingtheop-timalitycondition (12c).
Fig. 1. Geometry and computational domain with dimensional quantities.
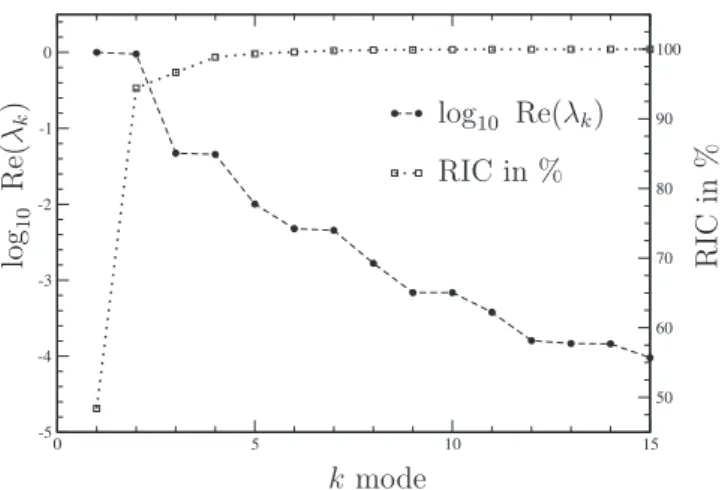
Fig. 2. POD eigenvalues and Relative Information Content (RIC). Only the first 15 modes are shown.
4. Usethegradientdeterminedintheprevioussteptoupdatethe control. Set
γ
(m+1)(
t)
=γ
(m)(
t)
+ω
(m)d(m)(
t)
whered( m) isadirectionofdescentestimatedbyaconjugategradientmethod, using
∇
γC(m)(
t)
. Hereω
(m) isthe length step determined bytheArmijomethod.
5. Repeattheprocedureuntila suitablestoppingcriterion is sat-isfied.
4. Resultsanddiscussions
4.1. Reduced-ordermodelingoftheunactuatedflow
Thetwo-dimensional,compressibleflowpastarectangular cav-ityisconsidered. Fig.1 describesthecomputational domain.The flow conditionsare foraMach numberM=0.6,length to depth ratio equal 2, a Reynolds number based on the cavity depth of Re=1500 [26].Azero-pressuregradientlaminarboundarylayeris definedatthedomaininlettoensureathicknessof
δ
=0.28Don theleft cavitycorner. A4thorder predictorcorrector schemefor both the temporal and spatial discretization asgiven in Gottlieb andTurkel [16] is used. No-slip boundary conditionsare applied along the walls. In addition, the characteristic boundary condi-tionsareimplementedtoavoidacousticwavereflectionsonopen boundaries of the computational domain and a buffer region is addedatthe outletofthedomain todamp anyresidual numeri-calwaves [25].Afterverificationofmeshconvergence,48,180cells havebeenchosenforthecomputation.AtotalofNSnap =56snapshotsuniformlysampledoverone pe-riodoftheoscillation(around2.8nondimensionaltime)aretaken afterthedecayoftransientflow. Fig.2 showsthePODeigenvalue
Fig. 3. Time evolution of the first 6 POD coefficients. Modes a 3 to a 6 are scaled up
by a factor of 4.
spectrum and the Relative Information Content (RIC) defined as RIC
(
i)
=Pij=1λ
j/PNSnap
j=1
λ
jwhereλ
jisthejthPODeigenvalue.TheconvergenceofthePODeigenspectrumisfast:6modesare suffi-cient to represent 98.5%of thetotal fluctuation enthalpy.Clearly, the firstfoureigenvalues occur inpairs ofalmostequal values,a characteristic of convection-dominated flows. Modes 5, 8 and11 are isolated in the spectrum andsplit up groups of two modes ofalmostequalenergy.Finally,startingfrommode12,modesare mergedintotripletsofsameenergy.Thecontributionofallthese higher modes is very low not only in terms of energy but also thedynamics.In Fig.3,we presentthetimeevolutionofthefirst
six temporal coefficientsak.As expected, thephase difference of the temporal modes corresponding to the paired eigenvalues is around
π/2.
