Tactical Strategies to Search for
Scarce Resources
by
Kevin Spieser
Submitted to the Department of Aeronautics and Astronautics
in partial fulfillment of the requirements for the degree of
Doctor of Philosophy
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
October 2014 [PeoV
2\Z]
@
Massachusetts Institute of Technology 2014. All rights reserved.
Signature redacted
Author...
Department of Aeronautics and Astronautics
October 7, 2014
Certified by...
Certified by...
Certified by...
Signature redacted
Emilio Frazzoli
Professor of Aeronautics and Astronautics
Thesis Supervisor
Signature redacted.. ... .. .... . . . .
Iatrick Jaillet
Professor of Electrical Engineering
Corpmittee Member
Signature redacted
Hamsa Balakrishnan
Associate Professor of Aeronautics and Astronautics
Accepted by ...
FN
Committee Member
...
Signature redacted ...
Paulo C. Lozano
Associate Professor of Aeronautics and Astronautics
Chair, Graduate Program Committee
Lf
Cow-Path Games: Tactical Strategies to Search for Scarce
Resources
by
Kevin Spieser
Submitted to the Department of Aeronautics and Astronautics on October 7, 2014, in partial fulfillment of the
requirements for the degree of Doctor of Philosophy
Abstract
This thesis investigates search scenarios in which multiple mobile, self-interested agents, cows in our case, compete to capture targets.
The problems considered in this thesis address search strategies that reflect (i) the need to efficiently search for targets given a prior on their location, and (ii) an awareness that the environment in which searching takes place contains other self-interested agents. Surprisingly, problems that feature these elements are largely under-represented in the literature. Granted, the scenarios of interest inherit the challenges and complexities of search theory and game theory alike. Undeterred, this thesis makes a contribution by considering competitive search problems that feature a modest number of agents and take place in simple environments. These restrictions permit an in-depth analysis of the decision-making involved, while preserving inter-esting options for strategic play. In studying these problems, we report a number of fundamental competitive search game results and, in so doing, begin to populate a toolbox of techniques and results useful for tackling more scenarios.
The thesis begins by introducing a collection of problems that fit within the com-petitive search game framework. We use the example of taxi systems, in which drivers compete to find passengers and garner fares, as a motivational example throughout. Owing to connections with a well-known problem, called the Cow-Path Problem, the agents of interest, which could represent taxis or robots depending on the scenario, will be referred to as cows. To begin, we first consider a one-sided search problem in which a hungry cow, left to her own devices, tries to efficiently find a patch of clover located on a ring. Subsequently, we consider a game in which two cows, guided only by limited prior information, compete to capture a target. We begin by considering a version in which each cow can turn at most once and show this game admits an equi-librium. A dynamic-programming-based approach is then used to extend the result to games featuring at most a finite number of turns. Subsequent chapters consider games that add one or more elements to this basic construct. We consider games
where one cow has additional information on the target's location, and games where targets arrive dynamically. For a number of these variants, we characterize equilib-rium search strategies. In settings where this proves overly difficult, we characterize search strategies that provide performance within a known factor of the utility that would be achieved in an equilibrium.
The thesis closes by highlighting the key ideas discussed and outlining directions of future research.
Thesis Supervisor: Emilio Frazzoli
Title: Professor of Aeronautics and Astronautics
Committee Member: Patrick Jaillet Title: Professor of Electrical Engineering
Committee Member: Hamsa Balakrishnan
Acknowledgments
This thesis has been a long time in the making. As with many lengthy endeavors, the road has not always been smooth. However, it is also true that, looking back, I am grateful for the experience, the knowledge gained, the doors that have been opened, and the many acquaintances and friends made along the way. Of course, I am also very appreciative of the frequent encouragement and timely distractions provided by those that have seen me through this degree.
My advisor, Emilio Frazzoli, afforded me tremendous freedom to pursue a wide-range of research topics throughout my studies. This flexibility to think freely across a breadth of problems not only kept my work engaging, but also made me a more independent, well-rounded, and all together better researcher. I must also point out the opportunities I had to visit NASA Ames in California, SMART in Singapore, as well as the various venues at which I have been fortunate enough to present my research. He helped make all of these ventures possible. Finally, as I got off to somewhat of a rocky start at MIT, I owe him a special thanks for sticking with me.
The remaining members of my thesis committee, Professors Patrick Jaillet and Hamsa Balakrishnan, have provided thoughtful commentary and a fresh perspective on my research during our meetings and the writing of this document. I am grateful for their time and feedback.
Lastly, I have seen many fellow lab mates come and go in my time at MIT. I have taken classes and collaborated on research projects with a number of these individuals. Their assistance with solving homework problems, studying for exams, marking exams, writing papers, re-writing papers, and brainstorming ideas is much appreciated. These interactions have been one of the defining features of my graduate school experience. I hope that, on the whole, they have found my contributions to these efforts as insightful and formative as I have found theirs. Thank you!
Sincerely, Kevin Spieser
This thesis is dedicated to Briggs and my parents.
Contents
1 Introduction 21 1.1 M otivation . . . . ... . . . . 22 1.2 Contributions . . . . 27 1.3 O rganization . . . . ... . . . . 28 2 Background Material 31 2.1 Search Theory: An Introduction . . . . 322.2 Probabilistic Search . . . . 34
2.2.1 Search with an imperfect sensor . . . . 35
2.2.2 Search with a perfect sensor . . . . 37
2.3 Pursuit-evasion games . . . . 39
2.4 Persistent planning problems . . . . 42
3 Mathematical Preliminaries 45 3.1 G am e theory . . . . 45
4 The Cow-Path Ring Problem 51 4.1 Introducing The Cow-Path Ring Problem . . . . 51
The number of turns in the CPRP . . . .
An iterative algorithm for s* . . . . A direct algorithm for finding s* . . . . Summary of the CPRP . . . .
Cow-Path Ring Game
Adding a second cow to the ring . . . . A model for informed cows . . . . Defining the Cow-Path Ring Game . . . . . A remark about Cow-Path games on the line CPRG-specific notation and terminology . . Search strategies in the CPRG . . . . The one-turn, two-cow CPRG . . . . 1T-CPRG: computational considerations . . The 1T-CPRG for different cow speeds . . . Finite-turn CPRGs . . . . Summary of the CPRG . . . .
