VALÉRIE KIROUAC
DÉVELOPPEMENT DU POSITIONNEMENT
RELATIF TEMPOREL GPS EN TEMPS RÉEL
Mémoire présenté
à la Faculté des études supérieures de l’Université Laval dans le cadre du programme de maîtrise en sciences géomatiques
pour l’obtention du grade de Maître ès sciences (M.Sc.)
DÉPARTEMENT DES SCIENCES GÉOMATIQUES
FACULTÉ DE FORESTERIE, DE GÉOGRAPHIE ET DE GÉOMATIQUE UNIVERSITÉ LAVAL
QUÉBEC
2011
Résumé
Le positionnement relatif temporel (PRT) est une méthode de traitement des observations GPS encore peu exploitée. Le PRT fonctionne sous le même principe que le positionne-ment relatif GPS conventionnel excepté que la différence d’observations s’effectue entre deux époques consécutives recueillies par un même récepteur. Les erreurs qui varient rapidement avec le temps doivent donc être tenues en compte adéquatement, en particulier les erreurs d’orbites et d’horloges des satellites ainsi que l’erreur liée à la perturbation des signaux dans l’ionosphère.
La présente étude est une continuation des recherches de la méthode PRT de Michaud [2000] et de Balard [2003] effectuées au Centre de recherche en géomatique (CRG). Son but est d’améliorer la technique PRT et de la rendre accessible en temps réel, ce qui n’avait pas été effectué dans les recherches antérieures. Le défi est donc d’utiliser des corrections suffisamment précises et accessibles en temps réel.
La solution expérimentée est l’insertion dans le traitement PRT de certaines des corrections GPS•C, distribuées par le service CDGPS (Canada-Wide Differential GPS Service). La contribution bénéfique de ces corrections sur la précision d’un positionnement PRT est alors démontrée.
Dans cette recherche, la précision visée avec la méthode PRT en temps réel est de 30 centimètres (ou mieux) horizontalement pour des intervalles de temps les plus longs possibles. Les résultats obtenus démontrent que pour une période s’étendant jusqu’à 20 minutes cette précision est réalisable en mode PRT en appliquant des corrections GPS•C.
Abstract
Time Relative Positioning (TRP) is a GPS observation processing method that has not yet been used to its full potential. This processing method operates under the same principle as conventional relative GPS positioning method but rather than combining simultaneous observations taken from two receivers, it uses observations from a single receiver taken at two different epochs. However, the important time varying errors, notably the satellite clock and ephemerides errors, as well as the ionospheric delays, must be taken into account in an appropriate way.
This research is a continuation of two previous TRP research works carried out by the Centre for Research in Geomatics (CRG) by Michaud [2000] and Balard [2003]. The purpose of this present research is to improve the TRP method along with the development of the real-time capability, which has not been previously addressed. The challenge is to use accurate corrections available in real-time.
The experimental solution is to incorporate (some of the) GPS•C corrections in the TRP processing method. These corrections are broadcasted by the CDGPS service (Canada-Wide Differential GPS Service). The positive impact of these corrections on the accuracy of TRP solutions has been demonstrated.
The research objective is to attain, in real-time, a horizontal position accuracy of 30 centimetres or better for the longest possible time intervals. The test results show that for a period of up to 20 minutes, this accuracy is achievable by using GPS•C corrections with the TRP processing method.
Avant-propos
Ce travail de recherche n’aurait pu être concrétisé sans l’indispensable soutien de mon entourage tant au plan scientifique que personnel. Je tiens tout d’abord à remercier mon directeur de recherche Rock Santerre pour sa généreuse disponibilité et son brillant appui scientifique. J’apprécie tous les bénéfices que m’a apportés la présence du groupe GPS du CRG (Centre de recherche en géomatique), Stéphanie Bourgon pour ses conseils judicieux, Marc Cocard pour sa compétence et sa vivacité d’esprit, Simon Banville pour toutes les occasions où il a su m’aider, peu importe la distance séparant nos bureaux. Merci aux techniciens du laboratoire de GPS-Géodésie, Guy Montreuil et Jean-Claude Brière, qui m’ont aidé dans la réalisation de mes expérimentations sur le terrain.
Puis, je remercie l’équipe du Departement of Geodesy and Geomatics Engineering de l’Université du Nouveau-Brunswick à Frédéricton pour l’accueil cordial et la précieuse collaboration dont j’ai eu l’honneur de bénéficier. Plus spécialement, Richard B. Langley et Hyunho Rho sans qui le décodage du message GPS•C m’aurait été infiniment laborieux. La collecte de données n’aurait pu être réalisée sans le prêt du démodulateur CDGPS par la DRG (Direction de la référence géodésique, MRNFQ), un merci tout spécial à Yves Thériault. J’aimerais aussi souligner l’assistance des membres de RNCan pour leurs réponses à mes questions au sujet du message GPS•C et du service CDGPS, notamment Paul Collins et François Lahaye.
Merci au Réseau de centres d’excellence en géomatique (GEOIDE), dont j’ai bénéficié de l’aide financière, via le co-titulaire d’une subvention de recherche, Rock Santerre, dans le cadre d’un projet s’intitulant : Next-generation algorithms for navigation, geodesy and
earth sciences under modernized Global Navigation Satellite Systems (GNSS).
Finalement, je remercie ma famille, mes amis et du fond du cœur Marie-Hélène Desro-chers, pour leur soutien et leurs encouragements essentiels à l’aboutissement de ce projet.
Table des matières
Résumé ... i
Abstract ... ii
Avant-propos ... iii
Table des matières ... iv
Liste des tableaux ... vi
Liste des figures ... vii
Chapitre 1 : Introduction ... 1
1.1 Mise en contexte ... 1
1.2 Problématique actuelle du PRT ... 4
1.3 Recherches antérieures ... 5
1.4 But et objectifs de la recherche ... 10
1.5 Méthodologie ... 11
1.6 Contribution de la recherche ... 13
1.7 Contenu du mémoire ... 14
Chapitre 2 : Contexte théorique ... 16
2.1 Message GPS•C radiodiffusé par le CDGPS ... 16
2.1.1 Mode de fonctionnement ... 17
2.1.2 Corrections contenues dans le message GPS•C ... 21
2.1.3 Décodage du signal GPS•C ... 29
2.2 Description du processus de traitement PRT ... 31
2.3 Équation d’observations de phase ... 33
2.4 Détection des sauts de cycle ... 37
2.5 Compensation par moindres carrés (méthode de variation de paramètres) ... 39
Chapitre 3 : Description et analyse des résultats des sessions d’observations ... 44
3.1 Description des sessions d’observations ... 44
3.1.1 Sessions statiques ... 45
3.1.2 Session cinématique ... 51
3.2 Analyse des corrections GPS•C ... 53
3.2.1 Analyse de la disponibilité des corrections GPS•C ... 53
3.2.2 Analyse des différents types de corrections GPS•C ... 56
3.3 Présentation et analyse des résultats du traitement PRT ... 63
3.3.1 Sessions statiques ... 64
3.3.2 Session cinématique ... 74
Chapitre 4 : Contrôle de la qualité des données en temps réel ... 78
4.1 Analyse des matrices de variances-covariances ... 78
4.1.2 Session cinématique ... 89
Chapitre 5 : Conclusion ... 93
5.1 Résumé de la recherche ... 93
5.2 Recommandations et travaux futurs ... 96
Bibliographie ... 99
Annexe A : Graphiques des précisions et des erreurs « vraies » ... 102
A.1 Session #1 ... 102
A.1.1 Session #1, intervalle 20 minutes... 102
A.1.2 Session #1, intervalle 30 minutes... 105