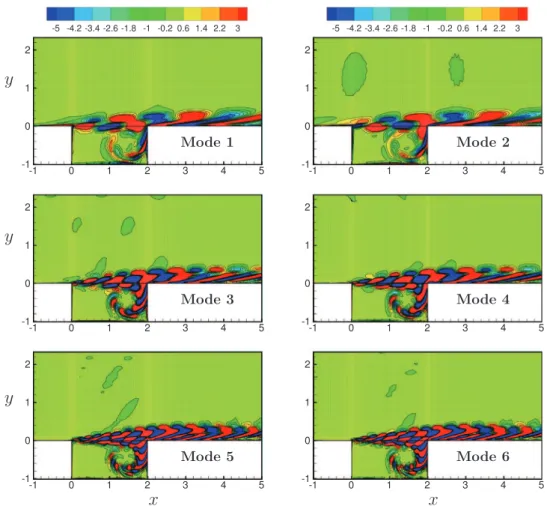
Moreover,inagreementwiththePODeigenspectrum, the fastdampingofthehighertime coefficientscan beobserved. Mode 5exhibitsadifferentdynamicbehavior, ina similarwayto modes8and11(notshownhere).Thispointremainslargely unex-plained anddeservesfurther numericalstudies.Apossible expla-nation may bea numericaladjustment ofthehigherPOD modes to better capture thelow amplitudeandlow frequency flow dy-namicsnotdescribedbythemostenergeticmodes.The vorticity contours of the first three pairs of spatial POD modes are represented in Fig. 4. As expected, a phase shift be-tween oddandeven modescan beobserved inthecavity,inthe shear layeranddownstreamofthewall boundarylayer.The spa-tial organization of mode 5 seems similar to the other modes, suggestingthat thismode providesonlyatime amplitude adjust-mentwithrespecttothereferencehigh-fidelityflowdata.Wesee that the vorticity is mainly concentrated in the shear layer, the boundary layer and the separated flow regions inside the cavity. On the downstream cavity corner, the impact of the shear layer strongly modifies the vorticity distribution along both the verti-cal and downstream horizontal wall boundary layers. Since the vorticity flux ata wall is strongly relatedto the tangential pres-suregradient,thelocalunsteadinessofthewallvorticity fluxcan be associatedtostrongpressurefluctuationsandthereforecanbe considered astheoriginofthenoise emissionatthecorner.This corresponds to thelow frequencydynamics oftheflow. The thin layer ofalternative positive andnegative vorticity,visiblejust af-ter the downstream corner (2≤x≤4), indicates the presence of a separation.A topologicalequivalence ofthemodes
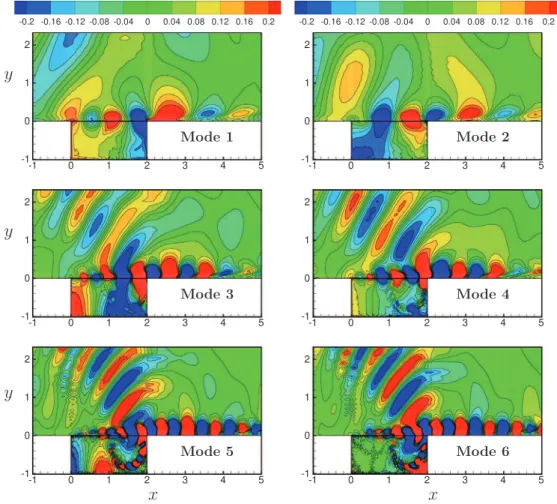
Fig. 5. Dilatation contours for the first three pairs of POD modes.
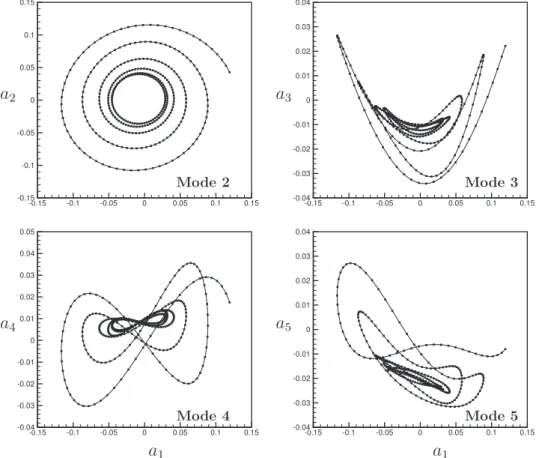
Fig. 6. Phase portraits of the first POD modes for k = 2 –6.
ing to thepaired eigenvaluesis alsoobserved.Tospatially repre-sentthehighfrequencyrange,weintroducethevolumetric dilata-tion ratedefined in2D as
∇
·u.The dilatation revealsthe direc-tivityofsoundpropagationradiatedfromthedownstreamcorner, as shownin Fig.5 forthe firstsixPOD modes. Awave propaga-tion directivity of 135° is observed as reported in Rowley et al.[30].An increase offrequencycontentwiththe PODmode num-ber isclearly visible.Itisalsoworthwhiletonotethatthe single-frequencyKelvin-Helmholtzshearlayerinstabilitiesdonotseemto contributemainlytothenoiseemission.
Fig.6 representsthephaseportraitsofthereduced-ordermodel
(4)after identification of the coefficients with the calibration
pro-Fig. 7. Time evolution of the first four temporal POD coefficients over a time win- dow greater than the one corresponding to the validity of the POD ROM. The reduced-order model diverges at t ≈ 11.
cedure described in Nagarajan et al. [26]. A very good agree-mentbetweenthetemporalcoefficientscomingfromtheidentified modelandtheonesdirectlydeterminedbyPODhasbeenobtained fora timehorizon correspondingtothesnapshotsacquisition pe-riod (not shown here). All the curves are closed, shedding light on the oscillatory characteristic of the flow. The identified ROM model isexpected to be valid over a much longer time horizon. However, as reported in Sirisup and Karniadakis [36], even with acorrectstate initializationofthereduced-ordermodel,the solu-tionmaydriftawayaftermanytimeperiods. Fig.7 illustratesthat
Fig. 8. Temporal excitation γe imposed to the cavity simulation for extracting the
POD modes used in the resolution of the optimal control problem.
theidentifiedmodelcorrectlyrepresentsthedynamicsuntiltC11 afterwhichthereisarapiddivergence.Itisnoticeablethatthe di-vergencebeginswiththehigherPODmode.Sincethetimehorizon oftheoptimalcontrolprocessisusuallymuchlargerthantheflow period, the reduced-order model has been identified for a much largertimehorizon,seeNagarajanetal. [26].
