HAL Id: hal-00297392
https://hal.archives-ouvertes.fr/hal-00297392
Submitted on 22 Jul 2005
HAL is a multi-disciplinary open access
archive for the deposit and dissemination of
sci-entific research documents, whether they are
pub-lished or not. The documents may come from
teaching and research institutions in France or
abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est
destinée au dépôt et à la diffusion de documents
scientifiques de niveau recherche, publiés ou non,
émanant des établissements d’enseignement et de
recherche français ou étrangers, des laboratoires
publics ou privés.
Satellite radiometric remote sensing of rainfall fields:
multi-sensor retrieval techniques at geostationary scale
F. S. Marzano, D. Cimini, E. Coppola, M. Verdecchia, V. Levizzani, F.
Tapiador, J. F. Turk
To cite this version:
F. S. Marzano, D. Cimini, E. Coppola, M. Verdecchia, V. Levizzani, et al.. Satellite radiometric
remote sensing of rainfall fields: multi-sensor retrieval techniques at geostationary scale. Advances in
Geosciences, European Geosciences Union, 2005, 2, pp.267-272. �hal-00297392�
Advances in Geosciences, 2, 267–272, 2005 SRef-ID: 1680-7359/adgeo/2005-2-267 European Geosciences Union
© 2005 Author(s). This work is licensed under a Creative Commons License.
Advances in
Geosciences
Satellite radiometric remote sensing of rainfall fields: multi-sensor
retrieval techniques at geostationary scale
F. S. Marzano1,2, D. Cimini1, E. Coppola1, M. Verdecchia1, V. Levizzani3, F. Tapiador4, and J. F. Turk5
1Centro di Eccellenza CETEMPS, Universit`a dell’Aquila, Via Vetoio – 67010, L’Aquila, Italy 2Dipartimento di Ingegneria Elettronica, Universit`a “La Sapienza” di Roma, Rome, Italy
3Istituo di Scienze dell’Atmosfera e Clima (ISAC), Consiglio Nazionale delle Ricerche, Bologna, Italy 4Instituto de Ciencias Ambientales, Universidad de Castilla-La Mancha (UCLM), Toledo, Spain 5Marine Meteorology Division, Naval Research Laboratory (NRL), Monterey, California, USA
Received: 11 November 2004 – Revised: 11 July 2005 – Accepted: 13 July 2005 – Published: 22 July 2005
Abstract. The Microwave Infrared Combined Rainfall Al-gorithm (MICRA) consists in a statistical integration method using the satellite microwave-based rain-rate estimates, as-sumed to be accurate enough, to calibrate spaceborne in-frared measurements on limited sub-regions and time win-dows. Rainfall retrieval is pursued at the space-time scale of typical geostationary observations, that is at a spatial resolu-tion of few kilometers and a repetiresolu-tion period of few tens of minutes. The actual implementation is explained, al-though the basic concepts of MICRA are very general and the method is easy to be extended for considering innova-tive statistical techniques or measurements from additional space-borne platforms. In order to demonstrate the poten-tiality of MICRA, case studies over central Italy are also dis-cussed. Finally, preliminary results of MICRA validation by ground based remote and in situ measurements are shown and a comparison with a Neural Network (NN) based tech-nique is briefly illustrated.
1 Introduction
The problem of using satellite remote sensing data to retrieve rainfall is fairly complicated since presently there is not a single spaceborne platforms which can carry all the suitable instruments to ensure all the properties to the rainfall prod-uct (Levizzani et al., 1995; Vicente et al., 1998; Turk et al., 1999). From a meteorological point of view, visible (VIS) and infrared (IR) radiometers can give information on cloud top layers. On the other hand, microwave (MW) radiometers can detect cloud structure and rainrate since MW brightness temperatures (TB’s) are fairly sensitive to liquid and ice hy-drometeors (Ferraro, 1997). Regarding platforms, Geosyn-chronous Earth Orbit (GEO) satellites can ensure a
cover-Correspondence to: F. S. Marzano
age with a high temporal sampling, while Low Earth Orbit (LEO) satellites have the advantage to enable the use of mi-crowave sensors, but with a major drawback of low tempo-ral sampling. Therefore, LEO-MW and GEO-IR radiometry are clearly complementary for monitoring the Earth’s atmo-sphere and a highly variable phenomenon such as precipita-tion.
Statistical integration of satellite infrared and microwave data can be accomplished in several ways (Kummerow and Giglio, 1995; Bellerby et al., 2000; Miller et al., 2001; Marzano et al., 2001). On one hand, there is a choice of what variables (i.e., predictors) to match in order to provide the final product. A possibility is represented by the direct combination of MW TB’s and thermal IR (TIR) radiances, having the advantage to exploit the observable information without any post-processing and the disadvantage to request IR and MW measurements matched in space and time. The latter condition is only satisfied a limited number of times in a given area if few LEO platforms are considered thus flar-ing the statistical significance of any empirically-trained re-trieval algorithm. The feasible approach would be that based on physically-based retrieval algorithms which, on the other hand, would need a climatological and microphysical tuning. In order to avoid these difficulties, one can resort to ap-proaches whose aim is to combine IR measurements and MW-based estimates on a cumulative statistical distribu-tion basis. Indeed, artificial neural network (NN) can be conveniently applied to the same problem dealing with empirically-trained algorithms showing comparable perfor-mances (Hsu et al., 1997; Grimes et al., 2003; Tapiador et al., 2004a, 2004b).
In this work, the Microwave Infrared Combined Rainfall Algorithm (MICRA) is presented, based on the statistical in-tegration of collocated GEO-IR and LEO-MW data accom-plished on a local scale (Marzano et al., 2003, 2004) and it is compared with a NN-based algorithm: NEREMIS (NEural Rainfall Estimation algorithm using Microwave and Infrared
268 F. S. Marzano et al.: Satellite radiometric remote sensing of rainfall fields
Marzano, Cimini, Coppola, Verdecchia, Levizzani, Tapiador and Turk, “Satellite radiometric remote sensing ….”
July 11, 2005
2
2. Microwave infrared combined rainfall algorithm
The general idea behind the considered integration
techniques is to combine the appealing spatial and temporal
sampling of IR sensors, mounted on geo-stationary
platforms (GEO-IR), with the higher accuracy of passive
Low-Earth-Orbit Microwave (LEO-MW) methods for
rain-rate retrieval. The statistical integration techniques are
applied within a procedure which is supposed to run
continuously.