A.2 Session #2 ... 108
A.2.1 Session #2, intervalle 20 minutes... 108
Liste des tableaux
Tableau 2.1 - Types de messages GPS•C MRTCA [CDGPS ICD, 2003] ... 23 Tableau 2.2 - Correspondance des GIVEI à leurs valeurs en mètres [CDGPS ICD, 2003] . 26 Tableau 3.1 - Résumé des sessions d’observations ... 45 Tableau 3.2 - Résumé des traitements PRT ... 63 Tableau 4.1 - Résumé des statistiques pour les précisions « observées » et les précisions
mises à l’échelle, session #1 (28 février 2008), δT : 10 minutes ... 83 Tableau 4.2 - Résumé des statistiques pour les précisions « observées » et les précisions
mises à l’échelle, session #1 (28 février 2008), δT : 20 minutes ... 84 Tableau 4.3 - Résumé des statistiques pour les précisions « observées » et les précisions
mises à l’échelle, session #1 (28 février 2008), δT : 30 minutes ... 84 Tableau 4.4 - Résumé des précisions pour la composante horizontale, session #1 (28 février 2008) ... 85 Tableau 4.5 - Résumé des statistiques pour les précisions « observées » et les précisions
mises à l’échelle, session #2 (23-24 juin 2008), δT : 10 minutes ... 87 Tableau 4.6 - Résumé des statistiques pour les précisions « observées » et les précisions
mises à l’échelle, session #2 (23-24 juin 2008), δT : 20 minutes ... 88 Tableau 4.7 - Résumé des statistiques pour les précisions « observées » et les précisions
mises à l’échelle, session #2 (23-24 juin 2008), δT : 30 minutes ... 88 Tableau 4.8 - Résumé des précisions pour la composante horizontale, session #2 (23-24
juin 2008) ... 88 Tableau 4.9 - Résumé des statistiques pour les précisions « observées » et les précisions
mises à l’échelle, session #3 (18 juillet 2008), δT : 10 minutes ... 91 Tableau 5.1 - Résumé des précisions « vraies » (s) (en mètre) de la composante horizontale
des résultats PRT ... 94 Tableau 5.2 - Niveau de confiance pour une solution de 30 centimètres ou mieux ... 94 Tableau 5.3 - Facteur de mise à l’échelle des précisions « observées » pour l’obtention d’un niveau de confiance de 95% pour la composante horizontale ... 96
Liste des figures
Figure 1.1 - Positionnement relatif conventionnel versus PRT ... 2
Figure 1.2 - Variation temporelle des erreurs [Balard, 2003] ... 7
Figure 1.3 - Erreurs des corrections d’orbites et d’horloges des satellites provenant du WAAS et du CDGPS [Rho et Langley, 2007]. ... 9
Figure 1.4 - Organigramme sommaire du processus de calculs développé ... 13
Figure 2.1 - Architecture du système CDGPS [RNCan, 2008] ... 18
Figure 2.2 - Couverture du satellite MSAT-1 [CDGPS, 2004] ... 19
Figure 2.3 - Zone de couverture du CDGPS [CDGPS, 2007] ... 21
Figure 2.4 - Grille ionosphérique générée par le système CDGPS [Rho et al., 2003] ... 25
Figure 2.5 - Interdépendance des messages [CDGPS ICD, 2003] ... 28
Figure 2.6 - Exemple d’un extrait de fichier de corrections GPS•C brutes ... 30
Figure 2.7 - Organigramme du traitement des observations en mode relatif temporel avec application des corrections GPS•C ... 31
Figure 3.1 - Site et antennes pour la collecte des observations en mode statique ... 46
Figure 3.2 - Installation pour la collecte des observations en mode statique ... 46
Figure 3.3 - Récepteur CDGPS et récepteur u-blox ... 47
Figure 3.4 - Nombre de satellites observés pour la session #1, mode statique (masque d’élévation à 15°) ... 48
Figure 3.5 - DOPs calculés pour la session #1, mode statique (masque d’élévation à 15°) . 49 Figure 3.6 - Nombre de satellites observés pour la session #2, mode statique (masque d’élévation à 15°) ... 50
Figure 3.7 - DOPs calculés pour la session #2, mode statique, (masque d’élévation à 15°) 51 Figure 3.8 - Installation du mobile pour la session #3, mode cinématique ... 52
Figure 3.9 - Nombre de satellites observés pour la session #3, mode cinématique, (masque d’élévation à 15°) ... 52
Figure 3.10 - DOPs calculés pour la session #3, mode cinématique (masque d’élévation à 15°)... 53
Figure 3.11 - Comparaison entre le nombre de satellites observés et le nombre de satellites avec corrections GPS•C disponibles, session #1 (masque d’élévation à 15°) ... 54
Figure 3.12 - Comparaison entre le nombre de satellites observés et le nombre de satellites avec corrections GPS•C disponibles, session #2 (masque d’élévation à 15°) ... 55
Figure 3.13 - Corrections GPS•C du délai ionosphérique en pente, session #1 ... 57
Figure 3.14 - Corrections GPS•C du délai ionosphérique en pente, session #1 (agrandissement de la figure 3.13) ... 58
Figure 3.15 - Corrections GPS•C du délai ionosphérique en pente, après corrections des sauts, session #1 ... 60
Figure 3.16 - Corrections d’orbites GPS•C pour la composante X (TM), session #3 ... 61
Figure 3.17 - Corrections d’horloges GPS•C, session #3 ... 62
Figure 3.18 - Résultats PRT, graphique et statistiques, de la session statique #1, pour l’intervalle de δT : 10 minutes ... 65
Figure 3.19 - Résultats PRT, graphique et statistiques, de la session statique #1, pour l’intervalle de δT : 20 minutes ... 67
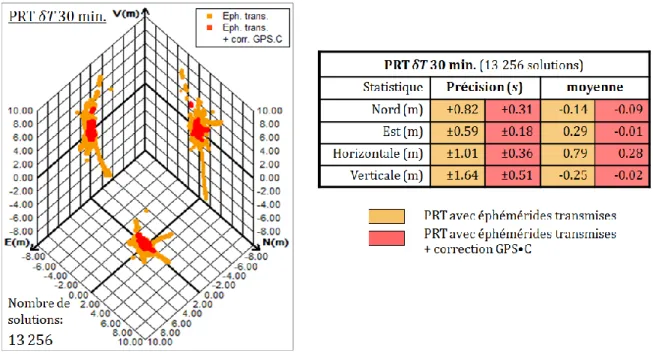
Figure 3.20 - Résultats PRT, graphique et statistiques, de la session statique #1, pour
l’intervalle de δT : 30 minutes ... 68 Figure 3.21 - Erreurs horizontales pour un PRT avec corrections GPS•C (28 février 2008)
... 69 Figure 3.22 - Résultats PRT, graphique et statistiques, de la session statique #2 pour
l’intervalle de δT : 10 minutes ... 70 Figure 3.23 - Résultats PRT, graphique et statistiques, de la session statique #2, pour
l’intervalle de δT : 20 minutes ... 71 Figure 3.24 - Résultats PRT, graphique et statistiques, de la session statique #2, pour
l’intervalle de δT : 30 minutes ... 72 Figure 3.25 - Erreurs horizontales pour un PRT avec corrections GPS•C (23-24 juin 2008),
session #2 ... 73 Figure 3.26 - Résultats PRT, graphique et statistiques, de la session cinématique #3, pour
l’intervalle de δT : 10 minutes ... 75 Figure 3.27 - Résultats PRT graphique et statistiques de la session cinématique #3 pour
l’intervalle de δT : 20 minutes ... 76 Figure 3.28 - Erreurs horizontales pour un PRT avec corrections GPS•C (18 juillet 2008) 77 Figure 4.1 - Précisions et erreurs « vraies », pour la composante NORD, session #1 (28
février 2008), δT : 10 minutes ... 81 Figure 4.2 - Précisions et erreurs « vraies », pour la composante EST, session #1 (28 février
2008), δT : 10 minutes ... 81 Figure 4.3 - Précisions et erreurs « vraies », pour la composante HORIZONTALE, session #1
(28 février 2008), δT : 10 minutes ... 82 Figure 4.4 - Précisions et erreurs « vraies », pour la composante VERTICALE, session #1 (28
février 2008), δT : 10 minutes ... 82 Figure 4.5 - Précisions et erreurs « vraies », pour la composante NORD, session #2 (23-24
juin 2008), δT : 10 minutes ... 85 Figure 4.6 - Précisions et erreurs « vraies », pour la composante EST, session #2 (23-24 juin
2008), δT : 10 minutes ... 86 Figure 4.7 - Précisions et erreurs « vraies », pour la composante HORIZONTALE, session #2
(23-24 juin 2008), δT : 10 minutes ... 86 Figure 4.8 - Précisions et erreurs « vraies », pour la composante VERTICALE, session #2
(23-24 juin 2008), δT : 10 minutes ... 87 Figure 4.9 - Précisions et erreurs « vraies », pour la composante NORD, session #3 (18 juillet
2008), δT : 10 minutes ... 89 Figure 4.10 - Précisions et erreurs « vraies », la composante EST, session #3 (18 juillet
2008), δT : 10 minutes ... 90 Figure 4.11 - Précisions et erreurs « vraies », pour la composante HORIZONTALE, session #3