4.2. Reduced-ordermodelingfortheactuatedflow
The main difficulty of usinga reduced-order model based on PODasapproximatemodeltosolveanoptimizationproblemisthe lackofrobustness ofthemodelwhen itisusedforvaluesofthe control parameters differentthanthe onesemployedforderiving it.Twostrategiesarethenpossible.First,thereduced-ordermodel canbe derivedonceforallandusedthroughouttheoptimization process. In that case, it is necessary to give special attention to thederivationofthemodel,andmoreespeciallytothesnapshots thatareusedfordeterminingthePODmodes,seeBergmannetal.
[4]forinstance.Thesecondstrategyistoupdatethereduced-order modelsduring theoptimizationprocess.Forthat, thetrust-region properorthogonaldecomposition(TRPOD)approachcanbe imple-mentedasitwasdoneinBergmannandCordier [3].Inthispaper, we decide to follow the procedure proposed in Bergmann etal.
[4] and to derive generalizedPOD modesthat correspond to an
adhocforcingtermrichinfrequencycontent.Agoodchoiceisthe so-called”chirp” function.Mathematically,itcanberepresentedby thetemporalexcitation
γ
edefinedas:γ
e(
t)
=A1 sin(
2π
St1 t)
×sin(
2π
St3 t−A2 sin(
2π
St2 t)
)
, (13)whereA1 =0.1,A2 =27,St1 =1/60,St2 =1/30andSt3 =2/3(see
Fig. 8). A newDNS simulation is then performedwith the forc-ing
γ
e introduced at the cavity upstream corner (x/D∈Ä
c=[−0.15; −0.05]) where the flow is mostsensitive to external dis-turbances [24].Theactuationismodeledasanormalvelocity com-ponent
v
w(
x,t)
=γ
e(
t)
s(
x)
wheresisequaltoasine functionforx∈
Ä
c andzeroelsewhere.Thechoiceofasine functionforsen-suresthecontinuityofderivativeforthewallnormalvelocity.The spectrumofthechirpfunction
γ
eisshownin Fig.9.Thefrequencycontentisdetermined astheamplitudeoftheFastFourier Trans-formoftheRMSsignal.Toimprovethespectralresolution,the sig-nalisperiodizedoveratimewindowequalto20timeperiodsof
Fig. 9. Amplitude of the Fast Fourier Transform (FFT) of the temporal excitation γe .
Fig. 10. Optimized control function γopt : (a) time evolution signal and (b) ampli-
tude of the corresponding FFT.
γ
e. The frequencies vary inthe range 0.5−1.6with a dominantfrequency1 at1.5.
To compute the actuated spatial mode
ψ
, 600 snapshots are collected evenlyfromthe DNSover a non-dimensionaltime Te=30thatcorrespondstooneperiodofthechirp excitation.The op-timal control approach described in Section 3 is then solved for ℓ1 =1andℓ2 =0.Thischoice corresponds tothecasewhere the cost of the actuators is neglected. This simplification is justified
1 In our simulations, the length scales are non-dimensionalized by the cavity
depth ( D = 1 ) and the velocities by U ∞ = 1 . Therefore the term frequency and
Fig. 11. Phase portraits of the optimized controlled flow for modes 2–5 with respect to mode 1.
Fig. 12. Time evolution of the first six temporal POD coefficients obtained for the optimized control law γopt ( t ).
since we are not interested in theenergetic efficiencybutrather to attain the smallest possible value of the objective functional. The iterative algorithm described at the end of Section 3 is ap-plied with To=15. The procedure stops when the change inthe
value ofC islessthan10−5 betweentwosuccessiveiterations,i.e.
when
|
1
C(
aact ,γ
)
|
=|C
(m+1)(
aact ,γ
)
− C(m)(
aact ,γ
)
|
≤10−5 . Theconvergence is obtained after 900 iterations corresponding to a CPUtimeofaround1000s.Forthewholeoptimizationprocedure, including the generation of snapshots,the computational time is around14honanIntelXeon5670processor.Thevastmajorityof thistimeisemployedbytheDNSsimulationforproducingthe ac-tuatedsnapshots.Performinganoptimalcontrolapproachwiththe full Navier–Stokesequations andtheir adjoint would requirefew
Fig. 13. Locations of the pressure sensors inside the cavity in non-dimensional co- ordinates.
days,sincethecomputationalcostofsolvingtheadjointNSEis ap-proximatelythesameassolvingtheNSE [24].Inaddition,itshould benoticedthatthedirectstateshouldbesavedonthewholegrid atevery timesteptosolve theadjointNSE.Inconclusion,a huge savingincomputationaltime andmemoryismadewiththePOD ROMbasedoptimization.
