يملعلا ثحبلا و يلاعلا ميلعتلا ةرازو
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE MINISTERE DE L’ENSEIGNEMENT SUPERIEUR
ET DE LA RECHERCHE SCIENTIFIQUE
Année universitaire : 2018 / 2019
Université Mohamed Seddik Ben Yahia
Faculté des Sciences et de la Technologie
Département d’Electrotechnique
Mémoire de fin d’étude
En vue de l’obtention du diplôme de Master en Électrotechnique
Option : Machines électriques
THÈME
Dimensionnement et Modélisation de
la machine synchrone à aimant
permanent
Soutenu juin 2019
Présenté par : Encadré par :
Mr. Boufenar Samir Mme. Boulassel_Belli Zoubida Mr. Latreche Zakaria
REMERCIEMENTS
Tout d'abord, nous remercions le grand
Dieu qui nous a donné l'occasion de vivre cette
journée et le remercions de nous avoir donné la
force et la patience de faire ce travail.
Les remerciements sincères à Madame
BOULASSEL ZOUBIDA Née BELLI, qui a joué
un rôle important dans l’achèvement de ce
travail
Nos vifs remerciements vont également
aux membres du jury pour l’intérêt qu’ils ont
porté à notre travail en acceptant de
l’examiner et de l’enrichir par leurs
propositions.
Nos remerciements vont également à
toutes les personnes qui ont, de près ou de loin,
apporté aide et encouragement.
Enfin, un grand merci aux membres de la
famille pour leur soutien tout au long du
travail.
Je dédie ce modeste travail à :
Mes chers parents qui ont fait de
moi ce que je suis par leurs
sacrifices, à mes frères et à toute
ma famille, à tous mes amis et à
toutes les personnes qui ont
contribué de près au de loin à la
Couronnement et à la réussite de ce
travail. Et toute la promotion
2018/2019, Électrotechnique.
Je dédie ce modeste travail à :
Mes chers parents qui ont fait de
moi ce que je suis par leurs
sacrifices, à mes frères, mes sœurs
et à toute ma famille, à tous mes
amis et à toutes les personnes qui
ont contribué de près au de loin à
la Couronnement et à la réussite de
ce travail. Et toute la promotion
2018/2019, Électrotechnique.
Sommaire
I. Introduction générale...1
Chapitre I : Généralités sur les Machines synchrones à aimants
permanents
I.1. Introduction………...3
I.2 Machines synchrones à aimants permanents………..……...3
I.2.1 Les aimants permanents
...4
I.2.1.1 Définition des aimants permanents...4
I.2.1.2 Aperçu historique ...4
I.2.1.3 Propriété des aimants permanents ...5
I.2.1.4 Les différents types des aimants permanents...6
a- Aimants métalliques(ALNICO)...6
b- Aimants en ferrite...6
c- Aimants à terre rare...7
I.2.1.5 Caractéristiques principales de quelques types d’aimants………...8
I.2.2 Constitution de la machine synchrone à aimant permanent(MSAP) ...9
I.2.2.1 Rotors des machines synchrones à aimant permanent ...10
a- Machine Synchrone à aimant permanent en surface ...10
b- Machine Synchrone à aimants permanents insérés...11
c- Machine Synchrone à aimants permanents enterrés ...12
d- Machine Synchrone à aimants à concentration de flux ...12
I.3 Les avantages et les inconvénients de la MSAP...13
I.4 Les domaines d’application...14
Chapitre II : Dimensionnement et Modélisation de la Machine
synchrone à aimant permanent
II.1. Introduction ...17
II.2 Dimensionnement de la machine synchrone à aimant permanent….17
II.3 Les différentes méthodes de dimensionnement de MSAP...18
II.3.1 Première méthode ………18
II.3.2 Deuxième méthode………...………18
II.3.3 Troisième méthode ...19
II3.4 Méthode classique « calcul de LIWSCHITZ »………...………...19
II.4 Calcul des machines synchrones à aimants permanents………19
II.4.1 dimensions statoriques………...19
II.4. 2dimensions rotoriques...21
II.5 Calcul des pertes
...22II.5.1 Pertes Joules………...22
II.5.2 Pertes fer ...23
II.5.3 Pertes mécaniques ...25
II.6 Calcul de la masse du cuivre et celle du fer
...25II.7. Modélisation de la machine synchrone à aimants permanents
……...26II. 7.1 Modélisation par le calcul du champ électromagnétique...27
II.7.1.1. Equations du champ électromagnétique ...27
II.7.1.2 Les relations constitutives du milieu ...28
II.7.1.3 Formulation du modèle magnétostatique ...29
II.7.1.4 Formulation du modèle magnétodynamique...30
II.8 Résolution des équations différentielles aux dérivées partielles
…...31II.8.1 Méthodes analytiques...31
II.8.2 Méthodes semi-analytiques ... ………32
II.8.3 Méthodes numériques ...32
Chapitre III : Application et résultats
III.1 Introduction
... ...34III.2 Dimensionnement de la machine synchrone à aimants étudiée
...34III.2.1 Modèle géométrique de la machine étudiée……….35
III.2.2 Caractéristiques physiques ...36
III.2.3 Calcul du stator...36
III.2.4 Calcul de l’entrefer...37
III.2.5 Calcul du rotor………...37
III.3 Dimensions principales de la machine
...38III.3.1 Calcul des pertes par courant de Foucault dans les aimants permanents….39 III.3.2 Réduction des pertes par la technique de la segmentation des aimants…...40
III.4 Modélisation numérique par éléments finis de la machine étudiée
...41III.4.1 Segmentation des aimants pour la réduction des pertes par courant de Foucault……….………...…44
III.5 Conclusion
………...…………49Page 1
Introduction Générale
Dans ces vingt dernières années, le domaine de la conversion de l'énergie électrique a été marqué, comme de nombreux autres domaines, par la révolution de l'électronique de puissance et de la microinformatique. Historiquement, le moteur à courant continu a parfaitement assuré le fonctionnement de la plupart d'équipements industriels. Cependant, son principal défaut reste le collecteur mécanique que l'on tolère mal dans certains environnements et qui fait augmenter les coûts d'entretien. Ces contraintes ont dirigé les études vers les entraînements équipés de machines à courant alternatif [1].
Les développements récents des convertisseurs statiques, des matériaux magnétiques à faibles pertes et des aimants permanents de forte densité d’énergie ont permis une émergence des applications industrielles et domestiques utilisant des machines électriques synchrones à aimants permanents Parmi ces applications, nous pouvons citer par exemple les machines-outils, les compresseurs, les perceuses, les systèmes de génération d’énergie électrique avec des turbines à gaz, etc.
Aujourd’hui, les moteurs synchrones à aimants permanents sont recommandés dans le monde industriel. Ceci est dû au fait qu’ils sont fiables, le moteur synchrone à aimants permanents a une vitesse de rotation proportionnelle à la fréquence d’alimentation et, il est moins encombrants que les moteurs à courant continu grâce à l’élimination de la source d’excitation. Ainsi, leur construction est plus simple puisque elle ne contient pas un collecteur mécanique qui entraîne des inconvénients majeurs tels que la limitation de puissance, l’usure des balais et les pertes rotoriques, par conséquent, ceci augmente leur durée de vie et évite un entretien permanent [1].
Dans notre travail également, nous allons nous intéresser à la machine synchrone à aimants permanents, partant d’un pré-dimensionnement, sur la bas des expressions analytico-empiriques, jusqu’à une modélisation fine par la méthode des éléments finis. L’étude est dédiée au dimensionnement et la modélisation d’une machine synchrone à aimant monté en surface dans le but de prédire les pertes par courant de Foucault dans les aimants permanents, pertes qui peuvent conduire à l’échauffement de l’aimant, voir donc une désaimantation partielle ou totale irréversible de ce dernier. Dans ce travail, la technique de la segmentation des aimants pour réduire leur volume et donc les pertes par courant de Foucault sera aussi étudiée.
Page 2
Le mémoire est alors organisé en trois chapitres :
Dans le premier chapitre, et à travers une étude bibliographique, nous allons présenter un bref aperçu sur les machines synchrones à aimants permanents. Cet aperçu s’étale sur les matériaux pour aimants, structures des machines synchrones à aimant et leur domaine d’applications
Dans le deuxième chapitre, nous allons faire un dimensionnement de la machine synchrone à aimant permanent monté en surface à partir des différentes expressions analytico-empirique. Ensuit on présentera le processus de modélisation par la méthode des éléments finis.
