© Chourouk Gharbi, 2020
Approches de modélisation de la planification forestière
tactique et d'intégration des feux de forêt
Thèse
Chourouk Gharbi
Doctorat en génie mécanique
Philosophiæ doctor (Ph. D.)
Approches de modélisation de la planification forestière tactique
et d’intégration des feux de forêt
Thèse
Chourouk Gharbi
Doctorat en génie mécanique, concentration génie industriel
Philosophiæ doctor (Ph. D.)
Sous la direction de :
Daniel Beaudoin, directeur de recherche
Mikael Rönnqvist, codirecteur de recherche
ii
Résumé
La planification forestière est un exercice ardu qui demande des efforts humains et matériels très importants. Plusieurs modèles de planification forestière sont proposés dans la littérature. Cependant, ils sont généralement difficiles à implémenter. En outre, leur performance est limitée aux forêts de petite taille ou de taille moyenne. L’objectif général de cette thèse est de proposer des outils simples et efficients qui permettent de réduire la complexité de cet exercice en utilisant la modélisation mathématique.
Les modèles proposés dans cette thèse traitent le problème de planification forestière sur un horizon tactique et considèrent principalement deux restrictions spatiales qui sont des restrictions d’adjacence ou de période de régénération et des restrictions de rendement soutenu de récolte.
Dans la première partie, nous avons proposé une nouvelle formulation mathématique basée sur la programmation en nombres entiers qui permet de modéliser le problème de planification tactique sous des contraintes spatiales. Nous avons eu recours à une méthode de résolution exacte à l’aide d’un solveur commercial pour résoudre le problème. Nous avons utilisé plusieurs forêts réelles de tailles différentes dont trois sont de très grandes forêts dans la région de la Mauricie au Québec. Pour évaluer la performance de notre modèle proposé, nous avons utilisé deux autres formulations mathématiques qui sont déjà proposées dans la littérature pour résoudre le même problème sous les mêmes contraintes. Les résultats ont montré que notre formulation est plus simple d’un point de vue de la modélisation et de l’implémentation. En ce qui concerne la résolution, les résultats ont montré qu’il n’y pas une formulation qui avait une performance supérieure lorsque la taille des forêts est petite ou moyenne. Cependant, lorsque la taille des forêts devient large, notre formulation avait une performance supérieure.
Dans la deuxième partie de la thèse, nous avons proposé deux méthodes pour résoudre le même problème en utilisant les grandes forêts. La première méthode est une heuristique basée sur la relaxation linéaire. Pour évaluer sa performance, nous avons comparé les résultats qu’elle a fournis avec ceux obtenus en utilisant un solveur commercial pendant une durée de résolution prédéfinie. Les résultats ont montré que le solveur est plus performant lorsque le problème est mono-période. Cependant, lorsque le problème est multi-période, contrairement à notre heuristique, le solveur n’était pas capable d’obtenir un résultat pendant le temps de résolution fixé. La deuxième méthode consiste à contrôler la taille des problèmes à résoudre à travers un indicateur qui contrôle la forme des regroupements de peuplements à couper. En plus de sa simplicité, cette méthode permet de réduire significativement la taille des problèmes et d’avoir une planification opérationnelle plus efficiente par l’élimination des regroupements de peuplement ayants des formes non désirables.
iii
Dans la troisième partie, nous avons proposé un modèle intégré stochastique bi-niveau qui permet la planification de la coupe tout en considérant les feux de forêts. La formulation mathématique proposée dans la première partie de la thèse représente le premier niveau. Le deuxième niveau est un modèle de propagation de feux. Il considère des points d’ignition du feu, des points critiques tels que des municipalités et des croisements de routes forestières et deux scénarios de différentes directions et vitesses de vent. L’intégration est possible à travers la reformulation primal-dual des conditions d’optimalités du problème du plus court chemin entre les points d’ignition et les points critiques. Nous avons utilisé des forêts hypothétiques pour les expérimentations. Les résultats ont montré que les regroupements de peuplements planifiés sont localisés dans des zones qui permettent de retarder la propagation du feu des points d’ignition vers les points critiques.
iv
Abstract
Forest planning is a difficult task that needs important human and material efforts. Many forest planning models are proposed in the literature. However, their implementation is usually complex. Moreover, their performance is limited to small and medium forests. The whole objective of this thesis is to propose simple and efficient tools to reduce the complexity of the forest planning using mathematical modeling.
In this thesis, proposed models are applied for tactical forest planning and consider mainly two spatial restrictions that are adjacency or green-up restrictions and sustainable timber yields restrictions.
In the first part, we proposed a new mathematical formulation based on integer programming to model the tactical forest planning under spatial restrictions. We solved the model with an exact method using a commercial solver. We used many real forests with different sizes. Three of them are very large forests and are located in the Mauricie region of Quebec. We evaluated the performance of the proposed model using two other formulations existing in the literature to model the same problem under the same restrictions. Results showed that there is no formulation that outperformed others when small and medium forests are used. However, the proposed formulation outperformed others when large forests are used.
In the second part, we proposed two heuristic approaches to solve the same problem using large forests. The first one is a linear relaxation heuristic. We compared results obtained with the heuristic with those obtained with a commercial solver when a computational time is predefined. Results showed that the solver is more performant when mono-periods problems were solved. However, when multi-periods problems were solved, unlike our heuristic, the solver does not find any feasible solution within the fixed computational time. The second heuristic is a size reduction heuristic which uses a shape index to control the shape of the clusters of stands. Besides its simplicity, this method is very beneficial as it reduces significantly problems size and anticipate the operational planning by eliminating non-profitable clusters.
In the third part, we proposed a stochastic programming model formulated as an integrated mixed integer programming model for scheduling harvesting operations, which directly takes into account a fire spread model. It is a bi-level model. In the first level, we used the tactical forest planning model proposed in the first part. The second level represents the fire spread model that considers fire spread between ignition points and critical points, which could be, for example, municipalities and important road crossings. It considers multiple scenarios, which takes into account wind direction, and wind spread. The integration is possible due to a reformulation of a bi-level optimization problem where the lower level shortest path representation is written explicitly with a primal-dual reformulation of its optimality conditions. Results based on a set of illustrative instances are presented. Results vary depending on spatial restrictions considered in the model. However, harvesting
v
scheduled are usually allocated to delay fires reaching critical points and tends to allocate harvesting operations around critical points.