Thetime evolution oftheoptimized controlfunction
γ
opt and its associated spectrum are plottedin Fig. 10(a) and (b), respec-tively.Theactuationtends tozeroatthe endoftheoptimization timewindow.Thisisasignthatanewconvergedstateisobtained inthephasespace(seethediscussionlater).TheoptimalsolutionFig. 14. Comparison of the non-dimensional pressure signals at various locations of the cavity between the uncontrolled flow (solid line) and optimized controlled flow (dashed line). t 0 is an arbitrary time instant.
isfoundwithinthefrequencyrangeofthetemporalexcitation
γ
e(see Fig. 9) and in the range of the expected physical flow fre-quency.Indeed,thespectrum showsthat theoptimalforcingacts atthenaturalfrequencyoftheunactuatedflowi.e.atf=0.34.Itis asiftheoptimalcontrolapproachprovidesthephysicalanti-phase control solution. Fig.12 representsthe evolution ofthe temporal coefficientsobtainedbyintegrating (7) withtheoptimizedcontrol function
γ
opt .Asexpected,asignificantreductionintheamplitudeof thetemporal modes isfound. We also observethat the mean valuesofthetimecoefficientsremainveryclosetozero.Theeffect ofthecontrollawistodecreasetheunsteadinesslevelofthestate solutionandprobablythenoiseemissionoftherealflow.
Thephaseportraitsoftheoptimizedcontrolledflowareshown in Fig. 11 for the temporal coefficients a2–a5 plotted against a1.
Clearly, the dynamics is drawn to a specified area of the phase space. This attractor corresponds to an equilibrium state of the high-fidelityforcedcavityflow.Forthisreason,theoptimized
con-trol
γ
opt can be considered effective overan infinite(large) time horizon. Themaineffectoftheactuationistodampthefirsttwo PODmodeswhicharethemostrepresentativeoftheuncontrolled flow.Unlike the Trust-region POD approach [3,13] where there is a mathematicalguarantee that the solution determined withthe POD-basedoptimalcontrolapproachconvergetotheoneobtained by the high-fidelity model, there is no such guarantee with the simpler framework developed in this paper. The optimal control law
γ
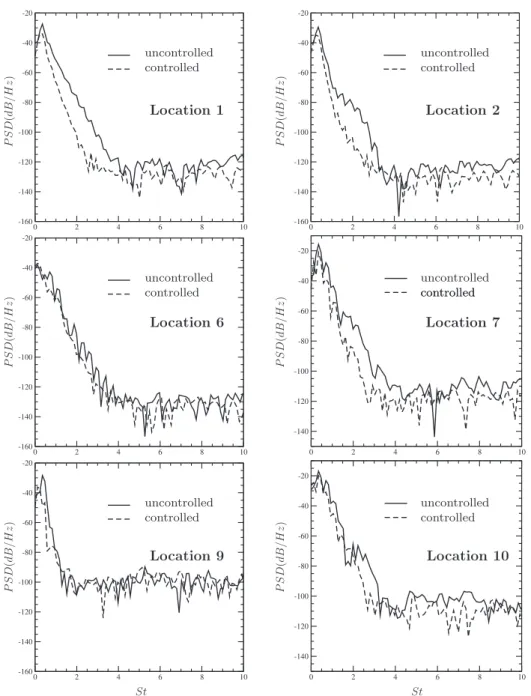
opt isthenintroducedintothenumericalsimulationtocheck not only the reduction of unsteadiness in the actuatedflow but mainlythereductionofnoiselevelsinthecavity.Fromthecareful analysisofthehigh-fidelitycontrolledsimulationsandfrom addi-tionalworknotdiscussedhere [1],anexplanationoftheactuation effectisproposed.Theunsteadyactuationislocatedverycloseto thehighestsensitivityzoneoftheflow,theupstreamcavitycorner. Bya complexbutquasi-linearreceptivitymechanism, theKelvin–Fig. 15. Comparison of Power Spectral Density (PSD) at various locations of the cavity between the uncontrolled flow (solid line) and optimized controlled flow (dashed line). The PSD is estimated with the classical Welch’s method. The time series is multiplied with an Hanning function to reduce the bias in the periodogram.