Dans le troisième chapitre, on présentera la structure de la machine à dimensionner, les résultats du calcul de différents paramètres et les dimensions principales de la machine étudiée. Les résultats de la simulation numérique de la structure dimensionnée et l’analyse des pertes par courant de Foucault dans les aimants permanents feront part de ce chapitre. On terminera le chapitre par l’analyse de pertes et l’investigation de la technique de segmentation des aimants pour la réduction des pertes.
Page 3
I.1 Introduction
Les machines électriques se partagent en différentes classes dont on cite : les machines statiques et les machines tournantes, dans cette dernière on distingue deux familles essentielles des machines tournantes (machines à courant continu et celles à courant alternatif). Dans la classe des machines à courant alternatif, on trouve les machines synchrones et celles asynchrones. Cette classification est montrée dans la figure (I.1).
Figure I.1 : Différentes classes des machines électriques.
Dans ce travail, on s’intéresse aux machines synchrones à aimants permanents.
I.2 Machines synchrones à aimants permanents
Le terme de machine synchrone regroupe toutes les machines dont la vitesse de rotation de l’arbre de sortie est égale à la vitesse de rotation du champ tournant. Pour obtenir un tel fonctionnement, le champ magnétique rotorique est généré soit par des aimants permanents soit par un circuit d’excitation. La position du champ magnétique rotorique est alors fixe par rapport au rotor, ce qui impose en fonctionnement normal une vitesse de rotation identique entre le rotor et le champ tournant statorique [2].
Page 4
a- Les machines synchrones à rotor bobiné. b- Les machines synchrones à réluctance variable. c- Les machines synchrones à aimants permanents.
Notre intérêt va plus particulièrement vers cette dernière catégorie. Dans les machines à aimants permanents, les aimants sont situés sur la partie tournante. Le stator est constitué d’un enroulement triphasé distribué sinusoïdalement. Concernant son fonctionnement il est basé sur le principe de rotation du champ magnétique en synchronisme avec le rotor d’où le nom des machines synchrones à aimants permanents (MSAP).
Dans la plupart des applications un onduleur est nécessaire pour avoir une alimentation avec une tension et une fréquence variable, dans ces systèmes le champ tournant rotorique peut être gardé en synchronisme avec la sortie de l’onduleur pour une vitesse allant de zéro à sa vitesse maximale [3].
Les machines synchrones à aimant permanent, utilisées en mode moteurs ou génératrices, sont devenues de plus en plus attractives car elles répondent aux exigences de nouvelles technologies. L’intérêt pour ces machines est dû en grande partie à leur faible perte et à leur robustesse ainsi qu’à leur important couple massique.
Avant de passer à la présentation de ce type de machines électriques on commence tout d’abord par la présentation des aimants permanents.
I.2.1 Les aimants permanents
I.2.1.1 Définition des aimants permanents
On appelle un aimant permanent tout corps ayant la capacité ou la propriété de conserver une très grande aimantation rémanente et qui est difficile à se désaimanter lorsqu’il est aimanté [4].
Un aimant permanent est un matériau magnétique qui a la particularité d’avoir une bonne résistance à la désaimantation, c’est-à-dire une aimantation rigide qui ne varie pas obligatoirement en présence d’un champ magnétique extérieur [5].
I.2.1.2 Aperçu historique
L’aimant doit son origine au latin ADAMAS qui signifie fer, diamant [6]. Les aimants permanents ont vu le jour aux environ 600 ans avant J-C. Mais ce fut au début du
Page 5
ce siècle qu’eut lieu le véritable essor des aimants permanents qui ont pris leur place dans tous les domaines, en particulier dans les machines électriques. [7] [8].
I.2.1.3 Propriété des aimants permanents
Le choix des aimants permanents est primordial puisqu’ils interviennent beaucoup dans le couple de la machine.
Les aimants permanents sont principalement caractérisés par leurs cycle d’hystérésis et plus particulièrement par la courbe de désaimantation du deuxième quadrant du plan (B-H) comme le montre la figure (I.2), cette courbe est caractérisée par :
Figure I.2 : Courbe de désaimantation.
a- L’induction rémanente (Br), c’est -à-dire l’induction résiduelle au circuit fermé, ce qui signifie une induction de la puissance potentielle de l’aimant.
b- Le champ coercitif (Hcb), caractérise le champ démagnétisant annulant l’induction, plus sa valeur est élevée plus l’aimant est stable.
c- Produit d’énergie volumique (BH) max, ce produit est couramment appelé énergie spécifique de l’aimant ; cette énergie caractérise la qualité du matériau.
Page 6
En effet pour un entrefer donné, le volume est d’autant plus faible, que l’énergie spécifique est élevée [8].
I.2.1.4 Les différents types des aimants permanents a- Aimants métalliques (ALNICO)
Ce sont des alliages à base d’Aluminium et de Nickel, avec des additions de Cobalt, Cuivre ou de Titane. Ils sont caractérisés par un champ rémanent très élevé mais un champ coercitif très faible ce qui pose des gros problèmes de désaimantation. Les aimants ALNICO sont utilisés dans les instruments de mesure où leur grande stabilité thermique constitue un paramètre essentiel, ainsi que comme capteurs.
Figure I.3 : Aimants ALNICO.
b- Aimants en ferrites
Les ferrites sont des composants d’oxyde de Fer, de Baryum et de Strontium. Ils sont obtenus par frittage. Ils sont beaucoup plus robustes et relativement peu coûteux. Les ferrites trouvent l’essentiel de leurs applications dans les moteurs de faible puissance, utilisés dans l’industrie automobile.
Page 7
Figure I.4: Aimant ferrites.
c- Aimants terres-rares
Les Samarium Cobalt (Sm-Co)
Ils sont beaucoup plus performants et autorisent une température de fonctionnement élevée (jusqu’a 300 C°) mais ils sont très coûteux en raison de la présence du Cobalt dans leur composition. Les Sm-Co sont utilisés dans des applications particulières (télécommunication, aéronautique), dont les propriétés de haute températures et la résistance à l’oxydation sont supérieures.
Figure 1.5: Les Samarium Cobalt (Sm-Co) Néodyme-Fer-Bore (Nd-Fe-B)
Les aimants (Nd-Fe-B) ont des performances supérieures au Samarium Cobalt et ils sont beaucoup moins coûteux mais leur tenue à la température est moins bonne (jusqu’à 160 °C). Ce type d’aimant est utilisé principalement dans les
Page 8
micro-informatiques et les télécommunications. Ils constituent en particulier l’élément central des têtes de lecteurs.
Figure I.6: Néodyme-Fer-Bore (Nd-Fe-B).
I.2.1.5 Caractéristiques principales de quelques types d’aimants
La figure (I.7) présente la caractéristique de démagnétisation lorsqu’un champ extérieur est appliqué pour s’opposer à l’aimantation résiduelle pour les principaux types
d’aimants :
Page 9
On peut aussi récapituler dans le tableau (I.1) les caractéristiques des différents aimants précédents :
Tableau (1.1) : Caractéristiques des aimants [10].
I.
2.2 Constitution de la machine synchrone à aimant permanent(MSAP)
La machine synchrone est constituée de deux parties, la partie mobile ou rotor constituant l’inducteur et une partie fixe ou stator portant les enroulements constituant l’induit, la mince zone entre les deux parties précédentes est appelée l’entrefer. Stator : il est similaire à celui de la machine asynchrone. Il se compose d’un bobinage distribué triphasé, tel que les forces électromotrices générées par la rotation du champ rotorique soient sinusoïdales ou trapézoïdales. Ce bobinage est logé dans les encoches creusées dans le circuit magnétique fixe. Ce dernier est feuilleté afin de réduire les courants de Foucault et de limiter les pertes dans le fer. Il est généralement construit en tôle à base d’alliage Fer-Silicium qui permet l’obtention d’une induction élevée [10].
Rotor : les enroulements parcourus par un courant continu (dans le cas de la machine à rotor bobiné) sont remplacés par des aimants permanents alternants pôles nord et pôles sud. Le flux inducteur balaye les enroulements statoriques et y induit des forces électromotrices (f-é-m) alternatives [10]. L’interaction des champs rotorique et statorique donne naissance au couple électromagnétique.