(18 juillet 2008), δT : 10 minutes ... 90 Figure 4.12 - Précisions et erreurs « vraies », pour la composante VERTICALE, session #3
(18 juillet 2008), δT : 10 minutes ... 91 Figure A.1 - Précisions et erreurs « vraies », pour la composante NORD, session #1 (28
février 2008), δT : 20 minutes ... 102 Figure A.2 - Précisions et erreurs « vraies », pour la composante EST, session #1 (28 juin
2008), δT : 20 minutes ... 103 Figure A.3 - Précisions et erreurs « vraies », pour la composante HORIZONTALE, session #1
Figure A.4 - Précisions et erreurs « vraies », pour la composante VERTICALE, session #1 (28
février 2008), δT : 20 minutes ... 104 Figure A.5 - Précisions et erreurs « vraies », pour la composante NORD, session #1 (28
février 2008), δT : 30 minutes ... 105 Figure A.6 - Précisions et erreurs « vraies », pour la composante EST, session #1 (28 février
2008), δT : 30 minutes ... 106 Figure A.7 - Précisions et erreurs « vraies », pour la composante HORIZONTALE, session #1
(28 février 2008), δT : 30 minutes ... 106 Figure A.8 - Précisions et erreurs « vraies », pour la composante VERTICALE, session #1 (28
février 2008), δT : 30 minutes ... 107 Figure A.9 - Précisions et erreurs « vraies », pour la composante NORD, session #2 (23-24
juin 2008), δT : 20 minutes ... 108 Figure A.10 - Précisions et erreurs « vraies », pour la composante EST, session #2 (23-24
juin 2008), δT : 20 minutes ... 109 Figure A.11 - Précisions et erreurs « vraies », pour la composante HORIZONTALE, session #2
(23-24 juin 2008), δT : 20 minutes ... 109 Figure A.12 - Précisions et erreurs « vraies », pour la composante VERTICALE, session #2
(23-24 juin 2008), δT : 20 minutes ... 110 Figure A.13 - Précisions et erreurs « vraies », pour la composante NORD, session #2 (23-24
juin 2008), δT : 30 minutes ... 111 Figure A.14 - Précisions et erreurs « vraies », pour la composante EST, session #2 (23-24
juin 2008), δT : 30 minutes ... 112 Figure A.15 - Précisions et erreurs « vraies », pour la composante HORIZONTALE, session #2
(23-24 juin 2008), δT : 30 minutes ... 112 Figure A.16 - Précisions et erreurs « vraies », pour la composante VERTICALE, session #2
Chapitre 1 : Introduction
1.1 Mise en contexte
Plusieurs techniques de positionnement GNSS (Global Navigation Satellite Systems), dont le positionnement GPS américain, ont été mises au point afin de répondre à divers besoins de localisation. Bien sûr, selon les exigences et les contraintes du contexte de positionne-ment, les méthodes deviennent plus ou moins complexes et coûteuses. Le positionnement relatif temporel (PRT), par l’emploi d’un seul récepteur, figure parmi les méthodes de positionnement GNSS visant à augmenter la précision du positionnement sans pour autant augmenter les coûts ou la complexité des opérations. Pour bien comprendre les avantages et l’utilité de ce type positionnement au sein du marché actuel, voici dans un premier temps des explications générales sur les principes du PRT.
Le positionnement relatif temporel (PRT), ou Time Relative Positioning (TRP), est une méthode de traitement des observations GNSS plutôt récente et encore peu exploitée. Pour comprendre le principe de cette méthode, nous pouvons en faire l’analogie avec le positionnement relatif GNSS conventionnel (voir figure 1.1). Lorsque deux récepteurs GNSS observent simultanément les mêmes satellites, et que l’un d’eux se trouve sur un point connu, et que l’autre est sur un point inconnu, il est possible de déterminer la position du deuxième point par rapport au premier, soit la station de référence. En procédant de cette manière, certaines erreurs s’éliminent, en grande partie, dans le traitement en différence simple entre récepteurs. Parmi ces erreurs, on compte les erreurs d’horloges et d’orbites des satellites, ainsi que les erreurs reliées à la propagation des signaux GNSS dans l’atmosphère [Balard, 2003]. Le PRT fonctionne sous le même principe que le positionne-ment relatif conventionnel; excepté que dans le cas du PRT la différence des observations s’effectue entre deux époques consécutives (T et T+δT, voir figure 1.1), recueillies par un seul et même récepteur. Le processus de la méthode conventionnelle consiste à différencier deux observations d’une même époque, provenant de deux récepteurs distincts (partie
gauche de la figure 1.1).Le mode opérationnel du PRT, quant à lui, consiste à déplacer un même récepteur d’une station connue vers un ou plusieurs points inconnus (partie droite de la figure 1.1).
Figure 1.1 - Positionnement relatif conventionnel versus PRT
En suivant le mode opératoire du PRT, il est possible d’utiliser et de manipuler un seul récepteur. Ceci permet alors de diminuer les coûts et les opérations, par exemple des levés terrain, et ainsi d’augmenter la productivité.
Pour obtenir la meilleure précision possible, le traitement des observations en PRT s’effectue sur les mesures de phase de l’onde porteuse. Le choix des mesures de phase est dû à leur fine résolution de l’ordre de quelques millimètres. Malheureusement, les mesures de phase sont ambigües. C’est-à-dire, qu’elles introduisent dans le calcul d’une position une inconnue supplémentaire pour chaque satellite observé, rendant alors le traitement des observations plus complexe. Cette inconnue, appelée ambiguïté de phase initiale, se définit par la valeur du nombre entier de longueurs d’onde dans la distance initiale entre le récepteur et le satellite. Cette valeur demeure constante à condition qu’il n’y ait pas d’interruption dans l’acquisition du signal (saut de cycle). Si cette condition est remplie, l’ambiguïté de phase reste la même d’une époque à l’autre, donc s’élimine en PRT dans la
différence temporelle. Ainsi, il est possible d’obtenir un positionnement précis en calculant une différence temporelle sur les mesures de phase.
Tel qu’expliqué, les calculs sont réalisés à l’aide des mesures de phase, il est donc essentiel de tenir compte des sauts de cycle possibles au cours de la période d’observations. Ce qui signifie qu’il ne doit pas y avoir d’interruption dans la réception du signal lors du déplace-ment entre les deux stations. Dans le cas contraire, les sauts de cycle doivent être corrigés préalablement. Une autre contrainte du PRT provient de la variation, relativement rapide dans le temps, des erreurs inhérentes au positionnement GNSS (voir section 1.3). Parce que les erreurs fluctuent dans le temps, donc varient d’une époque à l’autre, la différence temporelle entre une paire d’époques combinées (T et T+δT) ne permet pas d’éliminer cette variation temporelle des erreurs.
Conséquemment, par rapport au positionnement relatif conventionnel, une source d’erreur supplémentaire est introduite dans le calcul d’une position en PRT. Comme la variation des erreurs entre une paire d’époques combinées croît avec le temps, il est difficile de réaliser un parcours sur une longue période et de maintenir une précision uniforme, à travers le temps, sur la position du mobile. En effet, la précision en PRT se dégrade avec le temps. Les principales erreurs, ayant un impact sur le positionnement GNSS et variant rapidement dans le temps, sont les erreurs d’horloges et d’orbites des satellites ainsi que le délai ionosphérique. Pour obtenir les meilleurs résultats possibles, il devient essentiel de bien modéliser la variation temporelle de ces erreurs.