Helmholtz(KH) instabilitiesaremodified,resultinginachangeof the impingement on the downstream corner. It can be observed that the KH structures are slightly deviated downward, reducing thenumberofdirectimpactonthedownstreamcorner.Finally,all the feedbackloop mechanisminside thecavityismodified, lead-ingtoareductionoftheunsteadinessofthepressurefluctuations. At theend, itresultsinnoisereduction anda changeofthe spa-tial distributionof thelocalminimum andmaximumofpressure fluctuations of the whole flow. To emphasize this, pressure sig-nalshavebeensampledatvariouslocationsintheshearlayerand above thecavity(see Fig.13)toestimate theefficiencyofthe op-timized controllawintermsofnoiseemission. Fig.14 represents a comparisonofthenon-dimensionalpressuresignalsforthe un-controlledflowandoptimizedcontrolledflow.Atallthesensor lo-cations, the amplitudeof thepressure signals issubstantially re-ducedsuggestingthattheminimization ofthestate variables un-steadinessalsoleadtothereductionofthepressureunsteadiness. The complex time evolutionofthe fluctuationsare theresults of
thesignificantvariationsofthelocalfrequencycontent.The spec-trareportedin Fig.15 showanoveralldecreaseinsoundpressure levelinthefrequencyrangeofinterestforthisconfiguration,and specificallyaround the dominantfrequencyof
γ
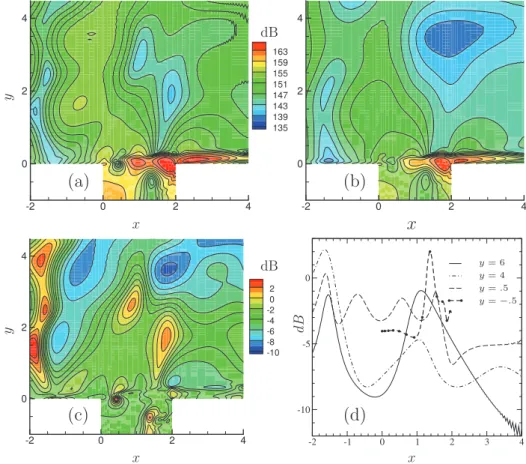
opt .An important reductionlargerthan10dBcanbeobservedinthefarfield,for in-stanceforthesensors1and2,andonalargefrequencybandwidth upto4.Forhigherfrequencies,theactuationeffectisinsignificant butthenoiselevelisalreadynegligible.Thesixthsensorislocated inthe zone of highestdirectivity (see Fig.5). The effect of actu-ationon thisparticularspectrumis lesspronounced than forthe othersensors.Thisisfurtheremphasizedin Fig.16.TheOverAllSoundPressureLevel(OASPL)fortheuncontrolled andoptimizedcontrolledflowareshownin Fig.16(a)and(b), re-spectively.The actuationeffectcanbe observedinthewhole do-main, and more especially at the downstream cavity corner and inthe zone ofhighest directivity.The variations ofOASPL linked totheintroductionoftheoptimizedactuationinthehigh-fidelity simulationareshownon Fig.16(c).Thesevariationsareestimated
Fig. 16. Contours of the Overall SPL (OASPL) levels in the most relevant part of the computational domain. (a): uncontrolled flow and (b): optimized controlled flow. The same range of contours is used for (a) and (b). (c): Difference of OASPL i.e. 1(OASPL), see the definition in the text. (d): Streamwise variations of 1(OASPL) at four vertical positions y .
Table 1
Values of 1(OASPL) in the two computational blocks. The cavity block is defined by y < 0 and the upper block by 0 ≤ y ≤ 6 and −2 ≤ x ≤ 6 . h1(OASPL) iS : spatially weighted
average of 1(OASPL); 1(OASPL) min and 1(OASPL) max : min-
imum and maximum values of 1(OASPL), respectively. Block h1(OASPL) iS 1(OASPL) min 1(OASPL) max
upper −5.28 −16.4 5.2 cavity −3.03 −4.7 4.3
as
1(
OASPL)
=OASPLopt −OASPLunc whereOASPLopt andOASPLuncstand for optimized and uncontrolled flow, respectively. Locally, near x=−2,and insome isolated areas above the cavity,an in-creaseof noise level up to 3dB isobserved. However, the domi-nanttrendisthereductionofnoiselevel.Thehighestreductionis obtainedinaslightlyinclinedbandupstreamthecavity,inthe re-giondownstreamthecavityandinthefarfieldfory>4andx>3. Toquantifyina moreglobalwaythe noisevariations induced by the control,we define forthe twocomputational blocks (cav-ity and upper block)
h
1
(OASPL)i
S, the weighted spatial averageof
1
(OASPL). The results are reportedin Table 1 with the mini-mum andmaximum valuesof1
(OASPL).The maximum increase ofnoiselevelinthecavityisquitelarge(4.3dB),comparedtothe value ofthe weighted spatial average in thisblock that is equal to −3.03dB.However, thismaximum islocalizedin a verysmall area, just in the middleof the shear layer. As statedbefore, the actuationmodifiesthe shearlayerreceptivity andthereforesome strongvariationsofnoiselevelcanbeexpectedinthisregion.The valueoftheweightedspatialaverageintheupperblockisequalto −5.28dB.Thisvalueiscombinedwitha largeamplitudeofvaria-tionof
1
(OASPL),about22dBfromminimumtomaximum.Since the noise reduction increases in the far field, extending the up-per domain usedforthe averagingwill lead toa decreaseofthe weightedspatialaveragevalue.Tofurtheranalyzethevariations ofOASPL,
1
(OASPL)are plot-ted along the streamwise direction for four values of y, seeFig. 16(d).Fory=−0.5(insidethecavity),alocal peakat3dB is trappedinthecavity,asitisclearlyvisiblein Fig.16(c).Some os-cillationsof
1