vi
Table des matières
Résumé ... ii
Abstract ... iv
Table des matières ... vi
Liste des figures ... viii
Liste des tableaux ... ix
Remerciements ... xii Avant-propos ... xiii Introduction générale ... 1 1.1 Introduction ... 1 1.2 Revue de littérature ... 2 1.2.1 Préalable ... 2
1.2.2 L’aménagement forestier spatial ... 3
1.2.3 La planification de la coupe de bois ... 4
1.2.4 L’adjacence dans les problèmes de planification de la coupe ... 4
1.2.5 La gestion des feux de forêts. ... 5
1.3 Objectifs et structure de thèse ... 5
1.4 Conclusion ... 10
Chapitre 2 Méthodes exactes pour la résolution du problème de planification forestière spatiale ... 11
2.1 Résumé ... 11
2.2 Abstract ... 11
2.3 Introduction ... 12
2.4 Existing models ... 14
2.4.1 Notations ... 14
2.4.2 The path formulation ... 17
2.4.3 The MCC formulation ... 18
2.5 Proposed model (Full adjacent unit formulation) ... 18
2.5.1 Full adjacent unit constraint formulation in URM approach. ... 18
2.5.2 Full adjacent unit constraint formulation in ARM approach ... 19
2.5.3 The full adjacent unit formulation ... 20
2.5.4 Strengthening formulation ... 21
2.6 Case studies and experiments ... 22
2.6.1 Settings ... 22
2.6.2 Implementation and cluster generation ... 23
2.6.3 Problem size comparison ... 26
vii
2.7 Concluding remarks ... 37
Chapitre 3 Méthodes heuristiques pour la résolution des problèmes de planification forestière larges avec des contraintes d’adjacence ... 40 3.1 Résumé ... 40 3.2 Abstract ... 40 3.3 Introduction ... 41 3.4 Solution approaches ... 44 3.4.1 Model formulation ... 44 3.4.2 Heuristic methods ... 46
3.5 Experiments and Results ... 50
3.5.1 Experiments ... 50
3.5.2 Results using FRH_ILPH ... 52
3.5.3 Results using the Size Reduction heuristic ... 56
3.6 Concluding remarks ... 61
Chapitre 4 Intégration des opérations forestières et de la propagation du feu dans un modèle stochastique . 63 4.1 Résumé ... 63
4.2 Abstract ... 63
4.3 Introduction ... 65
4.4 Problem description ... 67
4.5 Case study and results ... 76
4.5.1 Instances ... 76
4.5.2 Results ... 78
4.6 Concluding remarks ... 86
Conclusion générale et perspectives ... 87
5.1 Conclusion générale ... 87
5.1.1 Contribution1 ... 87
5.1.2 Contribution 2 ... 88
5.1.3 Contribution 3 ... 88
5.2 Perspectives ... 89
5.2.1 La recherche opérationnelle et l’optimisation dans l’aménagement forestier ... 89
5.2.2 La transformation des processus d’affaires... 90
5.2.3 L’application et l’implantation des nouvelles technologies dans les chaines de création de valeur 92 Bibliographie ... 94
Annexe A Path formulation ... 101
Annexe B Maximal Clique-Cluster formulation ... 102
viii
Liste des figures
Figure 1.1 : Contributions et structure de la thèse ... 7
Figure 1.2: Éléments de recherche du premier article ... 8
Figure 1.3: Éléments de recherche du deuxième article ... 9
Figure 1.4: Éléments de recherche du troisième article ... 10
Figure 2.1 : Hypothetical forest example with 11 units ... 16
Figure 2.2: Number of constraints generated with the FAU and the MCC models in real cases ... 28
Figure 2.3: Number of constraints generated with the FAU and the MCC models with square forest ... 29
Figure 3.1: Pseudo-code of the iterative linear programming-based heuristic ... 48
Figure 3.2: Hypothetical forest ... 49
Figure 3.3: Algorithm of the implemented method using the shape index ... 50
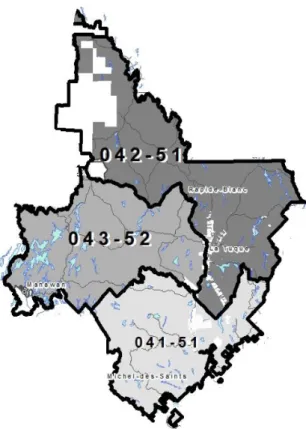
Figure 3.4: Management units in Quebec used for experimentations ... 51
Figure 4.1: Illustration of a landscape with 8 units ... 67
Figure 4.2: Illustration of a general network and 8 arcs going out from one node ... 68
Figure 4.3: Illustration of network nodes with stands ... 69
Figure 4.4: Illustration of arcs covered by a cell ... 70
Figure 4.5: Arcs between two nodes in each scenario ... 70
Figure 4.6: Structure of the used cases ... 76
Figure 4.7: Illustration of network with northwest spread fire direction (a) and eight spread fire directions (b) . 78 Figure 4.8: Proposed solutions with different tmax and considering sustainable yield constraints for case 1 . 82 Figure 4.9: Proposed solutions with different tmax and considering sustainable yield constraints for case 2 .. 83 Figure 4.10: Proposed solutions with different tmax and considering sustainable yield constraints for case 3 83 Figure 4.11: Proposed solutions with different tmax and considering sustainable yield constraints for case 4 84 Figure 4.12: Proposed solutions with different tmax and considering sustainable yield constraints for case 5 85 Figure 4.13: Proposed solutions with different tmax and considering sustainable yield constraints for case 6 86
ix
Liste des tableaux
Table 2.1: Spatial requirements (constraints) considered for mathematical formulations ... 17
Table 2.2: Characteristics of real forests ... 24
Table 2.3: CPU to generate maximal clique for large cases ... 25
Table 2.4: Different values of clusters in different work ... 26
Table 2.5 : Size of the different formulations when T=3 ... 27
Table 2.6: Constraints number generated with the FAU and the MCC formulation with square forests ... 29
Table 2.7: Impact of the maximal allowable cut on the formulations size when T=3 ... 30
Table 2.8: Different problem variants ... 31
Table 2.9: Integer problem resolution for small cases ... 33
Table 2.10: Integer problem resolution with URM-based approaches ... 35
Table 2.11: Integer problem resolution with ARM-based approaches ... 36
Table 2.12: Total time to solve mono-period URM problem ... 37
Table 3.1: Example of feasible clusters and their shape index ... 49
Table 3.2: Forests information ... 51
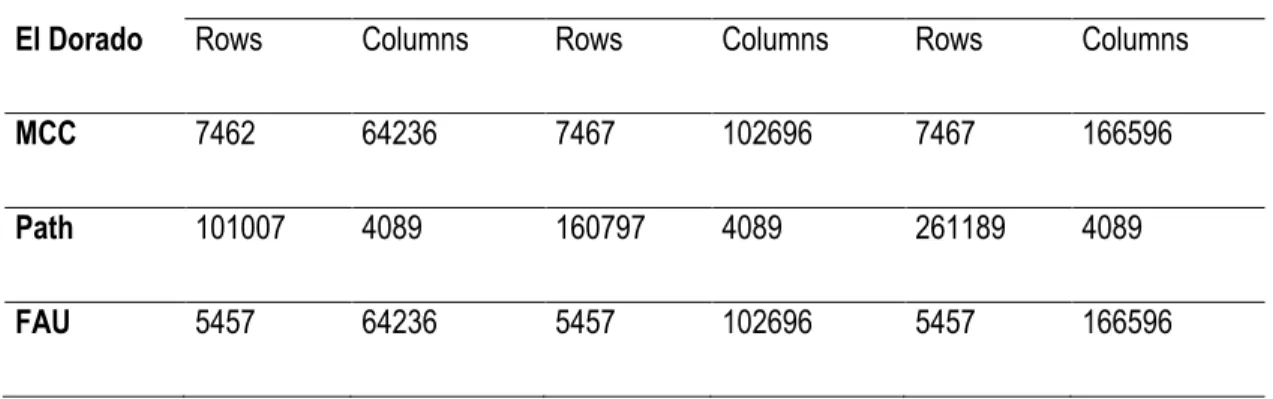
Table 3.3: Size of the FAU formulation using 3 time periods ... 52
Table 3.4: THR and optimality gap on El Dorado case with the FRH_ILH ... 53
Table 3.5: THR and optimality gap on 04151 case with the FRH_ILH ... 54
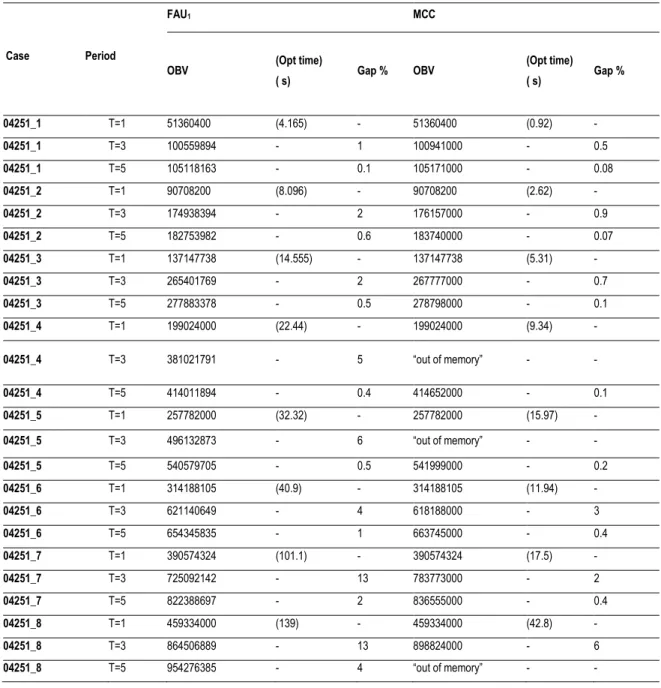
Table 3.6: THR and optimality gap on 04251 case with the FRH_ILH ... 54
Table 3.7: THR and optimality gap on 04352 case with the FRH_ILH ... 55