Pour faire suite à ce survol concernant le mode de fonctionnement du PRT, voici mainte-nant les avantages et contraintes de cette méthode. Comme dans tous les domaines, il réside une confrontation perpétuelle entre la qualité et le prix d’un produit. Dans le monde du GNSS, il est possible d’atteindre un positionnement de haute précision à condition d’avoir en main l’équipement approprié, ce qui n’est pas nécessairement abordable pour tous. Actuellement, il est possible d’atteindre une précision centimétrique, grâce au GNSS, en employant le positionnement relatif, soit en post-traitement ou en temps réel (Real Time
Kinematic, RTK). Ces techniques nécessitent l’utilisation de deux récepteurs, ce qui
multiplie les coûts et les opérations. De plus en plus, les utilisateurs du GNSS exigent une position en temps réel, le post-traitement est donc souvent inadéquat pour beaucoup
d’applications. En mode RTK, un lien radio est nécessaire pour émettre et recevoir les corrections ce qui complexifie davantage les opérations et augmentent les coûts. De plus, une certaine distance maximale entre la base (station de référence) et le mobile doit être respectée. Ce type de système, quoique très précis, est très coûteux et n’est pas appropriée dans plusieurs contextes, tel que le positionnement de personnes. Les récepteurs GPS de poche, de plus en plus abordables et populaires au sein de la population, procurent cependant une précision de positionnement (quelques mètres) insuffisante pour plusieurs applications. Le positionnement satellitaire pourrait profiter à un bien plus grand nombre d’applications s’il était moins coûteux et plus simple d’utilisation, tout en gardant une précision de l’ordre de quelques décimètres, adaptée aux besoins, tel que peut l’offrir le PRT.
1.2 Problématique actuelle du PRT
Maintenant que la mise en contexte a été explicitée, il est opportun de décrire la probléma-tique actuelle du PRT. Tout d’abord, rappelons les points à combler en positionnement satellitaire pour le marché actuel. Les utilisateurs exigent de plus en plus l’obtention d’un positionnement en temps réel. De nombreux champs d’applications, nécessitant la localisation de personnes, requièrent une solution de positionnement simple et abordable. Plusieurs applications qui se réfèrent au positionnement d’une personne en mouvement demandent une précision de l’ordre de 30 centimètres. Par exemple, pour l’évaluation de différentes performances d’athlètes dans des épreuves sportives, pour le positionnement de joueurs dans les jeux vidéo mobiles ou pour le suivi de personnes âgées ou non autonomes afin d’assurer leur sécurité. Par les avantages que confère le positionnement relatif temporel, ces types d’applications seraient propices à en bénéficier. Toutefois, certaines limitations de cette méthode restent à considérer. À l’heure actuelle, aucune solution PRT n’offre la possibilité d’un positionnement en temps réel. De plus, la qualité de ce type de positionnement se dégrade avec le temps, ceci étant dû à la variation temporelle des erreurs.
De ce fait, il devient primordial de bien modéliser les erreurs inhérentes au positionnement GNSS, à l’aide de corrections disponibles en temps réel.
1.3 Recherches antérieures
La première apparition du positionnement relatif temporel remonte à 1995 dans un article de Ulmer et al. [1995]. La méthode PRT a été, au départ, développée pour la détermination de courts vecteurs. À cette date, les récepteurs GPS civils étaient soumis à la disponibilité sélective, dispositif de sécurité aboli le 2 mai 2000. En effet, avant cette date, l’armée américaine introduisait volontairement des erreurs dans les données satellitaires dans le but de restreindre l’accès au plein potentiel du GPS. Toutefois, pour leurs travaux, les auteurs ont employé des récepteurs GPS militaires qui n’étaient pas affectés par la disponibilité sélective. Une des applications était notamment l’orientation de l’artillerie dans les endroits où la présence de points géodésiques était rare. Pour que le PRT se compare à la méthode de positionnement relatif conventionnel, les auteurs émettent deux conditions indispen-sables. Dans un premier abord, la géométrie des satellites ne doit pas changer significati-vement entre les deux époques combinées. La seconde condition exige que les erreurs intrinsèques au positionnement GPS soient les mêmes pour les deux époques combinées. En réalité, ces deux conditions ne sont pas satisfaites. C’est pourquoi la précision du positionnement, en mode PRT, se détériore avec le temps.
La méthode de traitement PRT a fait l’objet de deux projets de recherche réalisés à l’Université Laval pour des applications civiles. Le premier s’intitulant Investigation d’une
nouvelle approche de positionnement relatif temporel avec GPS et avec GLONASS par
Stéphanie Michaud en 2000 et le second Positionnement relatif temporel en quasi-temps
réel avec corrections par fermeture de cheminement par Nicolas Balard en 2003.
Dans les travaux de Michaud [2000], plusieurs tests ont été réalisés suivant différentes variables. Principalement, le traitement en PRT a été réalisé avec des observations GPS avec ou sans disponibilité sélective, à partir de données provenant du système de
position-nement russe, GLONASS, ainsi qu’à l’aide des observations GPS et GLONASS combi-nées. Chaque traitement de données considérait la fréquence L1 uniquement. Bien entendu, les résultats les plus intéressants sont ceux réalisés avec les jeux de données exempt de la disponibilité sélective. Dans cette recherche, tous les calculs étaient réalisés en post-traitement. Suite au retrait de la disponibilité sélective, une réévaluation des performances PRT à été réalisée [Michaud et Santerre, 2001]. Selon les expériences réalisées, le mode relatif temporel s’est prêté avec succès dans la détermination de courts vecteurs. En effet, en utilisant un seul récepteur mono-fréquence sur un intervalle de temps de 30 secondes, une précision centimétrique peut être obtenue. De plus, en augmentant l’intervalle de temps à 70 secondes, la précision est au-delà des dix centimètres. Il est à noter que la correction ionosphérique à été considérée en appliquant les modèles ionosphériques IONEX du service de l’IGS (International GNSS Service). Tandis que les calculs d’orbites et d’erreurs d’horloges des satellites ont été réalisés à l’aide des éphémérides transmises seulement. Dans le but d’améliorer la précision du PRT [Balard, 2003; Balard et al., 2006], il a été prouvé qu’il est possible de modéliser la variation des erreurs sur un cheminement fermé de courte durée. Pour ce faire, l’utilisateur doit terminer son cheminement en retournant sur son point de départ, qui est le point de référence (ou sur un autre point géodésique). Connaissant l’erreur de fermeture (observée) sur le point de référence à la fin du chemine-ment, la position de chacun des points observés au cours du trajet peut être corrigée en redistribuant l’erreur de fermeture obtenue. Par contre, ceci implique que le résultat ne soit obtenu qu’en post-traitement à la fin du parcours aller-retour (en quasi temps réel). Ces travaux de recherche ont démontré que pour un cheminement avec fermeture d’une durée de dix minutes, le bilan des erreurs sur la position de la station inconnue peut être réduit d’un facteur d’environ quatre grâce aux corrections par fermeture de cheminement.
Les travaux de recherche d’Olynik [2002] portaient sur la variation temporelle des différentes erreurs liées au positionnement GPS. Les caractéristiques de la variation temporelle, des erreurs d’orbites et d’horloges des satellites, puis des erreurs ionosphé-riques, ont été indépendamment analysées. La valeur RMS (Root Mean Square) de la variation des erreurs d’orbites augmente linéairement en fonction du temps. Pour un intervalle de temps de 30 minutes, la moyenne des RMS des composantes en trois
dimen-sions était de 70 cm. L’amplitude de la variation de l’erreur est très similaire d’une journée à l’autre. Les erreurs d’horloges des satellites augmentent également en fonction du temps, cependant elles ne suivent pas une tendance linéaire. Les recherches prouvent également qu’il y a une différence marquée entre les performances des horloges des satellites dépendamment du bloc auxquelles ils appartiennent. La moyenne des RMS, pour la variation des erreurs d’horloges, passe de 7 à 29 cm selon le bloc considérant une période de 30 minutes. Également, dans le cas des erreurs d’horloges, la valeur des variations s’apparente pour des journées différentes. D’un autre côté, la variation de l’erreur ionosphé-rique diffère d’un jour à l’autre. En fonction de l’état de l’activité ionosphéionosphé-rique, la moyenne des RMS, sur une période de 50 secondes, joue entre 4 et 25 cm. La variation de l’erreur ionosphérique augmente significativement lorsque l’angle d’élévation du satellite diminue.
