Analyse expérimentale de l'effet Morton
Texte intégral
Figure
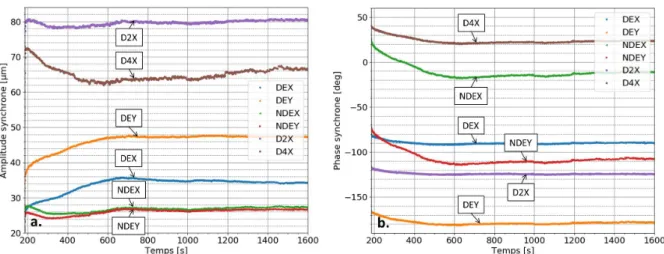
![Figure 1.6 – Vibrations synchrones mesurées au niveau du palier du coté libre[17].](https://thumb-eu.123doks.com/thumbv2/123doknet/7786301.259364/33.892.247.639.251.593/figure-vibrations-synchrones-mesurées-niveau-palier-coté-libre.webp)
![Figure 1.7 – Amplitude synchrone montrant le cyclage. Vitesse constante à 8400 tr/min à partir de 13h35 [18].](https://thumb-eu.123doks.com/thumbv2/123doknet/7786301.259364/34.892.176.711.109.341/figure-amplitude-synchrone-montrant-cyclage-vitesse-constante-partir.webp)




Documents relatifs
[r]
Avec son multiplicateur de ports intégré, vous pouvez installer jusqu’à sept disques (deux SSD M.2, cinq disques SATA) dans votre ordinateur grâce à ce contrôleur de disque
Il conviendra cependant , comme pour le palier 1 , que les collègues puissent disposer de documents d'accompagnement pour les aider d'autant que les changements qui sont imposés
● demo où l'on teste la connectivité entre deux postes séparés par un routeur. ● test entre les machines
On sait qu’il y a 18k segments en tout (chacune des 36 personnes en connaissant exactement k, cela donne 36k segments, mais chacun est ainsi compté deux fois).. Chacun des 18k
Quel est le rôle de la lentille à interposer entre la lampe et l’interféromètre afin d’obtenir des franges lumineuses et contrastées (on rappelle que le contraste est
The M2000 can run as a NIS client, slave, or master The ypinit command is used to establish the NIS role and specify NIS servers (for client and slave roles) If the system is to run
46.. d) When an IPv6 host uses stateful DHCP, which of the following information does it acquire:. A. its default gateway address D. its DNS