Table 3.8: Comparison of the number of feasible clusters for different shape index thresholds ... 56
Table 3.9: THR, gap and computational time using the shape index values for the management unit 04151 .. 57
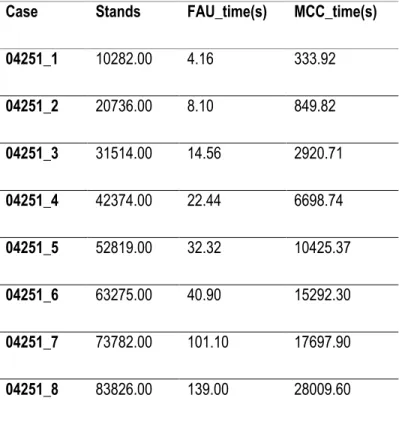
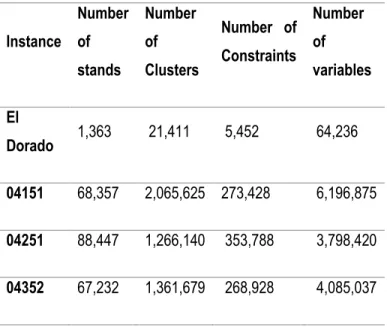
Table 3.10: THR, gap and computational time using the shape index values for the management unit 04251 58 Table 3.11: THR, gap and computational time using the shape index values for the management unit 04352 59 Table 4.1: Size, number of ignition points, ignition points, number of ending points and ending points for each case 77 Table 4.2: Number of scheduled harvesting and computational time depending on time limit for each case where no sustainable yield and adjacency are considered or only adjacency restrictions are considered ... 80
x
À la mémoire de mes grands-parents Ali et Habiba
À mes parents Abdelkrim et Ahlem
À mes sœurettes Yosr et Rim
À mon âme sœur Amine
À mon petit prince Zakaria
xi
La patience est amère mais son fruit est doux
(Jean-Jacques Rousseau)
xii
Remerciements
Avant toute chose, je tiens à exprimer ma gratitude envers mon directeur de recherche Prof. Daniel Beaudoin pour son soutien et ses encouragements durant ce long parcours. Il a été toujours à l’écoute et prêt à me donner conseil non seulement pour le bien du projet mais aussi pour mon bien dans la vie en général.
Je suis énormément reconnaissante à mon co-directeur Prof Michael Rönnqvist. C’est grâce à son expertise particulière en matière de recherche opérationnelle qu’on a pu mener ce projet à bien. Je le remercie pour nos discussions stimulantes et enrichissantes. Je le remercie de m’avoir enseignée son savoir et son savoir-faire. Je le remercie de m’avoir transmise sa passion pour la recherche opérationnelle.
Je remercie, également, Prof. Marc-André Carle pour son implication et ses retours rapides. Grâce à ses connaissances dans le domaine forestier et dans le domaine de la recherche opérationnelle, ses conseils précieux n’ont pu qu’améliorer la qualité de ce travail.
J’aimerais aussi remercier Alexandre Morneau pour sa disponibilité et son aide.
Mes remerciements vont également à mes anciennes collègues et mes éternelles copines Maha et Foroogh pour nos discussions drôles parfois et tristes parfois, pour votre soutien et pour vos encouragements.
Un grand merci à toute ma famille de m’avoir supportée et encouragée dans ce parcours, à mes parents Abdelkarim et Ahlem mes beaux-parents Hedi et Najwa, à mes sœurs Yosr et Rim et mes belles sœurs Ines, Manel et Neila et à ma belle grand-maman Zineb.
Ce travail n’aurait jamais pu voir le jour sans mon cher Amine, qui m’a encouragée à poursuivre ce programme de doctorat. Je le remercie pour son support et sa patience incomparable. Finalement, je remercie mon fils qui a grandi avec ce projet de doctorat.
xiii
Avant-propos
Ce projet, intitulé " Approches de modélisation de la planification forestière tactique et d’intégration des feux de forêt ", est réalisé dans le but d’obtenir le grade de Doctorat en Génie Mécanique, concentration génie industriel (Ph.D.) de l’Université Laval. Il a été effectué, sous la direction du Prof. Daniel Beaudoin et sous la codirection de Prof. Mikael Rönnqvist.
Cette thèse est rédigée selon le principe d’insertion d’articles. Elle se compose de trois articles qui ont été coécrits avec Prof. Daniel Beaudoin, Prof. Mikael Rönnqvist et Prof. Marc-André Carle. Pour chacun des articles présentés, j’ai agi à titre de chercheuse principale dans l’identification de la problématique, la conception et l’implantation des différents modèles d’optimisation, la réalisation des expériences, l’analyse des résultats, la rédaction du manuscrit, ainsi que la révision des versions soumises aux journaux et aux conférences.
Le premier article, intitulé " A new mixed-integer programming model for spatial forest planning ", a pour auteurs Chourouk Gharbi, Mikael Rönnqvist, Daniel Beaudoin et Marc-André Carle. Il est publié dans le journal « Canadian Journal of Forest Research », Volume 49, Octobre 2019, Page 1493-1503. La version présentée dans cette thèse est identique à la version publiée.
Le deuxième article, intitulé "Heuristic methods for large spatial forest planning problem with adjacency constraints", a pour auteurs Chourouk Gharbi, Daniel Beaudoin, Marc-André Carle et Mikael Rönnqvist. Il a été soumis dans le journal " Scandinavian Journal of Forest Research", en novembre 2019.
Le troisième article, intitulé " Integration of harvest operations and fire spread in a stochastic programming model", a pour auteurs Chourouk Gharbi, Mikael Rönnqvist, et Daniel Beaudoin. Il est en cours de finalisation pour soumission.
1
Introduction générale
1.1 Introduction
Par définition, une chaine de valeur est un ensemble d’activités logistiques et commerciales qui permettent de fournir un produit fini à une clientèle (Porter, 1982). Dans le contexte forestier, la chaine de valeur est un enchainement d’activités s’étalant de l’aménagement forestier jusqu’à la distribution des produits de bois aux clients finaux (D’Amours, Frayret, Gaudreault, LeBel, & Martel, 2009). Cette, chaîne commence, ainsi, par l’aménagement de la forêt et les opérations forestières qui y sont associées. Ce dernier comprend plusieurs étapes qui vont de l’analyse du territoire jusqu’à la réalisation des bilans en passant, entre autres, par l’élaboration de la stratégie de l’aménagement forestier, la détermination des possibilités forestières et l’élaboration des plans de récolte (Bureau du forestier en chef, 2013). Les objets de décision dans la planification forestière sont souvent les peuplements. Un peuplement peut être défini comme étant un regroupement d’arbres localisés sur une zone contiguë et qui sont assez similaires (composition floristique, structure, âge, etc) pour pouvoir subir le même traitement simultanément (Korosuo, 2013). Les périodes de coupes ainsi que le type de traitement sont définis dépendamment des caractéristiques des peuplements tels que l’âge et la taille des arbres.