This procedure is based on a background process and a
foreground process. A schematic sketch of the block
diagram and the temporal flow chart of MICRA is shown in
Figure 1, while detailed equations are described in
(Marzano et al., 2003; Marzano et al., 2004).
MW
MW Inversion Inversion of of Rain Rain (INV)(INV)
Space
Space--Time Time Collocation Collocation (COL)(COL)
R R Background process (BP) T TBB T TIRIR Pre
Pre--processing (PRE)processing (PRE)
-Classification -Temporal memory -Thresholding
IR
IR--R R Statistical Integration Statistical Integration (INT)(INT)
IR
IR RetrievalRetrievalof of Rain Rain (RET)(RET)
Foreground process (FP)
T
TIR IR
MW
MW Inversion Inversion of of Rain Rain (INV)(INV)
Space
Space--Time Time Collocation Collocation (COL)(COL)
R R Background process (BP) T TBB T TIRIR MW
MW Inversion Inversion of of Rain Rain (INV)(INV)
Space
Space--Time Time Collocation Collocation (COL)(COL)
R R Background process (BP) T TBB T TIRIR Pre
Pre--processing (PRE)processing (PRE)
-Classification -Temporal memory -Thresholding
Pre
Pre--processing (PRE)processing (PRE)
-Classification -Temporal memory -Thresholding
Pre
Pre--processing (PRE)processing (PRE)
-Classification -Temporal memory -Thresholding
IR
IR--R R Statistical Integration Statistical Integration (INT)(INT)
IR
IR RetrievalRetrievalof of Rain Rain (RET)(RET)
Foreground process (FP)
T
TIR IR
IR
IR--R R Statistical Integration Statistical Integration (INT)(INT)
IR
IR RetrievalRetrievalof of Rain Rain (RET)(RET)
Foreground process (FP)
Rˆ
T
TIR IR
Fig. 1. Schematic sketch of the MICRA block diagram and flow chart
.
i) The first step of the background process consists: in
estimating the surface rain-rate from available LEO-MW
measurements by means of either empirical retrieval
algorithms or inversion schemes based on parametric cloud
radiative models (inversion step). This enables the
inversion of a set of brightness temperatures (TB) at
different frequency and polarization to provide a rain-rate
product spatially integrated within the nominal area A.
ii) The second step of the background process pursues the
combination of LEO-MW sensor data with data coming
from GEO-IR sensor in space and time on a global scale
(collocation step). This step consists in temporally locating
the GEO-IR data within the past few tens of minutes of the
LEO-MW data time and to re-map into the geographic
coordinates both GEO-IR and LEO-MW measurements
available observations. Note that, since spatial resolution of
MW data is generally worse than IR ones, a MW
field-of-view of nominal area A generally includes more than one
IR pixel. As a result of the background process, a data set is
generated, containing the per-pixel rain-rate retrieved from
LEO-MW data, the co-located GEO-IR brightness
temperature and the pixel geo-location. This process is
continuously ongoing, since new LEO-MW and GEO-IR
data are continuously ingested depending on available
satellite platforms.
iii) The third step is a foreground process, started to
derive the R-TIR inverse relationship once the data set has
been updated. A pre-processing stage is accomplished after
each background process. The IR retrieval relationships are
updated every time a new set of combined data have been
added to the data set relative to that sub-region, and are
derived using data archived in a time window of several
hours (integration step). To assure that only the most recent
rain history is captured and to guarantee a statistical
significance of the training set, the R-TIR inverse
relationship for a given sub-region is derived using only the
most recent combined data.
iv) The last step is represented by the prediction of the
surface rain-rate from IR measurements in a given
sub-region by applying the derived R-TIR algorithm (retrieval
step). Many attempts have been carried out so far to derive
this R-TIR relationship, using different techniques such as
probability matching formulations, regression methods and
artificial neural networks. Details on the background and
foreground processes are given section 4.
3. Neural rainfall estimation algorithm using
microwave and infrared sensors
The NEREMIS techniques shares the same methodology of
MICRA, but uses a Multiply Layer Feed Forward NN
architecture as shown in Fig. 2 (Grimes et al., 2003;
Tapiador et al., 2004b). It is a four layers network using as
input the IR TB from GEO-IR sensor and latitude and
longitude information.
Fig 2
Neural Network architecture for rainfall estimation
The NN is calibrated using input data derived from the
GEO-IR sensor and output rain-rate retrieved from
available LEO-MW measurements. This requires, as for
MICRA, measurements from both IR and microwave
sensors collocated in space and in time. The calibration
period has been fixed for this study to 24 hours and the
validation has been carried on for the following day. In
particular, the calibration periods are the 24 hours of the
Jan. 23, 2003, while Jan. 24, 2003 has been retained for the
validation.
There is not any constraint in choosing a calibration
period. The one day time step has been selected due to the
length of the precipitation event that has been observed for
at least tree days. In case of a short rain event the time step
could be reduced to few hours.
Fig. 1. Schematic sketch of the MICRA block diagram and flow chart.
Sensors). As an application, some case studies on the area of central Italy are discussed, comparing satellite based es-timates with ground-based remote (radar) and in situ (rain gauges) observations, in order to demonstrate the potentiality of monitoring precipitation using the proposed techniques.
2 Microwave infrared combined rainfall algorithm The general idea behind the considered integration tech-niques is to combine the appealing spatial and temporal sam-pling of IR sensors, mounted on geo-stationary platforms (GEO-IR), with the higher accuracy of passive Low-Earth-Orbit Microwave (LEO-MW) methods for rain-rate retrieval. The statistical integration techniques are applied within a procedure which is supposed to run continuously.