La figure (I.8) présente une image des parties de la machine synchrone à aimant permanent (le stator et le rotor) :
Page 10
Stator Rotor
Figure I.8: Stator et rotor de la machine à aimant permanent.
I.2.2.1 Rotors des machines synchrones à aimant permanent
Les machines à aimants permanents peuvent être construites avec plusieurs configurations rotoriques. Leur classification globale en termes de placement des aimants est la suivante [11] :
Aimants en surface Aimants insérés Aimants enterrés
Aimants à concentration du flux
a- Machine Synchrone à aimant permanent en surface
Pour ce type de machines, les aimants sont placés sur le rotor, ils sont aimantés radialement. Cette configuration du rotor est la plus utilisée. Le principal avantage de la machine avec des aimants en surface est rapports couple/masse et puissance/masse élevés et très bon rendement. Donc, elles ont un faible coût de fabrication par rapport à d’autre machines à aimant.
Leur inconvénient est l’exposition des aimants permanents au champ démagnétisant. De plus, les aimants sont soumis à des forces centrifuges qui peuvent causer leur détachement du rotor. Parfois, un cylindre externe non ferromagnétique de haute conductivité est utilisé. Il protège les aimants de la désaimantation, de la réaction de
Page 11
l’induit et des forces centrifuges. Ce cylindre peut en plus fournir un couple de démarrage asynchrone et agir comme un amortisseur. Dans le cas des aimants du type terres rares la réactance synchrone dans l’axe d et l’axe q sont, pratiquement les mêmes [11] [12].
Figure I.9 : Aimant permanent monté en surface.
b- Machine Synchrone à aimants permanents insérés
Comme les machines avec aimants en surface, les aimants du type insérés sont aussi montés sur la surface du rotor. Toutefois, les ouvertures entre les aimants sont partiellement remplies avec le fer, comme il est montré dans la figure (I.10). Le fer entre les aimants permanents crée une saillance et donne un couple reluctant en plus du couple des aimants. La réactance synchrone de l’axe q est légèrement supérieure à celle dans l’axe
d [11] [12].
Page 12
c- Machine Synchrone à aimants permanents enterrés
Les machines à aimants enterrés sont des machines avec des aimants intégrés dans le rotor figure (I.11) et aimantés radialement. Du fait que la surface du pôle magnétique est plus petite que celle du rotor, l’induction dans l’entrefer est plus faible que l’induction dans l’aimant. La réactance synchrone dans l’axe d est plus petite que celle de l’axe q. Les aimants dans cette configuration sont très bien protégés contre les forces centrifuges. Cette configuration du rotor est recommandée pour les applications à grandes vitesses [11] [12].
Figure I.11: Aimants permanents enterrés.
d- Machine Synchrone à aimants à concentration du flux
Une autre façon de placer les aimants permanents dans le rotor est de les enterrer profondément à l’intérieur du rotor. Ici, les aimants sont aimantés dans le sens de la circonférence figure (I.12). Les pôles magnétiques se forment alors au niveau des parties ferromagnétiques du rotor par concentration du flux provenant des aimants permanents. L’avantage de cette configuration par rapport aux autres est la possibilité de concentrer le flux généré par les aimants permanents dans le rotor et d’obtenir ainsi une induction plus forte dans l’entrefer. Comme les machines à aimants permanents intérieurs, les aimants permanents de cette dernière sont aussi bien protégés contre la désaimantation et les contraintes mécaniques. La réactance synchrone sur l’axe q est plus grande que celle de l’axe d [11] [12].
Page 13
Figure I.12 : Machines à aimants à concentration du flux.
I.3 Avantages et inconvénients de la MSAP
La MSAP à plusieurs avantages mais aussi elle a quelques inconvénients :
a- Les avantages [13] [14] :
Avec l’avènement des matériaux à aimants permanents de grande énergie et les progrès réalisés dans le domaine de l’électronique de puissance, les machines à aimants permanents (MSAP) ont connu ces dernières années un grand essor. Elles ont été adoptées dans de nombreuses applications de hautes performances. Pour toutes ces applications, les machines à aimants permanents sont parfois préférables aux autres machines traditionnelles, telles que les machines à courant continu, les moteurs synchrones classiques et les moteurs asynchrones et en particulier pour les applications spécifiques (servomoteur à vitesse variable). A titre d’illustration, quelques avantages des machines à aimants permanents, sont cités ci-dessous :
L’absence d’enroulement rotorique annule les pertes Joules au niveau du rotor.
Le couple volumique et la puissance massique importante permettent une meilleure compacité.
L’absence des collecteurs et des balais simplifie la construction et l’entretien.
La densité du flux, relativement élevée dans l’entrefer, assure une très bonne performance dynamique.
Possibilité de supporter des surcharges transitoires importantes et un bon comportement dynamique en accélération et en freinage.
Page 14 Très bon rendement et un facteur de puissance élevé (proche de l’unité) [15].
Grande fiabilité.
Fonctionnement à très haute vitesses [15].
b- Les inconvénients [15] :
Coût élevé (à cause du prix des aimants).
Problème de tenue en température des aimants.
Risque de démagnétisation irréversible des aimants par la réaction d’induit.
Impossibilité de régler l’excitation.
Pour atteindre des vitesses élevées, il est nécessaire d’augmenter le courant statorique afin de démagnétiser la machine. Ceci entraînera inévitablement une augmentation des pertes statoriques par effet Joule.
La non-régulation de ce flux ne permet pas une souplesse de contrôle sur une très large plage de vitesse.
Influence des vibrations et des chocs sur la structure de la machine.
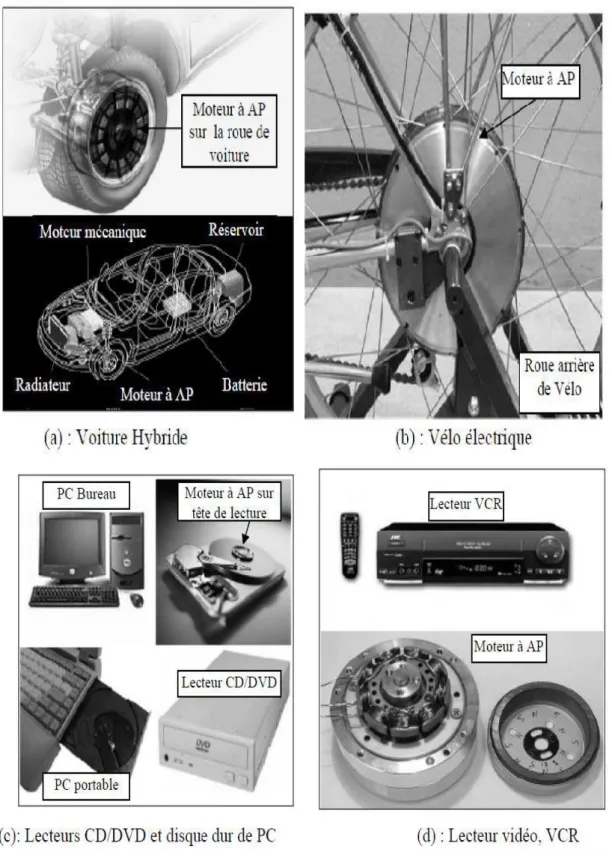
I.4 Domaines d’application
Les MSAP sont utilisées pour les entrainements qui nécessitent une vitesse de rotation constante, tels que les grands ventilateurs, les compresseurs et les pompes centrifuges, et grâce au développement de l’électronique de puissance, l’association machine à aimants-convertisseur de puissance a trouvé de nombreuses applications dans les domaines très divers tels que la robotique, la technologie de l’espace et dans d’autres applications plus particulières [16], comme :
Equipements domestiques (machine à laver le linge).
Automobiles.
Equipements d’échantillonnage de l’information (DVD drives).
Outils électriques, jouets, système de vision et ses équipements.
Equipements de soins médicaux et de santé (fraise de dentiste).
Servomoteurs.
Production d’électricité.
Propulsion des véhicules électriques et la propulsion des sous-marins.
Machines-outils.
Elles sont utilisées pour des puissances allant de la gamme des microwatts à celle des mégawatts. La figure (I.13) illustre quelques applications de ces machines. Toutefois leur domaine d’utilisation privilégié reste les puissances à quelques dizaines de Kilowatts
Page 15
ou l’aimant permanent permet d’obtenir à taille égale, une induction dans l’entrefer plus élevée que les machines à rotor bobiné [17].