Depuis les deux dernières décennies, l’intérêt des aspects sociaux, environnementaux et économiques, soit le développement durable, est devenu de plus en plus important. Plusieurs restrictions sont aujourd’hui imposées pour inclure ces aspects dans l’aménagement forestier. On parle ainsi de l’aménagement durable des forêts. À cet effet, plusieurs pays tels que les États-Unis, le Canada, le Suède, l’Australie et le Royaume-Uni établissent des réglementations qui permettent de respecter un aménagement durable des forêts (Shan, Bettinger, Cieszewski, & Li, 2009). L’objectif est de respecter les besoins de la génération courante sans altérer les ressources pour les futures générations. Des approches systémiques sont toujours appliquées dans l’aménagement forestier. Selon le Gouvernement du Québec, (2013a), l’aménagement forestier écosystémique est défini « comme un aménagement qui vise à réduire les écarts entre la forêt aménagée et la forêt naturelle en vue d’assurer le maintien de la biodiversité et de la viabilité des écosystèmes». Ceci étant non réalisable sans considérer et suivre les dimensions spatiales de la forêt. Des systèmes d’information géographiques sont utilisés pour ce faire (Baskent & Keles, 2005). Ainsi, un aménagement forestier est spatial s’il considère des données géographiques ou s’il est associé à une localisation spécifique (Aranoff, 1991). Plusieurs aspects spatiaux ont été considérés dans les problèmes d’aménagement forestier tels que l’adjacence. Parmi les restrictions d’adjacence les plus étudiées se trouvent le délai de régénération (green-up), la taille d’ouverture, la connectivité et la conservation de l’habit de la faune (Baskent & Keles, 2005).
2
Depuis plusieurs années, les chercheurs travaillent sur le développement des modèles de planification de l’aménagement forestier spatial. Plusieurs méthodologies qui utilisent la recherche opérationnelle, soient l’optimisation, la simulation et les heuristiques, sont proposées pour traiter plusieurs forêts avec différents objectifs spatiaux. La performance de ces méthodologies est toujours une préoccupation de ces chercheurs, particulièrement lorsque la taille des forêts traitées est grande. Cette thèse s’inscrit dans cette thématique de recherche et a comme objectif de développer et d’évaluer la performance des nouvelles méthodologies recourant à la recherche opérationnelle afin de traiter différents problèmes d’aménagement forestier tout en considérant des restrictions spatiales.
Dans ce qui suit, nous présenterons, en premier lieu, une brève revue de littérature liée au sujet de recherche. En deuxième lieu, nous détaillerons la problématique et les objectifs de recherche. Nous décrirons par la suite la méthodologie utilisée dans les différentes contributions de la thèse, ainsi que la structure de la thèse.
1.2 Revue de littérature
1.2.1 Préalable
Le paysage forestier est une mosaïque d’unités spatiales. La structure spatiale de la forêt est représentée par l’aménagement relatif de ces unités et l’interconnexion entre elles (Baskent & Keles, 2005). La planification forestière spatiale est une approche de modélisation qui intègre des besoins spatiaux ainsi que des objectifs d’aménagement généralement conflictuels. La taille des blocs de récolte, la forme, la connectivité et l’adjacence sont quelques exemples des besoins spatiaux. L’approvisionnement en matière ligneuse et la gestion des feux de forêt sont parmi les principaux objectifs d’aménagement.
La réalisation de la planification est un processus de prise de décision hiérarchique (Murray & Church, 1995). Il s’étale souvent sur trois niveaux, soit: stratégique, tactique et opérationnel. Typiquement, au niveau stratégique, les peuplements homogènes (espèces, âge, qualité) sont regroupés (Rönnqvist et al., 2015). Ces peuplements ne sont pas connectés spatialement. La notion spatiale à ce niveau n’est pas nécessaire car les objectifs sont généraux et consistent surtout à rencontrer des cibles et des indicateurs définis au niveau de la stratégie d’aménagement à long terme (Gouvernement du Québec, 2013b). Au niveau tactique, la considération des aspects spatiaux devient très importante car à ce niveau le séquencement spatial de la récolte ainsi que la planification des routes sont définis sur un moyen horizon. La gestion des feux de forêt est aussi considéré à ce niveau du moment où les localisations géographiques sont considérées. La planification au niveau opérationnel a pour but de déterminer les plans de récolte qui permettent de satisfaire la demande en matière ligneuse à court terme. Il est aussi important à ce niveau d’avoir le portrait spatial de la forêt car cette planification considère des zones délimitées au sein d’une forêt et non la forêt au complet (Rönnqvist et al., 2015). Le volet tactique représente le lien entre le volet stratégique et le volet opérationnel et permet de combler l’écart entre les deux
3
volets (Church, Murray, & Barber, 2000). En effet, les modèles stratégiques permettent d’analyser les activités forestières avec une agrégation spatiale sur un long horizon de planification alors que les modèles opérationnels fournissent un ensemble de solutions spatialisées sur un horizon de planification court (Church, 2007). Ainsi, les modèles tactiques permettent, entre autres, de lier les modèles stratégiques et opérationnels par :
La projection des décisions prises au niveau stratégique en passant des peuplements agrégés sans considération spatiale vers des zones de planification interconnectées spatialement.
La considération des objectifs d’aménagement qui ne peuvent pas être considérés au niveau stratégique tels les objectifs de l’aménagement écosystémique reposant sur des aspects spatiaux. Dans le processus de la planification forestière, l’impact des feux forestiers sur la disponibilité de la matière ligneuse est pris en compte dans le calcul de la possibilité forestière en amont et à postériori des incendies. Cependant, l’information sur la localisation spatiale de ces incidents ne peut pas être connue en amont de l’incendie. Ceci fait partie des différents facteurs qui peuvent causer de l’incohérence entre la valeur générée par les plans et la valeur générées par la coupe en matière de bois récolté. L’impact des feux n’est pas limité seulement à la disponibilité de la matière ligneuse. Les feux peuvent aussi affecter plusieurs commodités situées au sein ou à proximité des milieux forestiers telles que les intersections routières dans la forêt et les villages aux alentours.
1.2.2
L’aménagement forestier spatial
La mise en œuvre de l’aménagement forestier spatial a été introduit depuis le début des années 1990 lorsque plusieurs chercheurs tels que Jamnick & Walters (1992) et Baskent & Jordan (1991) ont commencé à utiliser les systèmes d’information géographiques (GIS) dans leurs recherches. Le but était de se servir de ces systèmes pour déterminer les prescriptions au niveau des peuplements (Baskent & Keles, 2005). Plusieurs autres aspects spatiaux ont été ensuite considérés d’où la multitude et la diversité des problèmes d’aménagement forestier. Parmi eux, figurent les problèmes concernant la forme et la répartition des blocs de récolte, les problèmes d’adjacence ou de délais de régénération (croissance), les problèmes de taille maximale et minimale de coupe, les problèmes de connectivité et de fragmentation et les problèmes de gestion des feux forestiers. Certes ces problèmes ont émergé à cause des préoccupations environnementales. Cependant, ils ont aussi permis aux usagers du milieu forestier d’encadrer l’ensemble des activités telles que l’exploitation de la matière ligneuse, la chasse et la pêche. Par exemple, connaître les emplacements géographiques des blocs de récolte pour l’industrie forestière, leur permet une meilleure information sur la qualité et la quantité du bois généré par période, d’où une planification de l’approvisionnement plus efficace.