La variation temporelle des erreurs a également été étudiée dans les travaux de Balard [2003]. La figure 1.2 illustre ce phénomène dans le cas des erreurs d’horloges et d’orbites ainsi que pour le délai ionosphérique. D’après cette figure, pour une courte période de temps (8 minutes), le RMS de la variation des erreurs d’orbites et d’horloges atteint le décimètre, pendant que le RMS de la variation du délai ionosphérique atteint déjà le demi-mètre.
Dans un article sur le PRT publié par Odijk et al. [2007], la technique de PRT, en post-traitement, a été utilisée dans l’optique d'étudier précisément certaines parties de la trajectoire de vol d’un avion. La méthode PRT a également été utilisée pour analyser des manœuvres bien ciblées telles que le décollage, l’atterrissage et toutes opérations caractéri-sant la mécanique de vol d’un aéronef. Dans les expérimentations réalisées, un récepteur mono-fréquence a été exploité pour une session d’observations en mode statique et pour deux sessions en mode cinématique. Lors des tests en mouvement, l’avion subit de grandes variations d’altitude, Il est alors primordial de bien contrôler l’impact du délai troposphé-rique. Pour y arriver, les chercheurs ont utilisé le modèle troposphérique UNB3 développé à l’Université du Nouveau-Brunswick. Afin d’améliorer le calcul de la position des satellites, des corrections précises, provenant du CODE (Center for Orbit Determination in
Europe), ont été incluses dans le traitement des données. Les conclusions de l’étude
dévoilent que l’approche de traitement en différence temporelle, utilisant les mesures de phase d’un récepteur GPS mono-fréquence peu dispendieux, confère une précision relative décimétrique ou au-delà du centimètre par rapport au point de départ sur une trajectoire de quelques minutes.
D’autres résultats PRT ont été divulgués dans un article subséquent des mêmes auteurs [Traugott et al., 2008]. Dans ce dernier, une des expérimentions a été réalisée à l’aide d’un avion de voltige qui recueillait des mesures de phase sur la fréquence L1 à une cadence de 10 Hz. Ces données ont été traitées en différence temporelle, en utilisant les éphémérides précises, les corrections d’horloges des satellites à taux d’échantillonnage élevé et les grilles de corrections ionosphériques de l’IGS. Les positions obtenues ont été comparées avec une solution RTK. La solution du PRT a fourni un écart maximal de 13 cm pour un intervalle de temps de 110 secondes.
Dans les recherches et les travaux antérieurs aucune des solutions PRT suggérées n’offre la possibilité du temps réel. Actuellement, il existe diverses sources de correction, pour les signaux GNSS, distribuées en temps réel. Une des formes de correction possible provient d’un système augmenté dit à grande étendue. L’objectif de ce type de système est de fournir différentes corrections aux utilisateurs en vue d’améliorer la qualité de leur position en temps réel. Parmi ces systèmes, le plus connu est sans doute le WAAS (Wide-Area
Augmentation System), géré par la FAA (Federal Aviation Administration) américaine.
Similaire au WAAS, il existe un système canadien, appelé CDGPS (Canada-Wide
Differential GPS Service), diffusant des corrections en temps réel sous différents formats,
dont le GPS•C. Pour cette recherche, l’avantage de travailler avec le CDGPS, par rapport au WAAS, est principalement l’accessibilité aux informations concernant les détails du format GPS•C. De plus, selon les recherches de Rho et Langley [2007], les corrections d’orbites et d’horloges des satellites provenant du système CDGPS sont plus précises. Les graphiques de la figure 1.3 appuient cette affirmation. En effet, sur les graphiques de gauche, les écarts ont été obtenus en comparant les résultats avec les corrections de NGA (National Geospatial-Intelligence Agency) et ceux des graphiques de droite par rapport aux corrections précises de l’IGS. La courbe en vert se réfère aux corrections GPS•C, tandis que la courbe en rouge est celle liée aux corrections WAAS. Les corrections, issues du message GPS•C, semblent beaucoup plus stable dans le temps que les corrections du système WAAS.
Figure 1.3 - Erreurs des corrections d’orbites et d’horloges des satellites provenant du WAAS et du CDGPS [Rho et Langley, 2007].
1.4 But et objectifs de la recherche
Le but de cette recherche est de développer et d’évaluer une méthodologie abordable qui permettra à un utilisateur de bénéficier d’un positionnement relatif temporel, et ce en temps réel. Pour arriver à ce but, les objectifs spécifiques décrits dans les paragraphes suivants doivent être atteints.
Tel qu’abordé à la section 1.1, le PRT consiste à différencier deux observations d’époques subséquentes. Les erreurs entachant le positionnement GPS varient avec le temps. Bien sûr, pour permettre un PRT en temps réel, il est essentiel d’employer des corrections fiables, suffisamment précises temporellement et disponibles en temps réel.
Le premier objectif de cette recherche est d’analyser l’impact des corrections GPS•C, sur l’amélioration de la qualité d’un positionnement GPS avec la méthode PRT. Ces correc-tions sont actuellement diffusées par le CDGPS en temps réel gratuitement à l’échelle du Canada grâce à un satellite géostationnaire. Plus de détails à ce sujet sont fournis à la section 2.1.
Dans le cadre de cette recherche, la précision minimale visée avec la méthode PRT est de 30 centimètres horizontalement, pour un niveau de confiance de 95%, et ce en temps réel. Cette précision s’avère suffisante pour la plupart des applications de positionnement, de localisation et de navigation requérant la position d’une personne en mouvement. Tel que mentionné précédemment, en PRT la qualité de la position se dégrade avec le temps. Ce qui conduit au second objectif de cette recherche, c’est-à-dire de quantifier la plus longue période de temps permettant de conserver une précision horizontale minimum de 30 cm (95% de confiance) avec la méthode PRT.
Cette recherche vise à combler des champs d’applications nécessitant le positionnement d’un mobile, mais dont le budget ne permet pas l’achat de récepteurs GPS dispendieux et/ou difficile d’utilisation pour le commun des mortels. Tel que discuté précédemment, la méthode PRT utilisant un seul récepteur mono-fréquence, est en soit une méthode qui réduit les coûts et les opérations. Un troisième objectif est alors d’évaluer la méthode PRT
avec des récepteurs mono-fréquence, à prix modique, créant alors une solution abordable, favorisant la démocratisation du positionnement GNSS.
1.5 Méthodologie
Dans un premier temps, les corrections GPS•C devront être intégrées au processus de traitement PRT. Un logiciel permettant le traitement PRT incluant les corrections GPS•C a alors été mise au point. Pour le traitement en PRT proprement dit, un logiciel avait été développé par Stéphanie Michaud dans le cadre de sa recherche [Michaud, 2000]. Dans le but de répondre aux objectifs de cette recherche, celui-ci a été récupéré afin d’être modifié, pour finalement être codé dans un autre langage de programmation. Tel qu’il a déjà été mentionné, le traitement s’effectue sur les mesures de phase. Dans le cadre de cette recherche, les mesures sur la fréquence L1 seulement seront considérées. Les détails et des précisions théoriques du processus de traitement des données en positionnement relatif temporel se retrouvent à la section 2.2. Les données provenant du service CDGPS sont décodées à l’aide de sous-routines qui ont été fournies par Hyunho Rho, un étudiant au doctorat de l’Université du Nouveau-Brunswick. Une fois le message décodé, il est possible d’y extraire les corrections voulues. Dans le cas présent, ce sont les corrections sur le délai ionosphérique, ainsi que les corrections d’orbites et d’horloges des satellites qui sont préconisées. Pour discerner la période maximale de temps où la qualité du positionne-ment coïncide à la précision visée, c’est-à-dire 30 centimètres horizontalepositionne-ment, différents intervalles de temps ont été testés dans le traitement en PRT pour chacune des expérimenta-tions terrain. Notons que le logiciel ne fonctionne pas actuellement en temps réel, par contre toutes les données utilisées sont disponibles en temps réel. La figure 1.4 illustre le résumé des principales étapes de la méthodologie utilisée dans les travaux de cette étude. Pour valider et analyser l’impact de l’intégration des corrections GPS•C sur une solution PRT, des expérimentations terrain sont requises. Deux types de données sont essentiels à recueillir pour chacun des tests effectués. D'abord, les données brutes GPS, qui compren-nent les observations ainsi que les éphémérides transmises et deuxièmement les corrections
GPS•C. Le format des données GPS•C renferme plusieurs types de corrections ayant différents contenus, résolutions et mises à jour. Dans le cadre de cette recherche, les types de message préconisés se réfèrent aux erreurs d’horloges et d’orbites des satellites ainsi que les corrections liées au délai ionosphérique. Pour plus de détails à ce sujet, se référer à la section 2.1. Dans la présente étude, ces corrections ont été recueillies à l’aide d’un démodulateur, appelé récepteur CDGPS. Deux récepteurs GPS de différentes gammes de prix ont servi à la collecte des observations GPS. La cadence d’enregistrement a été réglée à la seconde pour tous les tests.