Page 16
I.5 Conclusion
Dans ce chapitre nous avons présenté des généralités sur la machine synchrone à aimant permanent, les caractéristiques et les différents types des aimants permanents, qui constituent un élément fondamental pour ce type de machine, les différentes structures des aimants sur le rotor, les avantages et les inconvénients de chaque configuration et en fin les domaines d’applications de la MSAP sont abordés.
Le chapitre suivant sera consacré à la présentation des différentes démarches de conception des machines électriques, voir machines synchrones à aimants montés en surface, partant de dimensionnement classique jusqu’à la modélisation.
Page 17
II.1 Introduction
Le dimensionnement des machines électriques consiste à exploiter des équations mathématiques qui relient deux types de paramètres : Les paramètres descriptifs du système (grandeurs géométriques) et les paramètres caractérisant son fonctionnement comme les densités des courants, il faut donc tenir compte de toutes les variables qui caractérisent le fonctionnement de la machine ainsi que les contraintes liées au cahier des charges basé sur des modèles analytiques et des relations empiriques, le dimensionnement est en fait la recherche des solutions symboliques exactes des équations physiques de la machine [18].
Dans ce chapitre, nous allons présentez les différentes démarches de la conception des machines électriques, partant de dimensionnement classique jusqu’à la modélisation.
II.2 Dimensionnement de la machine synchrone à aimant
permanent
Dans le chapitre précédent, on a cité quatre structures de machines synchrones à aimants permanents qui se distinguent principalement par la géométrie du rotor. La méthode de dimensionnement du stator est la même pour toutes les structures. Bien que le calcul des dimensions du rotor dépende de la géométrie choisie, la méthode utilisée suit toujours le même formalisme. On découple les calculs du stator et du rotor. Afin de simplifier les calculs, on prend comme hypothèses que [19] :
• Les circuits magnétiques ont une perméabilité infinie. • On néglige les effets de la saturation.
On définit tout d'abord les variables d'entrées du dimensionnement. Ces variables sont fixées pour déterminer toutes les dimensions géométriques de la machine: la charge linéique au stator A , l'induction magnétique dans l'entrefer B, le diamètre d'alésage de l'entrefer D, l’épaisseur de l'entrefer mécanique e, la densité de courant au stator J, le facteur de fermeture d'encoches kbec, la longueur axiale active du
rotor L, l'épaisseur d'aimant (aimantation radiale) 𝐞𝐚𝐢𝐦, , l'induction rémanente
d'aimant Br , le nombre de phases Q,le nombre d'encoches Z , le nombre de paires de
pôles p, le facteur d'ouverture des pôles β et le coefficient de remplissage du cuivre au stator α. Les valeurs de ces variables dépendent de la structure choisie et du cahier des charges [19].
Page 18
II.3 Les différentes méthodes de dimensionnement de la
MSAP
Ils existent plusieurs méthodes pour la conception et le dimensionnement des machines électriques, c’est un domaine très vaste qui nécessite beaucoup d'approches et d’hypothèses.
La plupart des procédés disponibles dans la littérature suivent pratiquement la même démarche, la méthode en général ne change pas puisque on remarque toujours un même cheminement qui autorise le dimensionnement du stator suivi par un calcul du rotor.
Dans ce qui suit nous proposons une liste de quatre méthodes de calcul non exhaustives rencontrées dans notre recherche bibliographique [20].
II.3.1 Première méthode
Cette méthode proposée par Marcel JUFER et Jean-Claude SABONNADIÈRE, repose sur le calcul en utilisant pour commencer les formules de dimensionnement du Fer statorique ensuite ils entament le calcul rotorique : Le dimensionnement du circuit magnétique, est basé sur les contraintes suivantes [21], [22] :
- Imposer un niveau d’induction correspondant au coude de saturation de façon à limiter les chutes de potentiel et les pertes fer, tout en diminuant le volume et la masse du fer ; puis définir ce niveau d’induction par la géométrie et le principe de conservation du flux magnétique.
- Le diamètre d’alésage et la longueur active sont les dimensions caractéristiques du
processus de dimensionnement. Mais le facteur clé associé est l’induction radiale dans l’entrefer, sa distribution sera admise sinusoïdale.
II.3.2 Deuxième méthode
Cette deuxième méthode à caractère pédagogique utilisée à l’école polytechnique de MONREAL est une méthode à but didactique. La méthode suggérée offre une certaine marge de manœuvres, des compromis doivent être faits pour le choix de certains paramètres comme le diamètre d’alésage du moteur par exemple, le résultat obtenu doit quelquefois faire l’objet de changement afin de satisfaire les
Page 19
exigences visées, Cette méthode inclue aussi les dispersions dues à la disposition en biais des encoches rotoriques [21].
II.3.3 Troisième méthode
Cette méthode est utilisée pour le calcul et la conception assistée par ordinateur d’une machine à induction, elle emprunte différentes phases de calcul suivant un ordre chronologique. Cette approche est basée sur le principe de conception de G. KOUSKOFF et LIWSCHITZ. Sauf qu’on impose les données géométriques d’une machine industrielle déjà existante, comme contraintes auxquelles nous devons nous soumettre. Les résultats numériques du calcul sont comparés avec ceux donnés par la méthode des essais classiques puis traités par une analyse dynamique simulée du comportement de la machine en vue de mettre au point la corrélation et la concordance de ces résultats de conception avec ceux délivrés par le constructeur du moteur à induction étudié [21].
II.3.4 Méthode classique « calcul de LIWSCHITZ »
Cette méthode est une approche analytique qui permet le dimensionnement des différentes parties de la machine, elle est basée sur des formules empiriques et des abaques [20].
II.4 Calcul des machines synchrones à aimants permanents
Le stator d'une machine synchrone, partie stationnaire de la machine, est identique au stator des machines asynchrones. Cependant le rotor synchrone est différent de celui asynchrone. Deux types de rotors synchrones sont distingués, rotor bobiné et rotor à aimants permanents.Dans notre travail nous intéressons au deuxième type.
II.4.1 Dimensions statoriques
L'induit de la machine synchrone comporte des encoches, des dents, des becs aux extrémités des dents et une culasse ou carcasse. Les enroulements sont logés dans les encoches. Les dimensions principales du stator sont calculées comme suit :
La longueur extérieure Le sera fixée a posteriori pour chaque machine afin d’atteindre
les spécifications. Cette grandeur sera calculée à partir de la longueur active La
nécessaire [23] :
Le = La + 2 · Ltb (II.1)
Page 20
Où Ltb est la longueur d’une tête de bobine, donnée par :
𝐿𝑡𝑏 =𝜋Z. 𝑅𝑖𝑛𝑡𝑠−b2d (II.2)
Rints : rayon intérieur statorique.
bd : La largeur des dents statoriques.
Z : Nombre d’encoches.
La vitesse périphérique maximale admissible Vp et la vitesse de rotation
maximale ΩM, imposée par des considérations mécaniques, permettent de déterminer
le rayon extérieur rotorique Rextr puis le rayon intérieur statorique Rints. Bien que le
rayon extérieur rotorique soit en fait une grandeur caractéristique du rotor, elle est en fait complètement indépendante du rotor choisi et exprimée par :
VP = Rextr· ΩM (II.3)
Rints = Rextr+ e (II.4)
e : épaisseur de l’entrefer de la machine [mm].
La largeur des dents statoriques bd est déterminée à partir du rayon intérieur
statorique [23].
𝑏𝑑 = 𝐾𝑖𝑑𝑠.2𝜋𝑍 Rints (II.5)
Le coefficient kids représente un arbitrage entre les pertes Joule et les pertes
fer. Ce coefficient varie entre 0 (pas de dents statoriques) et 1 (pas de bobinage cuivre).
L’épaisseur de la culasse statorique ecs est calculée à partir de la largeur des
dents statoriques bd :
𝑒𝑐𝑠= 𝐾𝑐𝑠. 𝑏𝑑 (II.6)
Si on impose le coefficient kcs à une valeur égale à 0,5 alors le même niveau
d’induction dans les dents et dans la culasse. Il varie entre les valeurs extrêmes 0 (pas de culasse) et 1.