4
Dans ce qui suit, la revue de littérature cible principalement les aspects spatiaux de l’aménagement forestier traités dans nos trois contributions : soit l’adjacence et la gestion du feu.
1.2.3 La planification de la coupe de bois
La planification forestière s’intègre dans les éléments de la planification de l’aménagement forestier. La localisation spatiale de la planification de la coupe se détermine surtout aux niveaux tactique et opérationnel (Baskent & Keles, 2005; Church et al., 2000; Kangas, Nurmi, & Rasinmäki, 2014). Elle consiste à sélectionner les blocs de récolte en suivant une hiérarchie. Les blocs qui font l’objet de récolte sur une période qui varie de 5 à 20 ans sont d’abord sélectionnés (Andersson & Eriksson, 2007). À partir de cette première sélection, des secteurs d’intervention potentiels qui font l’objet d’une planification opérationnelle sont choisis pour assurer la récolte dans un avenir de trois ans. Enfin, des secteurs d’intervention sont délimités pour satisfaire les besoins annuels des industries forestières (Gharbi, Lebel, & Beaudoin, 2014).
1.2.4
L’adjacence dans les problèmes de planification de la coupe
Les contraintes d’adjacence dans les problèmes d’aménagement forestier empêchent la coupe simultanée des zones de récolte qui partagent une frontière commune ou qui sont séparées par une certaine distance. On parle de contraintes de régénération lorsque la coupe simultanée est interdite pendant une période de temps (Murray, 1999). Il est très important de considérer ce type de contraintes dans les problèmes de planification forestière pour la protection des espèces et de l’écosystème. Selon Borges & Hoganson (2000), il permet de réduire l’écart entre une forêt naturelle et une forêt exploitée en maintenant l’hétérogénéité spatiale des peuplements. L’adjacence est difficile à modéliser et à analyser. Elle est souvent liée à la taille maximale de coupe. Dans la littérature, deux approches de modélisation sont proposées (Murray, 1999). La première est connue sous le nom de l’approche URM (Unit Restriction Model). Les blocs de récolte sont prédéfinis et ayant comme taille moyenne la limite de coupe spécifiée. Empêcher la coupe simultanée de deux blocs de récolte adjacents assure que la taille de coupe n’excède jamais la taille maximale de coupe. La deuxième est connue sous le nom de l’approche ARM (Area Restriction Model). Dans cette approche, les blocs de récolte ne sont pas prédéfinis. Ils sont construits à partir des blocs unitaires dont la taille est généralement beaucoup plus petite que la taille maximale de coupe. La contrainte d’adjacence dans ce cas permet de couper plusieurs blocs adjacents tant que leur taille totale n’excède pas la taille maximale de coupe (Murray, 1999). Plusieurs chercheurs ont étudié des façons différentes de modéliser l’adjacence. Mentionnons entre autres (Goycoolea, Murray, Vielma, & Weintraub, 2009; Marc E. McDill & Braze, 2000; Murray, 1999; Yoshimoto & Brodie, 1994). Les méthodes basées sur l’approche ARM sont toujours plus difficiles à modéliser et à résoudre (Baskent & Keles, 2005). Cependant, elles permettent de générer des plans d’aménagement plus flexibles et qui génère une meilleure valeur (Kašpar, Marušák, & Bettinger, 2016).
5
1.2.5 La gestion des feux de forêts.
Le feu de forêt est un phénomène naturel qui a ses bénéfices dans le maintien de l’écosystème. Par contre, il présente plusieurs risques tels que les blessures, les dommages sociaux et économiques, des pertes de matière ligneuse par la réduction de la quantité de la matière disponible et l’augmentation des coûts, etc (Martell, 1994). La gestion des feux au Canada se base essentiellement sur la prévention, la détection et la suppression des incendies. Rares sont les traitements de la matière ligneuse qui sont planifiés pour réduire les risques des incendies et leurs propagations (Acuna, Palma, Cui, Martell, & Weintraub, 2010). Les stratégies de gestion des feux de forêts considèrent souvent des priorités autre que la production de la matière ligneuse alors que les industries forestières cherchent toujours des moyens pour protéger les zones de production contre les incendies (Acuna et al., 2010). Au début des années 2000, les chercheurs du domaine forestier ont commencé à travailler sur des méthodes intégrées pour aménager la forêt et le feu. Hirsch et al. (2001) décrivent ces méthodes comme étant l’ensemble des pratiques proactives qui permettent de réduire les pertes causées par le feu ainsi que les risques associés aux feux prescrits. Les traitements sylvicoles, entre autres, la récolte du bois, sont considérés parmi ces pratiques qui permettent de réduire l’impact du feu (Gustafson, Zollner, Sturtevant, He, & Mladenoff, 2004; Johnson, 1998). Wei (2012) pense que la planification des traitements sylvicoles doit être faite en amont du déclenchement du feu. La fragmentation des forêts qui en résulte permet de créer des zones tampons et de changer la mosaïque de la forêt ce qui réduit la propagation du feu (Acuna et al., 2010). La modélisation de ces méthodes intégrées présente toujours des défis. Selon Martell et al. (2004), en plus du caractère spatial du problème, la modélisation de l’occurrence du feu ainsi que sa propagation stochastique présentent des difficultés mathématiques très importantes. Les approches utilisées sont souvent itératives et consistent à modéliser le comportement des feux de forêt et à utiliser le modèle comme intrant dans le modèle de l’aménagement forestier.
1.3 Objectifs et structure de thèse
Il existe un écart entre ce que les modèles de planification de l’aménagement forestier au niveau tactique devraient considérer en théorie et ce que ces modèles considèrent dans la pratique. Les objectifs de l’aménagement forestier sont multiples. Les projeter en intégrant la spatialisation à travers un modèle de planification tactique qui traite des grandes forêts nécessite des modèles performants.
L’adjacence est l’une des principales restrictions spatiales étudiées dans la littérature et est considérée dans plusieurs méthodes. Cependant, elles sont complexes à modéliser. Plusieurs méthodes nécessitent un effort algorithmique important. D’autres consomment un énorme temps de résolution. Les cas d’étude utilisés pour tester les méthodes proposées et évaluer leurs performances sont, généralement, de petites tailles ou de tailles moyennes. Dans la vie pratique, et surtout dans le contexte Québécois, la taille des forêts est beaucoup plus grande. Par ailleurs, les modèles de planification tactique ne considèrent pas les feux forestiers malgré leurs
6
impacts sur le résultat de la planification et sur le milieu forestier en général. Le problème de planification forestière et les problèmes de gestion des feux de forêts sont souvent traités séparément. La plupart des travaux qui ont intégré les deux problèmes sont basés sur une approche itérative. À notre connaissance, et d’après la revue de littérature sur l’aménagement forestier et la gestion des feux de forêts, rares sont les travaux qui ont intégré la planification forestière spatiale avec l’aménagement forestier.
L’objectif général de ce travail est de proposer des méthodes qui sont à la fois simple et efficiente pour modéliser et résoudre le problème de planification forestière sur un l’horizon tactique et à une large échelle en tenant compte des restrictions spatiales et des risques associés aux feux de forêts.
Plus spécifiquement, la thèse présente trois objectifs spécifiques :
Objectif 1 : Proposer un modèle simple et efficace qui permet de modéliser le problème de la planification
forestière en considérant des contraintes spatiales.
Objectif 2 : Proposer des heuristiques pour le modèle proposé lors de la résolution de problème de grandes
tailles.
Objectif 3 : Proposer une méthode intégrée pour modéliser et résoudre le problème de gestion des feux de
forêts et le problème de planification forestière.
Pour atteindre les objectifs définis, trois contributions sont proposées dans le chapitre 2, le chapitre 3, et le chapitre 4 (Figure 1.1). Le dernier chapitre est dédié à la conclusion générale et présente quelques pistes de recherche futures.