6 Games with Asymmetric Information: Life 6.1 Searching with asymmetric information:
a motivating example . . . . 6.2 Supplementary notation and terminology . . 6.3 Information models for situational awareness 6.4 Behavioral models for asymmetric games . .
as a Cow Gets Harder
6.5 A bound on the maximum number of turning points in the CPRG 4.3 4.4 4.5 4.6 5 The 5.1 5.2 5.3 5.4 5.5 5.6 5.7 5.8 5.9 5.10 5.11 58 59 64 64 67 . . . . 67 . . . . 68 . . . . 70 . . . . 71 . . . . 72 . . . . 74 . . . . 74 . . . . 83 . . . . 84 . . . . 84 . . . . 87 91 92 93 93 95 95
6.6 CPRGs with asymmetric information . . . . 99
6.7 AI-CPRGs with perfect knowledge . . . . 99
6.8 Socially Optimal Resource Gathering . . . . 105
6.9 Conclusions . . . . 112
7 Dynamic Cow-Path Games: Search Strategies for a Changing World113 7.1 A motivation for dynamic environments . . . . 114
7.2 Dynamic Cow-Path Games with target transport requirements . . . . 115
7.3 Greedy search strategies for the DE-CPRG . . . . 118
7.4 Equilibria utilities of cows in the DE-CPRG . . . . 120
7.5 An aggregate worst-case analysis of greedy searching . . . . 123
7.6 Conclusions and Future Directions . . . . 134
List of Figures
1-1 Depiction of real-world scenarios where agents compete, against one another, to capture targets given limited information on the location of targets. (a) Snapshot of taxi operations in Manhattan. In busy urban cities, the operation of taxi drivers trying to find passengers can be represented as a competitive search game. (b) A sunken treasure ship wrecked along a coral reef. The exploits that result from two rival recovery boats each trying to find the ship using a crude sonar map of the area constitutes a competitive search game. (c) A Kittyhawk P-40 that crash-landed in the Sahara desert during World War II. In the event rescue and enemy forces had some idea of the aircraft's lo-cation, e.g., from (intercepted) radio communications, and had each party launched a recovery operation, the resulting race to locate the plane would be a competitive search game. . . . . 26
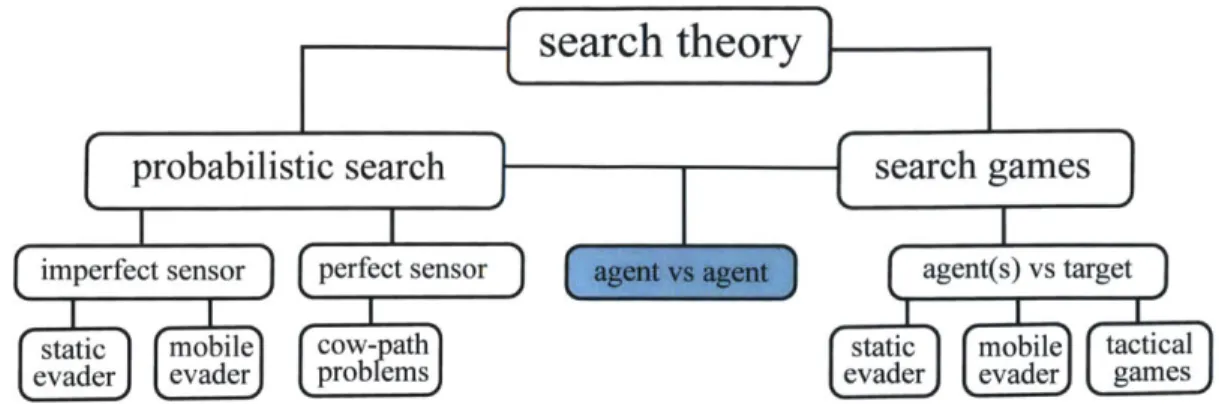
2-1 A partial taxonomy of select sub-disciplines within the field of search theory. It is worth reinforcing that the families of games represented are only a relevant sampling of select research areas in the field, and not an exhaustive listing. The box shaded in blue represents agent-vs-agent or competitive search games, the class of problems that will be the focus of this thesis. The location of CSGs in the tree indicates these problems share fundamental attributes with probabilistic search problems and pursuit-evasion search games. The image was inspired by similar figures reported in [17], [33]. . . . . 34
2-2 Illustration of the key features of the stochastic or average case Cow-Path Problem. Starting from the origin, the cow explores R in search of clover W. A hypothetical search plan is shown in gray. In the instance depicted, the cow makes four turns before finding the target at the point marked with a red exclamation mark. . . . . 38
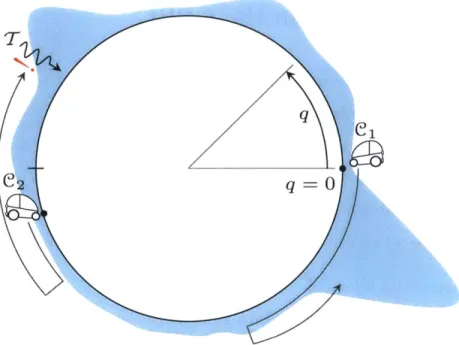
4-1 A visualization of the Cow-Path Ring Problem. The target density,
f
, as a function of radial position q, is shown in blue. In the instance depicted, the target, 7, is located on the North-West portion of 'Z. In the search plan shown, the cow (yellow triangle) travels in the ccwdirection toward q1, where, having not found 7, she reverses direction, and travels in the cw direction toward q2. Upon reaching q2, having
still not found T, she again reverses direction and continues searching in the ccw direction until ultimately finding 7 at the site indicated with a red exclamation mark. . . . . 55
5-1 A visualization of the Cow-Path Line Game. The target density, fT,
is shown in blue. The unique equilibrium search strategy of each cow, s* = (9, 9), is indicated by a directed gray line. Under s*, Ci heads toward
eCi
and, just before meeting, reverses direction and visits any previously unexplored territory. . . . . 725-2 An instance of the CPRG illustrating the initial positions and initial headings of cows C1 and C2. The trajectories of both cows, right up to the point of capture, are shown in dark gray. The target density f achieves a global maximum in [-7r/4, 0]. In the instance shown, 7 is located along the North-West portion of 'Z. The site at which 7 is found, in this case by C2, is indicated with a red exclamation mark. . 73
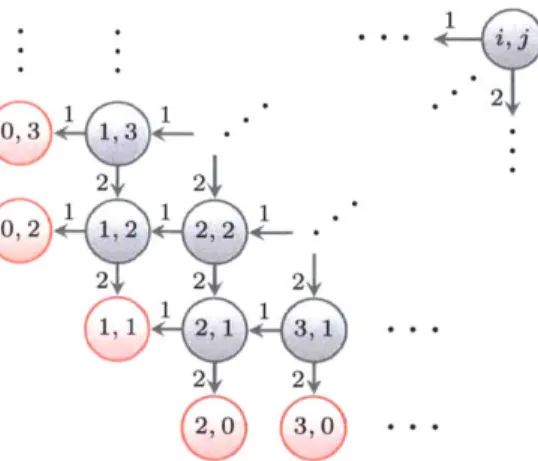
5-3 A diagram showing associations between families of finite-turn CPRGs. The node labelled with the pair (i,
j)
denotes the family of games in which C1 and C2 may turn up to i andj
times, respectively. The numbers above and beside the arrows indicate which cow turns to bring about the indicated transition. The nodes representing base case games, for which equilibria strategies may be found using the methods discussed in previous sections, are colored in red. The nodes represent-ing all other games are colored in gray. The arrows indicate how one family of games reduces to a simpler family of games when a cow turns. For example, the (2,2)-CPRG becomes an instance of the (1,2)-CPRG when C1 turns, and an instance of the (2, 1)-CPRG when C2 turns. . . 886-1 Visualization of the functionality of notation used for describing subre-gions of 'Z and one point relative to another on 'Z. Due to the circular topology of 'R, there is flexibility in the notational system. For
ex-ample, [qi, q2]c. and [q2, qi]cc. refer to the same arc of R. Similarly,
(q3 + x)c. and (q3
+
27r - x)c, refer to the same point on 'Z. . . . . . 94 6-2 Initial positions, qi(0); initial headings,#j(0);
and target priors,f7;
of C1 and C2 for an instance of an AI-CPRG. (a)
f7,
shown in blue, has local maxima along the South-East and North-West regions of 'Z. (b)f2,
shown in green, is more evenly distributed and contains three modest peaks along 'Z. For qE 'Z such that ff(q)
$
