Fast Grasp Planning Using Cord Geometry
Texte intégral
Figure



Documents relatifs
Finally, SP-D seems to be a clinical biomarker for COPD, able to differentiate COPD patients among individuals consulting for respiratory diseases or symptoms
The plenary keynotes and papers cover the wide spectrum of the topics related to Natural fibres and materials, Mechanical performances of bio-based building materials and design
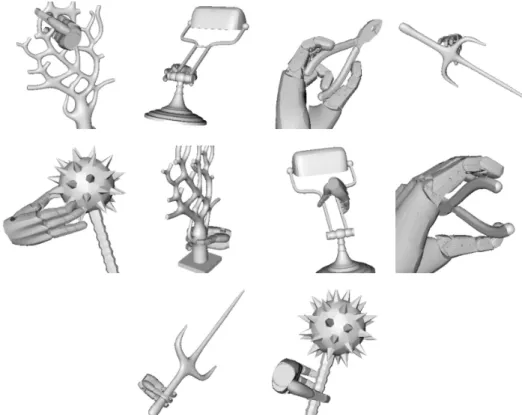
None of these works combine all the previously explained elements that are required for the implementation of a general and complete grasp planning pipeline for 3D deformable objects:
Percutaneous Treatment of Mitral Regurgitation With the PASCAL Device: A Full Grasp of the Pathology?. Guillaume Leurent, Vincent Auffret,
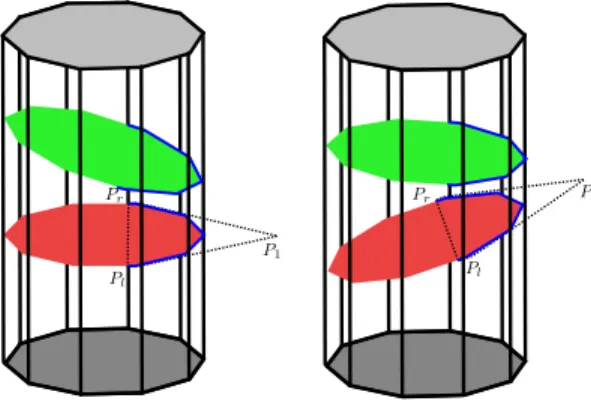
In particular, it is crucial to be able to know the fastest possible if a finger can not reach the object surface for a given grasp frame because we do not want to test all the
Nous avons proposé une heuristique constituée de trois phases : (1) la fixation de certaines variables par la résolution heuristique d’un problème de sac à dos avec contraintes
With generative methods, a DNN is trained to predict one (or multiple ordered) grasps from the sensor input. Predictions can be the direct regression of grasp parameters [6]
We show that amplitudes of the wrist acceleration peak (Experiment I), of the velocity and deceleration peaks (both experiments), and movement duration (Experiment I) were affected