(OASPL)areobservedintheupperblock,justabove the cavity (y=0.5). Theseoscillations are dueto the shearlayer instability whichplays a crucial role inthe flow dynamic andin the flowaeroacousticasshowninthedilatationplots ofthePOD modes (Fig. 5). At larger vertical positions (y=4 andy=6), the influenceoftheKHinstabilitydisappears.Twolargepeaksemerge upstream the cavityand justat thevertical of the cavitycenter. Twolargeminimumarealsopresentatthelevelofthecavity up-streamcornerandjustabovethecavitydownstreamcorner.Atthe farfield(y=6),thenoiseleveldecreaseisbetween1dBand9dB. Far downstream the cavity,the noise level continuesto decrease but withlessermeaning, considering that thenoise levels inthe flowisnaturallylow.5. Conclusion
In this paper, we minimized the noise emitted from a low-Reynolds compressibletwo-dimensionalflowpast acavitywitha reduced-order optimalcontrolapproachbasedonPODmodes.For that, a direct numerical simulation of the compressible Navier– Stokes equationswas performedto obtain unactuated flow solu-tionsatdifferenttimeinstants.Basedonthesesnapshots,aProper OrthogonalDecompositionwasappliedtoextractdominantmodes
in terms of an inner product based on the enthalpy norm. A reduced-ordermodeloftheunactuateddynamicswasthenderived by aGalerkinprojectionoftheisentropicNavier–Stokesequations onto the first PODmodes. To improvethe long termaccuracy of thereduced-order model,an identificationprocedurewasusedto determinethecoefficientsofthemodel.Inasecondstep,this un-actuated model was augmented with a particular control input separationmethod,leadingtothedeterminationofaspatial actua-tionmode.Therobustnessofthemodeltothevariationofthe con-trolparameterswasfurtherstrengthenedbyusinganensembleof actuated snapshots corresponding to chirp-forced transients.This actuated reduced-order modelwas employed inan adjoint-based optimalcontrolapproachtominimizethetotalenthalpy unsteadi-ness. Finally, the optimized control law was introduced into the high-fidelity modelto prove the optimality interms ofnoise re-duction.Asaresult,amaximumnoisereductionof4.7dBhasbeen reachedin thecavityandmorethan 16dB atthefar-field down-stream the cavity.Locally in thenear field, some pressure waves are trapped andincreasedthenoise level withoutlarge propaga-tion.Anattempttoexplaintheeffectoftheactuationontheflow physics hasbeen proposed. Weclaim that the actuation disturbs the receptivity mechanismof the shearlayer in such a waythat the KHstructuresno longerimpact directlythedownstream cav-itycorner,reducingtheintensityofthewell-knownfeedbackloop mechanism.
Giventhelow computationalcostsneededforsolvingan opti-mization problem witha POD ROM,we can concludethat using reduced-ordermodelsforsolvingaconstrainedoptimization prob-lem isakey strategy.However, onedrawback ofthatapproachis the lackofmathematicalproof that thesolutionofthe optimiza-tionproblemwiththeapproximationmodelwillcorrespondtothe solutionoftheoptimizationproblemwiththeoriginalhigh-fidelity model.
Many directions of improvement can be considered as per-spectives. The first idea is to increase the Reynolds number and to change the cavity configuration to assess the interest of the methodformorecomplexflowconfigurations.Oneaimcouldbeto extendthemethodologytoinvestigateflowcontrolinsome three-dimensionalturbulentflows.Forthat,anumberofchallengesneed to be addressed.First, accurate 3Dsimulations ofturbulent flows with actuation effect need to be developed. Second, turbulence scalesneedtobeproperlyintroducedintothePODROM.Third,an effectivecontrolstrategyneedtobeimplementedfordetermining aphysicallyinterestingequilibriumstateofthecontrolledflow.
Further simpler improvements can be carried out. The inner productinthePODanalysisandthegoverningequationsemployed intheGalerkinprojectioncanbemodified,seeforinstanceZhang et al. [37] where a POD ROM was constructed involving primi-tive variables of the fully compressible Navier–Stokes equations. Concerning thechirp actuation law,used forextractingthe actu-ationmodeanddefiningthegeneralizedPODmodes,itsinfluence shouldbeevaluatedaswell.Thelastobviousdirectionistomodify the definitionof theobjective functionalby using another noise-related function based onthe pressure evolution ina certain re-gionofthefar-field[28,forinstance].Anotherpromisingextension ofthecurrentworkistocorrelatethenear-fieldhydrodynamicsto the far-fieldacoustics toobtainasuitable plantmodelas demon-strated inSchlegeletal. [34].Anotherpossibleextension isto ap-ply theTrust-RegionPODframework developedinBergmannand Cordier [3] forwhich thereis a mathematicalassurance that the optimal solution based on the POD ROM corresponds to a local optimizer forthe high-fidelity model. Finally,we can envision to apply amodel-freecontrolstrategybasedonGeneticProgramming [12]todetermineinanunsupervisedmanneraclosed-loopcontrol lawleadingtothemaximumnoisereduction.