f2(q), C1 and C2 have different valuations for visiting q first. . . . . 100 6-3 An instance of an AI-CPRG. The cows (depicted as cars) C1 and C2 areinitially diametrically opposed at the top and bottom of 'R, respectively. C1's prior on T, namely f1j, is shown in blue. Owing to
ff,
C1 is motivated to, if possible, be the first cow to explore segments 'Z 1 and'R2. Shown in green, it is assumed that f2(q) = 1, Vq E 'R, such that
any two segments of 'Z having equal length are equally valuable to C2. The points a, b, c, d, e,
f
and g are points of interest in Example 6.3. . 1026-4 Visualization of key quantities used in the proof of Theorem 6.5. The points labelled 1, 2, and 3 in red correspond to the three points visited by C1 in 6.14. In the instance shown, d* = ccw. . . . . 104
6-5 Illustration of the three ways in which Uso can fall short from the maximum value of 2. In each figure,
f17
andfj
are shown in blue and green, respectively. In (a), C1 and C2 are initially positioned on the "wrong" sides of 9, resulting in a shortfall from 2. Were the cows able to switch positions, the shortfall could be avoided. In (b), overlap between Su(ff) and Su(f2) creates unavoidable inefficiency. In (c),the shortfall results from the lack of convexity of
ff
andf2.
. . . . . 107 6-6 A socially optimal search strategy for the scenario considered inEx-ample 6.3. The socially optimal search strategy is illustrated by the purple line: C1 and C2 rendezvous at b, having travelled there in the cw and ccw directions, respectively, and proceed to explore [qi (0), q2(0)]c,,
in tandem. The segment R1, shown in red, is the portion of the ring that transitions from being explored by C2 in a cooperative search to being visited first by C1 in a competitive search. . . . . 111
7-1 A sample sequence of target capture times associated with the early stages of a DE-CPRG. In the instance shown, C1 captures targets 71, T2, and 74, while C2 captures targets 73 and 75. If the statistics shown are representative of steady-state behavior, then the aggregate utilities
of the cows would be U$'g(s) = 0.6 and U2(s) = 0.4, respectively. . . . 117
7-2 An isometric visualization of an instance of the DE-CPRG. The prior
fo
is shown in blue as a function of position along . Also shown are the origin and destination points associated with targets 7j, 'J+1, and 7i+2. At the instant shown, C1 and C2 are searching 9R for W,.According to
#y,
once 7j is discovered and transported from (9 to PDj, 75+j is popped from the queue of targets and appears on 9. . . . . . 1187-3 A snapshot of a DE-CPRG taken at the start of CPRGj. The origin-target density,
fo,
and destination-target density,fD,
are shown in (a) and (b), respectively. Targets are significantly more likely to (i) arrive in E1 rather than 'Z \E1 and (ii) seek transport to 0 2 rather than 'Z \8 2.1207-4 Illustration of two scenarios used in the proof of Proposition 7.1. In (a), C2 discovers a target at 0 , that requires transport to 9b, a distance
L
}
away. During transport, C1 has time to optimally preposition herself at Oc in preparation for the next stage. A finite time later, in (b), the roles reverse, 1, discovers a target at 0, that also requires transport to 6b, allowing C2 to optimally position herself at 0, for the next game. . 122
7-5 Visual breakdown of a typical interval spanning the time between suc-cessive target captures for Ci using si = s-. On average, it takes Ci time d to return to qV: after delivering 7j. From the perspective of Ci, in the worst-case, Ci finds a target at time td(Tij)+, which, on average, is delivered in time da. . . . . 132 7-6 Segments from possible sample runs, from the perspective of Ci, of a
List of Tables
3.1 Utility payoffs for the simple two-agent search game in Example 3.4. The possible actions of agent 1 are displayed in the leftmost column. The possible actions of agent 2 are displayed along the top row. Given each agent's search strategy, the first and second entry in each cell represent the utility of agent 1 and agent 2, respectively. For example, if agent 1 searches using si = a and agent 2 searches using s2 = b, then
the probability of agent 1 finding the target is 1 and the probability of agent 2 finding the target is . ... ... 48
4.1 Summary of general and CPRP-specific notation used in the thesis. 54
Chapter 1
Introduction
When eating an elephant, take one bite at a time.
Creighton Abrams
This thesis considers the decision-making process of mobile, self-interested search agents that compete, against one another, to find targets in a spatial environment. We are quick to point out that the adversarial scenarios of interest are fundamen-tally distinct from the cooperative formulations that dominate much of multi-agent search theory. By and large, these existing works study the exploits of a team of searchers that cooperate to efficiently locate a target. Unsurprisingly, the study of search scenarios that stress inter-agent competition among searchers calls for a new evaluative framework and a customized assortment of analytic methods. Providing
these elements and putting them to use is the central contribution of this thesis. The role of this preliminary chapter is to, at a high-level, introduce the types of problems that will be of interest. To this end, we recount a number of real-world examples in which the competitive search framework features prominently. The aim is to whet the reader's appetite and motivate why the problems considered are both intriguing and relevant. In particular, we will provide an example based on the operation of a taxi system that will be revisited and serve as a motivational aid
at various points throughout the thesis. A contributions section discusses how we see the work that comprises this document supplementing and extending the field of search theory. Finally, this chapter provides an overview of the thesis's organizational structure. This outline is useful as both a navigational aid and a preview of the story that follows.