7
Figure 1.1 : Contributions et structure de la thèse
Les contributions sont structurées dans ce rapport sous forme de trois chapitres tel que suit :
Le chapitre 2 présente le premier article de cette thèse intitulé « Méthodes exactes pour la résolution du problème de planification forestière spatiale » (voir Figure 1.2). L’objectif est de proposer un nouveau modèle d’optimisation qui permet de résoudre efficacement le problème de planification forestière spatiale. Les restrictions considérées sont des restrictions d’adjacence, des restrictions qui empêchent la récolte d’une zone plus qu’une fois durant l’horizon de planification, des contraintes qui forcent un rendement soutenu de récolte durant les différentes périodes et une restriction qui force à avoir un âge moyen de peuplements à la fin de l’horizon de planification. Le modèle peut être appliqué avec les deux approches de modélisation soit l’approche URM et l’approche ARM. Le modèle est ensuite testé en utilisant des forêts réelles de tailles différentes et des forêts hypothétiques. Enfin, la performance du modèle est comparée avec celle de deux autres modèles proposés par McDill et al. (2002) et Goycoolea et al. (2005) en regard de la qualité de la solution et de la taille des problèmes d’optimisation générés.
8
Figure 1.2: Éléments de recherche du premier article
Le chapitre 3 présente le deuxième article intitulé «Méthodes heuristiques pour la résolution des problèmes de planification forestière larges avec des contraintes d’adjacence» (Voir Figure 1.3). L’objectif est de proposer des méthodologies qui sont faciles à implémenter, qui fournissent des solutions de bonnes qualités et qui génèrent des plans robustes. Deux méthodes de résolution approchées sont proposées pour résoudre le problème de planification forestière en considérant des contraintes d’adjacence. Une heuristique est d’abord développée. Elle n’a jamais été utilisée pour résoudre un problème dans un contexte forestier. Ensuite, une méthode basée sur un indicateur de forme est utilisée pour ne considérer que des blocs de formes désirables. Ce faisant, cette méthode permet de réduire significativement la taille des problèmes traités. Les problèmes résultants sont ensuite résolus en utilisant des méthodes exactes. Des grandes forêts réelles situées dans la région de la Mauricie au Québec sont utilisées pour réaliser l’expérimentation.
9
Figure 1.3: Éléments de recherche du deuxième article
Le chapitre 4 présente le troisième article intitulé « Intégration des opérations forestières et de la propagation du feu dans un modèle stochastique» (Voir Figure 1.4). Cet article présente un modèle d’optimisation qui permet d’intégrer la planification forestière spatiale avec la gestion des feux de forêts. Le modèle maximise la valeur actuelle nette de bois tout en minimisant l’impact du feux sur les ressources et surtout sur des zones critiques prédéfinies. Le modèle est multi-scénarios. Le problème est résolu avec une approche exacte. Des cas d’études hypothétiques sont utilisés pour tester la méthode proposée.
10
Figure 1.4: Éléments de recherche du troisième article
1.4 Conclusion
Ce premier chapitre introduit le problème de l’aménagement forestier en général et les problèmes de la planification forestière spatiale et de la gestion des feux de forêt en particulier. Une brève revue de littérature a été présentée pour expliquer les concepts clés abordés dans cette thèse. À la fin du chapitre, chaque contribution présentée dans la Figure 1.1 ainsi que les problématiques et les méthodologies correspondantes ont été détaillées. Des vues d’ensemble sont présentes dans les Figure 1.2, Figure 1.3 et Figure 1.4 respectivement pour la première, la deuxième et la troisième contribution. Chacune d’elles sera explicitement abordée dans les chapitres suivants de la thèse.
11
Chapitre 2 Méthodes exactes pour la résolution du
problème de planification forestière spatiale
Cet article, intitulé "A new mixed-integer programming model for spatial forest planning", a pour auteurs Chourouk Gharbi, Mikael Rönnqvist, Daniel Beaudoin et Marc-André Carle. Il est publié dans le journal « Canadian Journal of Forest Research », Volume 49, Octobre 2019, Page 1493-1503. La version présentée dans cette thèse est identique à la version publiée.
2.1 Résumé
Le modèle de restriction d’unité et le modèle de restriction de surface sont les deux approches principales pour modéliser l’adjacence dans les problèmes de planification forestière. Dans cet article, nous présentons un nouveau programme mixte qui peut être classifié comme un modèle de restriction d’unité et un modèle de restriction de surface. Nous avons besoin de générer des regroupements réalisables pour formuler le modèle. Cependant, contrairement aux autres approches, il n’est pas nécessaire de générer des contraintes spécifiques qui consomment un effort de calcul très important spécialement pour les cas larges. Nous décrivons et analysons notre approche en la comparant avec les deux approches les plus efficaces qui existent dans la littérature. La comparaison est faite de point de vue modélisation et résolution. Les résultats montrent que le modèle proposé est compétitif de point de vue complexité et taille de formulation. En outre, il est simple à implémenter sur les outils de modélisation standards.
2.2 Abstract
The unit restriction model and the area restriction model are the two main approaches to dealing with adjacency in forest harvest planning. In this paper, we present a new mixed-integer programming (MIP) formulation that can be classified as an area restriction approach and a unit restriction approach. We need to generate feasible clusters to formulate the model. However, unlike other approaches, there is no need to generate specific model constraints representing computationally burdensome clusters for large cases. We describe and analyze our approach by comparing it with the most efficient approaches presented in the literature. Comparisons are made from a modeling and a computational point of view. Results showed that the proposed model was competitive with regard to modeling complexity and size of formulation. Furthermore, it is easy to implement in standard modeling software.
12
2.3 Introduction
Aside from an interest in harvesting planning, forest management researchers and practitioners have an interest in other concerns such as connectivity restriction, wildlife habitat protection and landscape conservation, and size distribution. These concerns have led to new spatial forest management rules to control the spatial development of the forest landscape and forest management activities (Baskent & Keles, 2005). Spatial forest planning problems, including adjacency restrictions, are often developed to address these spatial patterns. Two stands are considered adjacent when they share a common boundary.
The unit restriction model (URM) and area restriction model (ARM) are the two main approaches to deal with adjacency in harvest scheduling models (Murray, 1999). In the URM approach, the boundaries of each potential cutting block are predefined; simultaneous harvesting is prohibited in two adjacent units (Baskent & Keles, 2005). However, ARM models allow simultaneous harvesting of adjacent units, provided their combined area does not exceed the maximum allowable cut size (Murray, 1999). In this approach, harvest block boundaries are not predefined; instead, they are defined through models that determine all the potential harvesting blocks that satisfy a maximum allowable cut (Baskent & Keles, 2005; Goycoolea et al., 2009). A so-called green-up period is used to determine how much time is needed before blocks are no longer considered adjacent and suitable for harvesting.
Many researchers used integer programming or mixed-integer programming models to model spatial forest planning problems. Decision variables usually correspond to harvesting blocks at a particular period of time under environmental and operational constraints. Objective function may be maximizing profit or net present value, minimizing cost or alternatives. These forest management planning problems are hard and usually require a long problem-solving with exact approaches and large cases. In addition, in practical planning for large forest units, the proposed models cannot be used directly due to the large size of the problems. Formulating and solving ARM models is significantly more difficult than formulating and solving URM models (Baskent & Keles, 2005). But unlike URM models, ARM models are more flexible and generate more possibilities of harvesting plans with higher values (Kašpar et al., 2016).