Acknowledgment
L.C.acknowledgesthefundingoftheONERA/Carnotproject IN-TACOO (INnovaTiveACtuators and mOdels for flow cOntrol). The authorsappreciatevaluablestimulating discussionswithBerndR. Noackonmodel-basedcontrol.Apartoftheworkhasbeenfunded underthe ANR (grantno.ANR-08-BLAN-0115-02)(NationalFrench ResearchAgency)projectCORMORED andthe MarieCurieProject AeroTraNet. KKN and SSwould like to appreciate the support of MathurJ.S.andRameshV.ofCTFDdivisionNALfortheir encour-agementduringthecourseofthiswork.Theauthorswouldliketo acknowledgethefirstreviewerforhis/hervaluablecommentsthat greatlycontributedtoimprovethecontentofthispaper.
AppendixA. Anonconvexoptimizationapproachtohandle
theacousticterms
Tominimisetheacousticnoise one definesafunctional based onthedilatationoperatordefinedby
D : H2
(Ä)
−→R(
u,v
,c)
−→Z
Ä
(
ux+v
y)
2 dÄ
(14)Theflowfieldexpansionfortheactuatedcasecanbewrittenas
q=q+
γ
(
t)
ψ
+n
X
i=1
ai
(
t)
φ
i (15)OnapplyingtheoperatorDweobtain D
(
q)
=D(
q)
+γ
(
t)
D(
ψ
)
+ n X i=1 ai(
t)
D(
φ
i)
=P+γ
(
t)
M+ n X i=1 ai(
t)
Ni (16)Forthe optimisation problem we propose to minimisethe func-tionalgivenby ˜ J
(
a)
= Z T 0 J(
a)
dt where J(
a)
= n X i=1 ai(
t)
Ni (17)Theabovedefinitionofthefunctionalgivesthetimeaverageofthe dilatationovertheperiodofoptimization.Alsonotethattheabove definitionof our functionalis not quadratic unlike the definition wehaveusedbeforeandhencetheprocessdoes notguaranteea minimiser.Theconstrainedoptimizationcanbenowwrittenas
(
min(γ,a)J˜
(
a,γ
)
s.t. N
(
a,γ
)
=0The Lagrangian for the above problem can be defined ascan be definedbyintroducingtheadjointvariable
ξ
L
(
a,γ
,ξ
)
=J˜(
a,γ
)
−h
ξ
,N(
a,γ
)
i
=J˜(
a,γ
)
− n X i=1 Z T 0ξ
i(
t)
Ni(
a,γ
)
dt (18)minimisationoftheabovefunctionalwithrespecttothestate vari-ableagivestheadjointequations
d
ξ
i(
t)
dt =− n X i=1Ã
Li j+γ
(
t)
h2 i j+ n X i=1¡
Qjik+Qjki¢
ak(
t)
!
ξ
j(
t)
−Ni (19)withtheterminalconditiongivenby
ξ
i(
T)
=0The optimality system obtained by finding the stationary value withrespecttothecontrolparameter
γ
isgivenas1
γL= Z T 0 n X i=1 Pi∇γ
dt (20) where Pi= n X i=1Ã
h1i+ n X j=1 h2i jaj+2h3iγ
(
t)
!
ξ
i References[1]Airiau C , Cordier L . Flow control of a two-dimensional compressible cavity flow using direct output feedback law. Contrôle des décollements. Separated flow control and aerodynamic performance improvements. Cépaduès, editor; 2013 . ISBN 978-2-3649-3085-8.
[2] Benner P, Gugercin S, Willcox K. A survey of projection-based model reduc- tion methods for parametric dynamical systems. SIAM Rev 2015;57(4):483– 531. doi: 10.1137/130932715 .
[3]Bergmann M , Cordier L . Optimal control of the cylinder wake in the laminar regime by trust-region methods and POD reduced-order models. J Comp Phys 2008;227:7813–40 .
[4]Bergmann M , Cordier L , Brancher J-P . Optimal rotary control of the cylinder wake using POD reduced-order model. Phys Fluids 2005;17(9) . 097101:1–21.
[5]Bres GA , Colonius T . Three-dimensional instabilities in compressible flow over open cavities. J Fluid Mech 2008;599:309–39 .
[6]Brunton SL , Noack BR . Closed-loop turbulence control: progress and chal- lenges. App Mech Rev 2015;67:5 .
[7]Cordier L . Flow control and constrained optimization problems. In: Noack BR, Morzy ´nski M, Tadmor G, editors. Reduced-order modelling for flow control. CISM International Centre for Mechanical Sciences, 528. Springer-Verlag; 2011. p. 1–76 . ISBN 978-3-7091-0757-7.
[8]Cordier L , Abou El Majd B , Favier J . Calibration of POD reduced-order models using Tikhonov regularization. Int J Numer Meth Fluids 2009;63(2):269–96 .
[9]Cordier L , Bergmann M . Proper orthogonal decomposition: an overview. In: Lecture series 20 02-04, 20 03-03 and 20 08-01 on post-processing of experi- mental and numerical data. Von Kármán Institute for Fluid Dynamics; 2008. p. 1–46 . ISBN 978-2-930389-80-X.
