An efficient application of Bayesian optimization to an industrial MDO framework for aircraft design
17
0
0
Texte intégral
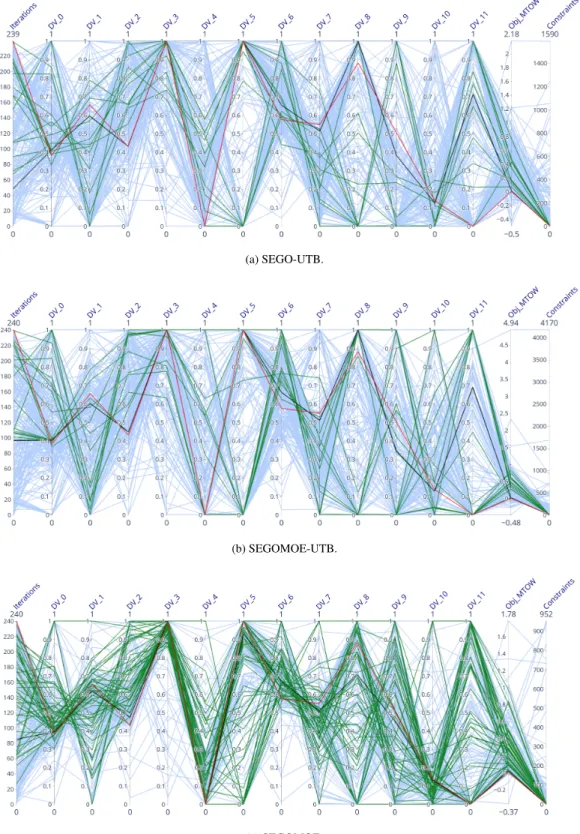
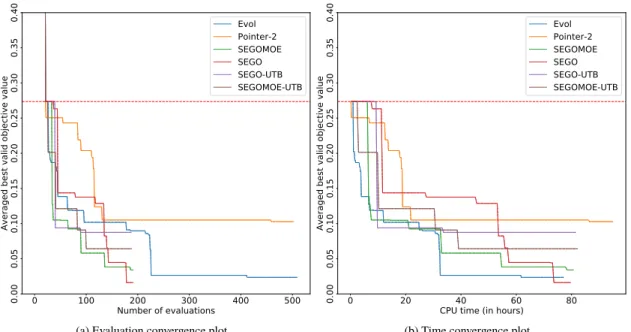
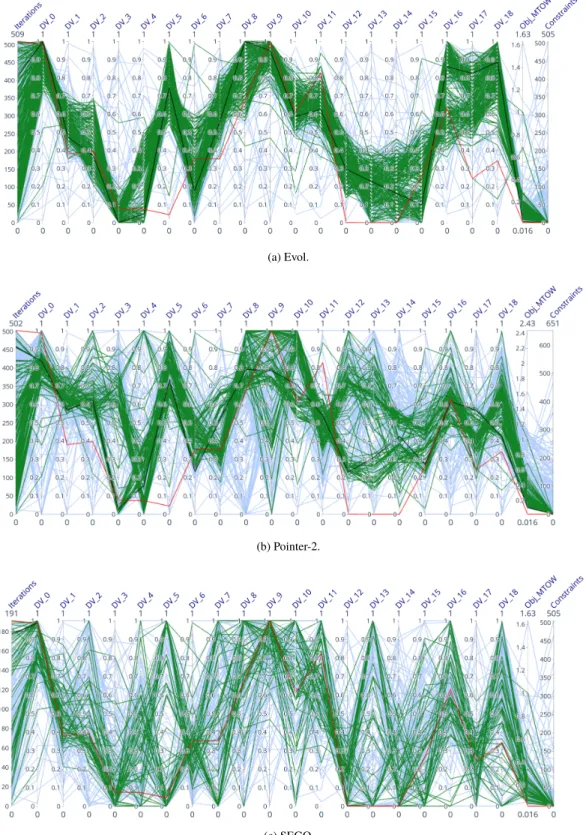
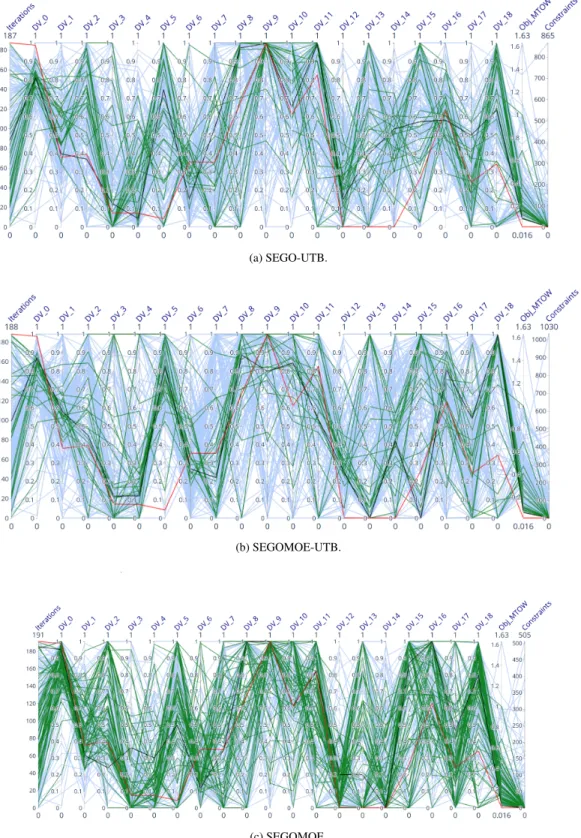
Figure
+5
Documents relatifs