Au total, trois expérimentations ont servi à vérifier les objectifs de cette recherche. Dans un premier temps, pour mieux contrôler et analyser les résultats, les observations ont été collectées sur une période de 24 heures, en mode statique, sur un point connu. Deux différentes sessions d’observations statiques ont été réalisées. La première a été complétée à l’aide d’un récepteur géodésique double-fréquence (session #1). Étant donné qu’un des objectifs de cette étude est de fournir une solution abordable, la deuxième collecte de données a été accomplie à l’aide d’un récepteur mono-fréquence à prix modique (session #2). Les résultats de ces deux jeux de données peuvent aisément être comparés aux coordonnées du point stationné, qui sont précisément connues. Malgré qu’en pratique les tests aient été effectués en mode statique, le traitement des données a été réalisé comme si l’utilisateur était en mode cinématique. Puisque que la présente étude vise la localisation d’une personne mobile, un essai en mode cinématique, avec le récepteur bas de gamme, a aussi été réalisé (session #3). Ce test en mode cinématique a été effectué à une distance approximative de 650 mètres d’une station connue, qui enregistre des données GPS de façon permanente. La période d’enregistrement du mobile totalise une durée d’environ 25 minutes. En traitant les vecteurs formés par le mobile et la station connue, il est possible de connaître précisément la position de chacun des enregistrements recueillis au cours du trajet. Dans ce cas, le calcul des observations a été réalisé à l’aide d’un logiciel commercial de post-traitement de données GPS. Ayant les coordonnées connues en tous points du parcours, l’analyse de la précision du positionnement, issue du traitement PRT en mode cinématique, devient ainsi possible.
Figure 1.4 - Organigramme sommaire du processus de calculs développé
1.6 Contribution de la recherche
La contribution essentielle de cette recherche est sans doute le développement d’une méthode de positionnement relatif temporel permettant le temps réel. Cette étude apporte également de l’information à propos de l’impact des différentes corrections GPS•C sur la qualité d’un PRT. Les travaux de cette recherche conduisent aussi au développement d’un logiciel de traitement en PRT utilisant les corrections GPS•C disponibles en temps réel.
Corrections GPS•C Données brutes GPS Collecte de données Observations de phase sur L1 + Éphémérides Délai ionosphérique + Corrections d’orbites et d’horloges des satellites
Décodage
Choix d’un intervalle
de temps Traitement PRT
Position calculée Position « vraie »
Étant donné que la méthode PRT s’avère simple d’utilisation au niveau des opérations terrain et qu’elle est abordable, une multitude d’applications pourraient en profiter. Par exemple, pour déterminer un court vecteur permettant de calculer une visée de référence pour un levé conventionnel à la station totale. Le PRT se prêterait aussi bien dans l’évaluation de performances sportives se déroulant à l’extérieur. Peu d’entraîneurs sont prêts à investir de l’argent pour l’achat de deux récepteurs GPS haut de gamme, cependant l’achat d’un seul récepteur pourrait en convaincre plus d’un. Un autre champ d’application intéressant est le positionnement de console de jeux vidéo mobiles dans un espace de jeu extérieur. Le suivi de personnes âgées pour leur sécurité et éventuellement pour le guidage de personnes aveugles sont d’autres possibilités. Enfin, le PRT en temps réel pourrait s’insérer dans toute application ayant pour but la localisation d’une personne, d’un animal ou même d’un objet mobile, exigeant une précision de l’ordre de 30 cm, dans un environ-nement extérieur. Bien sûr, tel qu’il sera discuté plus loin, la méthode renferme des limites quant à la durée d’observations. Toutefois, les travaux futurs suggérés au dernier chapitre pourraient repousser cette limite et ouvrir le PRT à d’autres avenues.
1.7 Contenu du mémoire
Le chapitre deux contient des informations d’ordre théorique. La première section regroupe toute l’information sur le message GPS•C radiodiffusé par le service CDGPS. Cette section débute par des explications sur son mode de fonctionnement pour en arriver aux détails donnés quant aux différentes corrections diffusées. La dernière partie de cette section se termine par des clarifications sur la façon dont le message a été décodé afin d’y extraire les corrections requises dans le cadre de cette recherche. La section 2.2 contient des explica-tions sur le processus de traitement des données en PRT. Suivi par une section sur les détails de l’équation d’observations de phase utilisée pour le calcul en PRT. La détection des sauts de cycle fait l’objet de la section 2.4. Finalement, une dernière section permettra de connaître les détails du calcul des précisions utilisé dans cette étude.
Le chapitre trois renferme la description et l’analyse de toutes les sessions d’observations effectuées au cours de cette étude. Tout d’abord, les deux sessions en mode statique, suivi de celle en cinématique, y sont décrites. Plus de détails sur les opérations empruntées et le matériel utilisé lors des expérimentations seront dévoilés. Les sites d’observations seront également décrits. Ensuite, la section 3.2 fait part d’une analyse des corrections essentielles aux présents travaux, c’est-à-dire les corrections ionosphériques ainsi que les corrections d’orbites et d’horloges des satellites. Ces corrections sont extraites du produit GPS•C. La dernière section de ce chapitre est consacrée à la présentation et l’analyse des résultats des observations.
Le quatrième chapitre porte sur le contrôle de qualité des données en présumant que l’application fonctionne en temps réel. Bien sûr, le contrôle de la précision du positionne-ment pour un utilisateur devient un élépositionne-ment très important pour une application en temps réel. Ce chapitre est subdivisé en deux parties dont la première inclut l’analyse des erreurs par rapport aux éléments des matrices de variances-covariances pour les sessions en mode statique et la seconde pour celle effectuée en mode cinématique.
Finalement, une conclusion des présents travaux résumant les résultats de la recherche est rendue au dernier chapitre. Certaines recommandations et travaux futurs reliés à cette étude sont suggérés menant à des améliorations qui pourraient faire du PRT une méthode encore plus robuste et convoitée.
L’annexe A présente des graphiques supplémentaires sur l’évaluation de la précision des résultats PRT, dont les détails sont fournis au chapitre 4.
Chapitre 2 : Contexte théorique
Ce chapitre dresse un portrait détaillé à propos du contexte théorique sur lequel s’assoie l’exécution des tests terrain et le développement du traitement des données. D’abord, un survol sur le principe de fonctionnement du service CDGPS est nécessaire afin d’arriver à la présentation des différentes corrections GPS•C qu’il distribue. Ensuite, les différentes étapes de traitement menant au calcul d’une solution PRT seront décrites. Puis, suivront les détails de l’équation d’observations de phase, des équations pour la détection des sauts de cycle et des équations reliées à la compensation par moindres carrés, toutes intervenant dans le processus de traitement PRT.
2.1 Message GPS•C radiodiffusé par le CDGPS
Pour en arriver à effectuer le traitement des données en PRT et afin d’y ajouter diverses corrections provenant du message GPS•C, il est nécessaire de présenter plusieurs équations et différentes explications reliés au système CDGPS, duquel provient les corrections GPS•C. Cette section débute par des explications sur le mode de fonctionnement général du service CDGPS. Suite à l’introduction de ce système, des détails sont apportés sur les différents messages diffusés par ce dernier. Ensuite, plus de précisions sont fournies sur les spécifications des corrections nécessaires aux présents travaux de recherche, suivi de la description de la méthode d’intégration de ces corrections permettant de calculer la position corrigée. Finalement, le moyen employé pour le décodage de ces corrections est abordé à la fin de cette section.