Pour des machines à haute vitesse et dans l’objectif de réduire les pertes fer, il peut être opportun d’augmenter kcs afin de diminuer l’induction dans la culasse et
donc les pertes fer dans cette zone de la machine. On peut ici opter pour des valeurs supérieures à 0,5 voire même supérieures à 1. Toutefois, pour ces dernières valeurs le volume de la culasse devient très important (la masse qui est contrainte par les spécifications également) et la baisse d’induction n’est plus significative.
La hauteur des dents statorique hd est calculée à partir de [23] :
Page 21 Largeur de l’encoche : 𝑏𝑍 = 𝐾𝑖𝑑𝑠∗ ((2 ∗ 𝑃)/𝑍) ∗ 𝑅𝑖𝑛𝑡𝑠 (II.8) Où : 𝑅𝑖𝑛𝑡𝑠 = D/2 (II.9) Profondeur de l’encoche : ℎ𝑧 = Rdr∗ 𝑅𝑖𝑛𝑡𝑠 (II.10)
II.4-2 Dimensions rotoriques
Comme on l'a vu au chapitre I, il existe différentes structures de rotor pour une machine synchrone et le calcul de ses dimensions dépend de la structure choisie. Le diamètre du rotor à la périphérie de l'entrefer Dr se déduit du diamètre d'alésage D et
de l'épaisseur de l'entrefer e [23].
Dr= D − 2 ∗ e (II.11)
Cas de machines synchrones à aimants en surface
L’angle d’ouverture d’un aimant 𝛂𝐚𝐢𝐦 est une fraction d’un demi-angle
polaire.
αaim = 𝐾𝑎𝜋𝑃 (II.12) Le coefficient ka varie entre 0 (pas d’aimants) et 1 (pas d’espace inter-aimants).
L’épaisseur de la frette ef est dépendante de la tenue mécanique. La connaissance de cette valeur permet de déterminer l’expression de l’épaisseur de l’aimants eaim [23]:
𝑒
𝑎𝑖𝑚=
(Rextr−ef)(1−Kcr αaim)−Rarb 1−Kcr αaim(II.13)
Avec Rarb est le rayon de l’arbre. Le coefficient kcr varie entre 0 (pas de culasse
rotorique) et 1 (induction dans la culasse rotorique égale à l’induction dans les aimants). Il permet également de calculer l’épaisseur de la culasse rotorique [23]. 𝑒𝑐𝑟 =
𝐾
𝑐𝑟∗ αaim(𝑅𝑒𝑥𝑡𝑟−𝑒
𝑎𝑖𝑚 − 𝑒𝑓) (II.14)Page 22
II.5 Calcul des pertes
En régime permanent, les rendements des moteurs électriques sont généralement très bons (supérieurs à 80 % pour les puissances supérieures à quelques dizaines de kW utilisés dans la traction automobile). Un effort constant est tout de même mené pour continuer à améliorer ces rendements dans toutes les phases de fonctionnement en diminuant les sources de pertes et en optimisant le refroidissement. Les pertes dans les machines sont de trois natures : pertes Joule ; pertes fer et pertes mécaniques [24].
II.5.1 Pertes Joules
Les pertes Joule sont les pertes dans les circuits électriques de la machine comme les enroulements d’induit, d’excitation et plus généralement dans toutes les parties conductrices traversées par des courants. En effet, tout conducteur de résistance R parcouru par un courant continu ou alternatif de valeur efficace I, subit des pertes par effet Joule de valeur [25] :
Pj = RI2 (II.15)
Telle que la valeur de R est donnée comme suite [20] : 𝑅 = ρcu∗Nspire∗Lmoy
nel∗a∗Sel (II.16)
𝜌
𝑐𝑢: Résistivité du cuivreNspire : Nombre de spires.
a :Nombres de branches parallèles de l’enroulement statorique. nel: Nombre entier de sections élémentaires du conducteur.
Sel : La section élémentaire du conducteur.
𝐿𝑚𝑜𝑦= 2 ∗ (𝑙𝑖+ 𝑙1𝑓𝑟𝑜𝑛𝑡) . (II.17) li : Longueur virtuelle du conducteur.
𝐿𝑚𝑜𝑦: Longueur moyenne d’une spire de l’enroulement du stator.
𝑙1𝑓𝑟𝑜𝑛𝑡: Longueur moyenne de la partie frontale d’une spire.
𝑙1𝑓𝑟𝑜𝑛𝑡=
(
1.16+0.14*P)*𝑏𝑚𝑜𝑦+5. (II.18) 𝑏𝑚𝑜𝑦:Largeur moyenne d’une section.Page 23
𝑡
𝑚𝑜𝑦=
𝜋(𝐷+ℎ𝑑)𝑍 . (II.20)
ℎ𝑑 : Hauteur de la dent.
D: Diamètre intérieur du stator.
𝑡
𝑚𝑜𝑦:
Pas dentaire moyen.𝑦
𝑚𝑜𝑦:
Pas moyen.𝑦
𝑚𝑜𝑦=
𝑧𝑑2∗𝑃. (II.21)
P : Nombre de paires de pôles.
Zd : Nombre des dents statoriques, égale au nombre des encoches (Z=Zd ).
II.5.2 Pertes fer
Les alliages ferromagnétiques utilisés dans les circuits magnétiques des machines électriques sont communément appelés fer, étant donné le fort pourcentage de ce dernier utilisé dans ces alliages. Lorsqu’un matériau ferromagnétique est soumis à un champ d’induction variable dans le temps, il est le siège d’une dissipation d’énergie, appelée pertes magnétiques ou pertes fer. D’après l’approche proposée par Bertotti, [26], ces pertes peuvent être décomposées en trois contributions :
Les pertes par Hystérésis,
Les pertes par courants induits (ou pertes classiques),
Les pertes excédentaires.
On s’intéresse beaucoup plus aux pertes par courants induits ou courants de Foucault. En régime dynamique, en plus des pertes en régime statique, les variations temporelles des flux induisent des forces électromotrices dans les matériaux ferromagnétiques de conductivité élevée, ces f.é.m. donnent naissance à des courants induits macroscopiques non négligeables, qui se referment dans la masse du fer dans des plans normaux à la direction du flux et qui génèrent des pertes par courants induits, appelés aussi courants de Foucault.
Dans ce travail, considérant que les tôles statoriques et rotoriques sont feuilletées, alors on ne calcul les pertes par courant induit que dans les aimants, caractérisés par des conductivités électriques élevées, ce sont de bons conducteurs, on les considère comme des conducteurs massifs.
Page 24 𝐾𝑚 =𝑤1 𝑐∗ ∫ 𝜌𝑚 𝑤𝑐 2 ⁄ −𝑤𝑐 2 ⁄ 𝐽2(𝑥)𝑑𝑥 = 𝑤𝑐2 12𝜌𝑚∗ ( 𝑑𝐵 𝑑𝑡) 2 (II.22)
m : la résistivité électrique de l’aimant.
B : Densité du flux magnétique ou induction magnétique.
Wc : La largeur du l’aimant.
L’aimant dans ce cas, est un moyen efficace, pour réduire les pertes par courants de Foucault.
La densité du flux magnétique provoquant les pertes peut être donnée par :
B(ar) = Ɓ cos(P(ar− β)) (II.23)
Où p est le nombre de paires de pôles de la machine. Dans cette équation, les deux facteurs Ɓ et β peuvent être des fonctions du temps. Les aimants sont numérotés de 1 à Np (identique au nombre de pôles 2*p), et l’axe de kth aimant posé à la coordonnée
du rotor ak.
La densité du flux magnétique était supposée constante sur la largeur de l'aimant bm.
Avec cela, l’induction magnétique de l'aimant kth peut être écrit comme suit :
Bk= B(ak) = Ɓ cos(P( ak− β)) (II.24)
Lorsque cette densité du flux magnétique est utilisée dans l’équation (II.19), la perte par courants induit par unité du volume d'aimant dans le kth aimant est
calculée par : km,k= bm 2 12ρm∗ ( d dt′(Ɓ cos(P(ak− β))))2 (II.25)
L’approximation dans cette équation est basée sur l’hypothèse que la largeur de l'aimant wc, largeur de l’aimant qui est aussi identique à l’arc du pôle, est petite.
L’expression précédente de la densité des pertes per courant de Foucault se simplifie à [29].