1.1
Motivation
The problems considered in this thesis result from the fusion of two fundamental, yet previously disparate, ideas. The first key idea is that a mobile agent that wishes to locate a target, but does not know the target's exact location, is obligated to search for it. The second key idea is that competition naturally arises when multiple self-interested agents each vie to acquire a scarce resource. The first point is the premise of search theory. The second point, somewhat more subtly, touches on the competitive undertones of game theory. This work considers scenarios that incorporate both of these notions through the study of multi-agent systems in which the agents compete to capture targets given only limited knowledge of where the targets are located. To understand the void that the problems investigated in this thesis begin to fill, it is useful to, very briefly, highlight the types of search problems considered to date by those in the community. A more detailed account of the relevant literature will be provided in the next chapter.
In probabilistic search problems, one or more search agents attempt to (efficiently) capture a target that is indifferent to their actions. In many of these cases, search plans must be devised given only limited knowledge of a target's location. An example of a probabilistic search problem is the case of an explorer trying to find buried treasure given a raggedy and faded map of the area. When multiple agents are involved in the search, their plans are often formulated in a cooperative context in order to improve efficiency. For example, coordinated planning may increase the probability the target is found or reduce the expected time required to capture the
target. It also has the benefit of avoiding redundancies that could emerge if the agents planned independently.
In pursuit-evasion games, the target assumes a more animated role and actively chooses a fixed hiding location (immobile target) or trajectory (mobile target) to. evade capture by a team of searchers. Again, the searchers act cooperatively in order to capture the target efficiently, e.g., in minimum time or minimum expected time. In other words, competitive tension exists only between the target and, collectively, the team or search agents. The agents themselves have no preference for which agent, if any, ultimately finds the target. An example of a pursuit-evasion game is the case of an escaped convict who tries to evade capture by a team of police officers. Pursuit-evasion games naturally incorporate an element of game theory, as it is reasonable, and often necessary, for each party to factor in their adversary's actions when planning routes and making search-related decisions.
Probabilistic search problems and pursuit-evasion games address decision-making in a host of applications. However, they offer little guidance about how agents should search when the agents, themselves, compete against one another to capture targets. Pragmatically, it is fair to ask, why might one be interested in these scenarios? The answer, in the author's opinion, is that there are a number of relevant venues where the agent-versus-agent search dynamic features prominently. Before providing a collection of examples, it is useful to first give an informal description of the exact relationship that exists between agents and targets in the problems of interest. Naturally, a formal discussion of each of these components will follow later chapter of the thesis.
In the search games considered in this thesis, each agent is adversarially aligned with every other agent. Agents do not form teams, nor do they cooperate, unless doing so expressly benefits all parties. Agents are, unless otherwise stated, and aside from their initial conditions, homogeneous. Each agent has a prior on the location of targets, but the exact locations of the targets are unknown. Moreover, an agent can discover a target only when standing directly over it. Unlike pursuit-evasion games, the targets in the games we consider are artifacts of the environment, not strategic
decision-makers. The targets are purely immobile and the locations at which they appear in the environment are determined by a random process. Instead, the game, as it were, is played among the search agents, with each agent trying to capture as many targets as possible. To emphasize the stark differences that exist between this search framework and the cooperative formulations previously described, we refer to the problems considered in this thesis as competitive search games.
Returning to scenarios that emphasize the incentive for strategic decision-making in a competitive search setting, consider the role of yellow cabs in Manhattan [73].
These taxis operate in what is called a "hail market". By law, yellow cab drivers may only pick up passengers that have hailed them from the side of the street 169]. They cannot schedule jobs in advance, nor can they respond to call-in requests. (Jobs that originate under these circumstances are handled by a separate fleet of vehicles.) We argue that yellow cab operations constitute a competitive search game. Abstractly, the road network on which taxis drive may be viewed as a graph, whose edges and vertices represent roadways and intersections, respectively. The targets are the pas-sengers; they arrive dynamically according to an, albeit fairy complex socially-driven and time-variant, spatio-temporal process. The game is played among the taxi drivers, with each driver trying to maximize their individual revenue, which clearly requires getting passengers onboard. To operate effectively, drivers must plan their routes by accounting for the spatial demand pattern of passengers, as well as the location of nearby cabs. An interesting feature of this system is that targets must be transported from a pickup location to a dropoff location. That is, there is a service component associated with capturing a target. The logistics of taxi operations will be revisited at various points throughout this thesis to motivate specific problems of interest.
As a second example, consider the case of two rival shipwreck-recovery boats searching for the outskirts of a jagged coral reef for the remnants of a treasure ship lost at sea. Once more, we argue that this encounter has all the makings of a com-petitive search game. The environment is the subset of R2 that represents the waters surrounding the reef. The lone target is the sunken ship. The game is played between
the two recovery boats, with each boat trying to discover the wreck (and any trea-sure that may be onboard) first. Given a priori knowledge of where the ship sank, perhaps from crude sonar images, historical maps, word of mouth accounts of the sinking, etc., each boat must chart a course to search the coastal waters surrounding the reef. Once again, prudent search strategies must factor in not only probabilistic information about where the target is likely to reside, but also the presence of a rival salvage boat that harbors similar ambitions. A version of this scenario will motivate the work in Chapter 6.
The preceding scenarios differ markedly in terms of workspace geometry, the num-ber of agents involved, the processes by which targets arrive, and the time scales over which searching takes place. This suggests competitive search games encompass a broad class of search problems and there are potentially many other practical appli-cations that fit naturally within the framework. For example, the same ideas emerge in the prospecting and mining industries, where rival firms survey vast swaths of land for gold, minerals, or oil deposits. Given preliminary geographic information, how one of a handful of firms should prioritize testing potential mining sites in order to be the first to file claims on the most lucrative locations, fits well within the domain of competitive search games.
Along similar lines, imagine a military aircraft carrying sensitive information over hostile enemy territory were to crash-land in a desert. How should authorities search for the aircraft knowing other individuals, perhaps with unscrupulous intentions, are also looking for the plane. Once again, the competitive search game framework is a natural venue to pursue this question. Finally, competitive search games also have relevant connections to the foraging behavior of animals in the wild and the diffusion of bacterial colonies over a nutrient-laden agar plate. A sampling of these scenarios are illustrated in Figure 1-1. Given the apparent relevance of competitive search games, it is surprising, at least to the author, that few results, even for scenarios involving just two search agents, have been reported in the literature.
game framework captures the incentive for strategic decision-making in a host of meaningful search applications. However, as alluded to, the scenarios mentioned above differ markedly with respect to key features and environmental parameters, e.g., the number of search agents involved, the workspace geometries, the processes by which targets arrive, and the time scales over which searching takes place. Unsur-prisingly, it would be rather ambitious to expect a single formulation to capture the nuances and peculiarities of each scenario. In this thesis, we will consider a collection of idealized search games, with each encounter emphasizing one or more of the ele-ments that punctuate the aforementioned scenarios. In analyzing these encounters, this thesis provides the first rigorous analysis of competitive search games. A more detailed exposition of our research philosophy and the contributions of our work is discussed in the next section.
