Expérimentation d'une suite d'outils pour automatiser le passage d'une conception basée sur un modèle vers la réalisation d'une implémentation, en passant par l'exploration architecturale
110
0
0
Texte intégral
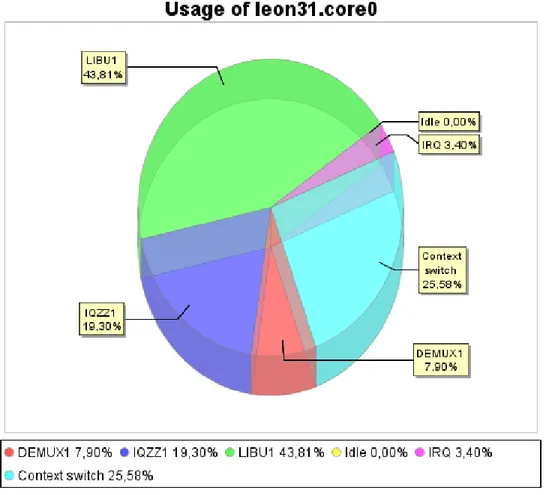
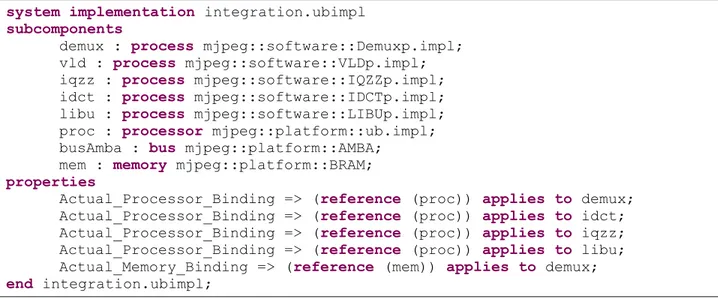
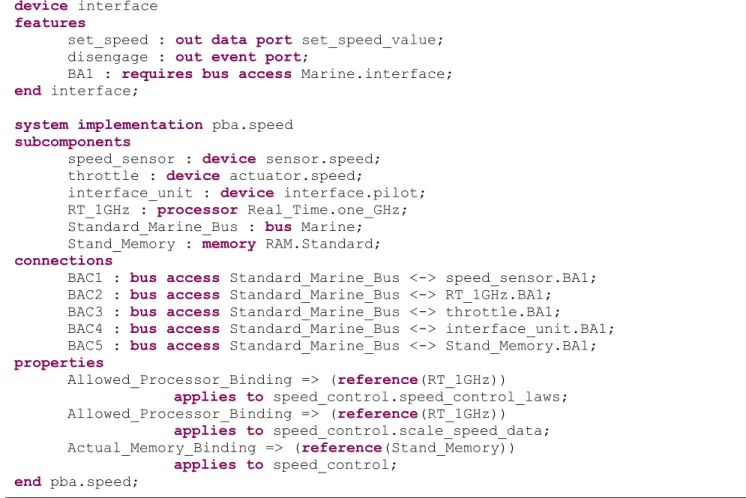
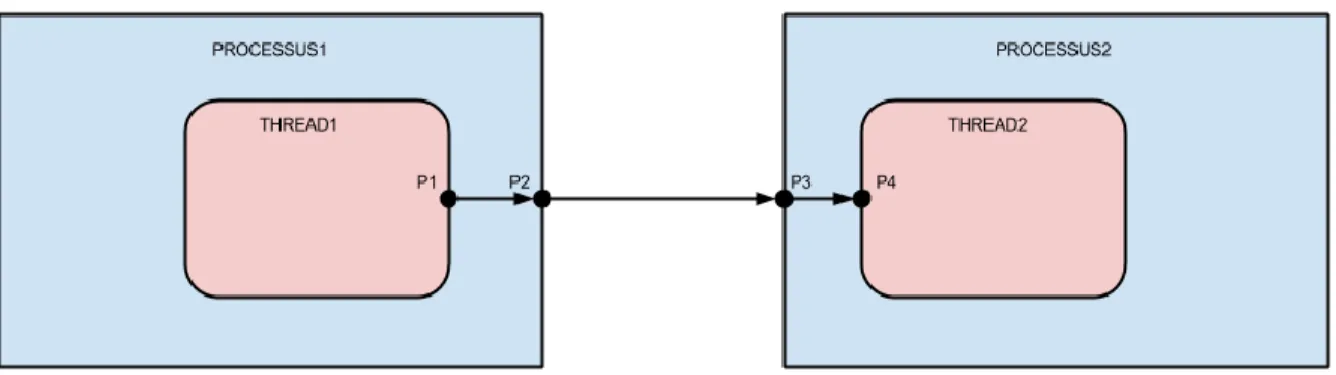
Figure
+7

Documents relatifs