Une plateforme d'orchestration de conteneurs Docker tolérante aux fautes byzantines
101
0
0
Texte intégral
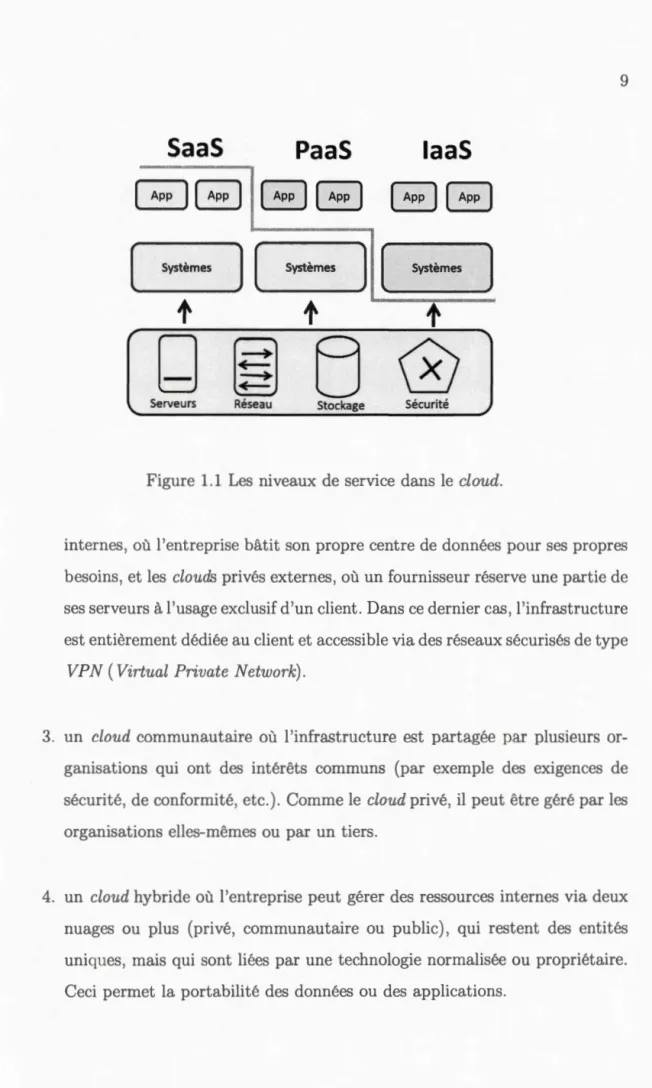
Figure


+7
Documents relatifs