(a) (b) (c)
Figure 1-1: Depiction of real-world scenarios where agents compete, against one another, to capture targets given limited information on the location of targets. (a) Snapshot of taxi operations in Manhattan. In busy urban cities, the operation of taxi drivers trying to find passengers can be represented as a competitive search game. (b) A sunken treasure ship wrecked along a coral reef. The exploits that result from two rival recovery boats each trying to find the ship using a crude sonar map of the area constitutes a competitive search game. (c) A Kittyhawk P-40 that crash-landed in the Sahara desert during World War II. In the event rescue and enemy forces had some idea of the aircraft's location, e.g., from (intercepted) radio communications, and had each party launched a recovery operation, the resulting race to locate the plane would be a competitive search game.
1.2
Contributions
This section provides a high-level synopsis of the contributions of the thesis. A detailed account of specific advancements can be found in the next section, where the thesis is deconstructed on a chapter-by-chapter basis. Here, the focus is on conveying the spirit of the thesis, defining the scope of the work, and remarking on the value of the work going forward.
The major contribution of this thesis is a collection of algorithmic strategies that agents can use to search for targets in an environment. However, unlike existing constructs, which have no competitive tension or pit a cooperative team of pursuers against a target, the strategies presented herein are designed for situations in which search agents compete against one another to find targets. As mentioned, we believe this framework encapsulates the inter-agent search dynamics in many real-world sce-narios, yet acknowledge that, in their fullest form, these problems introduce a number of analytic and computational complexities.
To make headway, we will often restrict ourselves to encounters that involve two agents and that take place in topologically simple environments. For example, many of the problems considered involve two agents contesting targets on a ring. Despite these restrictions, the search scenarios nevertheless support an assortment of interesting and sometime surprising behaviors. Moreover, the modest furnishings of these problems allow us to conduct a formal analysis of the constituent decision-making, often in the form of quantifiable performance bounds, if not equilibrium strategies for the agents involved. This approach not only caters to the author's research style, but also serves to compile a set of initial competitive search game contributions. In this way, our efforts begin the process of populating a toolbox of competitive search game results that may prove useful in tackling more elaborate problems.
The next section outlines the content and contributions of the thesis on a chapter-by-chapter basis.
1.3
Organization
This thesis is organized in chapters. Chapter 2 begins our investigation by providing an overview of the relevant literature. By and large, this consists of contributions to the fields of probabilistic search, pursuit-evasion games, and persistent planning problems. Included here is an overview of the Cow-Path Problem. Many of the scenarios considered in this thesis are an adversarial twist on this well-known problem, so there is a vested interest in detailing its finer points. Throughout, we adopt the philosophy that by understanding the pillars currently in place, one can better define and appreciate the contributions of the work in this thesis. Still in a preparatory role, Chapter 3 provides a brief overview of some of the technical details used in subsequent chapters. Specifically, the game-theoretic terms discussed will be used to frame our discussion of algorithmic search strategies.
With the requisite background material in place, the thesis moves straight into novel material. The environment of interest in Chapter 4, as well as many of those that follow, is a ring. Rather than plunge headfirst into a treatment of competitive search games on a ring, we adopt a more tempered approach. As a prelude, we consider the problem of how a hungry cow should search the ring to find a patch of clover in the minimum expected time, given only a prior on the clover's location. This problem is thematically very similar to the Cow-Path Problem, and serves as a stepping stone to the adversarial encounters that follow. Iterative algorithms are provided for finding optimal search strategies and, for games with bounded target densities, a bound is given on the maximum number of times an intelligent cow would ever turn around. In this latter case, we show that an optimal search plan may be expressed as the end product of a nonlinear program followed by a trimming algorithm. This result is noteworthy as the Cow-Path problem has no known closed-form solutions for general target distributions.
Without further ado, Chapter 5 considers the canonical problem of this thesis: the Cow-Path Ring Game, a scenario in which two hungry cows compete, given a prior,
to find a patch of clover on a ring. Upon introducing the necessary notation and terminology, the problem is formally defined. Many of the games discussed in later chapters will be variations of this formulation. A concerted effort is made to explain why, for a number of reasons, including the realtime and feedback nature of the game, the Cow-Path Ring Game is a challenging problem. In response, a simplified version of the game is presented, one in which each cow may turn at most once. With this restriction in place, an iterative algorithm is developed that establishes the existence of an e-Nash equilibrium. Subsequently, a dynamic-programming-based approach is used to extend this result to games in which each cow may turn at most a finite number of times.
Moving on, Chapter 6 considers a potpourri of interesting scenarios that are suf-ficiently different from the Cow-Path Game to justify a chapter of their own. By im-posing a cost each time a cow turns, a bound is developed on the maximum number of times an intelligent cow would ever reverse directions. Continuing, we consider games in which each cow maintains a unique prior on the target's location. Carrying this momentum forward, we consider games where one cow is in the advantageous position of knowing where her rival suspects the target is located. This dichotomy requires specification of a behavioral model for both the more-informed and less-informed cow. Assuming the less-informed cow behaves conservatively, it is shown the game admits a Nash equilibrium. Moreover, for select distributions, the more-informed cow is able to increase her utility by leveraging her situational advantage. The asymmetric nature of these games invites the opportunity to study the social welfare of competitive search games. To this end, a cooperative search strategy is presented that is socially optimal for any set of target priors. This treatment transitions naturally into a discussion,
albeit a brief one, of the price of anarchy in competitive search games.
Chapter 7 considers competitive search games in which targets arrive dynamically on a ring. The persistent nature of these games places an emphasis on strategies that ensure targets are captured efficiently in the long-run. Among the dynamic games introduced are scenarios with transport requirements, in which targets, once
found, must be delivered to a destination point. A defining attribute of the search strategies in these games concerns how a cow should position herself while her rival is preoccupied delivering a target. As a first contribution, we show that in any equilibrium of a two-cow dynamic search game, each cow captures, in steady-state, half of all targets. With this benchmark established, it is shown that greedy search strategies can, for select target distributions, lead to arbitrarily poor capture rates. Because it is difficult to quantify the long-term effect of short-term actions in an equilibrium setting, we, instead, focus on defensive or conservative search strategies and lowerbound the expected fraction of targets captured using these methods. This bound is then compared with the theoretically optimum value, i.e., one half, for select target distributions.