2.1.1 Mode de fonctionnement
Le service CDGPS (Canada-Wide Differential GPS Service) a été mis au point dans le cadre d’un partenariat entre l’ensemble des provinces du Canada, le Nunavut et le gouver-nement fédéral [Kassam et al., 2002]. Le CDGPS utilise une technologie dite à grande étendue. Ce service est offert gratuitement, en temps réel et de façon permanente, à l’échelle du Canada. Le service CDGPS canadien rend accessible aux utilisateurs des corrections GPS•C permettant l’amélioration de la qualité de leur positionnement GPS, accordant une précision d’environ un mètre pour les récepteurs mono-fréquence. La production des corrections GPS•C sollicite la participation d’essentiellement trois compo-santes, un réseau de stations GPS, une centrale de traitement de données et différents liens de communication permettant la diffusion et le transfert des informations.
Les corrections diffusées sont dérivées grâce à plusieurs composantes du Système canadien de contrôle actif (Canadian Active Control System, CACS) de la Division des levés géodésiques de Ressources naturelles Canada (NRCan, en anglais). Cette infrastructure inclue 29 stations de référence de haute précision. Ces stations sont réparties, pour la plupart, sur le territoire canadien (voir figure 2.1). Les données recueillies à ces différents points de contrôle sont ensuite émises à des stations maîtresses qui calculent les différentes corrections liées au signal GPS. Une fois les calculs complétés, les données sont transmises aux satellites MSAT-1 et MSAT-2, le second étant un satellite de rechange. Ces satellites sont géostationnaires et ils diffusent en temps réel les corrections vers les utilisateurs. Pour être en mesure de bénéficier de ces corrections, le récepteur GPS utilisé par l’observateur doit être muni d’un démodulateur CDGPS. Ce dernier, conçu pour être portable, offre trois options quant au format de sortie des données:
1. Position corrigée, selon le SCRS (Système canadien de référence spatiale), en for-mat NMEA (National Marine Electronics Association).
2. Flux de corrections différentielles locales en format RTCM-104 (Radio Technical
3. Format GPS•C suivant la norme RTCA-159 (Radio Technical Commission for
Aeronautics) modifié, c’est-à-dire : MRTCA.
Le dernier format de données a été utilisé pour les présents travaux. Ce format permet d’extraire les corrections à l’état brut afin de les manipuler et de les appliquer tel que désiré. Ce message GPS•C inclut différentes corrections, décrites plus en détail à la section 2.1.2. L’architecture de tout le système CDGPS et son mode de fonctionnement, expliqué ci-haut, sont résumés par l’illustration de la figure 2.1.
Figure 2.1 - Architecture du système CDGPS [RNCan, 2008]
Tel que mentionné plus haut, le satellite MSAT-1 (Mobile SATtellite) est un satellite géostationnaire, opéré par MSV (Mobile Satellite Ventures). Par définition, l’orbite de ce type de satellite s’inscrit dans le plan équatorial de la Terre. Un satellite géostationnaire possède une période de révolution égale à la période de rotation de la Terre. Les caractéris-tiques propres au satellite géostationnaire permettent d’offrir des corrections en temps réel aux utilisateurs. En effet, sa vitesse angulaire étant la même que celle de la Terre, le satellite apparaît stationnaire pour un observateur terrestre. Donc, sous un ciel dégagé d’obstruction, MSAT-1 est théoriquement visible en tout temps. Ce satellite est situé
approximativement à la longitude 106,5° Ouest et à une altitude de 35 785 km. Dépen-damment de la position de l’utilisateur, le satellite MSAT-1 est observé sous différents azimuts et différents angles d’élévation, la figure 2.2 démontre ce phénomène. Par le fait même, en se dirigeant vers les hautes latitudes, l’angle d’élévation du satellite devient de plus en plus près de l’horizon.
Figure 2.2 - Couverture du satellite MSAT-1 [CDGPS, 2004]
Selon l’emplacement géographique des expérimentations terrain (campus de l’Université Laval), le satellite MSAT-1 était visible suivant un azimut d’environ 224° et un angle d’élévation approximatif de 26° à partir de l’horizon.
Notons qu’il a récemment été annoncé que le service CDGPS ne diffusera plus ses corrections via le satellite MSAT à partir du 31 mars 2011. Plusieurs solutions alternatives de distribution des corrections sont en cours de discussion, mais aucune n’a encore été fixée à l’heure actuelle. Voici les quelques options envisageables pour la distribution des données GPS•C selon le ministère des Ressources naturelles du Canada :
1. Acquérir, en vertu d’une licence distincte, le droit d’exploiter et d’améliorer le service de distribution canadien existant appelé Système de corrections GPS diffé-rentielles pan-canadien, ou CDGPS (exploité à l’heure actuelle par le Conseil cana-dien de géomatique).
2. Élaborer et exploiter un nouveau service de diffusion basé dans l’espace pour la distribution des données GPS•C.
3. Élaborer et exploiter un service fondé sur un protocole Internet utilisant une infras-tructure de téléphonie cellulaire sans fil.
À l’origine, le système CDGPS reposait sur 15 stations de poursuite, dont 14 étaient localisées au Canada. Depuis juin 2007, 14 nouvelles stations de l’IGS (International GNSS
Service) ont été intégrées au réseau CDGPS. L’augmentation du nombre de stations de
référence a permis d’étendre le territoire couvert par les corrections et d’améliorer la qualité ainsi que la disponibilité des corrections. D’une part, le satellite MSAT-1 doit être visible par l’utilisateur (figure 2.2), et d’autre part, les corrections diffusées doivent êtres dispo-nibles pour un maximum de satellites GPS observés. La figure 2.3 montre l’estimé moyen de la disponibilité des corrections pour tous les satellites visibles au-dessus d’un angle d’élévation de 10° (à partir de l’horizon) selon la position géographique de l’observateur. Considérant la position des levés terrain dans le cadre de cette recherche, les corrections GPS•C devraient être disponibles pour 100% des satellites observés par l’utilisateur (d’après la carte de la figure 2.3).
Figure 2.3 - Zone de couverture du CDGPS [CDGPS, 2007]
2.1.2 Corrections contenues dans le message GPS•C
Cette section a pour but de fournir de plus amples informations sur les corrections liées au message GPS•C. Premièrement, quelques détails supplémentaires sur le processus préalable aux calculs des dites corrections seront donnés. Ensuite, certains types de corrections à l’intérieur du message GPS•C, c’est-à-dire celles nécessaires aux travaux de cette re-cherche, soient les corrections d’orbites et d’horloges des satellites ainsi que la correction du délai ionosphérique, seront vues indépendamment.
La source des données pour le calcul des corrections est dérivée du réseau CACS. Les ACP (Active Control Point) enregistrent continuellement les mesures de phase et de code à une fréquence de 1 Hz pour tous les satellites GPS visibles. Chaque ACP dispose d’un récepteur géodésique GPS à double-fréquence de haute précision, équipés d’une horloge atomique externe [Lahaye et al., 2001]. De plus, sur certains sites, des données météorolo-giques, telles que la température, la pression et l’humidité y sont recueillies [Kassam et al., 2002], ceci afin de calculer des corrections les plus exactes et fidèles possibles.
Le document de référence [CDGPS ICD, 2003] présente le système GPS•C étant constitué des composantes suivantes:
1. Les points de contrôle actif en temps réel (RTACPs, Real-Time Active Control
Points), dont les fonctions sont : acquérir, valider, archiver localement et
trans-mettre les données.
2. Les stations maîtresses de contrôle actif en temps réel (RTMACSs, Real-Time
Mas-ter Active Control Stations) ont comme fonction d’agir comme réseau de contrôle,
c’est-à-dire : être responsable de la gestion des données, de la génération et de la transmission des corrections GPS•C.
3. Les stations de surveillance d’intégrité (IMSs, Integrity Monitoring Stations) ont, quant à elles, la fonction de procurer un contrôle de qualité indépendant pour l’intégrité du système GPS•C.