This procedure is based on a background process and a foreground process. A schematic sketch of the block dia-gram and the temporal flow chart of MICRA is shown in Fig. 1, while detailed equations are described in (Marzano et al., 2003; Marzano et al., 2004).
i) The first step of the background process consists in esti-mating the surface rain-rate from available LEO-MW measurements by means of either empirical retrieval algorithms or inversion schemes based on parametric cloud radiative models (inversion step). This enables the inversion of a set of brightness temperatures (TB) at different frequency and polarization to provide a rain-rate product spatially integrain-rated within the nominal area A.
ii) The second step of the background process pursues the combination of LEO-MW sensor data with data com-ing from GEO-IR sensor in space and time on a global
scale (collocation step). This step consists in tempo-rally locating the GEO-IR data within the past few tens of minutes of the LEO-MW data time and to re-map into the geographic coordinates both GEO-IR and LEO-MW measurements available observations. Note that, since spatial resolution of MW data is generally worse than IR ones, a MW field-of-view of nominal area A gen-erally includes more than one IR pixel. As a result of the background process, a data set is generated, con-taining the per-pixel rain-rate retrieved from LEO-MW data, the co-located GEO-IR brightness temperature and the pixel geo-location. This process is continuously on-going, since new LEO-MW and GEO-IR data are con-tinuously ingested depending on available satellite plat-forms.
iii) The third step is a foreground process, started to de-rive the R-TIR inverse relationship once the data set has been updated. A pre-processing stage is accomplished after each background process. The IR retrieval rela-tionships are updated every time a new set of combined data have been added to the data set relative to that sub-region, and are derived using data archived in a time window of several hours (integration step). To assure that only the most recent rain history is captured and to guarantee a statistical significance of the training set, the R-TIR inverse relationship for a given sub-region is derived using only the most recent combined data. iv) The last step is represented by the prediction of the
sur-face rain-rate from IR measurements in a given sub-region by applying the derived R-TIR algorithm (re-trieval step). Many attempts have been carried out so far to derive this R-TIR relationship, using different techniques such as probability matching formulations,
F. S. Marzano et al.: Satellite radiometric remote sensing of rainfall fields 269
Marzano, Cimini, Coppola, Verdecchia, Levizzani, Tapiador and Turk, “Satellite radiometric remote sensing ….”
July 11, 2005
2
2. Microwave infrared combined rainfall algorithm
The general idea behind the considered integration
techniques is to combine the appealing spatial and temporal
sampling of IR sensors, mounted on geo-stationary
platforms (GEO-IR), with the higher accuracy of passive
Low-Earth-Orbit Microwave (LEO-MW) methods for
rain-rate retrieval. The statistical integration techniques are
applied within a procedure which is supposed to run
continuously.
This procedure is based on a background process and a
foreground process. A schematic sketch of the block
diagram and the temporal flow chart of MICRA is shown in
Figure 1, while detailed equations are described in
(Marzano et al., 2003; Marzano et al., 2004).
MW
MW Inversion Inversion of of Rain Rain (INV)(INV)
Space
Space--Time Time Collocation Collocation (COL)(COL)
R R Background process (BP) T TBB T TIRIR Pre
Pre--processing (PRE)processing (PRE)
-Classification -Temporal memory -Thresholding
IR
IR--R R Statistical Integration Statistical Integration (INT)(INT)
IR
IR RetrievalRetrievalof of Rain Rain (RET)(RET)
Foreground process (FP)
T
TIRIR
MW
MW Inversion Inversion of of Rain Rain (INV)(INV)
Space
Space--Time Time Collocation Collocation (COL)(COL)
R R Background process (BP) T TBB T TIRIR MW
MW Inversion Inversion of of Rain Rain (INV)(INV)
Space
Space--Time Time Collocation Collocation (COL)(COL)
R R Background process (BP) T TBB T TIRIR Pre
Pre--processing (PRE)processing (PRE)
-Classification -Temporal memory -Thresholding
Pre
Pre--processing (PRE)processing (PRE)
-Classification -Temporal memory -Thresholding
Pre
Pre--processing (PRE)processing (PRE)
-Classification -Temporal memory -Thresholding
IR
IR--R R Statistical Integration Statistical Integration (INT)(INT)
IR
IR RetrievalRetrievalof of Rain Rain (RET)(RET)
Foreground process (FP)
T
TIRIR
IR
IR--R R Statistical Integration Statistical Integration (INT)(INT)
IR
IR RetrievalRetrievalof of Rain Rain (RET)(RET)
Foreground process (FP)
Rˆ
T
TIRIR
Fig. 1. Schematic sketch of the MICRA block diagram and flow chart
.
i) The first step of the background process consists: in
estimating the surface rain-rate from available LEO-MW
measurements by means of either empirical retrieval
algorithms or inversion schemes based on parametric cloud
radiative models (inversion step). This enables the
inversion of a set of brightness temperatures (TB) at
different frequency and polarization to provide a rain-rate
product spatially integrated within the nominal area A.
ii) The second step of the background process pursues the
combination of LEO-MW sensor data with data coming
from GEO-IR sensor in space and time on a global scale
(collocation step). This step consists in temporally locating
the GEO-IR data within the past few tens of minutes of the
LEO-MW data time and to re-map into the geographic
coordinates both GEO-IR and LEO-MW measurements
available observations. Note that, since spatial resolution of
MW data is generally worse than IR ones, a MW
field-of-view of nominal area A generally includes more than one
IR pixel. As a result of the background process, a data set is
generated, containing the per-pixel rain-rate retrieved from
LEO-MW data, the co-located GEO-IR brightness
temperature and the pixel geo-location. This process is
continuously ongoing, since new LEO-MW and GEO-IR
data are continuously ingested depending on available
satellite platforms.
iii) The third step is a foreground process, started to
derive the R-TIR inverse relationship once the data set has
been updated. A pre-processing stage is accomplished after
each background process. The IR retrieval relationships are
updated every time a new set of combined data have been
added to the data set relative to that sub-region, and are
derived using data archived in a time window of several
hours (integration step). To assure that only the most recent
rain history is captured and to guarantee a statistical
significance of the training set, the R-TIR inverse
relationship for a given sub-region is derived using only the
most recent combined data.
iv) The last step is represented by the prediction of the
surface rain-rate from IR measurements in a given
sub-region by applying the derived R-TIR algorithm (retrieval
step). Many attempts have been carried out so far to derive
this R-TIR relationship, using different techniques such as
probability matching formulations, regression methods and
artificial neural networks. Details on the background and
foreground processes are given section 4.
3. Neural rainfall estimation algorithm using
microwave and infrared sensors
The NEREMIS techniques shares the same methodology of
MICRA, but uses a Multiply Layer Feed Forward NN
architecture as shown in Fig. 2 (Grimes et al., 2003;
Tapiador et al., 2004b). It is a four layers network using as
input the IR TB from GEO-IR sensor and latitude and
longitude information.