Several authors have addressed spatial modeling with exact methods for solving spatial forest scheduling, such as branch and bound (Constantino, Martins, & Borges, 2008; K. Crowe, Nelson, & Boyland, 2003; Rebain & MacDill, 2003), column generation (Barahona, Weintraub, & Epstein, 1992; Weintraub, Barahona, & Epstein, 1994), and cutting plane (Könny & Tóth, 2013). Exact approaches particularly present computational difficulties for large problems (Goycoolea et al., 2005). To circumvent these drawbacks, other authors proposed heuristics for addressing spatial modeling such as simulating annealing (P. Borges, Eid, & Bergseng, 2014a; Öhman & Eriksson, 2002), tabu search (Caro, Constantino, Martins, & Weintrub, 2003; Richards & Gunn, 2003), and
13
genetic algorithm (Moore, Conroy, & Boston, 2000; Venema, Calamai, & Fieguth, 2005). Researchers have demonstrated that these methods cannot necessarily reach optimality when solving large problems. These methods, however, can find feasible solutions in reasonable time.
Three exact mixed-integer programming formulations were proposed for modeling ARM problems. The first formulation was proposed by McDill et al. (2002), called path formulation. Based on knapsack-type cover inequalities, this formulation requires the enumeration of clusters called minimally infeasible clusters. Their combined area just exceeds the maximum allowable cut size.
The second exact formulation proposed was the generalized management unit approach. In this approach, McDill et al. (2002) used sets of units, known as feasible clusters, whose total area does not exceed the maximum allowable cut size (Goycoolea et al., 2009). This formulation was eventually improved by using maximal clique adjacency constraints; It is referred to as the maximal clique-cluster (MCC) formulation. Note that a maximal clique cannot be a subset of another clique.
The third exact formulation was called Area Restriction with Stand-Clear-Cut variables (ARMSC) (Constantino et al., 2008). Unlike the path and MCC formulations, the ARMSC does not need a priori numeration of sets because every management unit can be assigned to an empty clear-cut set in each planning period. Stands within a clear-cut set could be adjacent. The maximum allowable cut restriction is imposed for each clear-cut set and adjacency constraints are imposed in the model to prevent clear-cut overlapping (Constantino et al., 2008). Goycoolea et al. (2009) found the model was not competitive with respect to the quality of the solution given within a time limit.
Yoshimoto & Asante (2018) recently proposed an exact formulation called the MF_Model I formulation that does not require a priori numeration of sets. The formulation integrates the unit aggregation to form feasible clusters and the spatial restrictions in one model. However, it generates large model sizes. Adjacency is modeled using a pairwise method. This formulation was proposed and compared in previous works (Goycoolea et al., 2005; M. E. McDill et al., 2002). The results showed that it generated many adjacency constraints. Compared to the path formulation, the MF_Model I did not show better performance. But the MF_Model I was better than the path formulation when the two- and three-year green-up periods were used with a ten-year planning horizon. For other cases, the path formulation is better than the MF_Model I formulation.
When it comes to computational time and memory, solving exact formulations for spatial forest planning using ARM approaches is difficult. In most instances, optimal solutions are not reached; it sometimes takes too long to find feasible solutions for practical planning purposes. Many researchers have tried to improve these formulations. For example, Crowe et al. (2003) proposed to add clique constraints to the path formulation to
14
decrease solution time. This formulation did not outperform the original version of the path formulation but provided better LP bound and cut off some fractional solutions. Tóth et al. (2012) were also interested in the path formulation. They proposed to strengthen it by substituting the cover inequalities for others known as extended cover inequalities. In so doing, they proved that proposed constraints are stronger than original ones. However, they noted that computational time associated with this strengthening was considerable. Tóth et al. (2013) also showed that removing adjacency constraints from the model and considering them as lazy constraints had a significant improvement in solution times. Their methods consist in finding a potential solution without using adjacency constraints, iteratively adding them when they are not respected until the desired gap or the optimal solution is reached. Vielma et al. (2007) replaced strict volume constraints with elastic volume constraints in the MCC formulation to reduce their negative effect on the resolution. They showed an improvement in the time allocated to find feasible solutions for almost all problems. However, their approaches still have some shortcomings, especially in controlling strict volume constraint violation and the quality of the feasible solution found.
All exact formulations result in large problems that generally increase exponentially with the number of stands. Most formulations involve a significant preprocessing compilation to enumerate sets. To overcome these shortcomings and deal with adjacency restrictions, we present a new formulation that we call “Full Adjacent Unit (FAU)”. It is a new MIP formulation that can be used as a URM approach and an ARM approach. The FAU/URM-based formulation does not need any a priori enumeration. The FAU/ARM-FAU/URM-based formulation requires a priori enumeration of feasible clusters. For its part, the MCC formulation needs a priori enumeration of feasible clusters and maximal cliques, while the path formulation needs a priori enumeration of minimally infeasible clusters. Restriction on adjacency is formulated through a new set of constraints called “full adjacent units” constraints. Only one “full adjacent units” constraint per stand is needed to prohibit simultaneous, adjacent stand harvesting, making the number of constraints linear to the number of stands, hence dramatically reducing the problem size compared to the other formulations proposed in the literature. Our objective here is to present and compare the performance of the proposed FAU formulation to the path and MCC formulations presented earlier. In addition, we will apply the model on some large cases from forest planning units from Quebec.
In Section 2.4, we will present the path and the MCC formulations, followed by the FAU formulation in Section 2.5. Section 2.6 describes the experimentations and presents the results. We will end the paper with a few concluding remarks in Section 2.7.
2.4 Existing models
2.4.1 Notations
15
Notation Details
P
Set of standsT
Set of planning periodsR
Set of feasible clustersp
R
Set of feasible clusters containing stand pC
Set of maximal cliquesp
N
Set of units that are adjacent to stand p
p p
B card N Number of stands adjacent to stand p
u
A spatial unit that could be a stand, a predefined set of stands or a feasible clusterp
U
Set of units containing standp
. Note thatU
p could be equal to { }p if u represents the standp.M
Set of minimally infeasible clusters,
p t
n
Net present value of stand p in period tt
v
Available volume in period t .p
a
Area of stand pp
g
Initial age of stand pm Number of years in period
s Maximum allowable cut
t
u
Ratio of upper bound of harvesting volume in periodt
t
l
Ratio of lower bound of harvesting volume in periodt
G
16
Figure 2.1 illustrates a hypothetical forest that includes a set { }P of 11 stands. For simplicity, assume that the maximum allowable cut S30ha and that the area of each stand p is
a
p
10
ha
. Two stands are adjacent if they share a common line. In graph theory, cliques are sets of nodes that are mutually adjacent or connected to each other by arcs. A maximal clique is not a subset of any other clique. Therefore,
2,3, 4
belongs to
C
while {2, 3} and {2, 4} are separate because they are contained in
2,3, 4
. Additionally, the set of stands adjacent to stand 1 isN
1
2,3, 6,9,10
. The cluster
1, 2,9
is part of the set R of feasible clusters as it is a contiguous cluster with a total area less than or equal to 30 ha. The cluster
1, 2,6,9
is part ofthe set M of minimally infeasible clusters. A minimally infeasible cluster’s area just exceeds the maximum allowable cut size. It is a contiguous and infeasible set which becomes feasible or not contiguous if any unit is removed from the set (Goycoolea et al., 2009).
Figure 2.1 : Hypothetical forest example with 11 units
Solving spatial forest planning consists of selecting stands p to be harvested in each period
t
of the planning horizon to maximize the net present valuen
p t, while respecting spatial requirements presented in Table 2.1.17
Table 2.1: Spatial requirements (constraints) considered for mathematical formulations
Constraint Type Details
Only harvest once constraint Each stand should be harvested at least once during the planning horizon.
Adjacency constraint In URM, two adjacent harvesting blocs should not be harvested simultaneously. In ARM, adjacent stands should not be harvested concurrently during the green-up period while their combined area exceeds the maximum allowable cut. In this study, we limit the green-up period to one period.