Pv =π2∗f2∗Bm2∗w2c
6ρm (II.26)
m : La résistivité.
wc : La largeur d’arc du pôle, ou de l’aimant Pm (segment d’aimant). Bm : La densité du flux instantanée maximale dans l’aimant.
f : La fréquence, il montre que les pertes par courants d’induit par unité du volume sont proportionnelles au carré de la largeur wc.
Page 25
Multipliant cette expression par le volume de l'aimant, on obtient les pertes totales par courant d’induit dans le kth aimant. La somme de ces pertes élémentaires,
pour chaque aimant, donne les pertes par courant induit totale dans les aimants.
II.5.3 Pertes mécaniques
Ces pertes prennent en compte tous les frottements dus à la rotation de la partie mobile de la machine. Ces pertes dans les paliers lubrifiés ont fait l’objet de nombreuses études [30].
II.6 Calcul de la masse du cuivre et celle du fer
a- Le cuivre :
La masse du cuivre se calcule par [30] :
Massecu= [π ∗ (D2fil−ret
4 ) ∗ Nbfils∗
Lspires−moy
2 ∗ Ncond−enc∗ Nbenc] ∗ Massevol−cu. (II.27)
Dfil-ret : Le diamètre du fil conducteur retenu.
Nbfils : Le nombre de fils.
Lspires-moy : La longueur moyenne d’une spire.
Ncond-enc : Le nombre des conducteurs dans une encoche.
Massevol-cu : La masse volumique du cuivre.
Nbenc : Le nombre d’encoche.
b- Le fer :
La masse du fer se calcule par [30] :
𝑀𝑎𝑠𝑠𝑒𝑓𝑒𝑟 = 𝐷𝑒𝑥𝑡2∗ 𝐿𝑓𝑒𝑟 ∗ 𝑀𝑎𝑠𝑠𝑒𝑣𝑜𝑙_𝑡𝑜𝑙𝑒. (II.28) 𝐷𝑒𝑥𝑡: Diamétre exterieur.
𝐿𝑓𝑒𝑟: La longueur du fer.
Page 26
II.7 Modélisation de la machine synchrone à aimants
Permanents
La machine synchrone à aimants permanents étudiée comporte au niveau du stator un enroulement triphasé représenté par les trois axes (A,B,C) déphasés ; l’un par rapport à l’autre, de 120 électrique (Figure II.1). Au rotor on trouve des aimants permanents assurant son excitation (flux d’excitation constant). En fonction de la manière dont les aimants sont placés, on peut distinguer deux types de rotors [31], [32], [33].
Dans le premier type, les aimants sont montés sur la surface du rotor l’entrefer sera variable à cause de l’effet de la saillance. Dans ce cas, les inductances dépendent fortement de la position de rotor.
Dans le deuxième, par contre, les aimants sont montés à l’intérieur de la masse rotorique offrant un entrefer homogène. Le moteur est appelé à rotor lisse et les inductances ne dépendent pas de la position du rotor. Dans ce travail nous avons calcul le premier type de rotor
Page 27 Le diamètre du rotor du premier type est moins important que du deuxième ce qui réduit considérablement son inertie en lui offrant dans l’entrainement des charges rapides.
Ils découlent plusieurs niveaux de modélisation liés aux hypothèses simplificatrices associées. Plus le nombre d’hypothèses est grand, plus simple sera le modèle. Cela permet une étude et une exploitation plus aisée. Ces simplifications proviennent des propriétés des machines à courant alternatif [34]. Généralement, les modèles type circuit sont basés sur les suppositions suivantes :
• La saturation est négligée, il en résulte que les inductances propres et mutuelles sont indépendantes des courants qui circulent dans les différents enroulements, ce qui permet d’avoir des relations linéaires entre les flux et les courants
• Les f.m.m. sont reparties sinusoïdalement dans l’entrefer de la machine, il y a une symétrie par rapport à l’axe magnétique des enroulements.
• La variation des résistances en fonction de la température est négligeable.
II.7.1 Modélisation par le calcul du champ électromagnétique
Avec les méthodes analytiques, la résolution des systèmes électromagnétiques ayant des caractéristiques non linéaires présente des problèmes de calcul, du fait qu’elles ne permettent pas de tenir compte des spécifications géométriques de la machine, ainsi que de la nature de ses matériaux. De nous jour, l’accroissement de possibilités de calcul et l’évolution des méthodes numériques ont permis de prendre compte des phénomènes de plus en plus complexes et de fournir des solutions satisfaisantes pour un grand nombre problèmes. La méthode des éléments finis (MEF) est l’une des méthodes numériques les plus utilisées pour le calcul de champ magnétique dans les machines électriques.
II.7.1.1 Equations du champ électromagnétique
Dans tous les problèmes qui nécessitent la détermination du champ électromagnétique qui règne à chaque instant aux divers points d’un système physique, en particulier les problèmes relatifs au calcul du champ magnétique dans les machines électriques, les équations de Maxwell ont été utilisées [35]
La loi de Faraday, le théorème d’Ampère et le théorème de Gauss ont été réunis par James Clark Maxwell (1831-1879). Ce savant a été capable de donner la formulation la plus complète de l’électromagnétisme liant les grandeurs électriques et magnétiques dans les quatre équations aux dérivées partielles suivantes : [35]
Page 28 a- Equation Maxwell-Faraday :
𝑟𝑜𝑡⃗⃗⃗⃗⃗⃗ 𝐸⃗ = ∂B⃗⃗⃗⃗⃗ ∂t (II.29)
E⃗⃗
:
Vecteur champ électrique [V/m]. B⃗⃗
:
Vecteur induction magnétique [T].b- Equation Maxwell-Ampère :
𝑟𝑜𝑡⃗⃗⃗⃗⃗⃗ 𝐻⃗⃗ = (𝑗 + ∂D⃗⃗⃗⃗⃗ ∂t) (II.30) 𝑗 : Densité de courant de conduction [A.m-2]
∂D ⃗⃗⃗⃗⃗
∂t
:
Densité de courant déplacement [A.m−2]. Cette dernière est négligeable dans lescas quasi-stationnaires (largement admis dans les machines électriques).
rot⃗⃗⃗⃗⃗ H⃗⃗ = j (II.31)
c- Equation Maxwell-Gauss:
div𝐷⃗⃗ = (II.32) D
⃗⃗ : Vecteur induction électrique [C/m2]. ρ : Charges volumiques [C.m−3].
Ajouter la simplification de charge nulle dans les conducteurs à l’approche quasi-stationnaire.
d- Equation de la conservation du flux magnétique
div𝐵⃗ = 0 (II.33)
II.7.1.2 Relations constitutives du milieu
La résolution des équations de Maxwell ne peut s’effectuer sans les relations constitutives du milieu. Une relation constitutive décrit localement le comportement des grandeurs électromagnétiques dans un matériau donné [35].
a- Relation magnétique :
Pour les aimants permanents : B⃗⃗ = μH⃗⃗ + B⃗⃗⃗ r (II.34) μ : Perméabilité magnétique absolue du milieu [H.m−1].
Avec : μ =μ0μr
μ0 est la perméabilité du vide : μ0 = 4π. 10−7[H. m−1].
Page 29
Pour les milieux ferromagnétiques : B⃗⃗ = μH ⃗⃗⃗ (II.35) Br
⃗⃗⃗ : Induction magnétique rémanente (cas d'aimants permanents) [T]
Les relations précédentes sont données dans le cas le plus général : dans un matériau ferromagnétique sans induction rémanente, le terme Br de l'équation devient
nul. Dans le cas des aimants permanents, l'induction rémanente Br s'exprime en
fonction du vecteur aimantation M⃗⃗⃗ comme suit :
B⃗⃗⃗ =μ0Mr ⃗⃗⃗ (II.36)
b- Relation électrique
Loi d’Ohm
En mouvement : 𝐽 = 𝜎(𝐸⃗ + 𝑉⃗⃗⃗⃗ 𝑑𝐵⃗ ) (II.37) Avec 𝑉⃗⃗⃗⃗ c’est la vitesse de déplacement des parties mobiles. 𝑑
𝜎 : C’est la conductivité électrique [s/m].
