Filtre de Kalman discret pour l'estimation des moyennes inconnues de bruits blancs
90
0
0
Texte intégral
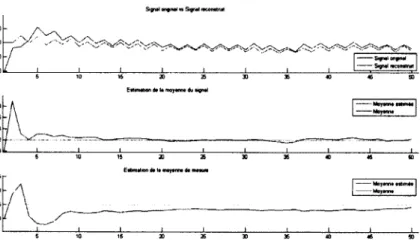
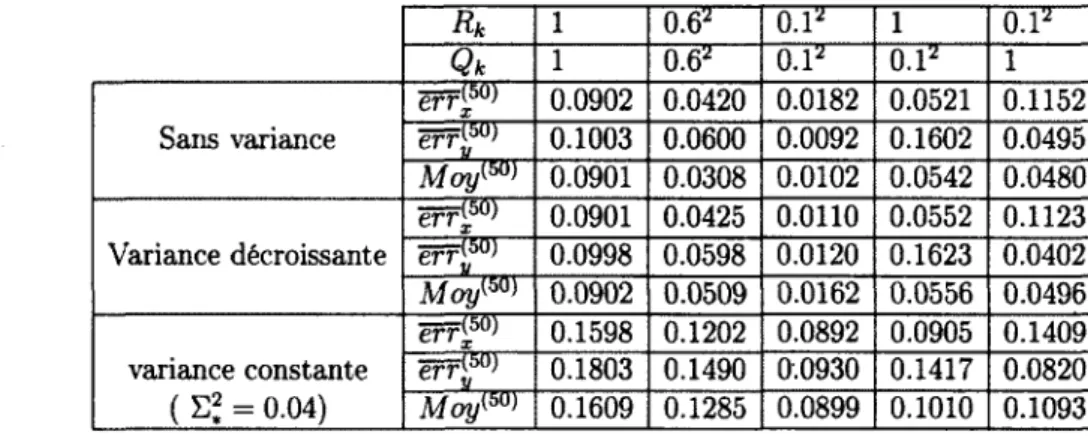
Figure
+7
Documents relatifs