Fig 2Neural Network architecture for rainfall estimation
The NN is calibrated using input data derived from the
GEO-IR sensor and output rain-rate retrieved from
available LEO-MW measurements. This requires, as for
MICRA, measurements from both IR and microwave
sensors collocated in space and in time. The calibration
period has been fixed for this study to 24 hours and the
validation has been carried on for the following day. In
particular, the calibration periods are the 24 hours of the
Jan. 23, 2003, while Jan. 24, 2003 has been retained for the
validation.
There is not any constraint in choosing a calibration
period. The one day time step has been selected due to the
length of the precipitation event that has been observed for
at least tree days. In case of a short rain event the time step
could be reduced to few hours.
Fig. 2. Neural Network architecture for rainfall estimation.
regression methods and artificial neural networks. De-tails on the background and foreground processes are given Sect. 4.
3 Neural rainfall estimation algorithm using microwave and infrared sensors
The NEREMIS techniques shares the same methodology of MICRA, but uses a Multiply Layer Feed Forward NN archi-tecture as shown in Fig. 2 (Grimes et al., 2003; Tapiador et al., 2004b). It is a four layers network using as input the IR TB from GEO-IR sensor and latitude and longitude informa-tion.
The NN is calibrated using input data derived from the GEO-IR sensor and output rain-rate retrieved from avail-able LEO-MW measurements. This requires, as for MICRA, measurements from both IR and microwave sensors collo-cated in space and in time. The calibration period has been fixed for this study to 24 h and the validation has been carried on for the following day. In particular, the calibration periods are the 24 h of the 23 January 2003, while 24 January 2003 has been retained for the validation.
There is not any constraint in choosing a calibration pe-riod. The one day time step has been selected due to the length of the precipitation event that has been observed for at least tree days. In case of a short rain event the time step could be reduced to few hours.
The validation of NEREMIS has been carried on in the smaller area of central Italy due to data availability prob-lem. The performances of the trained neural network will be shown in Sect. 4.
4 Case studies and preliminary validation
The MICRA technique has been tested on a few case stud-ies characterized by intense and persistent rainfall over the Mediterranean basin. The LEO-MW data are provided by Special Sensor Microwave Imager (SSM/I) on board of the three Defense Meteorological Satellite Program (DMSP) platforms. LEO-IR data are provided by the Visible Infrared Spinning Scan Radiometer (VISSR) on board of the opera-tional European geostationary satellite METEOSAT.
Marzano, Cimini, Coppola, Verdecchia, Levizzani, Tapiador and Turk, “Satellite radiometric remote sensing ….”
July 11, 2005
3
The validation of NEREMIS has been carried on in the
smaller area of central Italy due to data availability
problem. The performances of the trained neural network
will be shown in section 4.
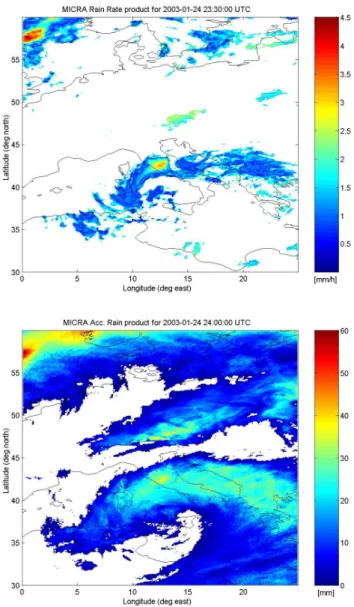
Fig. 3. Top: Rain rate estimated by MICRA for 24 January 2003, 23:30
UTC. Bottom: 24-hour accumulated rain as computed from 1-day time series of MICRA rain rate estimates for 24 January 2003.
4. Case studies and preliminary validation
The MICRA technique has been tested on a few case
studies characterized by intense and persistent rainfall over
the Mediterranean basin. The LEO-MW data are provided
by Special Sensor Microwave Imager (SSM/I) on board of
the three Defense Meteorological Satellite Program
(DMSP) platforms. LEO-IR data are provided by the
Visible Infrared Spinning Scan Radiometer (VISSR) on
board of the operational European geostationary satellite
METEOSAT.
The first case study we have analyzed occurred at the
end of January 2003. In the left half of Fig. 3 (left) is shown
rain rate over the Mediterranean basin as estimated by the
current implementation of MICRA at 23:30 UTC of Jan 24,
2003. It is evident a large convective cell developing over
Tuscany. Such a product is available every time a
METEOSAT-VISSR image is released. By simply
integrating a day-long time series of these estimated rain
rates, we are able to provide 24-hour accumulated rain over
the same area, as illustrated in the right half of Figure 3. In
Fig. 4. Top: Rain rate estimated by NEREMIS for 24 January 2003, 23:30
UTC. Bottom: 24-hour accumulated rain as computed from 1-day time series of NEREMIS rain rate estimates for 24 January 2003.
the 24 hours of Jan. 24, 2003, a large amount of rain has
fallen near the costs of UK. The effects of the just
mentioned convective activity over Tuscany are still
visible.
For the same case study the NEREMIS estimates are
shown. In Fig. 4 the instantaneous rain rate for 23:00 UTC
and the 24 hours accumulated rain are show for central
Italy. Comparing Figure 2 and Figure 3 for the 24 hours
accumulated rain the shape and the intensity of the rain
fields are in fairly good agreement, although the spatial
domain is limited. The instantaneous rain rate field
estimated for the 23:30 UTC by MICRA and NEREMIS
show a similar shape, but the intensity is slightly different.
In the top panel of Fig. 5 is presented the 02:00 UTC
product for the case study of May 20, 2003. Two areas with
intense precipitation are distinguishable, the larger over
Poland, while the other over Germany. A map of 24-hour
accumulated rain for this case study is illustrated in the
bottom of Figure 5. As the meteorological situation has
developed south-eastward, the largest amount of
accumulated rain was found in Northern Italy. Indeed, flash
floods were reported near the cost of North-eastern Italy
Fig. 3. Top: Rain rate estimated by MICRA for 24 January 2003,23:30 UTC. Bottom: 24-hour accumulated rain as computed from 1-day time series of MICRA rain rate estimates for 24 January 2003.