Finally, Chapter 8 summarizes the prominent ideas of the thesis, reflects on the contributions made, and evaluates the resultant state of competitive search games. It also takes the time to outline an assortment of open research directions that have arisen during the development of this work, but that, on account of time constraints, or their tangential nature, or both, have received only modest deliberation.
Chapter 2
Background Material
This chapter provides an overview of related work. Recall that competitive search games stress the goal of finding targets in an agent-vs-agent setting. We view search theory as the natural domain of our work, and game theory as the appropriate frame-work to study the problems of interest. Consistent with this mindset, we will not attempt to summarize works from the field of game theory. Rather, a short com-pendium of the basic game-theoretic ideas, which constitute tools for our study, will be provided in Chapter 3. These ideas are well established and covered in any intro-ductory text on the subject. The major contribution of this thesis lies in using these ideas to understand search in a novel setting. To this end, this chapter surveys rele-vant contributions to the field of search theory. The intent is to provide an overview of the literature, both pre-existing and ongoing, that has relevant connections to competitive search games, be the association in terms of application, methodology, or both. This highly focused survey of select works in the fields of probabilistic search, pursuit-evasion games, and, what we will refer to as persistent planning problems, fosters an appreciation for the state-of-the-art and assists in defining the ultimate identity of the thesis. Unlike competitive search games, the vast majority of works covered in this chapter do not pit one search agent against another. Nevertheless, they share salient features with the problems we consider or serve to better position the thesis work within a larger search narrative.
2.1
Search Theory: An Introduction
Searching for a lost or hidden item is an age-old problem. People still misplace their keys, passport, phone, cash, etc., and, when they do, typically search to find them. Searching is also associated with larger-scale recovery operations, e.g., rescuing a camper lost in the wilderness. In this thesis, search theory is defined as the study of problems that take place in a spatial environment and involve n agents trying to find m targets. Note this definition is quite broad. For example, it says nothing about the interaction between agents, which could be of a cooperative or competitive nature, nor the manner in which targets are distributed and arrive. In many cases, the task of searching is constrained by the need to locate targets efficiently. For example, in some applications, there is the possibility a target goes undiscovered. Here, it makes sense to use a strategy that maximizes the probability of finding it. In other applications, it is known that a target resides somewhere in a bounded environment. Although a lawnmower-style sweep of the workspace is guaranteed to find the target, it is more appropriate to use a search strategy that minimizes the expected discovery time [31]. In short, interesting search problems combine the goal of finding targets with the need to provide some form of performance guarantee.
When people misplace basic everyday items, they typically launch small-scale, ad-hoc campaigns to relocate them. These undisciplined approaches generally suffice for finding low-value items in small spaces. However, as the value of the object increases, e.g., a human life, the size of the environment grows, e.g., a forest hundreds of square kilometers in size, or both, successfully searching demands a more structured treatment. The first rigorous approach to solve search problems was undertaken during World War II when the Anti-Submarine Warfare Operations Group was tasked with finding submarines in the Atlantic [58], [63]. The declassification of these efforts kicked off a mathematical investigation of search-related problems. Today, search theory is an established field within operations research. More recently, advances in autonomy have initiated efforts to revisit traditional search paradigms from a robotics
perspective. This movement has attracted interest from control theorists, roboticists, and computer scientists. These researchers have raised the profile of new and emerging applications within the search community, and advocated for more algorithmic and pragmatic approaches to solve many existing search problems [17],
[331.
Auspiciously, search theory researchers have surveyed their field with remarkable regularity, including the authors of [33], which recount many of the efforts detailed here. Owing to these efforts, search problems generally obey a well-defined taxonomy. Figure 2-1 provides a visualization of select disciplines within the hierarchy of search problems. Rather than reiterate existing surveys, the focus of this chapter is on con-veying advancements that help to frame the contributions of our work. Accordingly, we freely pick and choose to cover the topics we deem most relevant. In doing so, we often ignore or only briefly touch on contributions that while extremely significant, are of minimal importance for future discussion. For completeness, the interested reader can find detailed accounts of the classical period of search theory, spanning the first forty-or-so years of the field, which we touch on only briefly, in [17], [371,
[62], [92].
The last section of the chapter highlights problems that stress persistent planning for applications that feature indefinite horizons of operation and time-varying envi-ronments. Many of the results reported have emerged only recently, and, so far, have had only tenuous affiliations with searching. Nevertheless, their long-term approach to planning is pertinent for the work in Chapter 7, where we consider games with dynamically arriving targets. In briefly surveying these works, the intent is to convey how our efforts contribute to the state-of-the-art.
search theory
probabilistic search search games
imperfect sensor perfect sensor agent(s) vs target
static mobile cow-path statiC mobile
evader evader problems evader evader games
Figure 2-1: A partial taxonomy of select sub-disciplines within the field of search theory. It is worth reinforcing that the families of games represented are only a relevant sampling of select research areas in the field, and not an exhaustive listing. The box shaded in blue represents agent-vs-agent or competitive search games, the class of problems that will be the focus of this thesis. The location of CSGs in the tree indicates these problems share fundamental attributes with probabilistic search problems and pursuit-evasion search games. The image was inspired by similar figures reported in 1171, [331.
2.2
Probabilistic Search
In probabilistic search problems, a search agent, located in environment Q, attempts to capture a target, T, whose initial position and movement are independent of the agent's actions [33]. That is, T is impervious or indifferent to being captured. In many cases, the agent must devise a search plan given only a prior density,
fy
: Q -- R>o, on T's position. Initial efforts to place probabilistic search problems on a firm theoretical foundation were undertaken in [58], and later expanded upon in[59], [60]. Here, geometric arguments are used to characterize the sensor footprint
and detection efficiency of various sensor rigs, e.g., aerial surveillance with a human spotter. Included is a result linking random search to a detection probability function that is exponential in the time spent searching a bounded region. As Figure
2-1 indicates, probabilistic search problems are naturally categorized according to the
sensing capabilities of the agents involved. For most problems, the natural distinction is between sensors that are (i) imperfect, i.e., may generate false-negatives, and (ii) perfect, but have a finite sensing radius range.
