Existence of Nodal Solutions for Dirac Equations with Singular Nonlinearities
26
0
0
Texte intégral
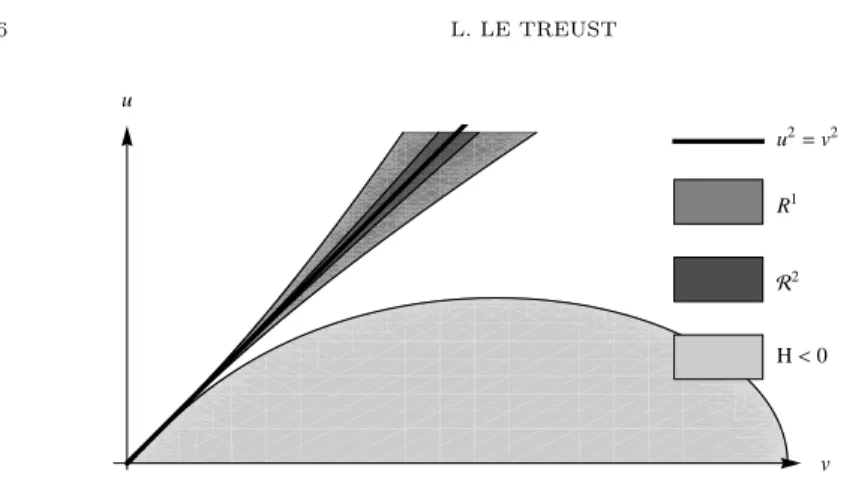
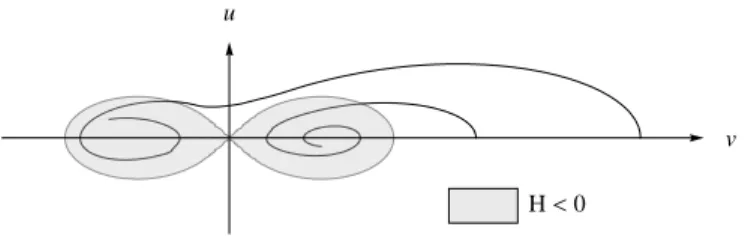
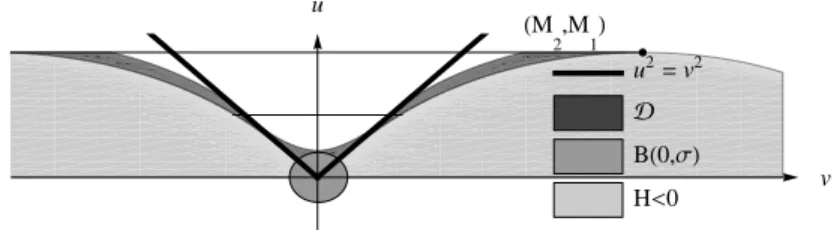
Figure

Documents relatifs