En absence de mouvement l’équation (II.37) devient :
𝐽 = 𝜎𝐸⃗ (II.38)
II.7.1.3 Formulation du modèle magnétostatique
La détermination du champ magnétique dans un système peut être obtenue à partir des équations de Maxwell en utilisant, soit le potentiel scalaire ou le potentiel vecteur. Le domaine d'étude contient plusieurs sources de courants, le potentiel vecteur est alors utilisé [35].
Quel que soit le vecteur A, la divergence de rotationnel de ce vecteur est toujours nulle. Sur la base de cette propriété et tenant compte de l’équation de la conservation du flux magnétique (II.33), on peut introduire la relation suivante : B⃗⃗ = rot⃗⃗⃗⃗⃗ A⃗⃗ (II.39) Où A est le potentiel vecteur magnétique.
En présence des aimants permanents, la relation des milieux magnétiques est donnée par :
B⃗⃗ = μH⃗⃗ + Br⃗⃗⃗⃗ (II.40)
Alors : H⃗⃗ = (B⃗⃗ - Br⃗⃗⃗⃗ )/ μ
Remplaçant H par son équivalent dans l’équation de Maxwell-Ampére, puis remplaçant B par son équivalent (II.30), on aboutit à l’équation différentielle aux dérivées partielles à résoudre suivante :
Page 30 rot⃗⃗⃗⃗⃗ (1 μrot⃗⃗⃗⃗⃗ A⃗⃗ ) = J+ 1 u
rot⃗⃗⃗⃗⃗ Br⃗⃗⃗⃗ (II.41)
II.7.1.4 Formulation du modèle magnétodynamique a- Cas général :
Si le cas de dispositif alimenté par des sources de courant ou tension variables
dans le temps «
∂B
⃗⃗
∂t ≠ 0 », donc les champs E⃗⃗ et H⃗⃗ sont couplés par la loi de
Maxwell-Faraday [36]. 𝐵⃗ = 𝑟𝑜𝑡⃗⃗⃗⃗⃗⃗ 𝐴 Alors :
𝑟𝑜𝑡⃗⃗⃗⃗⃗⃗ 𝐸⃗ = −∂t∂𝑟𝑜𝑡⃗⃗⃗⃗⃗⃗ 𝐴 = 𝑟𝑜𝑡⃗⃗⃗⃗⃗⃗ = −∂A⃗⃗⃗⃗⃗ ∂t (II.42) Quel que soit le potentiel scalaire v, la relation suivante est vérifiée
rot⃗⃗⃗⃗⃗ grad⃗⃗⃗⃗⃗⃗⃗⃗⃗ v = 0. (II.43) Dans ce cas v est un potentiel scalaire électrique
Alors on peut mettre :
rot⃗⃗⃗⃗⃗ E⃗⃗ = rot⃗⃗⃗⃗⃗ = −∂A⃗⃗⃗⃗⃗⃗ ∂t = rot⃗⃗⃗⃗⃗ (−∂A⃗⃗⃗⃗⃗⃗ ∂t − grad⃗⃗⃗⃗⃗⃗⃗⃗⃗ v). (II.44) On obtient :
E⃗⃗ = −∂A⃗⃗⃗⃗⃗⃗ ∂t − grad⃗⃗⃗⃗⃗⃗⃗⃗⃗ v. (II.45)
b- Cas des courants induits:
J = J induit. (II.46) J induit = σE. (II.47)
σ : La conductivité électrique.
Alors
rot⃗⃗⃗⃗⃗ H⃗⃗ = J induit. (II.48) Où Jinduit est exprimé en termes de deux potentiels, vecteur magnétique et scalaire
Page 31
J induit= − б[∂A⃗⃗⃗⃗⃗⃗ ∂t
+
grad⃗⃗⃗⃗⃗⃗⃗⃗⃗ v]. (II.49) On arrive à l’équation différentielle du champ suivante :rot⃗⃗⃗⃗⃗ (1 μrot⃗⃗⃗⃗⃗ A⃗⃗ ) + б ( ∂A
⃗⃗
∂t + grad⃗⃗⃗⃗
v) = 1 μrot⃗⃗⃗⃗
Br⃗⃗⃗⃗ (II.50)c- Cas d’un régime harmonique (sinusoïdal) :
En régime sinusoïdal le matériau possède des caractéristiques linéaires : ∂A∂t = jwA. (II.51) w = 2πf. (II.52) Alors :
∂A∂t = j2πfA. (II.53) Donc :
rot⃗⃗⃗⃗⃗ (v rot⃗⃗⃗⃗⃗ A⃗⃗ ) + jσwA⃗⃗ + σgrad⃗⃗⃗⃗⃗⃗⃗⃗⃗ v = 0. (II.54)
II.8 Résolution des équations différentielles aux dérivées
Partielles
Plusieurs méthodes peuvent être utilisées pour résoudre les EDP du champ électromagnétique. Elles sont classées en trois grandes familles : analytiques, semi-analytiques et numériques.
II.8.1 Méthodes analytiques
Plusieurs méthodes peuvent être utilisées pour résoudre une EDP, parmi elles on peut citer la méthode de la solution générale et la méthode de séparation des variables. Ces méthodes consistent à transposer une EDP en équations aux dérivées ordinaires (EDO). La première méthode consiste à déterminer d’abord la solution générale puis la particulariser en utilisant les conditions aux limites. La seconde méthode consiste, par contre, à rechercher des solutions particulières puis les combiner pour retrouver la solution du problème. La méthode de séparation des variables, encore appelée méthode de Fourier, est la plus utilisée à cause de sa simplicité. Elle est résumée comme suit [37] :
Page 32
Indépendante U ( x1,x2 ,…. ,xd )=U1 (x1 )U2 (x2 )...Ud (xd ) puis substituer cette
solution dans l’EDP pour aboutir à des EDOs à une seule variable.
2- Résoudre chaque EDO séparément puis déterminer la solution finale en combinant les solutions séparées.
La quasi-totalité des méthodes analytiques sont limitées aux problèmes linéaires en mono ou bidimensionnel.
II.8.2 Méthodes semi-analytiques
Les méthodes semi-analytiques ne ressoudent pas directement l’équation de diffusion électromagnétique car elles font usage à l’expression analytique du potentiel vecteur magnétique donnée par la formule de Biot et savart. Cette classe de méthode reste limitée, car elle est exploitée dans le cas des milieux linéaires seulement [37].
II.8.3 Méthodes numériques
Plusieurs méthodes existent, telles que les éléments finis (MEF), les volumes finis (MVF) et les différences finies (MDF). Ces méthodes permettent de changer une EDP en un système d’équations algébriques linéaires ou non-linéaires.
Dans notre travail de modélisation, nous intéressons à la méthode des éléments finis.
Méthode des éléments finis :
Le principe du calcul par éléments finis est de diviser la structure de la machine étudiée en un nombre important d'éléments de dimensions finies puis de résoudre les équations de Maxwell sur chacun de ces éléments. Les conditions aux limites de chaque élément sont fixées par les éléments voisins. La combinaison de tous ces éléments de calcul permet alors de connaître l'état magnétique de la structure complète et donc d'effectuer des calculs du flux, de force, et d'inductance....
La méthode des éléments finis discrétise une formulation intégrale de l'équation aux dérivées partielles pour conduire à un système d'équations algébriques qui fournit une solution approchée du problème étudié. Le domaine d'étude est décomposé en un nombre fini d'éléments qui forment le maillage. La valeur du potentiel vecteur est déterminée sur tous les sommets des éléments (les sommets sont appelés les nœuds du maillage) [38].
Page 33
II.9 Conclusion
Dans ce second chapitre, on s’est intéressé au dimensionnement des machines synchrones à aimant permanent monté en surface, sur la base d’une méthode analytico-empirique, ainsi qu’au calcul des pertes par courant de Foucault dans les aimants permanents. La modélisation des machines électriques par le calcul du champ et les différentes méthodes de résolutions des équations différentielles aux dérivées partielles du champ sont également présentées dans ce chapitre.
Page 34
III.1 Introduction
Le fonctionnement des machines électriques est directement lié à la distribution des lignes du champ magnétique au sein de leur structure. La connaissance de cette distribution permet de déterminer les grandeurs nécessaires à leur dimensionnement ou l’évaluation de leurs performances comme le flux, le couple électromagnétique, les pertes...etc.
A partir de la connaissance des valeurs de ce potentiel aux nœuds du maillage, nous pouvons calculer les autres grandeurs électromagnétiques, telle que l’induction magnétique B et aussi les pertes dans les aimants.