2.2.1
Search with an imperfect sensor
When an agent's sensor is imperfect, it may fail to detect a target within its sensing zone. Accordingly, whether the target is found must be discussed in probabilistic terms. For the time being, assume the target is stationary. The detection function b : Q x R>O - [0, 1], assigns the probability b(q, z) to finding the target at point q E Q, given z amount of effort is spent searching q, and the target is in fact at q. Given fW, b, and a constraint budget C on the resources (e.g., time) that can be devoted to searching, the canonical imperfect-sensor search problem is to find z*(q) the optimal expenditure of search effort at each point q E Q that maximizes the probability of finding the target subject to all constraints, i.e.,
z* = argmax
J
f(q)b(q, z(q))dq (2.1)z:Q-+-Ryo I
s.t. Jz(q)dq ; C. (2.2)
qcEQ
In continuous environments, solutions to (2.1)-(2.2) typically employ Lagrange multiplier techniques [60], [92], [95]. Hypothesis testing [40], [741 and convex pro-gramming [28] methods have also been used. If an optimal search plan z*, with search budget T, has the property that for all t < T, z* restricted over [0, t] is opti-mal for search budget t, z* is said to be uniformly optiopti-mal - a desirable property. In [7], [61], it is shown that uniformly optimal search plans exist for a broad class of problems, provided b is a regular function, i.e., b(.) is increasing, but provides di-minishing returns in the argument, [33], [93]. Unfortunately, the search plans these methods generate are not always feasible, and may require the agents jump or teleport between points in order to realize them [10],
[35],
[76]. Even today, search plans often neglect this fundamental requirement, providing high-level search instructions, but little instruction as to how these may be transformed into drivable search routes, i.e., realizable paths [26], [66]. The search plans considered in this thesis all correspond to continuous, i.e., realizable, trajectories.From a search perspective, an environment Q is discrete if it may be partitioned
into regions, 1, ... , K such that b(k, z) is the probability of finding the target in
region k, given z amount of effort is* spent searching region k (as a whole) and the target is in fact in region k. Unfortunately, Lagrange methods do not extend directly to discrete Q. The necessary amendments are discussed in [50]. As an analog to uniform optimality, it was shown in [30] that optimal search plans in discrete Q are temporally greedy if at any point during search, the next cell to be further inspected is the one that maximizes the marginal gain in detection probability per marginal effort expended. Operating within discrete environments makes it easier to formulate and analyze variants on the basic problem structure. [17] and [33] provide an solid overview of these and other endevors. In this and the next paragraph, we reiterate a number of these efforts to provide a sense for the scope of problems that have been addressed. Returning to discretized search paradigms, partitioning the environment and the effort expended into discrete components is a much more natural framework to model, among other things, scenarios where a quantized level of effort must expended each time a region is searched and the rewards for capture are discounted in time or search effort. More discussion of these problems, often referred to as sequential
searching, can be found in [52], [68], [93],
194].
A recent trend in one-sided searching is to consider operations in physically-expansive environments. In these settings, streamlining the numerics is an impor-tant consideration to alleviate computational bottlenecks. Efforts in this vein are recounted in [82]. Other works have focused on search problems with false contacts [53], sensors that generate false positives [45] or, similarly, contain obstacles in the environment. In the optimal stopping problem, it is not known whether or not a target actually resides in the environment [51], [52]. Rather, after some amount of exploration, the agent must report (i) the target is not in Q, or (ii) the target is in Q
alongside its most likely location. Of course, the agent may reply incorrectly. These problems introduce a new class of performance metrics, e.g., the probability the agent makes a correct decision about target's inclusion in Q. Dynamic formulations of this problem use observations to update target belief functions within a Bayesian setting
[34]. This latter class of problems results in feedback search plans that use recorded observations to guide future decision-making. Motivated by an interest in develop-ing autonomous robotic search platforms, a number of recent efforts have considered cooperative, multi-agent formulations to solve variants of the probabilistic search problem. For example, [32] uses a Bayesian approach that allows a team of pursuers to quickly decide (though not necessarily correctly) whether or not a target is in the environment, and dynamic programming-based solutions to solve similar problems are discussed in [65]. However, as these methods often scale unfavorably with respect to key factors, e.g., the number of search agents or the workspace complexity, research efforts have also been directed at developing suboptimal algorithms with known, and acceptable, performance guarantees.
2.2.2
Search with a perfect sensor
A sensor is perfect if it never registers false negatives. Occasionally, it makes sense to rule out the possibility of false positives as well. It is important to remember that perfect sensors are still assumed to have a finite sensing radius. If all targets are stationary, then there is no need for an agent equipped with a perfect sensor to scan any point more than once for targets. For this reason, perfect-sensor problems focus not only on finding targets, but doing so in the minimum expected time. Of course, if targets arrive dynamically, it is likely necessary to revisit points throughout the workspace. This section considers a collection of perfect-sensor, probabilistic search problems for static environments.
The Cow-Path Problem, or simply CPP, was proposed, independently, by Beck [12] and Bellman [16] in the 1960s. As the reader may have surmised, the CPP has strong thematic connections with the encounters studied in this thesis. This is reflected, most notably, by the fact that the players or agents in our games are also cows. Since its inception, the CPP has become a canonical problem in the fields of probabilistic path-planning, robotics, and operations research. The exact statement of the CPP varies from field to field. For example, those in the online algorithms
community typically concentrate on a version that emphasizes search performance in the worst-case [351. In this thesis, however, we will be interested in the following stochastic version, which places a premium on performance in the average case.
Definition 2.1 (The Cow-Path Problem). A hungry cow is positioned at the origin of a fence represented by the real line R. The cow knows that a patch of clover resides somewhere along R, but has only a prior, fT : R -- R>o, on its location. The cow can move at unit speed and reverse direction instantaneously. On account of being severely nearsighted, the cow can locate the target only when she is standing directly over it. How should the cow search to find the clover in the minimum expected time?
fence
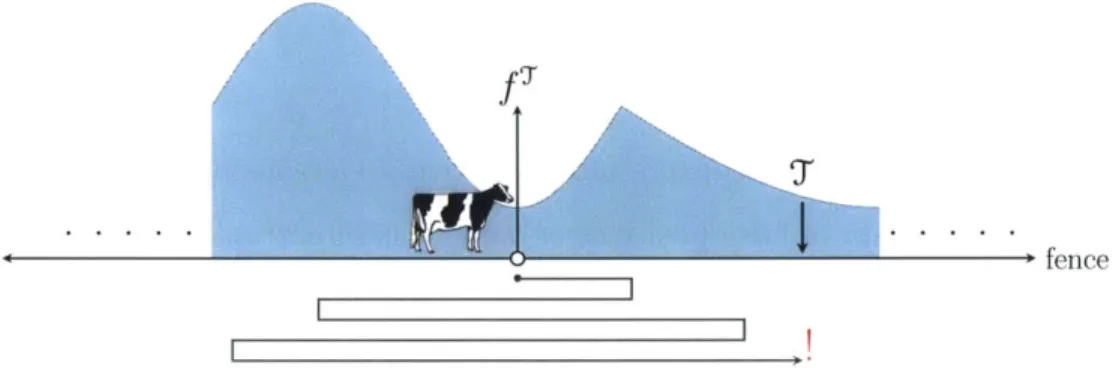
Figure 2-2: Illustration of the key features of the stochastic or average case Cow-Path Problem. Starting from the origin, the cow explores R in search of clover T. A hypothetical search plan is shown in gray. In the instance depicted, the cow makes four turns before finding the target at the point marked with a red exclamation mark.