Les données provenant des RTACPs sont communiquées en temps réel aux RTMACSs en moins de deux secondes pour le traitement et l’archivage. Les stations RTMACSs calculent en temps réel les erreurs d’horloges des récepteurs et des satellites visibles en utilisant les corrections ultra-rapides prédites de l’IGS et les coordonnées fixes des RTACPs. Les corrections pour les éphémérides transmises (incluant les corrections d’orbites et d’horloges des satellites) et les délais ionosphériques verticaux (modèle ionosphérique à simple couche) sont alors générés. Les corrections d’orbites et d’horloges des satellites sont directement liées au message de navigation des satellites, ce qui signifie que ces dernières corrigent les informations transmises par les satellites GPS. Les corrections ionosphériques sont en revanche indépendantes du message de navigation. Ce qui permet aux utilisateurs observant la fréquence L1 seulement d’appliquer une correction pour le délai causé par l’ionosphère. La figure 2.5 présentée plus loin montre les relations entre les différents types de message.
Tel que vu précédemment, les corrections diffusées par le système CDGPS sont encodées sous plusieurs formats, mais celui qui nous intéresse plus particulièrement est le format GPS•C RTCA modifié (GPS•C MRTCA). Ce format inclut un message RTCA standard, ainsi qu’une partie non standard. Le tableau 2.1 dévoile des informations pour tous les types de messages sous ce format. On y retrouve certaines caractéristiques rattachées à
chacun des types de message telles que : le contenu, la résolution, la plage de données valide ainsi que l’intervalle de temps maximum de mise à jour.
Les types d’information contenus dans la partie non standard du message et ceux reliés au délai ionosphérique sont celles essentielles à extraire pour les fins de cette recherche. Plus spécifiquement, les corrections liées aux erreurs d’horloges et d’orbites des satellites ainsi que les corrections rattachées au délai ionosphérique. Chacune de ces corrections seront décrites en détail séparément dans les prochains paragraphes.
Tableau 2.1 - Types de messages GPS•C MRTCA [CDGPS ICD, 2003] Information Type Contenu Résolution Plage valide Intervalle
max. de mise-à-jour (s) Sta nd ard RT CA No n -Sta nd ard
Fast 2-5 1 PRN mask Correction 0.125m N/A 256 m N/A 60 2
Mixed Fast/Slow
24(0) Orbit offset Correction Clock offset 0.125m 0.125m 0.140m 256 m 32 m 71.48 m 2 24(1) Correction Orbit offset Clock offset Orbit rate Clock rate 0.125m 0.125m 0.140m 0.488mm/s 0.545mm/s 256 m 128 m 142.95 m 62.5 mm/s 69.8 mm/s Slow
25(0) Clock offset Orbit offset 0.125m 0.140m 32 m 71.48 m 120 25(1) Orbit offset Clock offset Orbit rate Clock rate 0.125m 0.140m 0.488mm/s 0.545mm/s 128 m 142.95 m 62.5 mm/s 69.8 mm/s Ionospheric Grid
18 Grid mask N/A N/A 300 26 Vert. delay 0.125m [ 0, 63.875 ]m 300 Time 12 GPS sec of week GPS week 1 week 1 sec [ 0, 604799 ] sec [ 0, 1023 ] week 300
No
n
-Sta
nd
ard
Nav Msg 28 1 subframe N/A N/A 7200 Fast (High-res) 32-35 Correction 0.0039m 64 m 2 Slow (High-res) 45 Orbit offset Clock offset Orbit rate 0.0039m 0.0039m 0.006mm/s 32 m 71.5 m 7.8 mm/s 120
Corrections ionosphériques
Les types de message 18 et 26 (voir tableau 2.1) correspondent à la correction du délai ionosphérique. Ces corrections possèdent une résolution de 12,5 centimètres et une mise à jour d’une fréquence minimale de 5 minutes (300 secondes). Les délais ionosphériques sont calculés sous forme de grille. Premièrement, les délais ionosphériques verticaux entre les récepteurs RTCAP et les satellites observés sont calculés à partir des mesures de phase L1 et L2 filtrées à l’aide des mesures de pseudodistance. Ces délais verticaux résultant servent à mettre à jour la grille ionosphérique basée sur le principe du modèle ionosphérique à simple couche (single layer ionosphere model). Cette méthode de modélisation ionosphé-rique, couramment utilisée, repose sur le principe que tous les électrons des différentes couches ionosphériques sont concentrés en une couche unique infinitésimale. Cette dernière est située à une certaine altitude que l’on fixe généralement entre 250 et 450 kilomètres. L’altitude choisie dans le cas présent est de 350 kilomètres. La figure 2.4 montre un extrait de la grille ionosphérique générée par le système CDGPS, tiré de [Rho et al., 2003]. Les petites croix sur la carte représentent les IGPs (Ionospheric Grid Point) servant à la modélisation de la simple couche ionosphérique. Il est à noter que la résolution spatiale de la grille n’est pas uniforme. Pour les latitudes inférieures à 55° Nord l’espacement entre les IGPs est de 5 en latitude et longitude. Par contre, pour les latitudes au Nord du 55ième parallèle la résolution diminue à 10° en latitude ainsi qu’en longitude.
Figure 2.4 - Grille ionosphérique générée par le système CDGPS [Rho et al., 2003] Afin de former la grille ionosphérique, les TECs (Total Electron Content), c’est-à-dire la densité d’électrons le long du trajet parcouru par l’onde, doivent être calculés.
Voici succinctement les étapes réalisées pour le calcul de la grille :
1. Tous les TECs en pente calculés, relatifs aux satellites observés au-dessus de l’angle du masque d’élévation par tout le réseau, sont projetés en TECs verticaux.
2. À l’aide de la moyenne mobile, les valeurs d’IPPs (Ionospheric Pierce Point) sont utilisées pour le calcul des valeurs des IGPs.
3. Suite à l’assimilation des valeurs d’IGPs, une surface à 18 coefficients est formée afin de rendre disponible l’interprétation d’une valeur en tout point sur la grille. Connaissant la valeur des délais verticaux à chacun des IGPs, il devient possible de calculer les délais ionosphériques des IPPs par rapport à un observateur. En même temps que la
correction ionosphérique, une valeur indicatrice de sa qualité est transmise à l’utilisateur. Cette qualité, appelée GIVEI (Grid Ionospheric Vertical Error Indicator), est numérotée de 0 à 15. Le tableau 2.2 montre la concordance de la valeur de la qualité du délai ionosphé-rique en mètres parallèlement au code GIVEI.
Tableau 2.2 - Correspondance des GIVEI à leurs valeurs en mètres [CDGPS ICD, 2003] GIVEI Qualité (mètres)
0 0.3 1 0.6 2 0.9 3 1.2 4 1.5 5 1.8 6 2.1 7 2.4 8 2.7 9 3.0 10 3.6 11 4.5 12 6.0 13 9.0 14 15.0 15 45.0 Corrections d’horloges
Les corrections d’horloges des satellites sont incluses dans ce format sous les types de message 32-35 et 45 (rapide et à long terme). Ces corrections confèrent une résolution d’environ 4 millimètres. Les corrections rapides sont rafraîchies à toutes les deux secondes, tandis que les corrections à long terme le sont à toutes les deux minutes (120 secondes). Le calcul des erreurs d’horloges s’effectue grâce aux mesures enregistrées à toutes les secondes par les récepteurs GPS de haute précision des stations de référence. C’est à l’aide des mesures de phase de l’onde porteuse, filtrées des mesures de pseudodistance et soustrait de l’effet ionosphérique, que les erreurs d’horloges des satellites et des récepteurs, reposant sur les stations de référence, sont déterminées. Une compensation par moindres carrés, utilisant les coordonnées précisément connues des stations, ainsi que les données les plus récentes des prédictions d’orbites, permet finalement la génération de ces corrections respectant une référence d’horloge virtuelle (VRC, Virtual Reference Clock). La VRC est
![Figure 1.3 - Erreurs des corrections d’orbites et d’horloges des satellites provenant du WAAS et du CDGPS [Rho et Langley, 2007]](https://thumb-eu.123doks.com/thumbv2/123doknet/5529824.132158/20.918.178.787.558.1015/figure-erreurs-corrections-orbites-horloges-satellites-provenant-langley.webp)