The first case study we have analyzed occurred at the end of January 2003. In the top of Fig. 3 is shown rain rate over the Mediterranean basin as estimated by the current imple-mentation of MICRA at 23:30 UTC of 24 January 2003. It is evident a large convective cell developing over Tuscany. Such a product is available every time a METEOSAT-VISSR image is released. By simply integrating a day-long time se-ries of these estimated rain rates, we are able to provide 24-hour accumulated rain over the same area, as illustrated in the bottom of Fig. 3. In the 24 h of 24 January 2003, a large amount of rain has fallen near the costs of UK. The effects of the just mentioned convective activity over Tuscany are still visible.
For the same case study the NEREMIS estimates are shown. In Fig. 4 the instantaneous rain rate for 23:30 UTC and the 24 h accumulated rain are show for central Italy. Comparing Figs. 2 and 3 for the 24 h accumulated rain the
270 F. S. Marzano et al.: Satellite radiometric remote sensing of rainfall fields
Marzano, Cimini, Coppola, Verdecchia, Levizzani, Tapiador and Turk, “Satellite radiometric remote sensing ….”
July 11, 2005
3
The validation of NEREMIS has been carried on in the
smaller area of central Italy due to data availability
problem. The performances of the trained neural network
will be shown in section 4.
Fig. 3. Top: Rain rate estimated by MICRA for 24 January 2003, 23:30
UTC. Bottom: 24-hour accumulated rain as computed from 1-day time series of MICRA rain rate estimates for 24 January 2003.
4. Case studies and preliminary validation
The MICRA technique has been tested on a few case
studies characterized by intense and persistent rainfall over
the Mediterranean basin. The LEO-MW data are provided
by Special Sensor Microwave Imager (SSM/I) on board of
the three Defense Meteorological Satellite Program
(DMSP) platforms. LEO-IR data are provided by the
Visible Infrared Spinning Scan Radiometer (VISSR) on
board of the operational European geostationary satellite
METEOSAT.
The first case study we have analyzed occurred at the
end of January 2003. In the left half of Fig. 3 (left) is shown
rain rate over the Mediterranean basin as estimated by the
current implementation of MICRA at 23:30 UTC of Jan 24,
2003. It is evident a large convective cell developing over
Tuscany. Such a product is available every time a
METEOSAT-VISSR image is released. By simply
integrating a day-long time series of these estimated rain
rates, we are able to provide 24-hour accumulated rain over
the same area, as illustrated in the right half of Figure 3. In
Fig. 4. Top: Rain rate estimated by NEREMIS for 24 January 2003, 23:30
UTC. Bottom: 24-hour accumulated rain as computed from 1-day time series of NEREMIS rain rate estimates for 24 January 2003.
the 24 hours of Jan. 24, 2003, a large amount of rain has
fallen near the costs of UK. The effects of the just
mentioned convective activity over Tuscany are still
visible.
For the same case study the NEREMIS estimates are
shown. In Fig. 4 the instantaneous rain rate for 23:00 UTC
and the 24 hours accumulated rain are show for central
Italy. Comparing Figure 2 and Figure 3 for the 24 hours
accumulated rain the shape and the intensity of the rain
fields are in fairly good agreement, although the spatial
domain is limited. The instantaneous rain rate field
estimated for the 23:30 UTC by MICRA and NEREMIS
show a similar shape, but the intensity is slightly different.
In the top panel of Fig. 5 is presented the 02:00 UTC
product for the case study of May 20, 2003. Two areas with
intense precipitation are distinguishable, the larger over
Poland, while the other over Germany. A map of 24-hour
accumulated rain for this case study is illustrated in the
bottom of Figure 5. As the meteorological situation has
developed south-eastward, the largest amount of
accumulated rain was found in Northern Italy. Indeed, flash
floods were reported near the cost of North-eastern Italy
Fig. 4. Top: Rain rate estimated by NEREMIS for 24 January 2003,
23:30 UTC. Bottom: 24-hour accumulated rain as computed from 1-day time series of NEREMIS rain rate estimates for 24 January 2003.
shape and the intensity of the rain fields are in fairly good agreement, although the spatial domain is limited. The in-stantaneous rain rate field estimated for the 23:30 UTC by MICRA and NEREMIS show a similar shape, but the inten-sity is slightly different.
In the top panel of Fig. 5 is presented the 02:00 UTC product for the case study of 20 May 2003. Two areas with intense precipitation are distinguishable, the larger over Poland, while the other over Germany. A map of 24-hour accumulated rain for this case study is illustrated in the bot-tom of Fig. 5. As the meteorological situation has developed south-eastward, the largest amount of accumulated rain was found in Northern Italy. Indeed, flash floods were reported
Marzano, Cimini, Coppola, Verdecchia, Levizzani, Tapiador and Turk, “Satellite radiometric remote sensing ….”
July 11, 2005
4
Fig. 5. Top: Rain rate estimated by MICRA for 20 May 2003, 02:00 UTC.
Bottom: 24-hour accumulated rain as computed from 1-day time series of MICRA rain rate estimates for 20 May 2003.
during 20-21 May 2003. Although qualitative results are
encouraging, a systematic validation would be needed. A
way to pursue this goal is by comparison with ground based
remote (radar) and in situ (raingauge networks)
measurements available for the areas under investigation, as
illustrated in Fig. 6. Unfortunately, both data sets were not
available during the presented case study.
A preliminary example of ground validation with radar
measurements is presented in Fig. 7. Radar data (top) were
collected by the S. Pietro Capofiume unit, owned by the
Regional Environmental Agency of Emilia Romagna
(ARPA-SIM), and processed by the Regional Meteo-hydro
Service (SIM). At radar original resolution (order of 1 km),
differences in rate rates of one order of magnitude are
found with respect to MICRA estimates (bottom).
However, a meaningful comparison has to take into
account the fact that rain rate estimates by MICRA are
limited by the relatively poor spatial resolution of both
GEO-IR and LEO-MW measurements. Thus, radar spatial
resolution needs to be degraded to the resolution achievable
by satellite (order of 10 km).
If we average radar measurements in Figure 7 to match
the satellite pixel resolution, and we consider only the area
covered by the radar beam, we obtain what shown in Fig. 8.
Now the qualitative comparison looks much better: areas of
intense rain are fairly well detected and the difference of
rain rate values is significantly reduced. Average errors are
of the order of 30% with an overall trend to underestimate
the radar estimates.
