A RESIDUAL DENSE GENERATIVE ADVERSARIAL NETWORK FOR PANSHARPENING WITH GEOMETRICAL CONSTRAINTS
Texte intégral
Figure
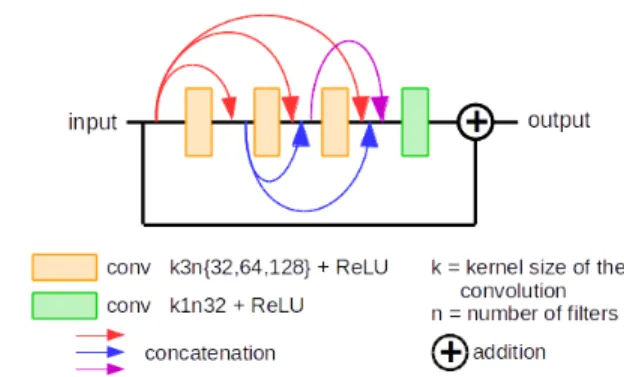
![Fig. 1: General architecture used for the generator, where the input z = [P, ↑ y] is the concatenation [.] of the panchromatic image P and ↑ y the multispectral image y = (y 1 , ..., y N ) resized to the size of P](https://thumb-eu.123doks.com/thumbv2/123doknet/14258752.489040/3.918.508.806.588.698/general-architecture-generator-input-concatenation-panchromatic-multispectral-resized.webp)
Documents relatifs
As a remedy to such problem, we propose to use the generative models which were proposed by Ian Goodfellow and al in [1] providing the AI world with a new class of Deep Learning
give an analysis of the performane of the protool in an unit graph wireless network model.. with uniform density, and in the ase of a
First, we validated networks trained on the PlantCLEF 2015 training set by evaluating them on the PlantCLEF 2015 test set using the previous year’s score metric [9].. The goal of
Stable autoregressive process, Least squares estimation, Asymptotic properties of estimators, Residual autocorrelation, Statistical test for residual correlation, Durbin-
In this example, we are concerned with the quasistatic contact between two beams, one of which being subjected to either a dead or a follower force, with a view to showing the
These pertain to the interaction of passenger traffic and vehicle traffic: vehicle seat capacity drives the internal comfort, vehicle total capacity
Angular distributions of protons, neutrons and X-rays, within the range of 20-200 keV have been obtained for the small FN-II dense plasma focus device, within the discharge
The main contributions of this paper are centred on: (a) the integration of an eigentrust-based model into the RELOAD architecture in order to assess the trust level of P2PSIP