Dans le présent chapitre, nous effectuons un pré-dimensionnement d’une machine synchrone à aimants permanents montés en surface. Les dimensions principales du stator ainsi que celles du rotor sont déterminées par des expressions analytiques. Nous intéressons également au calcul des pertes par courants de Foucault dans les aimants permanents. Au début, un calcul analytique de ces pertes a été mené, où on les a évaluées en fonction du volume de l’aimant. Ensuite, une modélisation numérique par la méthode des éléments finis de la structure dimensionnée a été réalisée. La connaissance du champ nous a permis le calcul des pertes dynamiques dans les aimants permanents. L’effet de la segmentation des aimants ou autrement dit de la réduction du volume de l’aimant sur les pertes par courant de Foucault a été aussi considéré par le modèle numérique.
III.2 Dimensionnement de la machine synchrone à aimants
étudiée
Soit une machine synchrone à aimants permanents, constituée de trois phases au stator et des aimants permanents au rotor avec 2 paires de pôles. Les données fondamentales de la machine sont les suivantes :
Fréquence F=50 Hz.
Vitesse maximale Wm=1500 tr/min.
Nombre de paire de pôle P=2.
Nombre d'encoches Z=24.
Nombre des phases Q=3.Page 35
Nombre de spires (Nspire) = 100 spires.
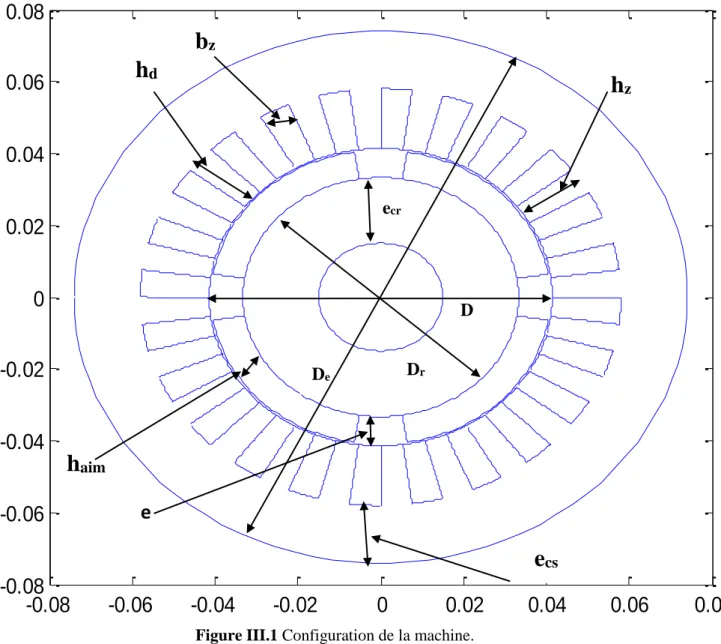
Rarb= 15*10^-3 [m], rayon de l’arbre.III.2.1 Modèle géométrique de la machine étudiée
La configuration de la machine avec ses différentes régions constitutives est présentée dans la figure (III.1)
La région (1) : le noyau polaire. La région (2) : la culasse statorique. La région (3) : les encoches statoriques. La région (4) : l’entrefer.
La région (5) : les aimants permanents.
Les encoches de la machine étudiée sont des encoches complètements ouvertes avec une section droite. La figure (III.2) présente l’encoche statorique considérée.
Figure III.1 Différentes régions constitutives de la machine étudiée
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
3 5 4 1 2Page 36
Figure III.2 Encoche statorique ouverte à section droite.
III.2.2 Caractéristiques physiques a- Partie rotorique
Les aimants sont des terres rares de type Néodyme-Fer –Bore, caractérisés par : -Induction rémanente vaut : Br= 1.15 [Tesla].
- Aimantation radiale.
-Une perméabilité relative: 𝜇r= 1.
-Une conductivité électrique σ=7.105[Ω.m]-1
Matériaux ferromagnétiques doux du noyau polaire ayant une perméabilité relative : 𝜇r= 500.
b- Partie statorique
La culasse statorique est du même matériau magnétique que le noyau polaire.III.2.3 Calcul du stator
Largeur de l’encoche bz :
bz ≈ 7*10^-3 [m].
Où Rints = 41.4*10^-3 [m]. Profondeur de l’encoche hz :
hz ≈ 17*10^-3 [m].
L’épaisseur de la culasse statorique ecs est calculée à partir de la largeur des dents
statorique:
ecs ≈ 7*10^-3 [m].
La largeur des dents statorique lds est déterminée à partir du rayon intérieur statorique :
l ds≈ 7*10^-3 [m].
hz
Page 37
Dans le cas des encoches utilisées, encoche ouverte ç section droite, la largeur des dents est identique à celle des encoches, alors lds = bz
La hauteur des dents statorique hd est calculée à partir de :
hd = 11.97*10^-3 [m]. Où :
Rextr est le rayon extérieur de la machine égal à : 60*10^-3 [m], on va le prendre
74*10^-3[m].
II.2.4 Calcul de l’entrefer
Pour estimer l’épaisseur de l’entrefer e, on a les considérations suivantes : Induction de saturation de la machine Bs=2 [tesla].
Nombre des phases Q=3.
Nombre des conducteurs Z1=124.
Le courant nominal de la machine I=93 [A]. Pas polaire :
𝜏𝑝= ((pi*D) / (2*P)) = 0.065 [s]. D= (𝜏𝑝*(2*P) / π) = 82.8*10^-3 [m]. A= ((Q*Z*I) / (pi*D)) = 1.694*10^5 [A/m]. A : la charge linéique.
e =3*(A/Bs)*Tp*10^-7 = 0.3 [mm].on va le prendre 0.5 [mm].
III.2.5 Calcul du rotor
Le diamètre du rotor à la périphérie de l'entrefer Dr se déduit du diamètre d'alésage D
et de l'épaisseur de l'entrefer e :
Dr = 66.1*10^-3 [m].
L’angle d’ouverture d’un aimant αaim est une fraction d’un demi-angle polaire.
αaim = 1.2566 [rad].
Le coefficient ka varie entre 0 (pas d’aimants) et 1 (pas d’espace inter-aimants).
L’expression de l’épaisseur d’aimants 𝐞𝐚𝐢𝐦 : eaim = 6.7*10^-3 [m].
Page 38
L’épaisseur de la culasse rotorique 𝐞 𝐜𝐫 :
e cr=18.3*10^-3 [m].
III.3 Dimensions principales de la machine
Les dimensions calculées dans les trois sections précédentes sont récapitulées dans le tableau III.1.
Tableau III.1 : Dimensions principales de la machine
Nombre de phases (Q) 3
Nombre de paires de pôles (p) 2
Nombre d’encoches par pole et par phase (q1) 2
Nombre d’encoches statoriques (Z) 24 Rayon intérieur du rotor (Rintr) en [m] 33.3*10^-3
Rayon intérieur du stator (Rints) en [m] 41.4*10^-3
Rayon max de rotor +hauteur de l’aimant (haim) en [m] 40.5*10^-3
Rayon extérieure de la machine (Rextr) en [m] 74*10^-3
Rayon extérieure des encoches (R) en [m] 58.5*10^-3
Rayon d’arbre (Rarb) en [m] 15*10^-3
Profondeur de l’encoche (hz) en [m] 16.65*10^-3
Epaisseur de la culasse statorique (ecs) en [m] 6.62*10^-3
Epaisseur de l’entrefer (e) en [m] 2.51*10^-4 Hauteur de l’aimant (haim) en [m] 6.68*10^-3
Largeur de la dent (bd) en [m] 6.76*10^-3
Hauteur de la dent (hd) en [m] 11.97*10^-3
Page 39
La configuration de la machine avec ses paramètres géométriques calculés est présentée dans la figure III.1.
Figure III.1 Configuration de la machine.
III.3.1 Calcul des pertes par courant de Foucault dans les aimants permanents
La densité de perte par courants de Foucault par unité de volume, souvent appliquée à un conducteur de faible largeur (tôle mince), est donnée par la formule analytique suivante [29] :
6 2 2 2 2w
B
f
m c PAvec : ρ est la résistivité du conducteur ; wc est la largeur du conducteur ; Bm est la densité du
flux magnétique instantanée maximale dans le conducteur et f la fréquence.