Fig. 6. Available measurements from ground-based radar and raingauge
networks are used in the validation of MICRA.
Fig. 7. A comparison between rain rates as measured by ground-based
radar (top) and satellite-based MICRA technique (bottom). Original radar resolution, about 1 km, is shown.
From these first results it seems that the present
implementation of MICRA tends to underestimate rain rates
values. Further analysis is needed in order to optimize the
algorithm parameterization, such as choices of sub-region
size, spacing and look-back time lag. Results for NEREMIS
show a similar behavior.
Fig. 5. Top: Rain rate estimated by MICRA for 20 May 2003,
02:00 UTC. Bottom: 24-hour accumulated rain as computed from 1-day time series of MICRA rain rate estimates for 20 May 2003.
near the cost of North-eastern Italy during 20–21 May 2003. Although qualitative results are encouraging, a systematic validation would be needed. A way to pursue this goal is by comparison with ground based remote (radar) and in situ (raingauge networks) measurements available for the areas under investigation, as illustrated in Fig. 6. Unfortunately, both data sets were not available during the presented case study.
A preliminary example of ground validation with radar measurements is presented in Fig. 7. Radar data (top) were collected by the S. Pietro Capofiume unit, owned by the Re-gional Environmental Agency of Emilia Romagna (ARPA-SMR), and processed by the Regional Meteo-hydro Service (SIM). At radar original resolution (order of 1 km), differ-ences in rate rates of one order of magnitude are found with respect to MICRA estimates (bottom).
F. S. Marzano et al.: Satellite radiometric remote sensing of rainfall fields 271
Marzano, Cimini, Coppola, Verdecchia, Levizzani, Tapiador and Turk, “Satellite radiometric remote sensing ….”
July 11, 2005 4
Fig. 5. Top: Rain rate estimated by MICRA for 20 May 2003, 02:00 UTC.
Bottom: 24-hour accumulated rain as computed from 1-day time series of MICRA rain rate estimates for 20 May 2003.
during 20-21 May 2003. Although qualitative results are encouraging, a systematic validation would be needed. A way to pursue this goal is by comparison with ground based remote (radar) and in situ (raingauge networks) measurements available for the areas under investigation, as illustrated in Fig. 6. Unfortunately, both data sets were not available during the presented case study.
A preliminary example of ground validation with radar measurements is presented in Fig. 7. Radar data (top) were collected by the S. Pietro Capofiume unit, owned by the Regional Environmental Agency of Emilia Romagna (ARPA-SIM ), and processed by the Regional Meteo-hydro Service (SIM). At radar original resolution (order of 1 km), differences in rate rates of one order of magnitude are found with respect to MICRA estimates (bottom).
However, a meaningful comparison has to take into account the fact that rain rate estimates by MICRA are limited by the relatively poor spatial resolution of both GEO-IR and LEO -MW measurements. Thus, radar spatial resolution needs to be degraded to the resolution achievable by satellite (order of 10 km).
If we average radar measurements in Figure 7 to match the satellite pixel resolution, and we consider only the area covered by the radar beam, we obtain what shown in Fig. 8. Now the qualitative comparison looks much better: areas of intense rain are fairly well detected and the difference of rain rate values is significantly reduced. Average errors are
of the order of 30% with an overall trend to underestimate the radar estimates.
Fig. 6. Available measurements from ground-based radar and raingauge
networks are used in the validation of MICRA.
Fig. 7. A comparison between rain rates as measured by ground-based
radar (top) and satellite-based MICRA technique (bottom). Original radar resolution, about 1 km, is shown.
From these first results it seems that the present implementation of MICRA tends to underestimate rain rates values. Further analysis is needed in order to optimize the algorithm parameterization, such as choices of sub-region size, spacing and look-back time lag. Results for NEREMIS show a similar behavior.
Fig. 6. Available measurements from ground-based radar and
rain-gauge networks are used in the validation of MICRA.
However, a meaningful comparison has to take into ac-count the fact that rain rate estimates by MICRA are lim-ited by the relatively poor spatial resolution of both GEO-IR and LEO-MW measurements. Thus, radar spatial resolution needs to be degraded to the resolution achievable by satellite (order of 10 km).
If we average radar measurements in Fig. 7 to match the satellite pixel resolution, and we consider only the area cov-ered by the radar beam, we obtain what shown in Fig. 8. Now the qualitative comparison looks much better: areas of in-tense rain are fairly well detected and the difference of rain rate values is significantly reduced. Average errors are of the order of 30% with an overall trend to underestimate the radar estimates.
From these first results it seems that the present implemen-tation of MICRA tends to underestimate rain rates values. Further analysis is needed in order to optimize the algorithm parameterization, such as choices of sub-region size, spac-ing and look-back time lag. Results for NEREMIS show a similar behavior.
5 Summary and future developments
The basic concepts of the MICRA technique have been in-troduced together with those of the NN based algorithm NEREMIS. A couple of case studies over the Mediterranean
Marzano, Cimini, Coppola, Verdecchia, Levizzani, Tapiador and Turk, “Satellite radiometric remote sensing ….”
July 11, 2005
4
Fig. 5. Top: Rain rate estimated by MICRA for 20 May 2003, 02:00 UTC. Bottom: 24-hour accumulated rain as computed from 1-day time series of MICRA rain rate estimates for 20 May 2003.
during 20-21 May 2003. Although qualitative results are
encouraging, a systematic validation would be needed. A
way to pursue this goal is by comparison with ground based
remote (radar) and in situ (raingauge networks)
measurements available for the areas under investigation, as
illustrated in Fig. 6. Unfortunately, both data sets were not
available during the presented case study.
A preliminary example of ground validation with radar
measurements is presented in Fig. 7. Radar data (top) were
collected by the S. Pietro Capofiume unit, owned by the
Regional Environmental Agency of Emilia Romagna
(ARPA-SIM), and processed by the Regional Meteo-hydro
Service (SIM). At radar original resolution (order of 1 km),
differences in rate rates of one order of magnitude are
found with respect to MICRA estimates (bottom).
However, a meaningful comparison has to take into
account the fact that rain rate estimates by MICRA are
limited by the relatively poor spatial resolution of both
GEO-IR and LEO-MW measurements. Thus, radar spatial
resolution needs to be degraded to the resolution achievable
by satellite (order of 10 km).