In the CPP, the cow's sensory capabilities are represented by a sensor that has
zero sensing radius, but perfect accuracy. Figure 2-2 provides a visualization of the CPP. In the decades since the CPP's inception, various analytic conditions necessary
for search plan optimality have been reported, e.g., [9], [12], [13], [141, [15], [54]. Given
these contributions, it is perhaps surprising that exact (analytic) solutions are known for only a handful of target distributions; specifically, the rectangular, triangular, and normal density functions [42]. For general distributions, the common approach remains to discretize the workspace and rely on dynamic-programming techniques.
Recently, a variant of the CPP, in which costs are levied against the cow each time she turns, was investigated in [361.
2.3
Pursuit-evasion games
Pursuit-evasion games involve one or more pursuers trying to capture an evader. Typically, these games can be effectively classified according to which aspects of the pursuit receive the greatest emphasis, which, in turn, drive the mathematical tech-niques and solution methodologies employed. Unless otherwise stated, it is assumed throughout the section that both the pursuer and evader are mobile.
The Princess-and-Monster and Homicidal-Chauffeur games [11], involve one player attempting to capture a more agile adversary. In these and other games where it is critical to model player dynamics, e.g., a finite-turning radius, acceleration con-straints, etc., the interplay between pursuer and evader may be cast as a differential game. The player's objectives and dynamics are incorporated in the Hamilton-Jacobi-Isaacs equation, which, when solved, gives each player's equilibrium strategy in the form of a full-state, position, feedback control law. Unfortunately, as more pursuers are recruited for searching, or the workspace becomes more complex, e.g., obstacles or irregular perimeter boundaries are introduced, these methods quickly become in-tractable [33]. Differential games are sufficiently distinct from competitive search games that to avoid unnecessary digression, the interested reader is referred to [47], [48] for a detailed account of the subject.
Combinatoric search games strip away details of the problem deemed superfluous for the application at hand. Instead, player motion and workspace geometry are mod-eled using simplified dynamics and basic topological structures. These abstractions permit an insightful high-level study of pursuit-evasion scenarios that would not oth-erwise be possible. Within this class, ambush games stress the need for algorithms that ensure the evader is captured, even under conditions that are highly unfavorable or statistically rare. In the cops-and-robbers game, a robber (evader) and one or more
cops (pursuers) take turns moving between vertices of a graph [3], [75]. The cops win the game whenever a cop and the robber are collocated at a vertex. When capture can always be avoided, by judicious play on the part of the robber, the robber wins. The cop number of a game is the minimum number of cops needed to ensure capture for any initial conditions of the game. Generally speaking, the bulk of research in this area is aimed at characterizing winning conditions, the cop-number, and mono-tonicity, i.e., the property that the number of safe vertices decreases in the number of cop moves, in relation to graph topology. For example, a famous result is that every planar graph has a cop number of three or less. Extensions of these ideas to games played on hypergraphs are discussed in [43] for the marshalls-and-robbers game.
Parson's game considers the problem of clearing a building (a graph with nodes and edges representing rooms and hallways, respectively) that has been infiltrated by an infinitely fast and agile trespasser [78], [79]. The problem is similar to the art-gallery problem [76], except the super-human speed of the assailant requires rooms be swept in a manner that ensures previously cleared spaces are not recontaminated
[78]. This is achieved by placing guards at topologically-inspired locations to ensure the perpetrator is confined to an ever diminishing region of the workspace. Research efforts have focused almost exclusively on the search-number, i.e., the minimum num-ber of guards needed to locate the evader in the worst-case. Once again, much less effort has been devoted to developing search algorithms to carry out such a sweep, or to characterizing the time complexity of these schemes. The GRAPH-CLEAR problem is an extension of Parson's game in which multiple agents are, in general, required to guard doorways and sweep rooms [56]. Determining the minimum number of pursuers is known to be computationally challenging, but efficient algorithms have been reported for graphs possessing special structure, e.g., tree graphs [55], [57].
The lion-and-man game is thematically similar to cops-and-robbers, but unfolds in two-dimensions, typically a circle or a polygon. The hungry lion tries to eat the man, while, as one may have guessed, the man tries to escape. Conditions for the lion to capture the man are reported in [84] for a turn-based version of the game.
Extensions to higher-dimensions, most meaningfully R3, are reported in [4], [641. A robotics-inspired variant of the game, in which the pursuer has line-of-sight visibility, but cannot see through obstacles or boundaries is proposed in [44], [67]. Strategies for two lions to capture the man in any simple polygon and for three lions to capture a man in a two-dimensional polygon with obstacles are reported in [49] and [221, respectively. In many of these problems, randomized search schemes are employed to minimize the search number. Variations of the game involving finite sensing radii are reported in [4], [24]. The problem of coordinating multiple agents that each have a finite sensing radius remains an open problem [331, as does quantifying the time-complexity of possible capture schemes.
The essential elements of Parson's game are extended to hyper-graphs as in [43], where they refer to the encounter as a marshalls-and-robbers game. Here the graph-theoretic notion of tree width features prominently in analyzing the game. Estab-lishing connection to other notions of graph theory, various complexity measures for pursuit-evasion games are characterized in [25], [83]. A more complete survey of pursuit evasion in graphs can be found in [6], [391, and more recently in [33] which originally pointed the author to these works.
A second class of combinatoric search game concerns the exploits of a pursuer who tries to capture an evader in minimal time. The evader, not being one to go quietly, strives to delay capture for as long as possible [5], [42]. Owing to these competing objectives, optimal player strategies are best understood using the language and for-malism of game theory. Equilibrium strategies, which are typically highly dependent on workspace geometry, are reported in [5] for games taking place in an assortment of environments, including line segments, specialized graphs, and compact regions of R2. Once again, the use of mixed strategies is critical to describing equilibrium play. Also in [5], the authors consider team search games in which multiple pursuers scour the environment in an effort to locate the evader quickly. In this respect, the game is played between the team of pursuers and the lone evader; individual pursuers have no preference for which of them, if any, ultimately succeeds in capturing the evader.