Sustainable yield constraint For each period, the amount of timber harvested should be ranged between an upper bound and a lower bound. The upper bound is equal to a ratio
u
t times the volume harvested in the previous period. The lower bound is equal to a ratiol
t times the volume harvested in the previous period. This constraint satisfies the non-declining even-flow of timber requirement.Average ending age constraint At the end of the planning horizon, the average forest age should be at least equal to a predefined age.
2.4.2 The path formulation
The path formulation was proposed by McDill et al. (2002). This formulation functions by constructing all possible paths or minimally infeasible clusters (Goycoolea et al., 2009). Adjacency constraints are imposed for each path. To ensure a feasible solution, simultaneous harvesting of all stands composing each path (minimally infeasible cluster) is prohibited. The path formulation is described in further detail in Appendix A.
18
2.4.3 The MCC formulation
The MCC formulation defines all feasible clusters and the enumeration of all maximal cliques. The adjacency constraints are satisfied by harvesting at most one feasible cluster among all feasible clusters that intersect each maximal clique. The model is presented further in Appendix B.
2.5 Proposed model (Full adjacent unit formulation)
We propose a new approach to formulate the adjacency restriction that can be efficiently applied for URM and ARM approaches. This formulation is simpler than the others discussed above even when applied as an ARM approach, as it is unnecessary to enumerate sophisticated sets of stands. In this formulation, only the generation of feasible clusters is required when the ARM approach is used. This stand clustering method is easy to implement and represents an important advantage per the easiness of modeling the direct cost saving or the net present value (McDill et al. 2002). Although the proposed model can be used as an ARM approach, the adjacency constraints is satisfied mainly based on the adjacency relation between stands, since the adjacency restriction for one stand depends only on its adjacent stands. Yoshimoto & Brodie (1994) concluded that using adjacency relations to model adjacency constraints did not require a modeling or a computational effort such as many other approaches and algorithms. In their work, they compared many methods to model adjacency and used an adjacency matrix called “the original adjacency matrix.” However, in this model, we use adjacency relations between stands without any matrix notation. We define each stand and each time period
t
, one adjacency constraint that prohibits the simultaneous harvesting of this stand and its adjacent stands when they are not contained in the same harvesting unit. The adjacency constraint, referred to as the “full adjacent unit constraint,” is easy to model. Below we present the URM application and the ARM application of the FAU formulation.2.5.1 Full adjacent unit constraint formulation in URM approach.
Considering:
X
ut as a binary variable that is equal to 1 if unit u is harvested in periodt
and 0 otherwise. The general structure of the FAU constraint is:' ' ' ' '
1
1;
,
p p p p ut u t u U p u U u U p NX
X
p
P t
T
B
(2.1)In relation to the URM, harvesting blocks are predefined. Consequently, a stand is always contained in one harvesting unit. When the potential harvesting blocks are not predefined, stands represent the decision variables. In this case, the FAU constraint becomes:
19 ' '
1
1;
,
p pt p t p N pX
X
p
P t
T
B
(2.2)Referring to Figure 2.1, suppose that each stand has an area less than or equal to the maximal allowable cut. With
N
6
1,3,7,9
, if the stand 6 is harvested in period t , no other stand fromN
6 can be harvested in thesame period. Otherwise, all stands adjacent to stand 6 could be simultaneously harvested if they are not mutually adjacent. The adjacency constraint for the stand 6 in period
t
can thus be expressed as:
6 1 3 7 91
1
4
t t t t tX
X
X
X
X
(2.3)2.5.2 Full adjacent unit constraint formulation in ARM approach
Under the ARM approach, potential harvesting units are the feasible clusters (i.e., all possible stand combinations that form a contiguous set with a total area that does not exceed the maximal allowable cut). The FAU constraint is then:
' ' ' ' '
1
1;
,
p p p p rt r t r R p r R r R p NX
X
p
P t
T
B
(2.4) Where: rtX
is a binary variable that is equal to 1 if cluster r is harvested in periodt
, and 0 otherwise.Again, by referring to Figure 2.1, suppose that each stand area is equal to 10 and the maximal allowable cut is equal to 20 ha. The adjacency constraint for stand 6 becomes:
1 ( ) 1 4 13 19 20 21 1 2 3 5 6 8 10 11 12 14 22 23 26 27 28 29 4 X X X X X X X X X X X X X X X X X X X X X t t t t t t t t t t t t t t t t t t t t t (2.5) Such that: 6
{ ,
4 13,
19,
20,
21}
20
1 2 3 5 6 8 10 11 12 14 22 23 26 27 28 29
{ , , , , , ,
C C C C C C C C C C C C C C C C
, ,
,
,
,
,
,
,
,
}
is the set of the feasible clusters containing stands adjacent to stand 6.Clearly, some stands within
N
6\ 6
are mutually adjacent, hence they could not be harvested at the same time. This restriction is not supported by the adjacency constraints for stand 6. However, it will be enforced when adjacency constraints for all stands are developed.2.5.3 The full adjacent unit formulation
The general structure of the FAU model is as follows:
ut ut t T u U
Max
n X
(2.6) subject to1
ut t T u UX
u U
(2.7) ' ' ' ' '1
1
p p p p ut u t u U p u U u U p NX
X
B
p P t, T (2.8) ( 1) ( 1) t ut ut u t u t t ut ut u U u U u Ul
v X
v
X
u
v X
t 1..(nt1) (2.9)
p p p p ut p p P t T u U p P a g ntm tm g X G a
(2.10)
0,1
utX
u U t, T (2.11)The objective function (2.6) maximizes the net present value of the harvested units. Constraint set (2.7) guarantees that each stand is harvested once at the most. Constraint set (2.8) is the “Full adjacent units” constraints used to account for adjacency. Constraint set (2.9) enforces sustainable yield constraints, while constraint set (2.10) imposes the average ending age of the stands. Finally, constraint set (2.11) states the binary requirement for variables. We refer to this formulation as the Full Adjacent Units formulation (FAU1).
21
2.5.4 Strengthening formulation
In the FAU1 presented above,
B
preflects the number of stands affected by the harvesting of stand p .B
p couldbe large when the forest is tight and the number of adjacent stands for each stand becomes larger. It is possible to reduce the feasible region by reducing the value of
B
p, making the formulation tighter. In Figure 2.1, consider only stand 7 for whichN
7
3, 6,8,9
. Sets
3, 6, 7 , 6, 7,9 , 7,8
are the maximal cliques thatcontain stand 7. The harvesting of stand 7 will affect three sets of stands:
3, 6 , 6,9 , 8 .
Even if stand 7is not harvested, stands 3 and 6 could never be harvested together because of their adjacency. Hence, if
7
3
B
, the adjacency constraint for stand 7 remains true. To generalize the idea, the FAU1 formulation couldbecome tighter if
B
p were equal to the number of maximal cliques containing stand p rather than the number of stands adjacent to p . Thus, the adjacency constraints becomes:' ' ' ' ' '
1
1;
,
p p p p ut u t u U p u U u U p NX
X
p
P
t T
B
(2.8’) Such that: 'p
=card(maximal cliques containing )
B
p
This formulation is referred to the FAU2.
If stand 7 is not harvested, stands that could be concurrently harvested are{3, 9},{8, 9}or{6,8}. Thus, the
maximum number of stands that could be harvested simultaneously is exactly 2 that is smaller than the number of maximal cliques containing stand 7. Note that if '
7
2,
B
the adjacency constraint is still valid. Generally speaking, if 'p
B
represents the maximum number of stands adjacent to p and the stands are not mutually adjacent, the FAU2 formulationcould become stronger. The adjacency constraints become:' ' ' ' '