If we average radar measurements in Figure 7 to match
the satellite pixel resolution, and we consider only the area
covered by the radar beam, we obtain what shown in Fig. 8.
Now the qualitative comparison looks much better: areas of
intense rain are fairly well detected and the difference of
rain rate values is significantly reduced. Average errors are
of the order of 30% with an overall trend to underestimate
the radar estimates.
Fig. 6. Available measurements from ground-based radar and raingauge networks are used in the validation of MICRA.
Fig. 7. A comparison between rain rates as measured by ground-based radar (top) and satellite-based MICRA technique (bottom). Original radar resolution, about 1 km, is shown.
From these first results it seems that the present
implementation of MICRA tends to underestimate rain rates
values. Further analysis is needed in order to optimize the
algorithm parameterization, such as choices of sub-region
size, spacing and look-back time lag. Results for NEREMIS
show a similar behavior.
Fig. 7. A comparison between rain rates as measured by
ground-based radar (top) and satellite-ground-based MICRA technique (bottom). Original radar resolution, about 1 km, is shown.
Marzano, Cimini, Coppola, Verdecchia, Levizzani, Tapiador and Turk, “Satellite radiometric remote sensing ….”
Fig. 8. Same comparison as Figure 7, where radar data (top) have been averaged to match the satellite pixel resolution, and only the MICRA estimates within the area covered by the radar beam are considered (bottom).
5. Summary and future developments
The basic concepts of the MICRA technique have been
introduced together with those of the NN based algorithm
NEREMIS. A couple of case studies over the
Mediterranean basin have been discussed, through the
analysis of rain rate and accumulated rain fields as
estimated by MICRA and NEREMIS. In our first attempt of
validation of the MICRA technique, we found encouraging
results concerning the capability of the algorithm to detect
the raining cells.
From a quantitative point of view, MICRA seems to
underestimate rain rate values when compared to ground
based radar measurements. Possible sources of
underestimation might be related to algorithm
parameterization, such as the choice of sub-region size and
spacing or the look-back time lag, whose optimum values
have to be investigated in deeper detail.
A systematic validation of MICRA and NEREMIS
with ground-based measurements is planned, but their
intercomparison of estimated rain field shows encouraging
agreements. Inclusions of data derived from other sensors,
like MODIS and AMSR, are also foreseen.
Once that the algorithms have been tested and
validated, the resulting optimized version will be included
in a monitoring and forecast operational framework, using
the real-time data collected by the METEOSAT Primary
Data User Station (PDUS). The exploitation of Meteosat
Second Generation - High Rate Information Transmission
(HRIT) data is finally the challenging aim of a further
development and extension of the proposed techniques..
2000-00522) and by EU Risk-AWARE project. Support by
the Italian Space Agency (ASI), Ministry of Education and
Research (MIUR) and by the GNDCI-CNR project is also
acknowledged. Radar data were kindly provided by Dr. P.P.
Alberoni (ARPA-SIM, Bologna, Italy).
References
Bellerby T., M. Todd, D. Kniveton and C. Kidd, “Rainfall Estimation from a Combination of TRMM Precipitation Radar and GOES Multispectral Satellite Imagery through the Use of an Artificial Neural Network”, J. App. Met., vol. 39, pp. 2115-2128, 2000. Ferraro R.R.,”SSM/I derived global rainfall estimates for climatological
applications”, J. Geophys. Res., vol. 102, pp 16,715-16,735, 1997. Grimes D.I.F., E. Coppola , M. Verdecchia, G. Visconti, A neural network
approach to real time rainfall estimation for Africa using satellite data, J. Hydrometeorology, 6, 4, 1119-1133, 2003
Hsu K.L., X. Gao, S. Sorooshian and H.V. Gupta, “Precipitation estimation from remotely sensed information using artificial neural networks”, J. Appl. Meteor., vol. 36, pp. 1176-1190, 1997.
Kummerow C. and L. Giglio, “A method for combining passive microwave and infrared rainfall observations”, J. Atmos. Oceanic Tecnol., vol. 12, pp. 33-45, 1995.
Levizzani V., F. Porcù, F.S. Marzano, A. Mugnai, E.A. Smith, and F. Prodi, “Investigating a SSM/I microwave algorithm to calibrate METEOSAT infrared instantaneous rain-rate estimates” Meteor. Applications, vol. 3, pp. 5-17, 1996.
Marzano, F. S., M. Palmacci, D. Cimini, G. Giuliani and J. F. Turk, "Multivariate Statistical Integration of Satellite Infrared and Microwave Radiometric Measurements for Rainfall Retrieval at the Geostationary Scale", IEEE Trans. Geosci. Rem. Sens., vol. 42, n. 4, pp. 1018-1032, 2004.
Marzano, F. S., G. Giuliani, and D. Cimini, "Design of rapid update cycles of rain estimation: MICRA technique", 2nd-year Report of 5th-Framework EURAINSAT project, V. Levizzani Editor, Jan 2003. Marzano F.S., A. Mugnai and J. Turk, “Precipitation retrieval from
spaceborne microwave radiometers and combined sensors”, in Remote sensing of atmosphere and ocean from space, F.S. Marzano and G. Visconti Eds., Kluwer Academic Publ., Dordrecht (NL), pp. 107-126, 2002.
Marzano F.S., J. Turk, P. Ciotti, S. Di Michele, and N. Pierdicca, “Potential of combined spaceborne microwave and infrared radiometry for near real-time rainfall attenuation monitoring along earth satellite”, Int. J. Satell. Commun., vol. 19, n. 4, pp. 385-412, 2001.
Miller S.W., P.A. Arkin, and R. Joyce, “A combined microwave infrared rain rate algorithm”, Int. J. Remote Sensing, vol. 22, pp. 3285-3307, 2001.
Tapiador, F. J., C. Kidd, V. Levizzani, and F.S. Marzano, “A neural networks-based PMW-IR fusion technique to derive half hourly rainfall estimates at 0.1° resolution”, J. Appl. Meteor., vol. 43, pp. 576-594, 2004a.
Tapiador F.J., C. Kidd, K.L. Hsu, and F.S. Marzano, “Neural Networks in Satellite Rainfall Estimation”, Meteorological Applications, vol. 11, pp1-9, 2004b.