[10]Cordier L , Bergmann M . Two typical applications of POD: coherent structures eduction and reduced order modelling. In: Lecture series 20 02-04, 20 03-03 and 2008-01 on post-processing of experimental and numerical data. Von Kár- mán Institute for Fluid Dynamics; 2008. p. 1–60 . ISBN 978-2-930389-80-X.
[11]Couplet M , Basdevant C , Sagaut P . Calibrated reduced-order POD-Galerkin sys- tem for fluid flow modelling. J Comp Phys 2005;207:192–220 .
[12]Duriez T , Brunton S , Noack BR . Machine learning control — taming nonlin- ear dynamics and turbulence. No. 116 in fluid mechanics and its applications. Springer-Verlag; 2016 .
[13]Fahl M . Trust-region methods for flow control based on reduced-order model- ing. Trier University; 20 0 0. Ph.d. thesis .
[14]Gloerfelt X . Compressible proper orthogonal decomposition/Galerkin re- duced-order model of self sustained oscillations in a cavity. Phys Fluids 2008;20:115105 .
[15] Gloerfelt X , Bailly C , Juvé D . Direct computation of the noise radiated by a subsonic cavity flow and application of integral methods. J Sound Vib 2003;266(1):119–46 .
[16] Gottlieb D , Turkel E . Dissipative two-four method for time dependent problem. Tech. Rep.. No. 75-22: Courant Institute of Mathematical Sciences, New-York University; 1975 .
[17] Gunzburger MD . Introduction into mathematical aspects of flow control and optimization. Lecture series 1997-05 on inverse design and optimization meth- ods. Von Karman Institute for Fluid Dynamics; 1997 .
[18] Gunzburger MD . Lagrange multiplier techniques. Lecture series 1997-05 on in- verse design and optimzation methods. Von Karman Institute for Fluid Dynam- ics; 1997 .
[19] Gunzburger MD . Perspectives in flow control and optimization. SIAM; 2003 .
[20]Holmes P , Lumley JL , Berkooz G . Turbulence, coherent structures, dynamical systems and symmetry. Cambridge University Press, Cambridge, U.K.; 1996 .
[21]Huerre P , Rossi M . Ch. hydrodynamics and nonlinear instabilities. In: Hydrody- namic instabilities in open flow. Cambridge University Press; 1998. p. 81–294 .
[22] Kalb VL , Deane AE . An intrinsic stabilization scheme for proper orthogonal de- composition based low-dimensional models. Phys Fluids 2007;19:054106 .
[23] Kasnakoglu C . Reduced-order modeling, nonlinear analysis and control meth- ods for flow control problems. Ohio State University; 2007. Ph.d. thesis .
[24]Moret-Gabarro L . Aeroacoustic investigation and adjoint analysis of subsonic cavity flows. Institut National Polytechnique de Toulouse; 2009. Ph.D. thesis .
[25] Nagarajan KK . Analysis and control of self-sustained instabilities in a cavity using reduced-order modelling. Institut National Polytechnique de Toulouse; 2010. Ph.D. thesis .
[26] Nagarajan KK , Cordier L , Airiau C . Development and application of a re- duced-order model for the control of self-sustained instabilities in a cavity flow. Commun Comput Phys 2013;14(1):186–218 .
[27]Noack BR, Morzynski M, Tadmor G, editors. Reduced-order modelling for flow control. CISM courses and lectures 528. Springer-Verlag; 2010 .
[28] Otero J.J., Sharma A.S., Sandberg R.D.. Adjoint-based optimal flow control for compressible DNS. arXiv:160305887 2016;.
[29] Perret L , Collin E , Delville J . Polynomial identification of POD based low-order dynamical system. J Turbul 2006;7:1–15 .
[30]Rowley CW , Colonius T , Basu AJ . On self-sustained oscillations in two-di- mensional compressible flow over rectangular cavities. J Fluid Mech 2002;455:315–46 .
[31] Rowley CW , Colonius T , Murray RM . Model reduction for compressible flows using POD and Galerkin projection. Physica D Nonlinear Phenom 2004;189(1–2):115–29 .
[32] Rowley CW , Williams DR . Dynamics and control of high-Reynolds number flow over cavities. Ann Rev Fluid Mech 2006;38:251–76 .
[33]Samimy M , Debiasi M , Caraballo E , Serrani A , Yuan X , Little J , et al. Feed- back control of subsonic cavity flows using reduced-order models. J Fluid Mech 2007;579:315–46 .
[34] Schlegel M , Noack BR , Jordan P , Gröschel E , Schröder W , Wei M , et al. On least-order representations for aerodynamics and aeroacoustics. J Fluid Mech 2012;697:387–98 .
[35] Sipp D, Schmid PJ. Linear closed-loop control of fluid instabilities and noise-Induced perturbations: A Review of approaches and tools. ASME Appl Mech Rev 2016;68(2):020801–020801–26. doi: 10.1115/1.4033345 .
[36] Sirisup S , Karniadakis GE . A spectral viscosity method for correcting the long-term behavior of POD model. J Comp Phys 2004;194:92–116 .
[37]Zhang C , Wan Z , Sun D . Model reduction for supersonic cavity flow using proper orthogonal decomposition (POD) and Galerkin projection. Appl Math Mech 2017;38(5):723–36 .