Turk J.F., G. Rohaly, J. Hawkins, E.A. Smith, F.S. Marzano, A. Mugnai, and V. Levizzani, “Meteorological applications of precipitation estimation from combined SSM/I, TRMM, and geostationary satellite data,” in Microwave Radiometry and Remote Sensing of the Environment, P. Pampaloni Ed., VSP Intern. Sci. Publisher, Utrecht (NL), pp. 353-363, 1999.
Vicente G.A., R.A. Cofield, and W.P. Menzel, “The operational GOES infrared rainfall estimation technique”, Bull. Amer. Meteor. Soc., vol. 79, pp 1883-1898, 1998.
Fig. 8. Same comparison as Fig. 7, where radar data (top) have
been averaged to match the satellite pixel resolution, and only the MICRA estimates within the area covered by the radar beam are considered (bottom).
basin have been discussed, through the analysis of rain rate and accumulated rain fields as estimated by MICRA and NEREMIS. In our first attempt of validation of the MICRA technique, we found encouraging results concerning the ca-pability of the algorithm to detect the raining cells.
272 F. S. Marzano et al.: Satellite radiometric remote sensing of rainfall fields From a quantitative point of view, MICRA seems to
un-derestimate rain rate values when compared to ground based radar measurements. Possible sources of underestimation might be related to algorithm parameterization, such as the choice of sub-region size and spacing or the look-back time lag, whose optimum values have to be investigated in deeper detail.
A systematic validation of MICRA and NEREMIS with ground-based measurements is planned, but their intercom-parison of estimated rain field shows encouraging agree-ments. Inclusions of data derived from other sensors, like MODIS and AMSR, are also foreseen.
Once that the algorithms have been tested and validated, the resulting optimized version will be included in a monitor-ing and forecast operational framework. The exploitation of Meteosat Second Generation - High Rate Information Trans-mission (HRIT) data is finally the challenging aim of a fur-ther development and extension of the proposed techniques. Acknowledgements. This work has been partially funded by the
EU Fifth-Framework EURAINSAT project (EVG2-2000-00522) and by EU Risk-AWARE project. Support by the Italian Space Agency (ASI), Ministry of Education and Research (MIUR) and by the GNDCI-CNR project is also acknowledged. Radar data were kindly provided by P. P. Alberoni (ARPA-SIM, Bologna, Italy). Edited by: L. Ferraris
Reviewed by: C. M. Medaglia and another referee
References
Bellerby, T., Todd, M., Kniveton, D., and Kidd, C.: Rainfall Esti-mation from a Combination of TRMM Precipitation Radar and GOES Multispectral Satellite Imagery through the Use of an Ar-tificial Neural Network, J. App. Met., 39, 2115–2128, 2000. Ferraro R. R.: SSM/I derived global rainfall estimates for
climato-logical applications, J. Geophys. Res., 102, 16 715–16 735, 1997. Grimes, D. I. F., Coppola, E., Verdecchia, M., and Visconti, G.: A neural network approach to real time rainfall estimation for Africa using satellite data, J. Hydrometeorology, 6, 4, 1119– 1133, 2003
Hsu, K. L., Gao, X., Sorooshian, S., and Gupta, H. V.: Precipita-tion estimaPrecipita-tion from remotely sensed informaPrecipita-tion using artificial neural networks, J. Appl. Meteor., 36, 1176–1190, 1997.
Kummerow, C. and Giglio, L.: A method for combining passive microwave and infrared rainfall observations, J. Atmos. Oceanic Tecnol., 12, 33–45, 1995.
Levizzani, V., Porc`u, F., Marzano, F. S., Mugnai, A., Smith, E. A., and Prodi, F.: Investigating a SSM/I microwave algorithm to calibrate METEOSAT infrared instantaneous rain-rate estimates, Meteor. Applications, 3, 5–17, 1996.
Marzano, F. S., Palmacci, M., Cimini, D., Giuliani, G., and Turk, J. F.: Multivariate Statistical Integration of Satellite Infrared and Microwave Radiometric Measurements for Rainfall Retrieval at the Geostationary Scale, IEEE Trans. Geosci. Rem. Sens., 42, 4, 1018–1032, 2004.
Marzano, F. S., Giuliani, G., and Cimini, D.: Design of rapid update cycles of rain estimation: MICRA technique, 2nd-year Report of 5th-Framework EURAINSAT project, edited by: Levizzani, V., Jan 2003.
Marzano, F. S., Mugnai, A., and Turk, J.: Precipitation retrieval from spaceborne microwave radiometers and combined sensors, in: Remote sensing of atmosphere and ocean from space, edited by: Marzano, F. S. and Visconti, G., Kluwer Academic Publ., Dordrecht (NL), 107–126, 2002.
Marzano, F. S., Turk, J., Ciotti, P., Di Michele, S., and Pierdicca, N.: Potential of combined spaceborne microwave and infrared ra-diometry for near real-time rainfall attenuation monitoring along earth satellite, Int. J. Satell. Commun., 19, 4, 385–412, 2001. Miller, S. W., Arkin, P. A., and Joyce, R.: A combined microwave
infrared rain rate algorithm, Int. J. Remote Sensing, 22, 3285– 3307, 2001.
Tapiador, F. J., Kidd, C., Levizzani, V., and Marzano, F. S.: A neural networks-based PMW-IR fusion technique to derive half hourly rainfall estimates at 0.1◦resolution, J. Appl. Meteor., 43, 576– 594, 2004a.
Tapiador, F. J., Kidd, C., Hsu, K. L., and Marzano, F. S.: Neural Networks in Satellite Rainfall Estimation, Meteorological Ap-plications, 11, 1–9, 2004b.
Turk, J. F., Rohaly, G., Hawkins, J., Smith, E. A., Marzano, F. S., Mugnai, A., and Levizzani, V.: Meteorological applications of precipitation estimation from combined SSM/I, TRMM, and geostationary satellite data, in: Microwave Radiometry and Re-mote Sensing of the Environment, edited by: Pampaloni, P., VSP Intern. Sci. Publisher, Utrecht (NL), 353–363, 1999.
Vicente, G. A., Cofield, R. A., and Menzel, W. P.: The operational GOES infrared rainfall estimation technique, Bull. Amer. Me-teor. Soc., 79, 1883–1898, 1998.